Эта динамическая характеристика применяется для описания одноканальных систем

с нулевыми начальными условиями

Переходная характеристика h(t) — это реакция системы на входное единичное ступенчатое воздействие при нулевых начальных условиях.
 — момент возникновения входного воздействия
— момент возникновения входного воздействия
Рис.2.4. Переходная характеристика системы
Переходные характеристики для различных значений активного сопротивления в электрической цепи:
 |
Чтобы определить переходную характеристику аналитически, следует решить дифференциальное уравнение при нулевых начальных условиях и u(t)=1(t).
Для реальной системы переходную характеристику можно получить экспериментальным путем; при этом на вход системы следует подавать ступенчатое воздействие и фиксировать реакцию на выходе. Если ступенчатое воздействие отлично от единицы, то характеристику на выходе следует разделить на величину входного воздействия.
Зная переходную характеристику, можно определить реакцию системы на произвольное входное воздействие с помощью интеграла свертки
 , , | (2.8) |
где — переменная интегрирования.2.5. Импульсная характеристика
(импульсная функция)
Данная характеристика используется для описания одноканальных систем вида (2.3) с нулевыми начальными условиями.
Импульсная характеристика (функция) — это реакция системы на входное единичное импульсное воздействие при нулевых начальных условиях.
Дельта-функция обладает следующими свойствами:
 | (2.9) |
С помощью дельта-функции моделируется реальное входное воздействие типа удара.
Рис.2.5. Импульсная характеристика системы
Импульсные характеристики для различных значений активного сопротивления в электрической цепи:
| |
Импульсная функция позволяет вычислить реакцию системы на произвольное входное воздействие при нулевых начальных условиях по выражению
 | (2.10) |
Переходная функция и импульсная функция однозначно связаны между собой соотношениями
 | (2.11) |
что позволяет по одной известной характеристике определить вторую.
Переходная матрица
Эта характеристика применяется для описания многоканальных систем вида (2.1) — (2.2) при нулевых входных воздействиях, то есть для автономных систем типа:
   . . | (2.12) |
Переходная матрица — это решение матричного дифференциального уравнения
 | (2.13) |
при нулевых входных воздействиях и единичных начальных условиях
 где
где 
Она обладает следующими свойствами:
 для любого для любого   | (2.14) |
Зная переходную матрицу, можно определить реакцию системы

на произвольное входное воздействие при любых начальных условиях x(0) по выражению
 . . | (2.15) |
Здесь первое слагаемое — свободная составляющая движения, второе — вынужденная. Для выходных переменных имеем
 | (2.16) |
Если система имеет нулевые начальные условия x(0)=0, то
 , , | (2.17) |
 . . | (2.18) |
Матрица  называется матричной импульсной функцией потому что каждая компонента ее представляет собой импульсную функцию
называется матричной импульсной функцией потому что каждая компонента ее представляет собой импульсную функцию  , которая является реакцией i-го выхода на j-ое импульсное входное воздействие при нулевых остальных входных воздействиях и начальных условиях.
, которая является реакцией i-го выхода на j-ое импульсное входное воздействие при нулевых остальных входных воздействиях и начальных условиях.
Для многоканальных систем может быть определена также матричная переходная характеристика в виде
 | (2.19) |
Для линейных систем с постоянными параметрами переходная матрица Ф(t) представляет собой матричную экспоненту
 | (2.20) |
где 
С учетом (2.20) выражения (2.15) и (2.16) принимают вид
 | (2.21) |
 | (2.22) |
Матричная импульсная функция линейной системы с постоянными коэффициентами следующая:
 | (2.23) |
При небольших размерах или простой структуре матрицы A выражение (2.20) может быть использовано для точного представления переходной матрицы с помощью элементарных функций. В случае большой размерности матрицы A следует использовать существующие программы для вычисления матричного экспоненциала.
Передаточная функция
Наряду с обыкновенными дифференциальными уравнениями в теории автоматического управления используются различные их преобразования. Для линейных систем эти уравнения удобнее записывать в символической форме с использованием так называемого оператора дифференцирования
 ,
,
что позволяет преобразовывать дифференциальные уравнения как алгебраические и ввести новую динамическую характеристику — передаточную функцию.
Рассмотрим этот переход для многоканальных систем вида (2.6)


Запишем уравнение состояния в символической форме:
что позволяет определить вектор состояния
 | (2.24) |
и выходные переменные системы
 | (2.25) |
Матрица взаимосвязи между выходными переменными и управляющими воздействиями в выражении (2.25) при нулевых начальных условиях называется матричной передаточной функцией и обозначается
 | (2.26) |
Она представляет собой матрицу со следующими компонентами:
 | (2.27) |
где  — скалярные передаточные функции, которые представляют собой отношение выходной величины к входной в символической форме при нулевых начальных условиях
— скалярные передаточные функции, которые представляют собой отношение выходной величины к входной в символической форме при нулевых начальных условиях 
Собственными передаточными функциями i-го канала называются компоненты передаточной матрицы  , которые находятся на главной диагонали. Составляющие, расположенные выше или ниже главной диагонали, называются передаточными функциями перекрестных связей между каналами.
, которые находятся на главной диагонали. Составляющие, расположенные выше или ниже главной диагонали, называются передаточными функциями перекрестных связей между каналами.
Обратная матрица  находится по выражению
находится по выражению
 | (2.28) |
где  — присоединенная матрица. Как следует из (2.28), все скалярные передаточные функции, которые являются элементами передаточной матрицы (2.27), содержат одинаковый знаменатель — det(pI-A). Он называется характеристическим полиномом и имеет n-ый порядок.
— присоединенная матрица. Как следует из (2.28), все скалярные передаточные функции, которые являются элементами передаточной матрицы (2.27), содержат одинаковый знаменатель — det(pI-A). Он называется характеристическим полиномом и имеет n-ый порядок.
Если теперь характеристический полином приравнять нулю, то получим характеристическое уравнение системы,
| A(p) = det(pI-A) = 0. | (2.29) |
Определить передаточную матрицу для объекта


где 
Воспользуемся выражением для передаточной матрицы (2.27) и найдем предварительно обратную матрицу (2.29). Здесь
Транспонированная матрица имеет вид
 a det(pI-A) = p -2p+1, .
a det(pI-A) = p -2p+1, .
где  — транспонированная матрица. В результате получим следующую обратную матрицу:
— транспонированная матрица. В результате получим следующую обратную матрицу:

и передаточную матрицу объекта
Чаще всего передаточные функции применяются для описания одноканальных систем вида
 | (2.30) |
Используя оператор дифференцирования, запишем уравнение (2.30) в символической форме и найдем передаточную функцию как отношение выходной величины к входной:
 , , | (2.31) |
где  — характеристический полином.
— характеристический полином.
Передаточные функции принято записывать в стандартной форме:
 , , | (2.32) |
где  — коэффициент передачи;
— коэффициент передачи; 

Передаточную матрицу (передаточную функцию) можно также определить с помощью изображений Лапласа или Карсона-Хевисайда. Если подвергнуть одному из этих преобразований обе части дифференциального уравнения и найти соотношения между входными и выходными величинами при нулевых начальных условиях, то получим ту же самую передаточную матрицу (2.26) или функцию (2.31).
Для того, чтобы в дальнейшем различать преобразования дифференциальных уравнений, будем использовать следующие обозначения:
 — оператор дифференцирования;
— оператор дифференцирования;
 — оператор преобразования Лапласа.
— оператор преобразования Лапласа.
Получив одну из динамических характеристик объекта, можно определить все остальные. Переход от дифференциальных уравнений к передаточным функциям и обратно осуществляется с помощью оператора дифференцирования p.
Рассмотрим взаимосвязь между переходными характеристиками и передаточной функцией. Выходная переменная находится через импульсную функцию в соответствии с выражением (2.10),
Подвергнем его преобразованию Лапласа,
 ,
,
и получим y(s) = g(s)u(s). Отсюда определим импульсную функцию:
 | (2.33) |
Таким образом, передаточная функция — есть преобразование по Лапласу от импульсной функции.
Определить передаточную функцию объекта, дифференциальное уравнение которого имеет вид

Используя оператор дифференцирования d/dt = p, запишем уравнение объекта в символической форме


на основании которого определим искомую передаточную функцию объекта

Модальные характеристики
Модальные характеристики соответствуют свободной составляющей движения системы (2.6) или, другими словами, отражают свойства автономной системы типа (2.12)
 | (2.34) |
Будем искать ее решение в виде экспоненты
 | (2.35) |
где  — скалярная экспонента,
— скалярная экспонента,  — вектор начальных условий.
— вектор начальных условий.
Подставляя решение (2.35) в исходное уравнение (2.34), после преобразований получим
 . . | (2.36) |
Система уравнений (2.36) будет иметь ненулевое решение относительно  , если
, если
 . . | (2.37) |
Уравнение (2.37) называется характеристическим и имеет n-корней  , которые называются собственными значениями матрицы A. При подстановке собственных значений в (2.37) получим
, которые называются собственными значениями матрицы A. При подстановке собственных значений в (2.37) получим
 .
.
где  — собственные векторы,
— собственные векторы, 
Совокупность собственных значений и собственных векторов представляет собой модальные характеристики системы.
Для (2.34) могут существовать лишь следующие экспоненциальные решения
 | (2.38) |
которые называют модами. В случае, когда собственные значения вещественные и различные по значениям, полное решение системы (2.34) представляет собой линейную комбинацию мод:
 . . | (2.39) |
Для получения характеристического уравнения системы достаточно общий знаменатель передаточной матрицы (передаточной функции) приравнять нулю (2.29).
Частотные характеристики
Если на вход объекта подавать периодический сигнал заданной амплитуды и частоты, то на выходе будет также периодический сигнал той же частоты, но в общем случае другой амплитуды со сдвигом по фазе. Взаимосвязь между параметрами периодических сигналов на входе и выходе объекта определяют частотные характеристики. Чаще всего их используют для описания одноканальных систем:
 , n >= m. , n >= m. | (2.40) |
Формально обобщенная частотная характеристика  может быть получена из передаточной функции заменой p на
может быть получена из передаточной функции заменой p на 
 | (2.41) |
и представлена в виде
   . . | (2.42) |
Составляющие обобщенной частотной характеристики  имеют самостоятельное значение и следующие названия:
имеют самостоятельное значение и следующие названия:
 вещественная частотная характеристика (ВЧХ),
вещественная частотная характеристика (ВЧХ),- мнимая частотная характеристика (МЧХ),
- амплитудная частотная характеристика (АЧХ),
- фазовая частотная характеристика (ФЧХ).
 вещественная частотная характеристика (ВЧХ),
вещественная частотная характеристика (ВЧХ), мнимая частотная характеристика (МЧХ),
мнимая частотная характеристика (МЧХ), амплитудная частотная характеристика (АЧХ),
амплитудная частотная характеристика (АЧХ), фазовая частотная характеристика (ФЧХ).
фазовая частотная характеристика (ФЧХ).Частотная характеристика по выражению (2.42) может быть построена на комплексной плоскости. В этом случае конец вектора, соответствующий комплексному числу , при изменении  от 0 до
от 0 до  прочерчивает на комплексной плоскости кривую, которая называется амплитудно-фазовой характеристикой (АФХ).
прочерчивает на комплексной плоскости кривую, которая называется амплитудно-фазовой характеристикой (АФХ).

Рис.2.6. Пример амплитудно-фазовой характеристики системы
Фазо-частотная характеристика (ФЧХ) — графическое отображение зависимости сдвига по фазе между входным и выходным сигналами в зависимости от частоты,

Для определения  числитель и знаменатель W(j
числитель и знаменатель W(j  ) разлагаются на множители не выше второго порядка
) разлагаются на множители не выше второго порядка
 ,
,
тогда  , где знак «+» относится к i=1,2. l (числителю передаточной фунции), знак «-» -к i=l+1. L (знаменателя передаточной функции).
, где знак «+» относится к i=1,2. l (числителю передаточной фунции), знак «-» -к i=l+1. L (знаменателя передаточной функции).
Каждое из слагаемых  определяется выражением
определяется выражением
где  .
.
Наряду с АФХ отдельно строят и все остальные частотные характеристики. Так АЧХ показывает, как пропускает звено сигнал различной частоты; причем оценкой пропускания является отношение амплитуд выходного и входного сигнала. ФЧХ показывает фазовые сдвиги, вносимые системой на различных частотах.
Помимо рассмотренных частотных характеристик в теории автоматического управления используются логарифмические частотные характеристики. Удобство работы с ними объясняется тем, что операции умножения и деления заменяются на операции сложения и вычитания. Построенная в логарифмическом масштабе АЧХ, называется логарифмической амплитудной частотной характеристикой (ЛАЧХ)
 , , | (2.43) |
Эта величина выражается в децибелах (дб). При изображении ЛАЧХ удобнее по оси абсцисс откладывать частоту в логарифмическом масштабе, то есть  , выраженную в декадах (дек).
, выраженную в декадах (дек).
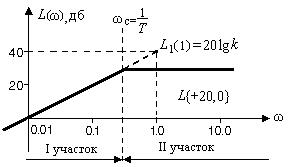
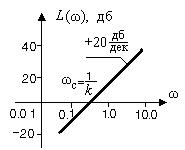
Рис.2.7. Пример логарифмической амплитудной частотной характеристики
В логарифмическом масштабе может быть изображена также и ФЧХ:
Рис.2.8. Пример логарифмической фазовой частотной характеристики
ЛФХ, реальная и асимптотическая ЛАЧХ системы, передаточная функция которой имеет вид:
 . . | (2.44) |
 .
.
Рис. 2.9. Реальная и асимптотическая ЛАЧХ системы
 .
.
Рис. 2.10. ЛФХ системы
СТРУКТУРНЫЙ МЕТОД
3.2. Пропорциональное звено (усилительное, безынерционное)
3.3. Дифференцирующее звено
3.4. Интегрирующее звено
3.5. Апериодическое звено
3.6. Форсирующее звено (пропорционально — дифференцирующее)
3.7. Звено 2-го порядка
3.8. Структурные преобразования
3.8.1. Последовательное соединение звеньев
3.8.2. Параллельное соединение звеньев
3.8.3. Обратная связь
3.8.4. Правило переноса
3.9. Переход от передаточных функций к уравнениям состояния с пользованием структурных схем
3.10. Область применимости структурного метода
Введение
Для расчета различных систем автоматического управления их обычно разбивают на отдельные элементы, динамическими характеристиками которых являются дифференциальные уравнения не выше второго порядка. Причем различные по своей физической природе элементы могут описываться одинаковыми дифференциальными уравнениями, поэтому их относят к определенным классам, называемым типовыми звеньями.
Изображение системы в виде совокупности типовых звеньев с указанием связей между ними называется структурной схемой. Она может быть получена как на основе дифференциальных уравнений (раздел 2), так и передаточных функций. Данный способ и составляет суть структурного метода.
Предварительно рассмотрим подробнее типовые звенья, из которых состоят системы автоматического управления.
Пропорциональное звено
(усилительное, безынерционное)
Пропорциональным называется звено, которое описывается уравнением
| y = k u. | (3.1) |
Передаточная функция звена следующая:
 , , | (3.2) |
а соответствующая ей структурная схема приведена на рис. 3.1.
 Рис.3.1. Структурная схема пропорционального звена Рис.3.1. Структурная схема пропорционального звена | Переходная характеристика (реакция звена на скачкообразное входное воздействие) имеет вид: h(t) = k  1(t) . 1(t) . |
Импульсная функция имеет вид:
g(t) = k  .
.
Модальные характеристики (собственные значения и собственные векторы) для пропорционального звена отсутствуют.
Заменив в передаточной функции p на j получим следующие частотные характеристики:
 Рис.3.2 ВЧХ пропорционального звена Рис.3.2 ВЧХ пропорционального звена | — амплитудно-фазовую: W (j ) k , — вещественную частотную характеристику: R( )=k , — мнимую частотную характеристику, I( )=0 . |
Амплитудная частотная характеристика (АЧХ) определяется соотношением:
 | (3.3) |
и имеет тот же вид, что и ВЧХ. Выражение для ФЧХ:
 . . | (3.4) |
Это означает, что амплитуда периодического входного сигнала усиливается в k — раз, а фазовый сдвиг отсутствует.
 Рис.3.3 АФХ пропорционального звена Рис.3.3 АФХ пропорционального звена | АФХ звена имеет вид точки на комплексной плоскости (рис. 3.3). ЛАЧХ звена представляет собой прямую, параллельную оси абсцисс: |
| L( )=20lg[A( )]=20lg(k) | (3.5) |
 Рис.3.4 ЛАЧХ пропорционального звена Рис.3.4 ЛАЧХ пропорционального звена | Как видим (3.3.), (3.4.), пропорциональное звено пропускает входные сигналы без искажений. |
Дифференцирующее звено
Дифференцирующим называется звено, которое описывается дифференциальным уравнением:
y = k  . . | (3.6) |
Его передаточная функция имеет вид:
| W(p) = y(p)/u(p) = kp. | (3.7) |
 Рис.3.5. Переходная характеристика звена Рис.3.5. Переходная характеристика звена | Переходная характеристика дифференцирующего звена: h(t) = k  (t- (t-  ). ). |
 Рис.3.6. Импульсная характеристика Рис.3.6. Импульсная характеристика | Импульсная функция имеет вид
Получим теперь частотные характеристики звена. АФХ : W(j ВЧХ : R( МЧХ : I( АЧХ : ФЧХ :
|
 (t-
(t-  ) = j k
) = j k  ,
, ,то есть для всех частот звено вносит постоянный фазовый сдвиг;
,то есть для всех частот звено вносит постоянный фазовый сдвиг; Рис.3.7. ЛАЧХ дифференцирующего звена
Рис.3.7. ЛАЧХ дифференцирующего звена )=20lg(k
)=20lg(k  .
. ,
, .
. ,
, .
.
 ; ВЧХ:
; ВЧХ:  ; МЧХ:
; МЧХ:  ;
; ;
; .
. Рис.3.9. ЛАЧХ интегрирующего звена
Рис.3.9. ЛАЧХ интегрирующего звена
 , который представляет собой модальную характеристику интегрирующего звена.
, который представляет собой модальную характеристику интегрирующего звена. .
. ,
, ,
,  — коэффициент передачи звена.
— коэффициент передачи звена. .
. Рис.3.10. Переходная характеристика
Рис.3.10. Переходная характеристика )·1(t).
)·1(t). Рис.3.11. Импульсная функция
Рис.3.11. Импульсная функция (t)=
(t)=  ·1(t).
·1(t). .
. Рис.3.12. ВЧХ звена
Рис.3.12. ВЧХ звена
 .
. Рис.3.13. МЧХ звена
Рис.3.13. МЧХ звена .
. Рис.3.14. АЧХ апериодического звена
Рис.3.14. АЧХ апериодического звена
 Рис.3.15. ФЧХ апериодического звена
Рис.3.15. ФЧХ апериодического звена
 Рис.3.16 АФХ апериодического звена.
Рис.3.16 АФХ апериодического звена. .
. 1/T называется собственной частотой апериодического звена.
1/T называется собственной частотой апериодического звена. Рис.3.17. ЛАЧХ апериодического звена
Рис.3.17. ЛАЧХ апериодического звена ,
, 1(t-
1(t-  (t-
(t-  (t) +
(t) +  (t).
(t). Рис.3.18. Переходная характеристика форсирующего звена
Рис.3.18. Переходная характеристика форсирующего звена ;
; ;
; ;
;  ;
; Рис.3.19. ЛАЧХ форсирующего звена
Рис.3.19. ЛАЧХ форсирующего звена Рис.3.20 АФХ форсирующего звена
Рис.3.20 АФХ форсирующего звена — собственная частота звена. АФХ форсирующего звена строится по выражению (3.36) и имеет вид, представленный на рис. 3.20.
— собственная частота звена. АФХ форсирующего звена строится по выражению (3.36) и имеет вид, представленный на рис. 3.20. ,
, 0, принято записывать в стандартном виде:
0, принято записывать в стандартном виде: ,
, , d — коэффициент демпфирования, который определяет склонность звена к колебаниям,
, d — коэффициент демпфирования, который определяет склонность звена к колебаниям,  ,
,  — коэффициент передачи.
— коэффициент передачи. y + 2d
y + 2d  py + y = ku,
py + y = ku, .
.










 , (2.13)
, (2.13) .
.
 ,
, ,
, ,
,
 .
. ,
, .
. .
.
 .
.
 ,
, . (2.14)
. (2.14)
 . (2.15)
. (2.15) . (2.16)
. (2.16) .
. , то
, то .
. имеет смысл рассматривать только при t = 0, а в этом случае
имеет смысл рассматривать только при t = 0, а в этом случае  , и окончательно выражение для w(t) имеет вид
, и окончательно выражение для w(t) имеет вид .
. δ – функция с площадью
δ – функция с площадью  расположена на оси ординат, а вторая
расположена на оси ординат, а вторая  – экспонента, рассматриваемая для t ≥0. Переходная h(t) и весовая w(t) функции приведены на рис. 33 а) и б), соответственно.
– экспонента, рассматриваемая для t ≥0. Переходная h(t) и весовая w(t) функции приведены на рис. 33 а) и б), соответственно.
 .
.
 φ1(ω) – φ2(ω)
φ1(ω) – φ2(ω) ,
,
 .
. [c -1 ]. Эта частота
[c -1 ]. Эта частота  или
или  . Удобнее всего брать
. Удобнее всего брать  = 0), независимо от того, на I-м или II-м участках расположена эта частота. Затем через точку L1(
= 0), независимо от того, на I-м или II-м участках расположена эта частота. Затем через точку L1(  до пересечения с вертикальной линией, проходящей через
до пересечения с вертикальной линией, проходящей через  или
или