
Рассмотрим три существующих способа задания движения материальной точки: координатный, векторный и естественный.
Чтобы иметь возможность определить параметры движения точки необходимо задать закон ее движения.
В зависимости от известных величин и поставленной задачи могут быть использованы следующие способы задания движения точки: векторный, координатный и естественный.
- Векторный
- Координатный
- Естественный
- Кинематика. Все определения, понятия, законы и теоремы
- Определение кинематики
- Кинематика точки
- Способы задания движения точки
- Векторный способ задания движения точки
- Координатный способ задания движения точки
- Естественный способ задания движения точки
- Скорость точки
- Скорость при естественном способе задания движения
- Ускорение точки
- Ускорение при естественном способе задания движения
- Скорость и ускорение точки в полярной системе координат
- Классификация движений точки
- Кинематика твердого тела
- Общие теоремы
- Поступательное движение
- Вращательное движение вокруг неподвижной оси
- Определение
- Угловая скорость и ускорение
- Частные случаи вращения тела
- Скорости и ускорения точек вращающегося тела
- Плоское движение твердого тела
- Определение скоростей
- Определение ускорений
- Мгновенный центр ускорений
- Сферическое движение твердого тела
- Свободное движение твердого тела
- Сложное движение точки
- Сложное движение твердого тела
- Сложение двух поступательных движений
- Сложение вращательных движений вокруг пересекающихся осей
- Сферическое движение
- Сложение вращений вокруг 2-х параллельных осей
- Направления вращений совпадают
- Вращения противоположны
- Пара вращений
- Сложение поступательного и вращательного движений
- Поступательное движение перпендикулярно оси вращения
- Винтовое движение
- Поступательное движение под произвольным углом к оси вращения
- Кинематика точки. Методические указания к практческим занятиям по дисциплине «Теоретическая механика»
- (4)
- ,.
Векторный
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.

Координатный
При координатном способе задания движения задаются координаты точки как функции времени:
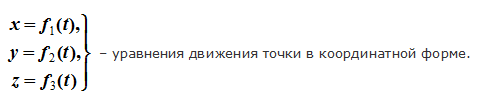
Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t. Чтобы записать ее уравнение в явной форме, надо исключить из них t.
Естественный
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Кинематика. Все определения, понятия, законы и теоремы
Определение кинематики
Кинематика точки
Способы задания движения точки
Существуют следующие способы задания движения точки:
1) векторный; 2) координатный; 3) естественный.
Векторный способ задания движения точки
При векторном способе задания движения точки, положение точки определяется ее радиус-вектором , проведенным из некоторого центра O . При этом, радиус-вектор является функцией от времени t .
Радиус-вектор – это вектор, проведенный от предварительно выбранного центра O к материальной точке M :
.
Годограф вектора – это линия, которую вычерчивает конец вектора при его изменении во времени. При этом начало вектора находится в определенной точке пространства и его положение не меняется со временем.
Таким образом, траектория точки является годографом ее радиус-вектора.
Координатный способ задания движения точки
При координатном способе задания движения точки, мы выбираем систему координат. Обычно это прямоугольная система, но можно выбрать любую другую: цилиндрическую, сферическую и т. п. Тогда положение точки в пространстве определяется тремя координатами. В прямоугольной системе, их обозначают, как правило, буквами x, y, z. Зависимости этих координат от времени определяют закон движения точки:
.
Если движение происходит в одной плоскости, то мы выбираем систему координат в этой плоскости. В результате получаем два уравнения движения:
.
Исключив из этих уравнений параметр t , можно определить траекторию движения в виде функции , или .
При прямолинейном движении, выбрав ось x системы координат вдоль линии движения, имеем одну зависимость . Эта зависимость называется законом прямолинейного движения точки.
Связь между координатным и векторным способами задания движения точки
Пусть x, y, z – координаты точки в прямоугольной системе координат. Тогда
,
где – единичные векторы, проведенные в направлениях координатных осей;
– модуль вектора ;
– направляющие косинусы вектора . То есть это косинусы углов между вектором и осями координат.
Естественный способ задания движения точки
При естественном способе, система координат связана с траекторией движения точки. При этом мы считаем, что сама траектория нам известна. На этой траектории, мы выбираем положение неподвижного центра O . Тогда положение точки определяется длиной дуги s кривой, измеренной вдоль траектории от центра O до положения точки в момент времени t . Закон движения точки определяется как зависимость .
Дуговая координата s – это длина дуги траектории от некоторого неподвижного центра O до текущего положения точки. При этом в качестве центра O выбирается любая точка, принадлежащая траектории. Она является началом отсчета длины дуги s .
Переход от координатного способа к естественному выполняется по формулам:
;
.
Скорость точки
В прямоугольной системе координат, вектор скорости можно записать так:
.
Проекции скорости на оси координат (компоненты) равны производным координат по времени:
.
Модуль скорости: .
Направляющие косинусы: – это косинусы углов между вектором скорости и осями координат.
Равномерное движение точки – это движение, при котором модуль скорости остается постоянным.
Скорость при естественном способе задания движения
Вектор скорости направлен по касательной к траектории:
,
где – единичный вектор, направленный по касательной к траектории в сторону увеличения длины дуги s .
Абсолютная величина скорости равна абсолютной величине производной длины дуги траектории по времени:
.
Если , то движение происходит в сторону увеличения дуговой координаты s . Если , то дуговая координата уменьшается.
Удобно ввести алгебраическую величину скорости . Она равна проекции скорости на направление единичного вектора :
.
Это скалярная величина. В отличии от модуля скорости, она может иметь как положительное, так и отрицательное значение. Далее мы будем использовать следующие обозначения:
– это вектор скорости;
– его абсолютная величина;
– алгебраическая величина скорости – проекция скорости на направление вектора . При движение происходит в сторону увеличения дуговой координаты. При – в сторону уменьшения. Тогда
; .
Ускорение точки
Проекции ускорения на оси координат:
.
Модуль ускорения: .
Направляющие косинусы: .
Ускорение при естественном способе задания движения
При естественном способе задания движения, ускорение раскладывают на два взаимно перпендикулярных вектора: касательное (тангенциальное) к траектории, и нормальное (перпендикулярное) ускорение:
.
Модуль ускорения .
Касательное ускорение:
.
Здесь, как и для скорости, мы считаем, что – это скалярная величина, которая может принимать как положительные, так и отрицательные значения. Тогда
.
Продифференцировав модуль скорости по времени, получим:
.
Отсюда следует, что абсолютное значение производной модуля скорости по времени равно модулю касательного ускорения. Если угол между направлениями векторов ускорения и скорости острый, , то происходит увеличение скорости – ускоренное движение. Если угол тупой , то происходит уменьшение скорости – замедленное движение.
Нормальное ускорение перпендикулярно касательной к траектории и всегда направлено к центру кривизны:
.
Здесь – единичный вектор в направлении главной нормали траектории.
Пусть ρ – радиус кривизны траектории. Тогда модуль нормального ускорения
.
Вектор полного ускорения точки лежит в соприкасающейся плоскости к траектории. Поэтому его проекция на бинормаль равна нулю:
.
Скорость и ускорение точки в полярной системе координат
В полярной системе координат , положение точки M определяется по формулам:
.
Пусть – единичные векторы (орты), проведенные из точки M в сторону увеличения r и φ , соответственно. Тогда вектор скорости выражается через них по формуле:
.
Модуль скорости: ,
где – радиальная скорость; – поперечная скорость.
Ускорение точки
.
Радиальное ускорение: . Поперечное ускорение: . Модуль ускорения: .
Классификация движений точки
1) Прямолинейное равномерное движение.
. В этом случае скорость точки постоянна. Движение происходит по прямой, параллельной вектору скорости.
2) Криволинейное равномерное движение.
. Скорость точки постоянна по абсолютной величине, но движение происходит не по прямой, а по кривой.
3) Прямолинейное неравномерное движение.
. Скорость точки изменяется по абсолютной величине, но траектория прямолинейна.
4) Криволинейное неравномерное движение.
. Скорость точки меняется как по абсолютной величине, так и по направлению. Если направления векторов и совпадают, то это ускоренное движение. В противном случае – замедленное.
5) Равнопеременное криволинейное движение.
. Это частный случай криволинейного неравномерного движения. Здесь касательное ускорение постоянно. Алгебраическая величина скорости меняется по линейному закону: . Длина дуги траектории – по квадратичному: .
Кинематика твердого тела
Общие теоремы
Расстояния между любыми двумя точками абсолютно твердого тела не меняется в процессе его движения. Эти связи приводят к дополнительным ограничениям на скорости движения точек. В результате получаются уравнения, связывающие скорости и ускорения точек. Такие уравнения носят название формул Эйлера.
Формулы Эйлера
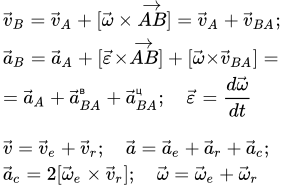
Скорости и ускорения двух точек A и B твердого тела с радиус-векторами и связаны соотношениями:
(Т1) ;
(Т2) .
Здесь – некоторый аксиальный вектор, который называется угловой скоростью;
– вектор углового ускорения.
Доказательство.
Это фундаментальные уравнения. Точку A , при такой форме записи, называют полюсом. Тогда движение твердого тела можно рассматривать как поступательное движение полюса и вращательное движение относительно него.
Отметим еще одну теорему, которую часто применяют в расчетах.
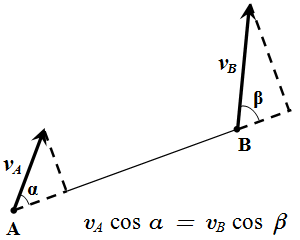
Теорема о проекциях скоростей двух точек твердого тела на прямую
Проекции скоростей двух точек твердого тела на ось, проходящую через эти точки, равны друг другу:
.
Доказательство.
Далее приводится классификация видов движения тела и применение формул Эйлера в конкретных случаях.
Поступательное движение
При поступательном движении все точки тела имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения, их траектории конгруэнтны, а разность радиус-векторов любых двух точек равна вектору, который зависит от положений сравниваемых точек, но не зависит от времени.
При поступательном движении угловая скорость и угловое ускорение равны нулю:
. Тогда формулы Эйлера ⇑ принимают вид:
.
Вращательное движение вокруг неподвижной оси
Определение
При вращении все точки тела движутся в плоскостях, перпендикулярных оси вращения. Их траекториями являются окружности с центром на оси вращения. Положение тела определяется углом поворота φ относительно произвольным образом выбранного нулевого положения. Зависимость угла поворота от времени определяет закон вращательного движения или, что тоже самое, уравнение вращательного движения. Единицей измерения угла поворота является радиан, который считается безразмерной величиной.
180° = π радиан ⇒ 1 радиан = 180/π = 57,29578°.
Угловая скорость и ускорение
Вектор угловой скорости параллелен оси вращения. Его направление определяется правилом правого винта. Он не имеет точки приложения и применим ко всем точкам твердого тела, то есть ко всему телу в целом. Однако, для наглядности, вектор угловой скорости изображают на оси вращения.
Единицей измерения угловой скорости является 1 рад/с или, что тоже самое, 1/с = с –1 . В технике встречаются другие единицы измерения. Пусть n – число оборотов в минуту. Тогда 1 оборот = 2π радиан ; 1 минута = 60 с ; ;
n об/мин = n·2π/60 рад/с. Тогда
.
Угловое ускорение – это производная угловой скорости по времени:
.
Единицей измерения углового ускорения является рад/с 2 или, что тоже самое, с –2 .
Вектор углового ускорения также параллелен оси вращения. При ускоренном вращении он совпадает с направлением угловой скорости. При замедленном – имеет противоположное направление.
Частные случаи вращения тела
Равномерное вращение. Угловая скорость постоянна; угловое ускорение равно нулю: .
Равнопеременное вращение. Угловая скорость линейно меняется со временем; угловое ускорение постоянно: .
Скорости и ускорения точек вращающегося тела
Скорости точек любого твердого тела связаны формулой Эйлера ⇑. Для тела, вращающегося вокруг неподвижной оси, в качестве полюса удобно выбрать любую точку на оси вращения. Тогда скорость точки с радиус-вектором тела, вращающегося с угловой скоростью , определяются по формуле:
.
Здесь – радиус-вектор произвольной точки на оси вращения. Если ось вращения проходит через начало координат, то в качестве можно выбрать точку начала координат . Тогда
.
По правилам векторного произведения,
.
Здесь |CM| – расстояние от точки M до оси вращения (см. рисунок ⇓). Точка M движется по окружности радиуса |CM|. Вектор скорости направлен по касательной к этой окружности в сторону, которая задается направлением вектора угловой скорости.
При вычислении векторного произведения, полезно использовать следующие формулы:
.
Здесь – проекции угловой скорости на оси координат. Таким образом, проекции вектора скорости точки определяются так:
.
Если ось вращения совпадает с осью z, то , .
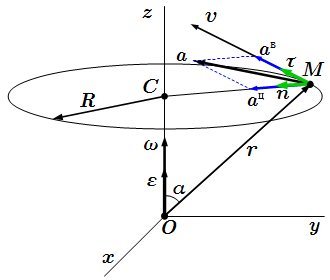
Скорость и ускорение точек твердого тела при вращении вокруг неподвижной оси Oz .
Ускорение точки определяется по формуле:
.
Вращательное ускорение:
;
.
Оно направлено по касательной к траектории и связано с изменением скорости точки по абсолютной величине.
Центростремительное (осестремительное) ускорение:
.
Оно направлено по главной нормали – к центру окружности и по абсолютной величине равно
,
где R – расстояние до оси вращения.
Модуль полного ускорения:
.
Угол β между векторами полного и центростремительного ускорений:
.
Плоское движение твердого тела
При плоском движении, все кинематические величины (перемещения, скорости и т.д.) имеют одинаковые значения для всех плоскостей, параллельных плоскости движения. Поэтому для описания плоского движения, нам достаточно рассмотреть движение любого сечения тела, или как говорят, плоской фигуры. Все результаты, полученные для одной плоской фигуры применимы и для других сечений, параллельных плоскости движения. Хотя плоская фигура имеет свои контуры и характерные точки, но мы считаем, что она не ограничена в размерах, поскольку ее размер может зависеть от выбора сечения. Кроме этого имеются некоторые точки, например мгновенный центр скоростей, которые служат только для проведения расчетов и могут находиться за пределами тела.
Для описания плоского движения, мы выбираем плоскую фигуру; проводим в ней двумерную систему координат x, y. Далее, произвольным образом выбираем точку A . Эту точку мы будем называть полюсом. Тогда положение тела однозначно определяется координатами точки A и углом поворота φ , относительно, произвольным образом выбранного направления, например оси x . При этом движение тела определяется тремя уравнениями, которые называют уравнениями плоского (или плоскопараллельного) движения тела:
.
Эти уравнения также называют уравнениями движения плоской фигуры. При таком описании, движение тела слагается из поступательного движения полюса A , и вращательного движения вокруг него. Поступательное движение зависит от выбора полюса, а угол поворота φ – нет.
Определение скоростей
Скорость точки B с радиус-вектором определяется по формуле Эйлера ⇑:
(П1) .
То есть скорость точки B тела равна векторной сумме скорости полюса A и относительной скорости . Относительное движение является вращением с угловой скоростью относительно оси, проходящей через полюс A перпендикулярно плоскости фигуры. Поскольку вектор угловой скорости перпендикулярен плоскости движения, то он перпендикулярен и вектору скорости. Тогда модуль относительной скорости равен произведению угловой скорости на расстояние от точки до полюса:
.
Мгновенный центр скоростей
Определения и свойства
Далее мы будем обозначать мгновенный центр скоростей буквой P . Для плоской фигуры – это точка. Для твердого тела – это ось, проходящая через точку P перпендикулярно плоскости движения. Эта ось может находиться за пределами тела.
Если плоская фигура движется непоступательно, то мгновенный центр скоростей всегда существует. Для поступательного движения, МЦС находится на бесконечности.
Приняв МЦС P в качестве полюса, получим значение вектора скорости произвольной точки B :
.
Поскольку движение плоское, то . Тогда модуль скорости точки B плоской фигуры равен произведению угловой скорости на расстояние до мгновенного центра скоростей:
.
Вектор скорости перпендикулярен отрезку, соединяющим точку с МЦС и направлен в сторону вращения плоской фигуры.
Скорости точек плоской фигуры пропорциональны их расстояниям до МЦС:
(Ц1) .
Модуль угловой скорости плоской фигуры равен отношению модуля скорости произвольной точки к ее расстоянию до мгновенного центра скоростей:
.
Теорема Шаля
Плоскую фигуру можно переместить из одного положения в любое другое положение одним поворотом этой фигуры вокруг некоторого неподвижного центра, который называют центром вращений, или осью вращений.
Мгновенный центр вращений – это центр вращений, определяемый согласно теореме Шаля, при бесконечно малом перемещении фигуры.
Если рассматривать перемещение плоской фигуры со временем, то мгновенный центр вращений совпадает с мгновенным центром скоростей.
Неподвижная центроида – это геометрическое место мгновенных центров скоростей, отмеченных на неподвижной плоскости.
Подвижная центроида – это геометрическое место мгновенных центров скоростей, отмеченных на плоской фигуре.
Например, если колесо катится без проскальзывания по неподвижной прямой, то неподвижной центроидой является прямая, а подвижной – обод колеса.
Теорема Пуансо
При движении плоской фигуры, подвижная центроида катится без скольжения по неподвижной центроиде.
Определение положения МЦС
1) Если скорости и точек A и B не параллельны, то МЦС есть точка пересечения прямых, проведенных через эти точки, перпендикулярно векторам их скоростей.
2) Если векторы и не равны, параллельны и перпендикулярны прямой AB , то для определения МЦС необходимо знать модули и направления скоростей, и применить формулу (Ц1).
3) Если векторы и равны, то МЦС находится на бесконечности, .
4) Если тело катится без скольжения по неподвижной поверхности, то МЦС находится в точке соприкосновения тела и поверхности.
Определение ускорений
Дифференцируя уравнение Эйлера (П1) по времени, получаем ускорение точки B :
(П1) ;
.
Итак мы нашли ускорение произвольной точки B плоской фигуры. Этот результат можно представить в следующем виде:
.
То есть ускорение произвольной точки B плоской фигуры равно геометрической сумме ускорения полюса и ускорению этой точки относительно полюса , которое определяется по формулам вращательного движения относительно неподвижного центра A . То есть равно геометрической сумме вращательного и центростремительного ускорений:
.
Вращательное ускорение относительно полюса перпендикулярно отрезку AB , соединяющим точку с полюсом. Центростремительное относительное ускорение направлено от точки B к A . Поскольку угловое ускорение также перпендикулярно AB , то
.
Мгновенный центр ускорений
Чтобы построить точку Q нужно выполнить следующие действия.
1) Из полюса A построить вектор ускорения .
2) Из полюса A провести луч AQ под углом к вектору ускорения полюса так, чтобы направление поворота от к AQ совпадало с направлением углового ускорения ε .
3) На луче AQ построить точку Q на расстоянии от точки A .
Приняв точку Q в качестве полюса, получим ускорение произвольной точки B твердого тела:
,
где – единичный вектор касательной к окружности радиуса QB ; – единичный вектор, направленный от B к Q .
Модули ускорений точек плоской фигуры пропорциональны расстояниям от этих точек до мгновенного центра ускорений:
.
Векторы ускорений составляют с отрезками, соединяющими эти точки и мгновенный центр ускорений один и тот же угол
.
Мгновенный центр скоростей P и мгновенный центр ускорений Q являются различными точками плоской фигуры.
Сферическое движение твердого тела
При сферическом движении, точки тела движутся по сферическим поверхностям. Положение тела часто определяют с помощью трех углов ψ, θ, φ , которые называются углами Эйлера. Для этого вводят две системы координат – неподвижную , и подвижную Oxyz , связанную с телом. Связь между ними осуществляется следующим образом.
1) Поворачиваем неподвижную систему координат на угол ψ вокруг оси . Получаем систему .
2) Поворачиваем систему координат на угол θ вокруг оси ON . Получаем систему ONK′z .
3) Поворачиваем систему координат ONK′z на угол φ вокруг оси Oz . Получаем систему координат Oxyz , связанную с телом.
Ось ON называется линией узлов; ψ – угол прецессии; θ – угол нутации; φ – угол собственного вращения. При движении тела, эти углы являются функциями от времени:
.
Теорема Эйлера – Даламбера
Твердое тело, имеющее одну неподвижную точку, можно переместить из одного положения в любое другое поворотом вокруг некоторой оси, проходящей через неподвижную точку.
Следствие теоремы Эйлера – Даламбера
При сферическом движении твердого тела существует ось, на которой скорости точек равны нулю. Такая ось называется мгновенной осью вращения.
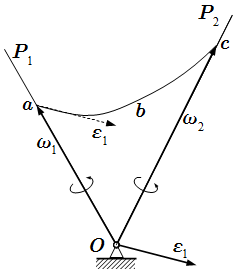
Угловое ускорение ε является касательной к годографу abc угловой скорости. P1, P2 – мгновенные оси вращения.
Угловая скорость тела параллельна мгновенной оси вращения. Для удобства ее вектор откладывают из неподвижной точки. При движении, угловая скорость изменяется как по абсолютной величине, так и по направлению. Конец вектора описывает годограф вектора угловой скорости.
Угловое ускорение – это скорость изменения угловой скорости:
.
Оно направлено по касательной к годографу вектора угловой скорости. При сферическом движении, в отличии от случаев вращения вокруг неподвижной оси и плоского движения, направление вектора углового ускорения может не совпадать с направлением вектора угловой скорости.
Скорости точек тела определяются по формуле Эйлера ⇑. В качестве полюса возьмем неподвижную точку O . Тогда для скорости произвольной точки с радиус-вектором имеем: . Если начало координат выбрать в точке O , то , тогда
.
Модуль скорости определяется по формуле:
,
где α – угол между векторами и ; h – расстояние от точки до мгновенной оси вращения.
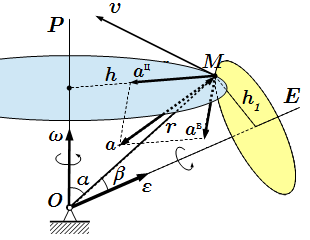
Ускорение при сферическом движении твердого тела.
Ускорение точки определяется по формуле:
.
Вращательное ускорение направлено перпендикулярно плоскости, образованной векторами углового ускорения и радиус-вектором . Оно имеет модуль , где β – угол между векторами и ; – расстояние от точки до оси E, проведенной из неподвижного центра O параллельно вектору углового ускорения.
Центростремительное (осестремительное) ускорение направлено к мгновенной оси вращения P и перпендикулярно ей. По модулю оно равно .
Свободное движение твердого тела
Это самый общий случай движения твердого тела. Свободное тело имеет шесть степеней свободы. Для описания его движения, выберем произвольную точку A тела в качестве полюса. Далее вводим две системы координат – неподвижную OXYZ, и подвижную систему , начало которой в каждый момент времени совпадает с точкой A, а оси параллельны осям неподвижной системы OXYZ. Таким образом, система совершает поступательное движение относительно OXYZ. Тогда свободное движение твердого тела можно рассматривать как сложное движение, состоящее из поступательного движения по закону движения полюса A, и сферического движения в системе координат , с неподвижной точкой A.
Уравнения движения свободного твердого тела представляют собой шесть равенств:
.
Здесь ψ, θ, ϕ – углы Эйлера. Первые три уравнения определяют поступательную часть движения и зависят от выбора полюса. Последние три уравнения определяют сферическое движение, и от выбора полюса не зависят.
Скорость любой точки B тела равна векторной сумме скорости полюса и скорости этой точки при ее сферическом движении относительно полюса:
,
где – радиус-вектор, проведенный из точки A в точку B.
Ускорение точки свободного твердого тела равно векторной сумме ускорения полюса, центростремительного (осестремительного) ускорения точки и ее вращательного ускорения относительно полюса:
.
Сложное движение точки
Для описания сложного движения, мы выбираем неподвижную (основную) систему координат и подвижную . Будем считать, что подвижная система связана с некоторым движущимся твердым телом, относительно которого, в свою очередь движется точка. Например, человек, идущий в движущемся вагоне. Здесь неподвижная система координат – это система, связанная с рельсами и ландшафтом. Твердое тело – вагон. Точка – человек. Подвижная система координат – система, связанная с вагоном. Абсолютное движение – движение человека относительно рельс; относительное движение – движение человека относительно вагона; переносное движение – движение вагона относительно рельс.
Абсолютная скорость (ускорение) точки – это скорость (ускорение) точки в неподвижной системе координат.
Переносная скорость (ускорение) точки – это скорость (ускорение) той точки подвижной системы координат, в которой, в данный момент времени, находится точка, совершающая сложное движение.
Относительная скорость (ускорение) точки – это скорость (ускорение) точки относительно подвижной системы координат.
Теорема о сложении скоростей
При составном движении абсолютная скорость точки равна векторной сумме переносной и относительной скоростей:
.
Модуль абсолютной скорости: .
Эту теорему также называют правилом параллелограмма или треугольника скоростей.
Теорема Кориолиса о сложении ускорений
При составном движении, абсолютное ускорение точки равно векторной сумме переносного , относительного и кориолисова (поворотного) ускорений:
,
где – ускорение Кориолиса (кориолисово ускорение); – угловая скорость вращения подвижной системы координат.
Кориолисово ускорение также называют поворотным ускорением. Оно характеризует изменение направления относительной скорости точки, вызванное вращением подвижной системы координат. Если переносное движение является поступательным, то , кориолисово ускорение равно нулю.
Сложное движение твердого тела
Теперь рассмотрим сложное движение твердого тела – то есть такое движение, при котором твердое тело движется относительно некоторой системы координат , которая, в свою очередь движется относительно неподвижной системы координат . Такое движение часто называют сложением движений. Пусть A – произвольная точка тела, которую мы выберем в качестве полюса. Тогда скорость произвольной точки B тела относительно подвижной системы координат определяется по формуле:
.
В свою очередь, подвижную систему координат также можно рассматривать как твердое тело. Тогда скорость точки B при переносном движении:
.
Применяя теорему о сложении скоростей, найдем скорость точки B относительно неподвижной системы отсчета:
.
Отсюда следует, что скорость полюса относительно неподвижной системы координат равна векторной сумме скоростей полюса при переносном и относительном движениях:
.
Угловая скорость равна векторной сумме угловых скоростей:
.
Рассмотрим частные случаи сложного движения твердого тела.
Сложение двух поступательных движений
При сложении двух поступательных движений, . Тогда . Результирующее движение также является поступательным. Скорость результирующего движения равна сумме скоростей составляющих движений:
.
Сложение вращательных движений вокруг пересекающихся осей
При сложении двух вращательных движений вокруг пересекающихся осей, результирующее движение также является вращательным. При этом ось вращения проходит через точку пересечения осей параллельно вектору абсолютной угловой скорости:
.
Если оси вращения изменяются со временем, то все сказанное выше имеет место для мгновенных осей вращения.
Аналогично предыдущему, при сложении нескольких вращательных движений вокруг пересекающихся осей, результирующее движение также является вращательным. Ось результирующего вращения проходит через точку пересечения осей параллельно вектору абсолютной угловой скорости:
.
Сферическое движение
Как было указано ранее, при сферическом движении, положение тела можно задать с помощью углов Эйлера. Они определяются последовательными переходами от неподвижной системы координат к системе координат , связанной с телом: . Такие переходы можно рассматривать как сложное движение, состоящее из серии вращений ⇑. При этом каждая последующая система координат является повернутой относительно предыдущей на соответствующий угол: ψ, θ, φ , изменяющиеся со временем. Дифференцируя эти углы по времени, получаем угловые скорости вращений систем координат, которые имеют следующие названия:
– угловая скорость прецессии; – угловая скорость нутации; – угловая скорость собственного вращения.
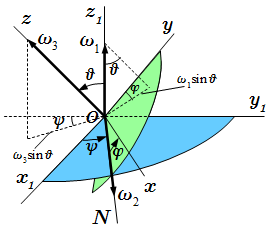
Связь угловых скоростей с углами Эйлера.
Векторы этих угловых скоростей направлены, соответственно, вдоль осей . Тогда вектор угловой скорости тела относительно неподвижной системы координат равен сумме угловых скоростей:
.
Его модуль:
.
Проекции вектора угловой скорости на оси подвижной системы координат Oxyz определяются с помощью кинематических уравнений Эйлера, которые имеют следующий вид:
;
;
.
Сложение вращений вокруг 2-х параллельных осей
Направления вращений совпадают
Если направления вращений совпадают, то угловая скорость, при абсолютном движении, равна сумме модулей угловых скоростей переносного и относительного движений: . Направление вектора совпадает с направлениями векторов и . Движение является плоскопараллельным. Мгновенная ось вращений проходит через точку C (см. рисунок), находящуюся между осями вращений. При этом
;
.
Вращения противоположны
В этом случае, угловая скорость, при абсолютном движении, равна модулю разности абсолютных значений угловых скоростей: , а направление совпадает с направлением наибольшей по абсолютной величине угловой скорости. Движение также является плоскопараллельным. Мгновенная ось вращений проходит через точку C (см. рисунок) так, что ось с наибольшей угловой скоростью оказывается между остальными осями. При этом
;
.
Пара вращений
Пара вращений – это такое сложное движение твердого тела, при котором угловые скорости противоположны по направлению и равны их абсолютные значения: . В этом случае тело совершает поступательное (или мгновенное поступательное движение). Скорости всех точек тела равны . Мгновенная ось вращения находится на бесконечности. Примером такого движения является движение педалей велосипеда относительно рамы.
Сложение поступательного и вращательного движений
Поступательное движение перпендикулярно оси вращения
Если скорость поступательного движения перпендикулярна оси вращения, то это плоскопараллельное движение. Оно имеет мгновенную ось вращения, находящуюся на расстоянии от оси и удаленную от нее в сторону, перпендикулярно вектору .
Винтовое движение
Если скорости и постоянны, то шаг винта также постоянен и определяется по формуле: . При постоянных скоростях и , траекторией любой точки, не лежащей на оси винта, является винтовая линия. При этом скорость точки направлена по касательной к винтовой линии и имеет абсолютное значение , где r – расстояние до оси вращения; – скорость вращательного движения, перпендикулярная оси винта.
Поступательное движение под произвольным углом к оси вращения
Здесь скорость поступательного движения можно разложить на две составляющие – параллельную и перпендикулярную оси вращения . Рассматривая движение в плоскости, перпендикулярной оси вращения, мы можем найти мгновенный центр скоростей P . Он находится на расстоянии от оси . Прибавив сюда скорость , получим винтовое движение с осью . Если скорости меняются со временем, то ось будет мгновенной винтовой осью, а все движение можно рассматривать как состоящее из серии мгновенных винтовых движений вокруг непрерывно изменяющихся винтовых осей. Такое движение называется мгновенно–винтовым движением.
Использованная литература:
А. А. Яблонский, В.М. Никифорова. Курс теоретической механики, часть 1, статика, кинематика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
Автор: Олег Одинцов . Опубликовано: 17-08-2015 Изменено: 29-01-2020
Кинематика точки. Методические указания к практческим занятиям по дисциплине «Теоретическая механика»

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение
«Волгоградский государственный технический университет»
Камышинский технологический институт (филиал)
Волгоградского государственного технического университета
Кафедра «ОБЩЕТЕХНИЧЕСКИЕ ДИСЦИПЛИНЫ»
Методические указания к практическим занятиям
по дисциплине «Теоретическая механика»
Кинематика точки: Методические указания к практическим занятиям по дисциплине «Теоретическая механика» / Сост. , , ; Волгоград. гос. техн. ун-т. – Волгоград, 2006. – 23 с.
Излагаются способы задания движения точки, определение кинематических характеристик при различных способах задания движения точки, а также приводятся примеры решения задач, задания на самостоятельную работу и контрольные вопросы.
Составлены в соответствии с рабочей программой дисциплины «Теоретическая механика» и предназначены в помощь студентам, обучающимся по направлениям 140200.
Ил. 14. Библиогр.: 3 назв.
Рецензент: к. т. н., доцент
Печатается по решению редакционно-издательского совета
Волгоградского государственного технического университета
 технический
технический
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ №1
Тема: кинематика точки.
Цель: изучить способы задания движения точки, научиться определять уравнение траектории точки, ее положение на траектории в заданный момент времени, а также основные кинематические характеристики движения точки при различных способах задания ее движения.
Время проведения: 4 часа.
ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ
- изучить теоретический материал; ответить на контрольные вопросы; разобрать предложенные примеры решения задач; решить самостоятельно предложенные номера задач.
2. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Кинематика – это раздел механики, в котором изучается движение материальных тел в пространстве с геометрической точки зрения, без учёта сил, определяющих это движение.
Основными материальными объектами кинематики, так же как и всей теоретической механики, являются: материальная точка, система материальных точек, абсолютно твердое тело. Первым материальным объектом является материальная точка, кинематика которой и рассматривается в данных методических указаниях.
Основная задача кинематики состоит в том, что бы зная закон движения данного тела (точки), определить все кинематические величины, характеризующие его движение. Чтобы кинематически задать движение точки, надо задать ее положение по отношению к выбранной системе отсчета в заданный момент времени. Существует три способа задания движения точки: естественный, векторный и координатный.
Прежде чем начать изучение данных способов задания движения, необходимо напомнить, что движущаяся точка в пространстве описывает некоторую линию. Эта линия представляет собой место последовательных положений движущейся точки в данной системе отсчёта и называется траекторией.
По виду траекторий движение точки можно разделить на прямолинейное и криволинейное.
2.1. Способы задания движения точки
2.1.1. Естественный способ задания движения точки
 |
В естественном способе задания движения точки траекторией может быть как прямая (рис. 1), так и кривая (рис. 2) линии.
Как видно из рисунков, неподвижная точка О является началом отсчёта дуговой координаты  . Это расстояние может быть как положительным, так и отрицательным. Так как материальная точка движется с течением времени t, следовательно, расстояние от начала отсчёта изменяется также с течением времени t. Это значит, что дуговая координата S является функцией времени:
. Это расстояние может быть как положительным, так и отрицательным. Так как материальная точка движется с течением времени t, следовательно, расстояние от начала отсчёта изменяется также с течением времени t. Это значит, что дуговая координата S является функцией времени:
Если вид функции (1) известен, то, соответственно, для каждого значения t, можно найти значение S, отложить это расстояние по траектории и указать где находится движущая точка М в этот момент времени.
Таким образом, движение точки определено, если известны:
· начало и направление отсчёта дуговой координаты;
2.1.2. Векторный способ задания движения точки
При векторном способе задания движения положение точки в пространстве определяется заданием радиуса-вектора  , проведенного из неподвижного центра O в данною точку M (рис. 3).
, проведенного из неподвижного центра O в данною точку M (рис. 3).
Радиус-вектор – это тоже есть функция, зависящая от времени:
 . (2)
. (2)
Траектория точки является геометрическим местом положения концов радиуса-вектора .
2.1.3. Координатный способ задания движения точки
В координатном способе задания движения точки ее положение определяется тремя декартовыми координатами (x, y, z), которые могут быть выражены в функции параметра времени в виде (см. рис. 3).

 (3)
(3)
Система (3) – это уравнения движения точки в трехмерной декартовой системе координат. Если точка М движется в плоскости, то её движение определяется системой уравнений:
 (4)
(4)
 (4)
(4)Прямолинейное движение выражается одним уравнением:
 . (5)
. (5)
Исключив параметр времени из системы (3) или (4), можно получить уравнение для траектории точки при ее движении в пространстве или на плоскости.
Взаимосвязь между векторным и координатным способами задания движения точки можно установить из известного выражения для радиуса-вектора точки:
 . (6)
. (6)
Здесь координаты x, y, z в функции времени определяются из системы (3). Для плоской задачи, соответственно, из системы (4).
Чтобы определить взаимосвязь между координатным и естественным способами задания движения точки, необходимо:
- Определить траекторию точки. Найти закон движения точки по траектории, для чего исключить параметр t из системы (3), применяя известное выражение дифференциала дуги
 . (7)
. (7)
- И после интегрирования получить
 , (8)
, (8)
где С – const, определяется из начальных условий задачи.
Основными кинематическими характеристиками движения точки являются ее скорость и ускорение. При различных способах задания движения точки они определяются различным образом.
2.2. Определение скорости точки
2.2.1. Определение скорости точки при задании
её движения векторным способом
Скорость – это векторная величина, характеризующая быстроту и направление движения точки в данной системе отсчёта.
 При векторном способе задания движения положение движущейся точки в каждый момент времени определяется радиусом – вектором, который в свою очередь является функцией времени .
При векторном способе задания движения положение движущейся точки в каждый момент времени определяется радиусом – вектором, который в свою очередь является функцией времени .
Предположим, что в определённый момент времени t точка занимает положение М, а в момент времени  – положение М1. Из треугольника ОММ1 , имеем
– положение М1. Из треугольника ОММ1 , имеем  ОМ1 = ОМ+ММ1, т. е.
ОМ1 = ОМ+ММ1, т. е.  ,где ММ1 – приращение радиуса – вектора точки
,где ММ1 – приращение радиуса – вектора точки  за промежуток времени ∆t.
за промежуток времени ∆t.
Можем найти среднюю скорость движения точки по хорде ММ1, равную отношению к ∆t (см. рис. 4), т. е:
 , (9)
, (9)
где направление  совпадает по направлению с .
совпадает по направлению с .
Чтобы определить скорость точки в данный момент времени, выполним предельный переход
 (10)
(10)
Таким образом, вектор скорости точки в данный момент времени равен первой производной по времени от радиуса-вектора данной точки.
2.2.2. Определение скорости точки при задании
её движения координатным способом
Учитывая известную из математики теорему о том, что проекция производной от вектора на какую-либо неподвижную ось равна производной от проекции вектора на ту же ось, а также выражение для вектора скорости через его проекции на оси координат:
 , (11)
, (11)
 и уравнения(3), (6) и (10) получим выражения для определения проекций скорости на оси координат:
и уравнения(3), (6) и (10) получим выражения для определения проекций скорости на оси координат:
 ; ;
; ; (12)
(12)
Проекции скорости точки на неподвижные оси координат равны первым производным от соответствующих координат точки по времени.
Сокращённо можно получить:
 ,
,  ,
,  . (13)
. (13)
Построив прямоугольный параллелепипед, рёбра которого параллельны осям координат, а диагональ совпадает со скоростью  , получим проекции скорости на соответствующие оси координат vX, vY, vZ (см. рис.5).
, получим проекции скорости на соответствующие оси координат vX, vY, vZ (см. рис.5).
Тогда модуль скорости точки:
 . (14)
. (14)
Направление вектора можно вычислить с помощью направляющих косинусов углов:
 (15)
(15)
2.2.3. Определение скорости точки при задании
её движения естественным способом
Для определения скорости точки в случае, когда движение задано естественным способом, необходимо чтобы было известно: траектория движения АВ, начало и направление отсчёта дуговой координаты и уравнение движения точки  (см. рис. 6).
(см. рис. 6).
 Пусть в момент времени t точка занимает положение М, в момент времени t1 = t + ∆t – положение М1. Соответственно дуговые координаты этих положений точки имеют значения:
Пусть в момент времени t точка занимает положение М, в момент времени t1 = t + ∆t – положение М1. Соответственно дуговые координаты этих положений точки имеют значения:
где DS – приращение дуговой координаты DS = ММ1.
ММ1.
Проведя из центра С в точку М радиус-вектор  , определим скорость точки в момент времени t:
, определим скорость точки в момент времени t:
 . (16)
. (16)
Так как радиус-вектор  зависит от дуговой координаты S, т. е.
зависит от дуговой координаты S, т. е.  , то:
, то:
 , (17)
, (17)
где 
 .
.
По направлению вектор  совпадает с вектором
совпадает с вектором  , но
, но  , т. е. вектор
, т. е. вектор  имеет модуль, равный единице и направлен по касательной к кривой АВ в сторону увеличения дуговой координаты. Кроме того, вектор является ортом этого направления. Обозначим этот орт
имеет модуль, равный единице и направлен по касательной к кривой АВ в сторону увеличения дуговой координаты. Кроме того, вектор является ортом этого направления. Обозначим этот орт  (см. рис. 6). Используя формулу (17) можно показать, что:
(см. рис. 6). Используя формулу (17) можно показать, что:
 , (18)
, (18)
где производная  представляет собой проекцию вектора скорости
представляет собой проекцию вектора скорости  на касательную:
на касательную:
 . (19)
. (19)
Тогда модуль вектора скорости равен абсолютному значению производной от дуговой координаты точки по времени:
 (20)
(20)
2.3. Определение ускорения точки
2.3.1. Определение ускорения точки при векторном способе
задания ее движения
Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления вектора скорости точки.
Пусть в некоторый момент времени t движущаяся точка находится в положении М и имеет скорость , а в момент времени t1 приходит в положение М1 и имеет скорость , тогда за промежуток времени Δt = t1-t скорость точки получает приращение  . Вектор
. Вектор  всегда направлен в сторону вогнутости траектории точки.
всегда направлен в сторону вогнутости траектории точки.
Отношение приращения вектора скорости к соответствующему промежутку времени Δt определяет вектор среднего ускорения точки за этот промежуток времени:
 (21)
(21)
Вектор среднего ускорения имеет, очевидно, то же направление, что и вектор, то есть, направлен в сторону вогнутости траектории точки.
 |
Ускорением точки в данный момент времени t называется векторная величина, к которой стремится среднее ускорение  при стремлении промежутка времени Δt к нулю.
при стремлении промежутка времени Δt к нулю.


 (22)
(22)
Следовательно, вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
Найдем, как располагается вектор  по отношению к траектории точки. При прямолинейном движении вектор направлен вдоль прямой, по которой движется точка. Если траекторией точки является плоская кривая, то вектор ускорения , также как и вектор лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор будет направлен в сторону вогнутости траектории и будет лежать в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке М1. В пределе, когда точка М1 стремится к М эта плоскость занимает положение так называемой соприкасающейся плоскости.
по отношению к траектории точки. При прямолинейном движении вектор направлен вдоль прямой, по которой движется точка. Если траекторией точки является плоская кривая, то вектор ускорения , также как и вектор лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор будет направлен в сторону вогнутости траектории и будет лежать в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке М1. В пределе, когда точка М1 стремится к М эта плоскость занимает положение так называемой соприкасающейся плоскости.
Следовательно, в общем случае вектор ускорения лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой траектории точки.
2.3.2. Определение ускорения точки при задании
ее движения координатным способом
Вектор ускорения точки  . Отсюда на основании теоремы о проекции производной и формул (22) получаем:
. Отсюда на основании теоремы о проекции производной и формул (22) получаем:

 . (23)
. (23)
Или  . (24)
. (24)
Таким образом, проекции ускорения точки на оси координат равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление вектора ускорения найдутся из формул:
 (25)
(25)
где α1, β1, γ1 – углы, образуемые вектором ускорения с осями координат.
При движение точки в плоскости, ее скорость и ускорение можно определить на основе системы (4). Расположение векторов скорости и ускорения и их составляющих показаны на рис.8.






 .
.
2.3.3. Определение ускорения точки при задании ее движения
 Возьмем на кривой AB две точки M и M1, соответствующие дуговым координатам OM =DS и OM1 = S+DS. Покажем орты касательных и
Возьмем на кривой AB две точки M и M1, соответствующие дуговым координатам OM =DS и OM1 = S+DS. Покажем орты касательных и  в этих точках. Модуль орта
в этих точках. Модуль орта  , равный 1, постоянен, но направление орта изменяется при перемещении точки по кривой, то есть орт является переменным вектором = (S).
, равный 1, постоянен, но направление орта изменяется при перемещении точки по кривой, то есть орт является переменным вектором = (S).
Определим приращение орта на участке MM1 = DS. Для этого отложим от точки М орт и построим при этой точке параллелограмм, одной из сторон которого будет орт , а диагональю – орт ,тогда другая сторона параллелограмма будет приращением орта  (см. рис. 9).
(см. рис. 9).
Введем вектор  . Он характеризует поворот касательной к кривой на участке ММ1 и называется вектором средней кривизны кривой на участке ММ1. Переходя к пределу и учитывая, что = (S), получим вектор кривизны кривой в данной точке.
. Он характеризует поворот касательной к кривой на участке ММ1 и называется вектором средней кривизны кривой на участке ММ1. Переходя к пределу и учитывая, что = (S), получим вектор кривизны кривой в данной точке.
 . (26)
. (26)
 Определим модуль этого вектора. Для этого рассмотрим треугольник, образованный
Определим модуль этого вектора. Для этого рассмотрим треугольник, образованный  . Угол между векторамии
. Угол между векторамии  называется углом смежности. Модуль
называется углом смежности. Модуль  найдем как длину основания равнобедренного треугольника с малым углом e при вершине и боковыми сторонами, равными 1. Тогда:
найдем как длину основания равнобедренного треугольника с малым углом e при вершине и боковыми сторонами, равными 1. Тогда:
 .
.
и модуль вектора кривизны
 ,
,
где r – радиус кривизны кривой в точке М. Из дифференциальной геометрии известно, что предел отношения угла смежности e к приращению дуговой координаты DS при DS → 0 равен кривизне кривой 1/r, где r – радиус кривизны кривой в точке М. Вектор кривизны  находится в плоскости треугольника (). Предельным положением этого треугольника является соприкасающаяся плоскость. Следовательно, вектор кривизны
находится в плоскости треугольника (). Предельным положением этого треугольника является соприкасающаяся плоскость. Следовательно, вектор кривизны  расположен в соприкасающейся плоскости, а так как он перпендикулярен к вектору
расположен в соприкасающейся плоскости, а так как он перпендикулярен к вектору  , то он направлен по главной нормали к центру кривизны кривой, и показывает скорость поворота касательной в расчете на единицу длины пройденного пути (см. рис. 10).
, то он направлен по главной нормали к центру кривизны кривой, и показывает скорость поворота касательной в расчете на единицу длины пройденного пути (см. рис. 10).
 . (27)
. (27)
Учитывая результаты, полученные в п. 2.2.3., а также введенные выше понятия, определим проекции ускорения на естественные координатные оси.
Так как по уравнению (18)
 , то
, то

Но по формулам (26) и (27)

а  , получим
, получим
 (28)
(28)
Первое слагаемое в уравнении (28) называется нормальным ускорением, а второе – касательным ускорением, т. е.
 , (29)
, (29)
где  . (30)
. (30)
 . (31)
. (31)
Скалярные множители в уравнениях (30) и (31) являются проекциями ускорения точки на главную нормаль и касательную.
Направлены векторы  и
и  следующим образом: всегда направлен в сторону вогнутости кривой, так как 1/ρ всегда больше нуля. А вектор может быть направлен также как орт или в противоположную сторону в зависимости от знака производной
следующим образом: всегда направлен в сторону вогнутости кривой, так как 1/ρ всегда больше нуля. А вектор может быть направлен также как орт или в противоположную сторону в зависимости от знака производной  . Модуль и направление вектора полного ускорения определяются следующим образом
. Модуль и направление вектора полного ускорения определяются следующим образом
 (32)
(32)
3. Примеры решения задач
Задача № 1. Движение точки по плоскости Oxy задано уравнениями  , где b, d, k – постоянные положительные величины. Определить уравнение траектории в координатной форме, значения скорости и ускорения точки в момент времени
, где b, d, k – постоянные положительные величины. Определить уравнение траектории в координатной форме, значения скорости и ускорения точки в момент времени  .
.
 Уравнение траектории точки в координатной форме находим путем исключения времени из уравнения движения. Для этого делим первое уравнение на b, второе – на d, возводим в квадрат и складываем. Получаем уравнение эллипса (рис. 11) с полуосями, равными b и d:
Уравнение траектории точки в координатной форме находим путем исключения времени из уравнения движения. Для этого делим первое уравнение на b, второе – на d, возводим в квадрат и складываем. Получаем уравнение эллипса (рис. 11) с полуосями, равными b и d:
 .
.
При точка имеет координаты х = b, у = 0, т. е. занимает положение М0. Определим проекции скорости и ускорения на оси координат. Имеем:  ,
,  ,
,  ,
,  .
.
Для момента времени  получаем:
получаем:
,.
 ,
,
 .
.По проекциям устанавливаем направление скорости по касательной к траектории и направление ускорения по радиусу-вектору к точке О. Изображаем эти векторы в точке М0 и дополнительно в точках М и М1.
Задача № 2. Точка М движется по дуге окружности радиусом  по закону
по закону
S = R × sin kt, где k = const. Начало и направление положительного отсчета, расстояний и времени указаны на рис. 12. Определить скорость и ускорение точки в момент времени t, а также их значения в точке О и в точке траектории М1, в которой скорость обращается в ноль.
Скорость и проекции ускорения на естественные координатные оси определяем по формулам:
 ,
,
 .
.
Имеем,  ,
,
 .
.
Скорость обращается в нуль, если  , т. е. в момент времени
, т. е. в момент времени  и другие моменты времени, которые в этом примере не рассматриваются. При , т. е. в момент изменения направления движения
и другие моменты времени, которые в этом примере не рассматриваются. При , т. е. в момент изменения направления движения .
.
Подставляя в формулы для  значение t = 0, получаем:
значение t = 0, получаем:
Касательное ускорение в этот момент времени обращается в нуль, т. к. алгебраическая скорость достигает своего максимума.
Задача № 3. Движение точки М задано в декартовых координатах уравнениями:
 , (33)
, (33)
где R, e – постоянные положительные величины, имеющие размерности, R – длины, e – углового ускорения.
Перейти к естественному способу задания движения, т. е. определить траекторию и закон движения точки вдоль траектории в виде S = f(t). Найти также скорость и ускорение точки.
Возведя каждое из уравнений (33) почленно в квадрат, и затем сложив их, получим  . Следовательно, траекторией точки является окружность радиуса R с центром в начале координат. Из уравнений (33) видно, что при t = 0, x = R, y = 0, т. е. точка М находится на оси Ox. Примем это положение M0 за начало отсчета O¢ расстояния S; тогда при
. Следовательно, траекторией точки является окружность радиуса R с центром в начале координат. Из уравнений (33) видно, что при t = 0, x = R, y = 0, т. е. точка М находится на оси Ox. Примем это положение M0 за начало отсчета O¢ расстояния S; тогда при
t = 0, S =0. Когда t > 0 y начинает возрастать, а x – убывать, т. е. точка начинает двигаться по направлению к оси Oy; примем это направление за положительное направление отсчета расстояния S.
Для определения зависимости S = f(t) найдем выражение для dS. Как известно,  , а
, а  . Тогда
. Тогда  , и поскольку при t = 0, S = 0:
, и поскольку при t = 0, S = 0:
 (34)
(34)
Из уравнения (34) находим:
 ,
,
и  .
.
Подставляя это выражение в равенство (34) и вынося постоянный множитель за знак интеграла, получим:
 , или
, или  .
.
Таким образом, точка движется по окружности радиуса R по закону . Скорость точки  и растет пропорционально времени. Далее находим ускорение
и растет пропорционально времени. Далее находим ускорение  ,
,  .
.
Так как at = const и знаки v, at совпадают (v > 0, at > 0), то движение точки является равноускоренным.
Наконец,  ,
,  .
.
Как видим, при t = 0, a = at = R ×e × (an = 0) и  . Затем со време-
. Затем со време-
нем величина a растет, а угол m между вектором ускорения и радиусом окружности убывает, стремясь к нулю.
Задача № 4. Точка, получив направленную горизонтальную скорость, движется по закону, определяемому уравнениями:
x = v0 × t,  ,
,
где v0 и g – некоторые постоянные.
Найти траекторию, скорость и ускорение точки, а также касательное и нормальное ускорения и радиус кривизны траектории в любом положении, выразив их через скорость в этом положении.

Определяя из первого уравнения t и подставляя во второе, получим  . Траектория точки – парабола (рис. 13).
. Траектория точки – парабола (рис. 13).
Дифференцируя уравнения движения по времени, найдем:
 ,
,  ,
,
откуда:  .
.
Таким образом, в начальный момент времени (t = 0) скорость точки v = v0, а затем с течением времени скорость непрерывно возрастает.
Найдем ускорение точки:
 ,
,  .
.
Следовательно, ускорение точки a = g.
В данном случае точка движется с постоянным по модулю и направлению ускорением, параллельным оси Oy (это ускорение силы тяжести). Обращаем внимание на то, что хотя здесь a = const, движение точки не является равнопеременным, так как условием равнопеременного движения является не a = const, a at = const. В этом же движении, как мы сейчас увидим, at не постоянно.
Зная зависимость v от t, найдем at:
 .
.
Но так как  , следовательно,
, следовательно,  .
.
Подставляя это значение t, выразим at через скорость v:
 .
.
Отсюда следует, что в начальный момент, когда v = v0, at = 0. Затем, с увеличением v величина at растет и при v ® ¥, at ® g, следовательно, в пределе величина касательного ускорения стремится к полному ускорению g.
Для нахождения an обратимся к зависимости:
 .
.
 ,
,
 .
.
Таким образом, в начальный момент времени (t=0) v = v0, an = g, а затем с увеличением v величина an убывает, стремясь в пределе к нулю.
Для нахождения радиуса кривизны траектории воспользуемся формулой:
 .
.
Отсюда:  .
.
В начальный момент времени радиус кривизны имеет наименьшее значение  ; затем с увеличением скорости радиус кривизны растет и, следовательно, кривизна траектории уменьшается. При v ® ¥, r ® ¥, а кривизна стремится к нулю.
; затем с увеличением скорости радиус кривизны растет и, следовательно, кривизна траектории уменьшается. При v ® ¥, r ® ¥, а кривизна стремится к нулю.
Задача № 5. Снаряд, вылетевший из ствола орудия, стоящего у подножия возвышенности, поверхность которой наклонена под постоянным углом b к горизонту, движется согласно уравнениям (сопротивлением воздуха пренебрегаем):

 . (36)
. (36)
где a – угол между горизонтом и направлением вылета снаряда.
Определить, под каким углом a следует выстрелить, чтобы получить наибольшую дальность полета вдоль линии ОА (рис. 14).
Исключив время  из уравнений (35) и (36), находим уравнение траектории в явной форме:
из уравнений (35) и (36), находим уравнение траектории в явной форме:
 (37)
(37)
Уравнение прямой ОА, являющейся проекцией поверхности возвышенности на вертикальную плоскость xОy, будет:
Снаряд упадет на землю в точке А, при этом координаты, определяемые уравнениями (37) и (38), станут равными, следовательно:
 ,
,
 .
.
Для определения наибольшей дальности в зависимости от угла вылета a вычисляем производную от х по a и приравниваем ее к нулю:
 ,
,
 ,
,  .
.
Таким образом, наибольшая дальность будет при угле бросания, равном половине угла между вертикалью (отрицательной осью Oy) и откосом ОА.
4. ЗАДАНИЕ НА САМОСТОЯТЕЛЬНУЮ РАБОТУ
По изложенной в методических указаниях теме в соответствии с рабочей программой предусмотрена самостоятельная работа. Задание на самостоятельную работу студент получает от преподавателя на занятии. Чтобы выполнить самостоятельную работу необходимо решить следующие задачи по [3]: 10.1 – 10.22, 11.1 – 11.10, 12.1 – 12.26.
5. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. В чем заключается основная задача кинематики?
2. Что значит «кинематически задать движение точки»?
3. Перечислите основные способы задания движения точки.
4. В чем заключается естественный способ задания движения точки?
5. В чем заключается координатный способ задания движения точки?
6. В чем заключается векторный способ задания движения точки?
7. Каким уравнением определяется взаимосвязь между векторным и координатным способами задания движения точки?
8. Каким уравнением определяется взаимосвязь между координатным и естественным способами задания движения точки?
9. Как определяется средняя скорость точки при векторном способе задания ее движения? Укажите направление вектора.
10. Как определяется скорость точки в данный момент времени при векторном способе задания ее движения? Укажите направление вектора.
11. Как определяется среднее ускорение точки при векторном способе задания ее движения? Укажите направление вектора.
12. Как определяется ускорение точки в данный момент времени при векторном способе задания ее движения? Укажите направление вектора. В какой плоскости располагается вектор?
13. Как определяется модуль и направление вектора скорости точки при координатном способе задания ее движения?
14. Как определяется модуль и направление вектора ускорения точки при координатном способе задания ее движения?
15. Запишите выражения для определения вектора скорости точки по модулю и направлению при координатном способе задания ее движения в случае двумерной постановки задачи.
16. Запишите выражения для определения вектора ускорения точки по модулю и направлению при координатном способе задания ее движения в случае двумерной постановки задачи.
17. Что такое вектор кривизны кривой в данной точке?
18. Как определяется модуль и направление вектора кривизны кривой в данной точке?
19. Как определяются проекции ускорения точки на естественные координатные оси?
20. Определите физический смысл нормального ускорения точки.
21. Определите физический смысл касательного ускорения точки.
22. Получите закон равнопеременного криволинейного движения в случае, если оно является ускоренным.
6. ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА
1. Яблонский теоретической механики. Ч. II. – М.: Высшая школа, 1987. – 531 с.
2. , , Кельзон механика в примерах и задачах. Т. 2. – М.: Наука, 1993. – 623 с.
3. Мещерский задач по теоретической механике. – М.: Наука, 1990. – 417 с.
Составители: Наталья Георгиевна Неумоина
Александр Владимирович Белов
Светлана Григорьевна Корзун
к практическим занятиям по дисциплине
Под редакцией авторов
Темплан 2006 г., поз. № 12.
Подписано в печать г. Формат 60×84 1/16.
Бумага листовая. Гарнитура ”Times“.
Усл. печ. л. 1,44. Усл. авт. л. 1,25.
Тираж 100 экз. Заказ №
Волгоградский государственный технический университет.
400131 Волгоград, просп. им. , 28.
Волгоградского государственного технического университета.