Математические модели в пространстве состояний
Основу математической модели многомерной системы во временной области составляет векторно-матричная форма записи системы дифференциальных уравнений первого порядка, которая носит название уравнения состояния. Уравнение состояния имеет вид
где  вектор состояния размерности
вектор состояния размерности  , который включает в себя переменные объекта, однозначно определяющие его состояние,
, который включает в себя переменные объекта, однозначно определяющие его состояние,
 вектор управления или входа размерности
вектор управления или входа размерности  , который включает в себя сигналы, действующие на систему извне,
, который включает в себя сигналы, действующие на систему извне,
 матрицы параметров, включающие в себя параметры системы, размерность которых соответственно
матрицы параметров, включающие в себя параметры системы, размерность которых соответственно  ,
,
 порядок системы.
порядок системы.
Иногда уравнение состояния (1) записывают в развернутой форме
 .
.
Уравнение состояния и структура полностью описывают объект управления, вектор состояния содержит переменные объекта, которые однозначно описывают его состояние.
Но в реальных системах многие компоненты не могут быть измерены или наблюдаемы с помощью датчиков. Эту ситуацию разрешает введение дополнительного уравнения выхода, которое определяет те переменные, которые доступны для наблюдения (на выходе системы)

где  вектор выхода размерности
вектор выхода размерности  , который содержит переменные объекта, доступные для наблюдения,
, который содержит переменные объекта, доступные для наблюдения,

 матрица параметров размерности
матрица параметров размерности 
в системах управления 
Уравнение выхода (2) также можно записать в развернутой форме
Графически уравнение состояния и уравнение выхода могут быть представлены в виде, показанном на рис. 1.
Символ интегрирования на схеме означает покомпонентное интегрирование векторной величины.
В общем виде пространство состояний  мерной системы задается радиус-вектором
мерной системы задается радиус-вектором  в координатной системе, оси которой определяются компонентами вектора состояния, как это показано на рис. 2.
в координатной системе, оси которой определяются компонентами вектора состояния, как это показано на рис. 2.
Рассмотрим несколько примеров представления процессов в пространстве состояний.
Рассмотрим в пространстве состояний процесс пуска электродвигателя (М) постоянного тока с постоянными магнитами, принципиальная схема установки показана на рис. 3. Пуск производится подключением с помощью контакта (К) напряжения  , при этом в цепи будет протекать ток
, при этом в цепи будет протекать ток  и двигатель будет вращать вал с нагрузкой (Н) со скоростью
и двигатель будет вращать вал с нагрузкой (Н) со скоростью  , ток и скорость определяются с помощью датчиков соответственно ДТ ДС.
, ток и скорость определяются с помощью датчиков соответственно ДТ ДС.
Состояние двигателя в данном случае однозначно определяется током и скоростью двигателя, поэтому вектор состояния задаем в следующем виде
 .
.
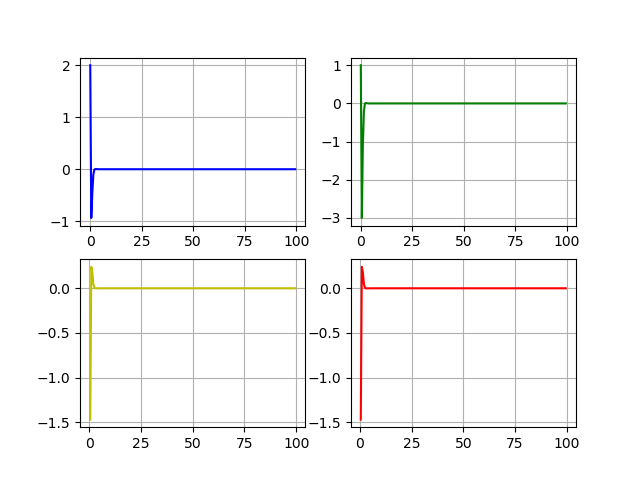
Вектор входа будет иметь только одну компоненту  . Графики изменения во времени переменных двигателя показаны на рис. 4.
. Графики изменения во времени переменных двигателя показаны на рис. 4.
На рис. 4 введены обозначения:  установившиеся значения соответственно скорости и тока,
установившиеся значения соответственно скорости и тока,  максимальное значение тока при пуске.
максимальное значение тока при пуске.
Сформируем двухмерное пространство состояний двигателя с траекторией движения конца вектора состояния в процессе пуска, для этого откладываем проекции вектора, то есть ток и скорость, в одинаковые моменты времени.
Рассмотрим в пространстве состояний процесс позиционирования, то есть перемещения вала в заданное положение  , в автоматизированном электроприводе, показанном на рис. 6.
, в автоматизированном электроприводе, показанном на рис. 6.
В этом случае состояние двигателя и всей системы электропривода в целом определяют три переменные двигателя ток  , скорость
, скорость  и положение вала
и положение вала 
 .
.
Графики изменения во времени переменных двигателя показаны на рис. 7.
Сформируем трехмерное пространство состояний электропривода с траекторией движения конца вектора состояния в процессе позиционирования по временным графикам изменения компонент вектора состояния.
Теперь рассмотрим получения математической модели многомерного объекта в виде уравнений состояния на примере двухмассовой упругой механической системы, показанной на рис. 9.
Двухмассовая упругая система представляет собой механическую систему, состоящую из двух вращающихся масс с моментами инерции  и
и  . К каждой массе прикладывается извне момент (
. К каждой массе прикладывается извне момент (  и
и  ), массы соединены валом, обладающим упругими свойствами (
), массы соединены валом, обладающим упругими свойствами ( ), массы вращаются со скоростями
), массы вращаются со скоростями  и
и  .
.
Система дифференциальных уравнений, описывающих систему, имеет вид
где  разность углов положения первой
разность углов положения первой  и второй
и второй  масс.
масс.
Так как уравнения состояния (1) и выхода (2) имеют единый для всех линейных систем вид, поэтому, чтобы определить их для конкретной системы мы должны выполнить следующее:
задать векторы состояния и входа, определив тем самым порядок системы и порядок вектора входа,
определить матрицы параметров уравнений.
Состояние системы определяется тремя переменными  , поэтому задаем вектор состояния следующего вида
, поэтому задаем вектор состояния следующего вида
 .
.
Порядок системы  . Заметим, что положение переменных в векторе состояния можно задать произвольно, но в дальнейшем изменять его нельзя. Вектор входа определяется сигналами, действующими на систему извне, а это моменты
. Заметим, что положение переменных в векторе состояния можно задать произвольно, но в дальнейшем изменять его нельзя. Вектор входа определяется сигналами, действующими на систему извне, а это моменты  и
и  , поэтому вектор входа имеет вид
, поэтому вектор входа имеет вид
 .
.
Порядок вектора выхода  . Здесь также порядок следования компонент может быть произвольным, но фиксированным в дальнейших операциях.
. Здесь также порядок следования компонент может быть произвольным, но фиксированным в дальнейших операциях.
Преобразуем уравнения системы (3) к форме Коши
Нам требуется получить уравнение состояния для системы третьего порядка с вектором входа второго порядка, посмотрим, что представляет собой это уравнение в общем виде
 .
.
Раскрывая матричные скобки, получим
Теперь можно сформулировать задачу следующего этапа. Необходимо привести систему (4) в виду (5), для этого следует:
расположить уравнения в порядке следования компонент в векторе состояния,
расположить слагаемые в правых частях слева на право в порядке следования сначала компонент вектора состояния, затем вектора входа,
отсутствующие слагаемые заменяем произведениями переменных на нулевые коэффициенты.
В результате коэффициенты в правых частях при соответствующих компонентах векторов состояния и входа будут компонентами искомых матриц уравнения состояния.
Преобразуем систему (4) к виду (5), в результате получим
В результате по коэффициентам слагаемых в правых частях (6) получим искомые матрицы параметров уравнения состояния
Уравнение состояния в развернутом виде
Вид уравнения выхода определяется тем, какие компоненты вектора состояния доступны для наблюдения. В электромеханических системах электроприводов, эквивалентом которых является упругая двухмассовая система, возможны три варианты датчиковых систем (полагаем датчики безынерционными, а коэффициенты преобразования датчиков единичными):
Датчики скорости установлены на обеих массах. Тогда имеем следующее уравнение выхода

То есть имеем  ,
,
Датчик скорости установлен на первой массе, уравнение выхода
 ,
, 
Датчик скорости установлен на второй массе, уравнение выхода
 ,
, 
Контрольные вопросы и задачи
Перечислите компоненты уравнения состояния (векторы и матрицы), их размерности.
Поясните смысл уравнения выхода, перечислите компоненты и их размерности.
По системе дифференциальных уравнений, описывающих многомерную систему
 ,
,
полагая векторы состояния и входа
 ,
,
записать уравнение состояния в развернутой форме.
 .
.
По уравнению состояния
 ,
,
описывающему многомерную систему, определить систему дифференциальных уравнений, связывающих компоненты векторов состояния и входа.
. .
.
По системе дифференциальных уравнений, описывающих многомерную систему
полагая векторы состояния и входа
 ,
,
записать уравнение состояния в развернутой форме.
 .
.
- Пространство состояний в задачах проектирования систем оптимального управления
- Введение
- Теория кратко
- Разработка программы формирующей модель двигателя с проверкой матриц на наблюдаемость и управляемость:
- Пример проектирования оптимальной системы управления с дискретным dlqr контролером и полной обратной связью
- Программа, формирующая модель оптимального управления с dlqr контролером
- Вывод
- Понятие пространства состояний
Пространство состояний в задачах проектирования систем оптимального управления

Введение
Исследование системы управления во временной области с помощью переменных состояния широко используется в последнее время благодаря простоте проведения анализа.
Состоянию системы соответствует точка в определённом евклидовом пространстве, а поведение системы во времени характеризуется траекторией, описываемой этой точкой.
При этом математический аппарат включает готовые решения по аналоговому и дискретному LQR и DLQR контролерам, фильтра Калмана, и всё это с применением матриц и векторов, что и позволяет записывать уравнения системы управления в обобщённом виде, получая дополнительную информацию при их решении.
Целью данной публикации является рассмотрение решения задач проектирования систем оптимального управления методом описания пространства состояний с использованием программных средств Python.
Теория кратко
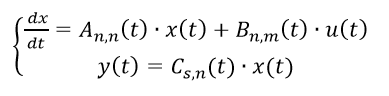
Векторно-матричная запись модели линейного динамического объекта с учетом уравнения измерения принимает вид:
 (1)
(1)
Если матрицы A(t), B(t) и C(t) не зависят от времени, то объект называется объектом с постоянными коэффициентами, или стационарным объектом. В противном случае объект будет нестационарным.
При наличии погрешностей при измерении, выходные (регулируемые) сигналы задаются линеаризованным матричным уравнением:
 (2)
(2)
где y(t) – вектор регулируемых (измеряемых) величин; C(t) – матрица связи вектора измерений с вектором состояний; v(t) – вектор ошибок измерений (помехи).
Структура линейной непрерывной системы, реализующая уравнения (1) и (2), приведена на рисунке:
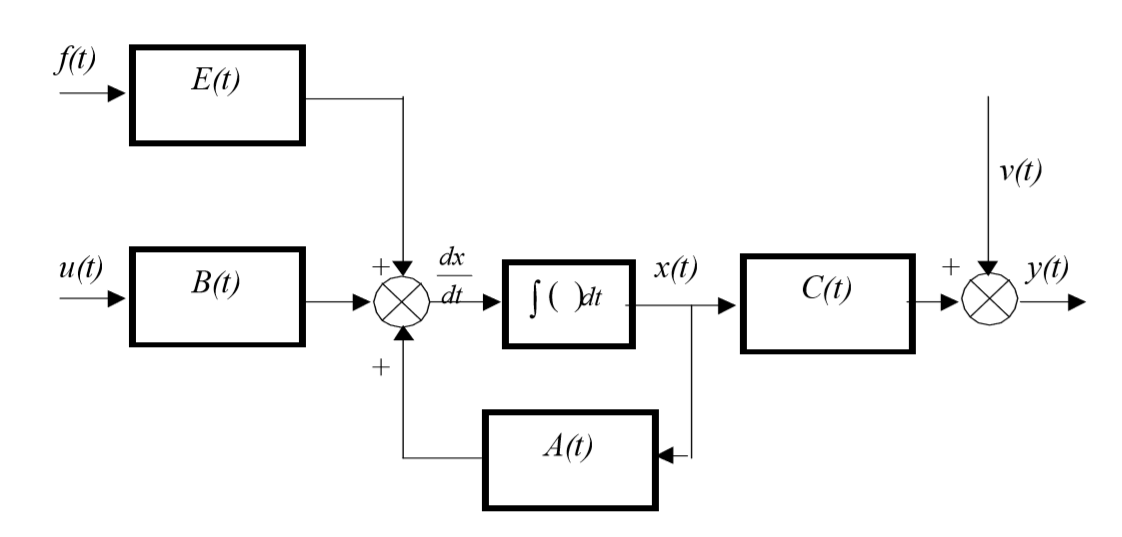
Данная структура соответствует математической модели объекта, построенной в пространстве состояний его входных x(t), u(t), выходных y(t) и внутренних, или фазовых координат x(t).
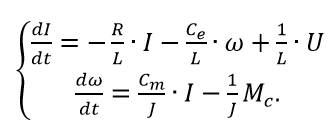
Для примера рассмотрим математическую модель двигателя постоянного тока с независимым возбуждением от постоянных магнитов. Система уравнений электрической и механической частей двигателя для рассматриваемого случая будет выглядеть так:
 (3)
(3)
Первое уравнение отражает взаимосвязь между переменными в цепи якоря, второе — условия механического равновесия. В качестве обобщенных координат выберем ток якоря I и частоту вращения якоря ω.
Управлением являются напряжение на якоре U, возмущением — момент сопротивления нагрузки Mc. Параметрами модели являются активное сопротивление и индуктивность цепи и якоря, обозначенные соответственно Rя, и Lя, а также приведенный момент инерции J и конструктивные постоянные се и см (в системе СИ: Cе=См).
Разрешая исходную систему относительно первых производных, получим уравнения двигателя в пространстве состояний.
 (4)
(4)
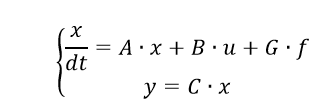
В матричном виде уравнения (4) примут вид (1):
 (5)
(5)
где вектор обобщенных координат  , вектор управлений U =u (в рассматриваемом случае он является скаляром), вектор (скаляр) возмущений Mc=f. Матрицы модели:
, вектор управлений U =u (в рассматриваемом случае он является скаляром), вектор (скаляр) возмущений Mc=f. Матрицы модели:
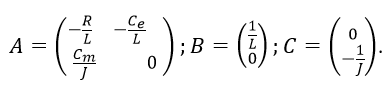 (6)
(6)
Если в качестве регулируемой величины выбрать частоту вращения, то уравнение измерения запишется в виде:
 (7)
(7)
а матрица измерений примет вид:
Сформируем модель двигателя в Python. Для этого вначале зададим конкретные значения параметров двигателя: U = 110 В; R =0,2 Ом; L = 0,006 Гн; J =0,1 кг/м2;Ce =Cm=1,3 В/С и найдем значения коэффициентом матриц объекта из (6).
Разработка программы формирующей модель двигателя с проверкой матриц на наблюдаемость и управляемость:
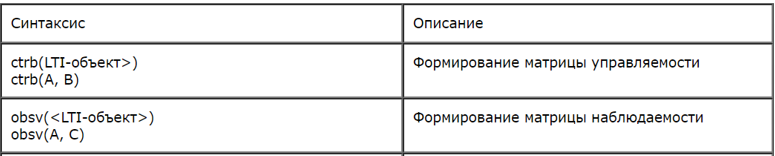
При разработке программы использовалась специальная функция def matrix_rank для определения ранга матрицы и функции, приведенные в таблице:
Результаты работы программы:
Матрица А:
[[ -33.33333333 -216.66666667]
[ 13. 0. ]]
Матрица B:
[[166.66666667]
[ 0. ]]
Матрица C:
[[0 1]]
Скаляр D:
0
Передаточная функция двигателя:
2167/(s^2 + 33.33 s + 2817)
Ранг матрицы управляемости: 2
Ранг матрицы наблюдаемости: 2

1. На примере двигателя постоянного тока с независимым магнитным возбуждением рассмотрена методика проектирования управления в пространстве состояний;
2. В результате работы программы получены передаточная функция, переходная характеристика, а так же ранги матриц управляемости и наблюдаемости. Ранги совпадают с размерностями пространства состояний, что подтверждает управляемость и наблюдаемость модели.
Пример проектирования оптимальной системы управления с дискретным dlqr контролером и полной обратной связью
Определения и терминология
Линейно-квадратичный регулятор (англ. Linear quadratic regulator, LQR) — в теории управления один из видов оптимальных регуляторов, использующий квадратичный функционал качества.
Задача, в которой система описывается линейными дифференциальными уравнениями, а показатель качества, представляет собой квадратичный функционал, называется задачей линейно-квадратичного управления.
Широкое распространение получили линейно-квадратичные регуляторы (LQR) и линейно-квадратичные гауссовы регуляторы (LQG).
Приступая к практическому решению задачи всегда нужно помнить об ограничениях
Для синтеза оптимального дискретного регулятора линейных стационарных систем нужна функция численного решения уравнения Беллмана.Такой функции в библиотеке Python Control Systems [1] нет, но можно воспользоваться функцией для решения уравнения Риккати, приведенной в публикации [2]:
Но нужно ещё учесть ограничения на синтез оптимального регулятора, приведенные в [3]:
- система, определяемая матрицами (A, B) должна быть стабилизируема;
- должны выполняться неравенства S> 0, Q – N/R–N.T>0, пара матриц (Q – N/R–N.T,
A – B/R–B.T) не должна иметь наблюдаемые моды с собственными значениями на
действительной оси.
После копаний в обширной и не однозначной теории, которую, по понятным причинам, я не привожу, задачу удалось решить, и все ответы можно прочитать прямо в комментариях к коду.
Структурная схема регулятора системы управления с обратной связью по всем переменным состояния изображена на рисунке:

Для каждого начального состояния x0 оптимальный линейный регулятор порождает оптимальное программное управление u*(x, k) и оптимальную траекторию х*(k).
Программа, формирующая модель оптимального управления с dlqr контролером
K=
[[ 0.82287566 -0.17712434]
[ 0.82287566 -0.17712434]]
P=
[[ 3.73431348 -1.41143783]
[-1.41143783 1.16143783]]
E=
[0.17712434+0.17712434j 0.17712434-0.17712434j]
Динамика состояний и управлений: x1, x2, u1, u2.
Вывод
Отдельные задачи оптимального управления по типу приведенных можно решать средствами Python, комбинируя возможности библиотек Python Control Systems, SciPy,NumPy, что, безусловно, способствует популяризации Python, учитывая, что ранее такие задачи можно было решать только в платных математических пакетах.
Понятие пространства состояний
I. Теоретический
При этом подходе математическая модель строится на основании общих законов, которыми описываются процессы в звене. Эти законы записываются с помощью системы уравнений, связывающей входные переменные, а именно управляющие и возмущающие воздействия, с выходными. Обычно это уравнения баланса массы, энергии, количества движения.
В таком варианте математическая модель получается в виде системы неоднородных нелинейных дифференциальных уравнений, не имеющей общего решения. При этом исходная математическая модель очень сложна для анализа, т.к. существуют только частные решения, и провести обобщение практически невозможно.
Иногда задачу интегрирования нелинейных уравнений удаётся свести к более простой задаче: решение линейных дифференциальных уравнений. Достаточным условием для проведения линеаризации является отсутствие неразрывных, неоднозначных функций.

Линеаризация основана на положении, что непрерывная и имеющая все производные в окрестности некоторой точки функция может быть разложена в ряд Тейлора по степеням малых отклонений элемента:


Если отклонение аргумента DU мало, то можно ограничится первыми линейными членами разложения и рассматривать вместо нелинейной функции x=f(u) линейную. Опуская символ приращения D, получим:
 , где
, где
k – коэффициент усиления звена.
В результате линеаризации получим линеаризованную математическую модель, которую обычно называют линейной математической моделью звена или системы.
В зависимости от необходимой точности можно брать различные DU, но на практике встречаются случаи, когда линеаризацию провести нельзя. Обычно это связанно с наличием в системе элементов с зонами нечувствительности, насыщения, ограничениями по положению и скорости, а так же релейных элементов. В этих случаях используют нелинейную модель, а при анализе и синтезе специальные методы.
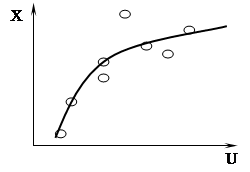
II. Эмпирический
При построении эмпирической модели не обязательно знать природу процессов, протекающих в звене, достаточно иметь сведения об их внешних проявлениях. Достаточно исследовать реакции выходных переменных на известные входные воздействия. В результате выбирается общий вид функциональной зависимости между входным и выходным воздействием, затем определяются численные коэффициенты или параметры модели.
 Ограничения: решение задачи основано на конкретном эксперименте, что делает невозможным применение к другим системам.
Ограничения: решение задачи основано на конкретном эксперименте, что делает невозможным применение к другим системам.
Понятие пространства состояний
СУ принято описывать с помощью переменных состояния, которые полностью определяют состояние системы в каждый момент времени. Переменные состояния можно рассматривать как координаты, отложенные на соответствующие оси. Тогда каждому состоянию системы будет соответствовать вполне определенная точка в пространстве состояний.
Размерность пространства состояний равна порядку системы дифференциальных уравнений, описывающих её поведение. Координатами пространства состояний являются переменные xi системы уравнений, записанные в нормальной форме Коши.
Рассмотрим линейную, детерминированную, стационарную модель, которая описывается уравнениями:

В терминах пространства состояния здесь:
x – это вектор столбец координат состояния размерностью nх1,
U – вектор столбец управляющего воздействия размерностью mх1,
y – вектор столбец измерения размерностью rх1,
A – матрица коэффициентов координат состояния размерностью nхn,
B – матрица коэффициентов управляющего воздействия размерностью nхm,
C — матрица коэффициентов измеряемых переменных размерностью rхn.
Рассмотрим нелинейную, детерминированную, нестационарную модель:

где F, G – нелинейные векторы функций, компонентами которых являются правые части исходной системы дифференциальных уравнений.
Модель в пространстве состояний связана с записью дифференциальных уравнений в стандартной форме Коши (в виде системы уравнений первого порядка):

Здесь  – вектор переменных состояния размера
– вектор переменных состояния размера  ,
,  – вектор входных сигналов (вектор управления) размера
– вектор входных сигналов (вектор управления) размера  и
и  – вектор выходных сигналов размера
– вектор выходных сигналов размера  . Кроме того,
. Кроме того,  и
и  – постоянные матрицы. Согласно правилам матричных вычислений, матрица
– постоянные матрицы. Согласно правилам матричных вычислений, матрица  должна быть квадратной размера
должна быть квадратной размера  , матрица
, матрица  имеет размер
имеет размер  , матрица
, матрица  –
–  и матрица –
и матрица –  . Для систем с одним входом и одним выходом[1] матрица – скалярная величина.
. Для систем с одним входом и одним выходом[1] матрица – скалярная величина.
Это означает, что матрицы модели имеют вид
 ,
,  ,
,  ,
,  .
.
Модель в пространстве состояний можно построить не для всех передаточных функций, а только для правильных, у которых степень числителя не выше, чем степень знаменателя. Например, передаточная функция

– неправильная, она не может быть преобразована в модель в пространстве состояний.
Используют также понятие строго правильной функции, у которой степень числителя меньше, чем степень знаменателя. Если построить модель в пространстве состояний для такой функции, матрица будет равна нулю, то есть, прямая передача с входа на выход отсутствует (при скачкообразном изменении входа сигнал на выходе будет непрерывным).