Один из простейших методов нахождения корней нелинейных уравнений состоит в следующем. Допустим, что нам удалось найти отрезок [а, b], на котором расположено искомое значение корня (далее мы предполагаем, что х = с – единственный корень на отрезке [а, b], а если корней на [а, b] несколько, то в результате применения метода деления отрезка пополам и метода хорд (см. разд. 1.1.3) будет найдено приближенное значение одного из корней) х = с, т.е.  .
.
В качестве начального приближения корня с0 принимаем середину этого отрезка: с0=(а+b)/2. Далее исследуем значения функции F(x) на концах отрезков [а, с0] и [с0, b], т.е. в точках а, с0, b. Тот из отрезков, на концах которого F(x) принимает значения разных знаков, содержит искомый корень; поэтому его принимаем в качестве нового отрезка [a1,b1]. Вторую половину отрезка [а, b], на которой знак F(x) не меняется, отбрасываем. В качестве первого приближения корня принимаем середину нового отрезка c1 = (a1+b1)/2 и т.д. Таким образом, k-е приближение вычисляем как
 (1.2)
(1.2)
После каждой итерации отрезок, на котором расположен корень, уменьшается вдвое, а после kитераций он сокращается в 2kраз:
 (1.3)
(1.3)
Пусть приближенное решение  требуется найти с точностью до некоторого заданного малого числа ε > 0:
требуется найти с точностью до некоторого заданного малого числа ε > 0:
 (1.4)
(1.4)
Взяв в качестве приближенного решения k-еприближение корня:  , запишем (1.4) с учетом обозначения — сk в виде:
, запишем (1.4) с учетом обозначения — сk в виде:
 (1.5)
(1.5)
Из (1.2) следует, что (1.5) выполнено, если
 (1.6)
(1.6)
Таким образом, итерационный процесс нужно продолжать до тех пор, пока не будет выполнено условие (1.6).
Метод деления отрезка пополам проиллюстрирован на рис. 1.1. Пусть для определенности F(a) 0. В качестве начального приближения корня примем с0 = (а + b)/2. Поскольку в рассматриваемом случае F(c0) 0 и F(b) > 0. Таким образом, с [с0, c1],а2=с0, b2 = с1. Аналогично находим другие приближения: с2=(с0+c1)/2и т.д. до выполнения условия (1.6).
[с0, c1],а2=с0, b2 = с1. Аналогично находим другие приближения: с2=(с0+c1)/2и т.д. до выполнения условия (1.6).

Рис. 1.1. Метод деления отрезка пополам
В отличие от большинства других итерационных методов метод деления отрезка пополам всегда сходится, причем можно гарантировать, что полученное решение будет иметь любую наперед заданную точность (разумеется, в рамках разрядности компьютера). При применении этого метода нет необходимости приближенно определять момент достижения требуемой точности, пользуясь, например, условиями близости двух последовательных приближений (2.22) или (2.23) (записанными для скалярного случая). Вместо них применяется соотношение (1.6), гарантирующее выполнение (1.4).
Однако метод деления отрезка пополам довольно медленный. Вычислим число итераций N, требуемое для достижения точности ε. Для этого выясним, пользуясь (1.3), для каких kвыполнено условие (1.6), и возьмем в качестве N наименьшее из таких k. Окончательно получим
 (1.7)
(1.7)
где Е(х) – целая часть числа х. Обычно для метода деления отрезка пополам N больше, чем для некоторых других методов, что не является препятствием к применению этого метода, если каждое вычисление значения функции F(x) несложно.
Итерационный процесс можно завершать и тогда, когда значение функции F(x) после k-й итерации станет меньшим по модулю ε, т.е.
 (1.8)
(1.8)
Такое условие окончания итераций аналогично условию (2.24). Действительно, для уравнения (1.1) величина F(ck)есть невязка(см. разд. 2.2.2),полученная на k—йитерации.
На рис. 1.2 представлен алгоритм итерационного процесса нахождения корня уравнения (1.1) методом деления отрезка пополам. Здесь сужение отрезка осуществляется заменой границ а или bна текущее значение корня с. При этом значение F(a) вычисляют лишь один раз, поскольку нам нужен только знак функции F(x) на левой границе, а он в процессе итераций не меняется.

Рис. 1.2. Алгоритм метода деления отрезка пополам
- Метод половинного деления (метод дихотомии или метод бисекции)
- Численные методы решения систем нелинейных уравнений
- Введение
- Возможности решателя scipy.optimize.root для численного решения систем алгебраических нелинейных уравнений
- Методы решения систем нелинейных уравнений
- Выбор модельной функции
- Программа для тестирования на модельной функции c результатами решения системы алгебраических нелинейных уравнений с помощью библиотечной функции optimize.root для разных методов отыскания корней
- Программа для тестирования на модельной функции c результатами решения системы алгебраических нелинейных уравнений с помощью программы написанной на Python 3 с учётом соотношений (1)-(8) для отыскания корней по модифицированному методу Ньютона
- 🎦 Видео
Видео:Метод простых итераций пример решения нелинейных уравненийСкачать

Метод половинного деления (метод дихотомии или метод бисекции)
Теорема 2. Итерационный процесс половинного деления сходится к искомому корню ξ с любой наперед заданной точностью ε.
Доказательство: Рассмотрим последовательность чисел ξi являющихся приближением корня на i -ом шаге.
ξi=½(bi+ai), i=0,1.
где a0=a; b0=b; ai;bi — границы подынтервалов, в которых f(ai)f(bi) 0 мы ни задали, всегда можно найти такое n , что  ч.т.д.
ч.т.д.
Графически метод дихотомии выглядит следующим образом
|f(c)|≤δ f(a)f(c) 10 = 1024 ≈ 10 3 раз. За 20 итераций (n=2) уменьшается в 2 20 ≈ 10 6 раз.
Пример №1 . Найти экстремум функции: y=5x 2 -4x+1 методом дихотомии, если ε=0.1, а исходный интервал [0,10].
- Решение
- Видео решение
Пример №3 . Методом бисекции найти решение нелинейного уравнения на отрезке [a,b] с точностью ε = 10 -2 . Выбрав полученное решение в качестве начального приближения, найти решение уравнения методом простой итерации с точностью ε = 10 -4 . Для метода простой итерации обосновать сходимость и оценить достаточное для достижения заданной точности число итераций.
sqrt(t)+x 2 = 10, a = 2.6, b = 3
Найдем корни уравнения: 
Используем для этого Метод половинного деления (метод дихотомии)..
Считаем, что отделение корней произведено и на интервале [a,b] расположен один корень, который необходимо уточнить с погрешностью ε.
Итак, имеем f(a)f(b) 1 /2(a+b) и вычисляем f(c). Проверяем следующие условия:
1. Если |f(c)| 1 /2 n (b-a)
В качестве корня ξ. возьмем 1 /2(an+bn). Тогда погрешность определения корня будет равна (bn – an)/2. Если выполняется условие:
(bn – an)/2 1 /2(an+bn).
Решение.
Поскольку F(2.6)*F(3) 0, то a=2.8
Итерация 2.
Находим середину отрезка: c = (2.8 + 3)/2 = 2.9
F(x) = 0.113
F(c) = -0.487
Поскольку F(c)•F(x) 0, то a=2.825
Остальные расчеты сведем в таблицу.
| N | c | a | b | f(c) | f(x) |
| 1 | 2.6 | 3 | 2.8 | -1.6275 | -0.4867 |
| 2 | 2.8 | 3 | 2.9 | -0.4867 | 0.1129 |
| 3 | 2.8 | 2.9 | 2.85 | 0.1129 | -0.1893 |
| 4 | 2.8 | 2.85 | 2.825 | -0.1893 | -0.3386 |
| 5 | 2.825 | 2.85 | 2.8375 | -0.3386 | -0.2641 |
| 6 | 2.8375 | 2.85 | 2.8438 | -0.2641 | -0.2267 |
Ответ: x = 2.8438; F(x) = -0.2267
Решение было получено и оформлено с помощью сервиса Метод Ньютона онлайн
Пример №2 . Локализовать корень нелинейного уравнения f(x) = 0 и найти его методом бисекции с точностью ε1 = 0,01. Выбрав полученное решение в качестве начального приближения, найти решение уравнения методом простой итерации с точностью ε2 = 0,0001. Для метода простой итерации обосновать сходимость и оценить достаточное для достижения заданной точности ε2 число итераций.
Видео:Способы решения систем нелинейных уравнений. 9 класс.Скачать
Численные методы решения систем нелинейных уравнений
Введение
Многие прикладные задачи приводят к необходимости нахождения общего решения системы нелинейных уравнений. Общего аналитического решения системы нелинейных уравнений не найдено. Существуют лишь численные методы.
Следует отметить интересный факт о том, что любая система уравнений над действительными числами может быть представлена одним равносильным уравнением, если взять все уравнения в форме  , возвести их в квадрат и сложить.
, возвести их в квадрат и сложить.
Для численного решения применяются итерационные методы последовательных приближений (простой итерации) и метод Ньютона в различных модификациях. Итерационные процессы естественным образом обобщаются на случай системы нелинейных уравнений вида:
 (1)
(1)
Обозначим через  вектор неизвестных и определим вектор-функцию
вектор неизвестных и определим вектор-функцию  Тогда система (1) записывается в виде уравнения:
Тогда система (1) записывается в виде уравнения:
 (2)
(2)
Теперь вернёмся к всеми любимому Python и отметим его первенство среди языков программирования, которые хотят изучать [1].
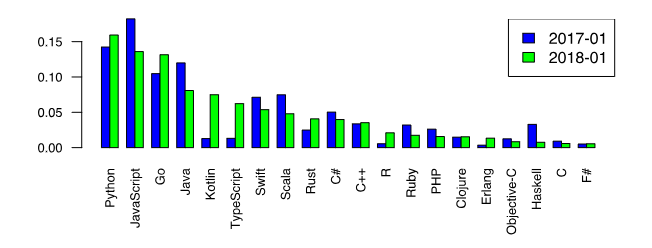
Этот факт является дополнительным стимулом рассмотрения числительных методов именно на Python. Однако, среди любителей Python бытует мнение, что специальные библиотечные функции, такие как scipy.optimize.root, spsolve_trianular, newton_krylov, являются самым лучшим выбором для решения задач численными методами.
С этим трудно не согласится хотя бы потому, что в том числе и разнообразие модулей подняло Python на вершину популярности. Однако, существуют случаи, когда даже при поверхностном рассмотрении использование прямых известных методов без применения специальных функций библиотеки SciPy тоже дают неплохие результаты. Иными словами, новое- это хорошо забытое старое.
Так, в публикации [2], на основании проведенных вычислительных экспериментов, доказано, что библиотечная функция newton_krylov, предназначенная для решения больших систем нелинейных уравнений, имеет в два раза меньшее быстродействие, чем алгоритм TSLS+WD
(two-step least squares), реализованный средствами библиотеки NumPy.
Целью настоящей публикации является сравнение по числу итераций, быстродействию, а главное, по результату решения модельной задачи в виде системы из ста нелинейных алгебраических уравнений при помощи библиотечной функции scipy.optimize.root и методом Ньютона, реализованного средствами библиотеки NumPy.
Возможности решателя scipy.optimize.root для численного решения систем алгебраических нелинейных уравнений
Библиотечная функция scipy.optimize.root выбрана в качестве базы сравнения, потому что имеет обширную библиотеку методов, пригодных для сравнительного анализа.
scipy.optimize.root(fun, x0, args=(), method=’hybr’, jac=None, tol=None,callback=None, ptions=None)
fun — Векторная функция для поиска корня.
x0 –Начальные условия поиска корней
method:
hybr -используется модификация Пауэлл гибридный метод;
lm – решает системы нелинейных уравнений методом наименьших квадратов.
Как следует из документации [3] методы broyden1, broyden2, anderson, linearmixing, diagbroyden, excitingmixing, krylov являются точными методами Ньютона. Остальные параметры являются «не обязательными» и с ними можно ознакомится в документации.
Методы решения систем нелинейных уравнений
Приведенный далее материал действительно можно прочитать в литературе, например в [4], но я уважаю своего читателя и для его удобства приведу вывод метода по возможности в сокращенном виде. Те, кто не любит формулы, этот раздел пропускают.
В методе Ньютона новое приближение для решения системы уравнений (2) определяется из решения системы линейных уравнений:
 (3)
(3)
Определим матрицу Якоби:
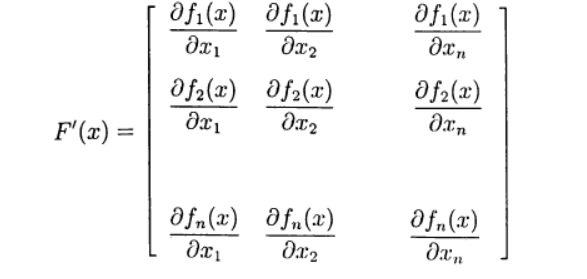 (4)
(4)
Запишем(3) в виде:
 (5)
(5)
Многие одношаговые методы для приближенного решения (2) по аналогии с двухслойными итерационными методами для решения систем линейных алгебраических уравнений можно записать в виде:
 (6)
(6)
где  — итерационные параметры, a
— итерационные параметры, a  — квадратная матрица n х n, имеющая обратную.
— квадратная матрица n х n, имеющая обратную.
При использовании записи (6) метод Ньютона (5) соответствует выбору:

Система линейных уравнений (5) для нахождения нового приближения  может решаться итерационно. В этом случае мы имеем двухступенчатый итерационный процесс с внешними и внутренними итерациями. Например, внешний итерационный процесс может осуществляться по методу Ньютона, а внутренние итерации — на основе итерационного метода Зейделя
может решаться итерационно. В этом случае мы имеем двухступенчатый итерационный процесс с внешними и внутренними итерациями. Например, внешний итерационный процесс может осуществляться по методу Ньютона, а внутренние итерации — на основе итерационного метода Зейделя
При решении систем нелинейных уравнений можно использовать прямые аналоги стандартных итерационных методов, которые применяются для решения систем линейных уравнений. Нелинейный метод Зейделя применительно к решению (2) дает:
 (7)
(7)
В этом случае каждую компоненту нового приближения из решения нелинейного уравнения, можно получить на основе метода простой итерации и метода Ньютона в различных модификациях. Тем самым снова приходим к двухступенчатому итерационному методу, в котором внешние итерации проводятся в соответствии с методом Зейделя, а внутренние — с методом Ньютона.
Основные вычислительные сложности применения метода Ньютона для приближенного решения систем нелинейных уравнений связаны с необходимостью решения линейной системы уравнений с матрицей Якоби на каждой итерации, причем от итерации к итерации эта матрица меняется. В модифицированном методе Ньютона матрица Якоби обращается только один раз:
 (8)
(8)
Выбор модельной функции
Такой выбор не является простой задачей, поскольку при увеличении числа уравнений в системе в соответствии с ростом числа переменных результат решения не должен меняться, поскольку в противном случае невозможно отследить правильность решения системы уравнений при сравнении двух методов. Привожу следующее решение для модельной функции:
Функция f создаёт систему из n нелинейных уравнений, решение которой не зависит от числа уравнений и для каждой из n переменных равно единице.
Программа для тестирования на модельной функции c результатами решения системы алгебраических нелинейных уравнений с помощью библиотечной функции optimize.root для разных методов отыскания корней
Только один из методов, приведенных в документации [3] прошёл тестирование по результату решения модельной функции, это метод ‘krylov’.
Решение для n=100:
Solution:
[1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1.]
Krylov method iteration = 4219
Optimize root time 7.239 seconds:
Вывод: С увеличением числа уравнений вдвое заметно появление ошибок в решении. При дальнейшем увеличении n решение становится не приемлемым, что возможно из-за автоматической адаптации к шагу, эта же причина резкого падения быстродействия. Но это только моё предположение.
Программа для тестирования на модельной функции c результатами решения системы алгебраических нелинейных уравнений с помощью программы написанной на Python 3 с учётом соотношений (1)-(8) для отыскания корней по модифицированному методу Ньютона
Решение для n=100:
Solution:
[1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1.]
Newton iteration = 13
Newton method time 0.496 seconds
Решение для n=200:
Solution:
[1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1.]
Newton iteration = 14
Newton method time 1.869 seconds
Чтобы убедиться в том, что программа действительно решает систему, перепишем модельную функцию для ухода от корня со значением 1 в виде:
Получим:
Solution:
[ 0.96472166 0.87777036 0.48175823 -0.26190496 -0.63693762 0.49232062
-1.31649896 0.6865098 0.89609091 0.98509235]
Newton iteration = 16
Newton method time 0.046 seconds
Вывод: Программа работает и при изменении модельной функции.
Теперь вернёмся к начальной модельной функции и проверим более широкий диапазон для n, например в 2 и 500.
n=2
Solution:
[1. 1.]
Newton iteration = 6
Newton method time 0.048 seconds
n=500
🎦 Видео
Метод Ньютона (метод касательных) Пример РешенияСкачать

МЗЭ 2021 Лекция 11 Метод Ньютона для решения систем нелинейных уравненийСкачать

4.2 Решение систем нелинейных уравнений. МетодыСкачать

Способы решения систем нелинейных уравнений. Практическая часть. 9 класс.Скачать

Метод половинного деления решение нелинейного уравненияСкачать

Методы численного анализа - Метод Ньютона, секущих для решения систем нелинейных уравненийСкачать

Способы решения систем нелинейных уравнений. Практическая часть. 9 класс.Скачать

10 Численные методы решения нелинейных уравненийСкачать

Решение системы линейных уравнений с двумя переменными способом сложения. 6 класс.Скачать

Алгоритмы С#. Метод Ньютона для решения систем уравненийСкачать

Способы решения систем нелинейных уравнений. Практическая часть. 9 класс.Скачать

Матричный метод решения систем уравненийСкачать
14 Метод половинного деления Ручной счет Численные методы решения нелинейного уравненияСкачать

Методы решения систем нелинейных уравнений. Метод Ньютона. Численные методы. Лекция 14Скачать

8 Метод простой итерации Ручной счет Решение системы линейных уравнений СЛАУСкачать

Метод математической индукции. 9 класс.Скачать

После этого видео, ТЫ РЕШИШЬ ЛЮБУЮ Систему Нелинейных УравненийСкачать

1,2 Решение нелинейных уравнений методом хордСкачать
