Назначение сервиса . Онлайн-калькулятор предназначен для перехода ЗЛП к КЗЛП. Приведение задачи к канонической форме означает, что все ограничения будут иметь вид равенств, путем ввода дополнительных переменных.
Если на какую-либо переменную xj не наложено ограничение, то она заменяется на разность дополнительных переменных, xj = xj1 — xj2, xj1 ≥ 0, xj2 ≥ 0.
- Шаг №1
- Шаг №2
- Видеоинструкция
Математическая модель ЗЛП называется основной, если ограничения в ней представлены в виде уравнений при условии неотрицательности переменных.
Математическая модель называется канонической, если ее система ограничений представлена в виде системы m линейно независимых уравнений (ранг системы r=m), в системе выделен единичный базис, определены свободные переменные и целевая функция выражена через свободные переменные. При этом правые части уравнений неотрицательны (bi ≥ 0).
Переменные, входящие в одно из уравнений системы с коэффициентом один и отсутствующие в других уравнениях называются базисными неизвестными, а все другие – свободными.
Решение системы называется базисным, если в нем свободные переменные равны 0, и оно имеет вид:
Xбаз = (0, 0; b1, …, bm), f(Xбаз) = c0
Базисное решение является угловой точкой множества решений системы, т.е. определяет вершину многоугольника решений модели. Среди таких решений находится и то, при котором целевая функция принимает оптимальное значение.
Базисное решение называется опорным, если оно допустимо, т.е. все правые части уравнений системы (или неравенств) положительны bi ≥ 0.
Компактная форма канонической модели имеет вид:
AX = b
X ≥ 0
Z = CX(max)
Понятие допустимого решения, области допустимых решений, оптимального решения задачи линейного программирования.
Определение 1 . Вектор X, удовлетворяющий системе ограничений ЗЛП, в том числе и условиям неотрицательности, если они имеются, называется допустимым решением ЗЛП.
Определение 2 . Совокупность всех допустимых решений образует область допустимых решений (ОДР) ЗЛП.
Определение 3 . Допустимое решение, для которого целевая функция достигает максимума (или минимума), называется оптимальным решением.
В каждой задаче ЛП ищутся значения переменных при условии, чтобы:
- эти значения удовлетворяли некоторой системе линейных уравнений или неравенств;
- при этих значениях целевая функция обращалась бы в минимум или максимум.
Одним из универсальных методов ЛП является симплексный метод, который, однако, можно применять, если задача ЛП имеет каноническую форму.
Определение. Задача ЛП имеет каноническую форму, если все ограничения системы состоят только из уравнений (кроме неравенств, выражающих неотрицательность переменных) и целевую функцию необходимо минимизировать.
Примером такой задачи ЛП в канонической форме является задача 1 – сбалансированная транспортная задача с системой ограничений (1) и целевой функцией (2).
Однако в большинстве экономических задач чаще всего в систему ограничений первоначально входят не только уравнения, а и неравенства.
Утверждение. Любая общая задача ЛП может быть приведена к канонической форме.
Приведение общей задачи ЛП к канонической форме достигается путем введения новых (их называют дополнительными) переменных.
Система ограничений (3) этой задачи состоит из четырех неравенств. Введя дополнительные переменные y1≥ 0, y2≥ 0, y3≥ 0, y4 ≥ 0, можно перейти к системе ограничений: 
Эти дополнительные переменные y i имеют абсолютно ясный экономический смысл, а именно означают величину неиспользованного времени работы (простоя машины i-го вида).
Например, если бы машины первого вида работали все 18 ч, то x + y = 18, следовательно, y 1 = 0. Но мы допускаем возможность неполного использования времени работы первой машины x + y y = 6, мы можем из системы ограничений (3.9) сделать вывод, что y1 = y2 = y3 = 0, а y4 = 12 – 6 = 6. Т. е. машины первого, второго, третьего вида используют свое рабочее время полностью. А вот четвертая машина загружена лишь наполовину, 6 часов, и при заданном оптимальном плане простаивает. Возможно, после таких выводов руководителю предприятия захочется загрузить ее другой работой, сдать в аренду на это время и т.д.
Итак, введением дополнительных переменных мы можем любое ограничение типа неравенства привести к уравнению.
Рассмотрим задачу о смеси. Система ограничений имеет вид:
Неравенства были обращены в сторону «больше», поэтому вводя дополнительные переменные y 1, y 2, y 3≥ 0, их необходимо вычесть из левой части, чтобы уравнять ее с правой. Получим систему ограничений в канонической форме:
Переменные yi также будут иметь экономический смысл. Если вы вспомните практическое содержание задачи, то переменная y 1 будет означать количество излишнего вещества А в смеси, y 2 –количество излишков вещества В в смеси, y3 – излишки С в смеси.
Задача нахождения максимального значения целевой функции может быть сведена к нахождению минимума для функции –F ввиду очевидности утверждения max F = –min (– F ). Посмотрите на рисунок: если в какой-то точке x= x0 функция y= F(x) достигает своего максимума, то функция y= –F(x), симметричная ей относительно оси OX, в этой же точке x0 достигнет минимума, причем Fmax = – (–Fmin) при x = x0.
Вывод. Для представления задачи ЛП в канонической форме необходимо:
- неравенства, входящие в систему ограничений задачи, преобразовать в уравнения с помощью введения дополнительных переменных;
- если целевая функция F→max (максимизируется), она заменяется на функцию –F→ min (которая минимизируется).
Пример №1 . Следующую задачу ЛП привести к каноническому виду: F(X) = 5x1 + 3x2 → max при ограничениях:
2x1 + 3x2≤20
3x1 + x2≤15
4x1≤16
3x2≤12
Модель записана в стандартной форме. Введем балансовые неотрицательные переменные x3, x4, x5, x6, которые прибавим к левым частям ограничений-неравенств. В целевую функцию все дополнительные переменные введем с коэффициентами, равными нулю:
В первом неравенстве смысла (≤) вводим базисную переменную x3. Во 2-ом неравенстве смысла (≤) вводим базисную переменную x4. В третьем неравенстве вводим базисную переменную x5. В 4-м неравенстве — базисную переменную x6. Получим каноническую форму модели:
2x1 + 3x2 + 1x3 + 0x4 + 0x5 + 0x6 = 20
3x1 + 1x2 + 0x3 + 1x4 + 0x5 + 0x6 = 15
4x1 + 0x2 + 0x3 + 0x4 + 1x5 + 0x6 = 16
0x1 + 3x2 + 0x3 + 0x4 + 0x5 + 1x6 = 12
F(X) = 5x1 + 3x2 + 0x3 + 0x4 + 0x5 + 0x6 → max
Для приведения ЗЛП к канонической форме необходимо:
1. Поменять знак у целевой функции
— F = -2x1 + x2 — 4x3 +2x4 → max
4. Соответствующая целевая функция примет вид:
— F = -2x1 + x2 — 4(x8 – x9) +2(x10 – x11) → max
Пример №2 . Преобразовать следующие задачи ЛП к канонической форме и решить их симплекс-методом.
- Линейное программирование — основные понятия с примерами решения
- Задача линейного программирования
- Приведение общей задачи линейного программирования к канонической форме
- Множества допустимых решений
- Опорное решение задачи линейного программирования, его взаимосвязь с угловыми точками
- Симплекс-метод с естественным базисом
- Симплексный метод с искусственным базисом (М-метод)
- Теория двойственности
- Канонический вид уравнения линейного программирования
Линейное программирование — основные понятия с примерами решения
Содержание:
Исследование различных процессов, в том числе и экономических, обычно начинается с их моделирования, т.е. отражения реального процесса через математические соотношения. При этом составляются уравнения или неравенства, которые связывают различные показатели (переменные) исследуемого процесса, образуя систему ограничений. В этих процессах выделяются такие переменные, меняя которые можно получить оптимальное значение основного показателя данной системы (прибыль, доход, затраты и т.д.). Соответствующие методы, позволяющие решать указанные задачи, объединяются под общим названием «математическое программирование» или математические методы исследования операций.
Математическое программирование включает в себя такие разделы математики, как линейное, нелинейное и динамическое программирование. Сюда же относят и стохастическое программирование, теорию игр, теорию массового обслуживания, теорию управления запасами и некоторые другие.
Математическое программирование — это раздел высшей математики, посвященный решению задач, связанных с нахождением экстремумов функций нескольких переменных, при наличии ограничений на переменные.
Методами математического программирования решаются задачи о распределении ресурсов, планировании выпуска продукции, ценообразования, транспортные задачи и т.д.
Построение математической модели экономической задачи включает следующие этапы:
- выбор переменных задачи;
- составление системы ограничений;
- выбор целевой функции.
Переменными задачи называются величины 
Система ограничений включает в себя систему уравнений и неравенств, которым удовлетворяют переменные задачи и которые следуют из ограниченности ресурсов или других экономических или физических условий, например, положительности переменных и т.п.
Целевой функцией называют функцию переменных задачи, которая характеризует качество выполнения задачи, и экстремум которой требуется найти.
Общая задача математического программирования формулируется следующим образом: найти экстремум целевой функции:  и соответствующие ему переменные при условии, что эти переменные удовлетворяют системе ограничений:
и соответствующие ему переменные при условии, что эти переменные удовлетворяют системе ограничений:

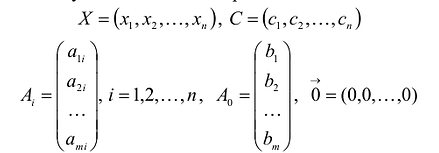
Если целевая функция и система ограничений линейны, то задача математического программирования называется задачей линейного программирования и в общем виде может быть записана следующим образом:

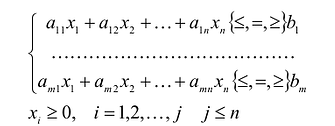
Данная запись означает следующее: найти экстремум целевой функции задачи и соответствующие ему переменные X = ( ). при условии, что эти переменные удовлетворяют системе ограничений и условиям неотрицательности.
). при условии, что эти переменные удовлетворяют системе ограничений и условиям неотрицательности.
Допустимым решением (планом) задачи линейного программирования называется любойX = (). удовлетворяющий системе ограничений и условиям неотрицательности. Множество допустимых решений (планов) задачи образует область допустимых решений.
Оптимальным решением (планом) задачи линейного программирования называется такое допустимое решение задачи, при котором целевая функция достигает экстремума.
Задача линейного программирования
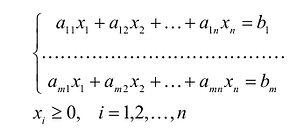
В общем случае задача линейного программирования записывается так, что ограничениями являются как уравнения, так и неравенства, а переменные могут быть как неотрицательными, так и произвольно изменяющимися. В случае, когда все ограничения являются уравнениями и все переменные удовлетворяют условию неотрицательности, задачу линейного программирования называют канонической. Каноническая задача линейного программирования в координатной форме записи имеет вид:

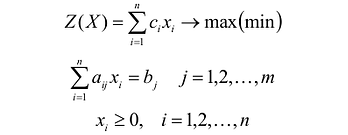
Используя знак суммирования эту задачу можно записать следующим образом:
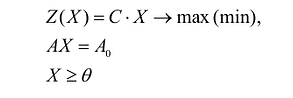
Каноническая задача линейного программирования в векторной форме имеет вид:
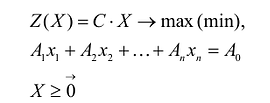
В данном случае введены векторы:
Здесь С — X — скалярное произведение векторов С и X.
Каноническая задача линейного программирования в матричной форме записи имеет вид:
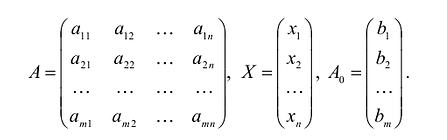
Здесь А — матрица коэффициентов системы уравнений, X -матрица-столбец переменных задачи;  — матрица-столбец правых частей системы ограничений.
— матрица-столбец правых частей системы ограничений.
Нередко используются задачи линейного программирования, называемые симметричными, которые в матричной форме записи имеют вид:

Приведение общей задачи линейного программирования к канонической форме
В большинстве методов решения задач линейного программирования предполагается, что система ограничений состоит из уравнений и естественных условий неотрицательности переменных. Однако, при составлении математических моделей экономических задач ограничения в основном формулируются системы неравенств, поэтому возникает необходимость перехода от системы неравенств к системе уравнений. Это может быть сделано следующим образом. К левой части линейного неравенства:
 прибавляется величина
прибавляется величина  такая, что переводит неравенство в равенство
такая, что переводит неравенство в равенство  , где:
, где: 
Неотрицательная переменная  называется дополнительной переменной.
называется дополнительной переменной.
Основания для возможности такого преобразования дает следующая теорема.
Теорема. Каждому решению  неравенства
неравенства  соответствует единственное решение
соответствует единственное решение  уравнения:
уравнения:  и неравенства
и неравенства  и, наоборот, каждому решению
и, наоборот, каждому решению  уравнения:
уравнения: и неравенства соответствует единственное решение
и неравенства соответствует единственное решение  неравенства:
неравенства: 
Доказательство. Пусть — решение неравенства. Тогда:
Если в уравнение вместо переменных подставить значения , получится:

Таким образом, решение удовлетворяет уравнению:  и неравенству .
и неравенству .
Доказана первая часть теоремы.
Пусть удовлетворяет уравнению  и неравенству , т.е.
и неравенству , т.е.  . Отбрасывая в левой части равенства неотрицательную величину
. Отбрасывая в левой части равенства неотрицательную величину  , получим:
, получим:
т.е. удовлетворяет неравенству:  что и требовалось доказать.
что и требовалось доказать.
Если в левую часть неравенств системы ограничений вида 
добавить переменную  , то получится система ограничений — уравнений
, то получится система ограничений — уравнений 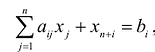
 В случае, если система неравенств-ограничений имеет вид
В случае, если система неравенств-ограничений имеет вид  , то из левой части неравенств-ограничений нужно вычесть соответствующую неотрицательную дополнительную переменную
, то из левой части неравенств-ограничений нужно вычесть соответствующую неотрицательную дополнительную переменную 
Полученная таким образом система уравнений-ограничений, вместе с условиями неотрицательности переменных, т.е. 
 и целевой функцией является канонической формой записи задачи линейного программирования.
и целевой функцией является канонической формой записи задачи линейного программирования.
Дополнительные переменные вводятся в целевую функцию с нулевыми коэффициентами и поэтому не влияют на ее значения.
В реальных практических задачах дополнительные неизвестные имеют определенный смысл. Например, если левая часть ограничений задачи отражает расход ресурсов на производство продукции в объемах  , а правые части — наличие производственных ресурсов, то числовые значения дополнительных неизвестных
, а правые части — наличие производственных ресурсов, то числовые значения дополнительных неизвестных  и означают объем неиспользованных ресурсов i-го вида.
и означают объем неиспользованных ресурсов i-го вида.
Иногда возникает также необходимость перейти в задаче от нахождения минимума к нахождению максимума или наоборот. Для этого достаточно изменить знаки всех коэффициентов целевой функции на противоположные, а в остальном задачу оставить без изменения. Оптимальные решения полученных таким образом задач на максимум и минимум совпадают, а значения целевых функций при оптимальных решениях отличаются только знаком.
Множества допустимых решений
Множество точек называется выпуклым, если оно вместе с любыми двумя своими точками содержит их произвольную выпуклую линейную комбинацию.
Выпуклой линейной комбинацией произвольных точек  Евклидова пространства
Евклидова пространства  называется сумма
называется сумма  — произвольные неотрицательные числа, сумма которых равна 1.
— произвольные неотрицательные числа, сумма которых равна 1.
Геометрически это означает, что если множеству с любыми двумя его произвольными точками полностью принадлежит и отрезок, соединяющий эти точки, то оно будет выпуклым. Например, выпуклыми множествами являются прямолинейный отрезок, прямая, круг, шар, куб, полуплоскость, полупространство и др.
Точка множества называется граничной, если любая окрестность этой точки сколь угодно малого размера содержит точки, как принадлежащие множеству, так и не принадлежащие ему.
Граничные точки множества образуют его границу. Множество называется замкнутым, если оно содержит все свои граничные точки.
Ограниченным называется множество, если существует шар с радиусом конечной длины и центром в любой точке множества, содержащий полностью в себе данное множество. В противном случае множество будет неограниченным.
Пересечение двух или более выпуклых множеств будет выпуклым множеством, так как оно отвечает определению выпуклого множества.
Точка выпуклого множества называется угловой, если она не может быть представлена в виде выпуклой линейной комбинации двух других различных точек этого множества.
Так, угловые точки треугольника — его вершины, круга — точки окружности, ее ограничивающие, а прямая, полуплоскость, плоскость, полупространство, пространство не имеют угловых точек.
Выпуклое замкнутое ограниченное множество на плоскости, имеющее конечное число угловых точек, называется выпуклым многоугольником, а замкнутое выпуклое ограниченное множество в трехмерном пространстве, имеющее конечное число угловых точек, называется выпуклым многогранником.
Теорема. Любая тонка многоугольника является выпуклой линейной комбинацией его угловых точек.
Теорема. Область допустимых решений задачи линейного программирования является выпуклым множеством.
Уравнение целевой функции при фиксированных значениях самой функции является уравнением прямой линии (плоскости, гиперплоскости и т.д.). Прямая, уравнение которой получено из целевой функции при равенстве ее постоянной величине, называется линией уровня.
Линия уровня, имеющая общие точки с областью допустимых решений и расположенная так, что область допустимых решений находится целиком в одной из полуплоскостей, называется опорной прямой.
Теорема. Значения целевой функции в точках линии уровня увеличиваются, если линию уровня перемещать параллельно начальному положению в направлении нормали и убывают при перемещении в противоположном направлении.
Теорема. Целевая функция задачи линейного программирования достигает экстремума в угловой точке области допустимых решений; причем, если целевая функция достигает экстремума в нескольких угловых точках области допустимых решений, она также достигает экстремума в любой выпуклой комбинации этих точек.
Опорное решение задачи линейного программирования, его взаимосвязь с угловыми точками
Каноническая задача линейного программирования в векторной форме имеет вид:
Положительным координатам допустимых решений ставятся в соответствие векторы условий. Эти системы векторов зависимы, так как число входящих в них векторов больше размерности векторов.
Базисным решением системы называется частное решение, в котором неосновные переменные имеют нулевые значения. Любая система уравнений имеет конечное число базисных решений, равное  , где n — число неизвестных, r- ранг системы векторов условий. Базисные решения, координаты которых удовлетворяют условию неотрицательности, являются опорными.
, где n — число неизвестных, r- ранг системы векторов условий. Базисные решения, координаты которых удовлетворяют условию неотрицательности, являются опорными.
Опорным решением задачи линейного программирования называется такое допустимое решение  , для которого векторы условий, соответствующие положительным координатам
, для которого векторы условий, соответствующие положительным координатам  линейно независимы.
линейно независимы.
Число отличных от нуля координат опорного решения не может превосходить ранга r системы векторов условий (т.е. числа линейно независимых уравнений системы ограничений).
Если число отличных от нуля координат опорного решения равно m, то такое решение называется невырожденным, в противном случае, если число отличных от нуля координат опорного решения меньше т, такое решение называется вырожденным.
Базисом опорного решения называется базис системы векторов условий задачи, в состав которой входят векторы, соответствующие отличным от нуля координатам опорного решения.
Теорема. Любое опорное решение является угловой точкой области допустимых решений.
Теорема. Любая угловая точка области допустимых решений является опорным решением.
Пример:
Графический метод решения задачи линейной оптимизации рассмотрим на примере задачи производственного планирования при n = 2.
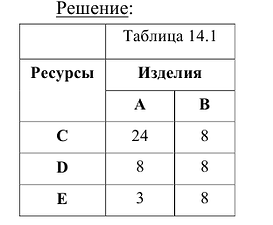
Предприятие изготавливает изделия двух видов А и В. Для производства изделий оно располагает сырьевыми ресурсами трех видов С, D и Е в объемах 600, 480 и 240 единиц соответственно. Нормы расхода ресурсов на единицу продукции каждого вида известны и представлены в табл. 14.1
Прибыль от реализации изделия А составляет 40 млн. руб., а изделия В — 50 млн.руб. Требуется найти объемы производства изделий А и В, обеспечивающие максимальную прибыль.
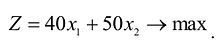
Построим математическую модель задачи, для чего обозначим  — объемы производства изделий А и В соответственно.
— объемы производства изделий А и В соответственно.
Тогда прибыль предприятия от реализации  изделий А и
изделий А и  изделий В составит:
изделий В составит:
Ограничения по ресурсам будут иметь вид:
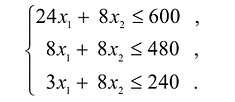
Естественно, объемы производства должны быть неотрицательными 
Решение сформулированной задами найдем, используя геометрическую интерпретацию. Определим сначала многоугольник решений, для чего систему ограничений неравенств запишем в виде уравнений и пронумеруем их:
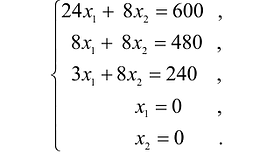
Каждое из записанных уравнений представляет собой прямую на плоскости, причем 4-я и 5-я прямые являются координатными осями.
Чтобы построить первую прямую, найдем точки ее пересечения с осями координат:  а при
а при  .
.
Далее нас интересует, по какую сторону от прямой будет находиться полуплоскость, соответствующая первому неравенству. Чтобы определить искомую полуплоскость, возьмем точку O(0,0) подставив ее координаты в неравенство, видим, что оно удовлетворяется. Так как точка O(0,0) лежит левее первой прямой, то и полуплоскость будет находиться левее прямой
 . На рис 14 , расположение полуплоскости относительно первой прямой отмечено стрелками.
. На рис 14 , расположение полуплоскости относительно первой прямой отмечено стрелками.
Аналогично построены 2-я и 3-я прямые и найдены полуплоскости, соответствующие 2-му и 3-му неравенству. Точки, удовлетворяющие ограничениям  , находятся в первом квадранте. Множество точек, удовлетворяющих всем ограничениям одновременно, является ОДР системы ограничений. Такой областью на графике (рис. 14.1) является многоугольник ОАВС.
, находятся в первом квадранте. Множество точек, удовлетворяющих всем ограничениям одновременно, является ОДР системы ограничений. Такой областью на графике (рис. 14.1) является многоугольник ОАВС.
Любая точка многоугольника решений удовлетворяет системе ограничений задачи и, следовательно, является ее решением. Это говорит о том, что эта задача линейной оптимизации имеет множество допустимых решений, т.е. моговариантпа. Нам же необходимо найти решение, обеспечивающее максимальную прибыль.
Чтобы найти эту точку, приравняем функцию к нулю и построим соответствующую ей прямую. Вектор-градиент прямой функции
 имеет координаты
имеет координаты 
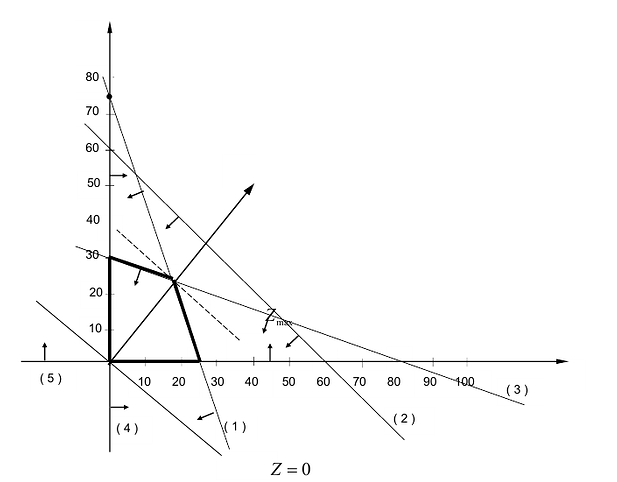
Изобразим вектор на графике и построим прямую функции перпендикулярно вектору на рис. 14.1. Перемещая прямую функции параллельно самой себе в направлении вектора, видим, что последней точкой многоугольника решений, которую пересечет прямая функции, является угловая точка В. Следовательно, в точке В функция достигает максимального значения. Координаты точки В находим, решая систему уравнений, прямые которых пересекаются в данной точке.
Решив эту систему, получаем, что 
Следовательно, если предприятие изготовит изделия в найденных объемах, то получит максимальную прибыль, равную:

Алгоритм решения задачи линейного программирования графическим методом таков:
- Строится область допустимых решений;
- Строится вектор нормали к линии уровня с точкой приложении в начале координат;
- Перпендикулярно вектору нормали проводится одна из линий уровня, проходящая через начало координат;
- Линия уровня перемещается до положения опорной прямой. На этой прямой и будут находиться максимум или минимум функции.
В зависимости от вида области допустимых решений и целевой функции задача может иметь единственное решение, бесконечное множество решений или не иметь ни одного оптимального решения. 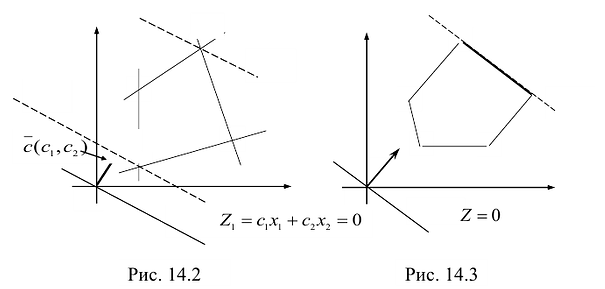
На рис. 14.3 показан случай, когда прямая функции параллельна отрезку АВ, принадлежащему ОДР. Максимум функции Z достигается в точке А и в точке В, а, следовательно, и в любой точке отрезка АВ, т.к. эти точки могут быть выражены в виде линейной комбинации угловых точек А и В.
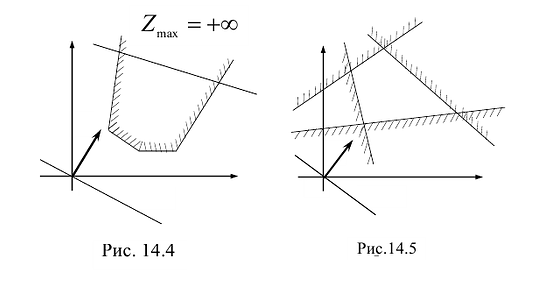
На рисунке 14.4 изображен случай, когда система ограничений образует неограниченное сверху множество. Функция Z в данном случае стремится к бесконечности, так как прямую функции можно передвигать в направлении вектора градиента как угодно далеко, а на рисунке 14.5 представлен случай несовместной системы ограничений.
Основные понятия симплексного метода решения задачи линейного программирования.
Среди универсальных методов решения задач линейного программирования наиболее распространен симплексный метод (или симплекс-метод), разработанный американским ученым Дж.Данцигом. Суть этого метода заключается в том, что вначале получают допустимый вариант, удовлетворяющий всем ограничениям, но необязательно оптимальный (так называемое начальное опорное решение); оптимальность достигается последовательным улучшением исходного варианта за определенное число этапов (итераций). Нахождение начального опорного решения и переход к следующему опорному решению проводятся на основе применения рассмотренного выше метода Жордана-Гаусса для системы линейных уравнений в канонической форме, в которой должна быть предварительно записана исходная задача линейного программирования; направление перехода от одного опорного решения к другому выбирается при этом на основе критерия оптимальности (целевой функции) исходной задачи.
Симплекс-метод основан на следующих свойствах задачи линейного программирования:
- Не существует локального экстремума, отличного от глобального. Другими словами, если экстремум есть, то он единственный.
- Множество всех планов задачи линейного программирования выпукло.
- Целевая функция ЗЛП достигает своего максимального (минимального) значения в угловой точке многогранника решений (в его вершине). Если целевая функция принимает свое оптимальное значение более чем в одной угловой точке, то она достигает того же значения в любой точке, являющейся выпуклой линейной комбинацией этих точек.
- Каждой угловой точке многогранника решений отвечает опорный план ЗЛП.
Рассмотрим две разновидности симплексного метода: симплекс-метод с естественным базисом и симплекс-метод с искусственным базисом (или М-метод).
Симплекс-метод с естественным базисом
Для применения этого метода задача линейного программирования должна быть сформулирована в канонической форме, причем матрица системы уравнений должна содержать единичную подматрицу размерностью mхm. В этом случае очевиден начальный опорный план (неотрицательное базисное решение).
Для определенности предположим, что первые m векторов матрицы системы составляют единичную матрицу. Тогда очевиден первоначальный опорный план: 
Проверка на оптимальность опорного плана проходит с помощью критерия оптимальности, переход к другому опорному плану — с помощью преобразований Жордана-Гаусса и с использованием критерия оптимальности.
Полученный опорный план снова проверяется на оптимальность и т.д. Процесс заканчивается за конечное число шагов, причем на последнем шаге либо выявляется неразрешимость задачи (конечного оптимума нет), либо получаются оптимальный опорный план и соответствующее ему оптимальное значение целевой функции.
Признак оптимальности заключается в следующих двух теоремах.
Теорема 1. Если для некоторого вектора, не входящего в базис, выполняется условие:

то можно получить новый опорный план, для которого значение целевой функции будет больше исходного; при этом могут быть два случая:
- если все координаты вектора, подлежащего вводу в базис, неположительны, то задача линейного программирования не имеет решения;
- если имеется хотя бы одна положительная координата у вектора, подлежащего вводу в базис, то можно получить новый опорный план.
Теорема 2. Если для всех векторов выполняется условие  то полученный план является оптимальным.
то полученный план является оптимальным.
На основании признака оптимальности в базис вводится вектор Ак, давший минимальную отрицательную величину симплекс-разности: 
Чтобы выполнялось условие неотрицательности значений опорного плана, выводится из базиса вектор  , который дает минимальное положительное отношение:
, который дает минимальное положительное отношение:

Строка  называется направляющей, столбец
называется направляющей, столбец  и элемент
и элемент  — направляющими (последний называют также разрешающим элементом).
— направляющими (последний называют также разрешающим элементом).
Элементы вводимой строки, соответствующей направляющей строке, в новой симплекс-таблице вычисляются по формулам:
а элементы любой другой i-й строки пересчитываются по формулам:

Значения базисных переменных нового опорного плана (показатели графы «план») рассчитываются по формулам:

Если наименьшее значение Q достигается для нескольких базисных векторов, то чтобы исключить возможность зацикливания (повторения базиса), можно применить следующий способ.
Вычисляются частные, полученные от деления всех элементов строк, давших одинаковое минимальное значение Q на свои направляющие элементы. Полученные частные сопоставляются по столбцам слева направо, при этом учитываются и нулевые, и отрицательные значения. В процессе просмотра отбрасываются строки, в которых имеются большие отношения, и из базиса выводится вектор, соответствующий строке, в которой раньше обнаружится меньшее частное.
Для использования приведенной выше процедуры симплекс -метода к минимизации линейной формы  следует искать максимум функции
следует искать максимум функции  затем полученный максимум взять с противоположным знаком. Это и будет искомый минимум исходной задачи линейного программирования.
затем полученный максимум взять с противоположным знаком. Это и будет искомый минимум исходной задачи линейного программирования.
Симплексный метод с искусственным базисом (М-метод)
Симплексный метод с искусственным базисом применяется в тех случаях, когда затруднительно найти первоначальный опорный план исходной задачи линейного программирования, записанной в канонической форме.
М-метод заключается в применении правил симплекс-метода к так называемой М-задаче. Она получается из исходной добавлением к левой части системы уравнений в канонической форме исходной задачи линейного программирования таких искусственных единичных векторов с соответствующими неотрицательными искусственными переменными, чтобы вновь полученная матрица содержала систему единичных линейно-независимых векторов. В линейную форму исходной задачи добавляется в случае её максимизации слагаемое, представляющее собой произведение числа (-М) на сумму искусственных переменных, где М — достаточно большое положительное число.
В полученной задаче первоначальный опорный план очевиден. При применении к этой задаче симплекс-метода оценки А, теперь будут зависеть от числа М. Для сравнения оценок нужно помнить, что М — достаточно большое положительное число, поэтому из базиса будут выводиться в первую очередь искусственные переменные.
В процессе решения M-задачи следует вычеркивать в симплекс-таблице искусственные векторы по мере их выхода из базиса. Если все искусственные векторы вышли из базиса, то получаем исходную задачу. Если оптимальное решение М-задачи содержит искусственные векторы или М-задача неразрешима, то исходная задача также неразрешима.
Путем преобразований число вводимых переменных, составляющих искусственный базис, может быть уменьшено до одной.
Теория двойственности
Любой задаче линейного программирования можно сопоставить сопряженную или двойственную ей задачу. Причем, совместное исследование этих задач дает, как правило, значительно больше информации, чем исследование каждой из них в отдельности.
Любую задачу линейного программирования можно записать в виде:
Первоначальная задача называется исходной или прямой.
Модель двойственной задачи имеет вид:
Переменные двойственной задачи  называют объективно обусловленными оценками или двойственными оценками.
называют объективно обусловленными оценками или двойственными оценками.
Связь исходной и двойственной задач заключается, в частности, в том, что решение одной из них может быть получено непосредственно из решения другой. Каждая из задач двойственной пары фактически является самостоятельной задачей линейного программирования и может быть решена независимо от другой.
Двойственная задача по отношению к исходной составляется согласно следующим правилам:
- Целевая функция исходной задачи формулируется на максимум, а целевая функция двойственной задачи — на минимум, при этом в задаче на максимум все неравенства в функциональных ограничениях имеют вид
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Канонический вид уравнения линейного программирования
На этом шаге мы рассмотрим представление задачи линейного программирования в канонической форме .
Если математическая модель задачи линейного программирования имеет вид:
то говорят, что задача представлена в канонической форме .
Любую задачу линейного программирования можно свести к задаче линейного программирования в канонической форме. Для этого в общем случае нужно уметь сводить задачу максимизации к задаче минимизации; переходить от ограничений неравенств к ограничениям равенств и заменять переменные, которые не подчиняются условию неотрицательности. Максимизация некоторой функции эквивалента минимизации той же функции, взятой с противоположным знаком, и наоборот.
Правило приведения задачи линейного программирования к каноническому виду состоит в следующем:
- если в исходной задаче требуется определить максимум линейной функции, то следует изменить знак и искать минимум этой функции;
- если в ограничениях правая часть отрицательна, то следует умножить это ограничение на -1;
- если среди ограничений имеются неравенства, то путем введения дополнительных неотрицательных переменных они преобразуются в равенства;
- если некоторая переменная xj не имеет ограничений по знаку, то она заменяется (в целевой функции и во всех ограничениях) разностью между двумя новыми неотрицательными переменными:
x 3 = x 3 + — x 3 — , где x 3 + , x 3 — ≥ 0 .
Пример 1 . Приведение к канонической форме задачи линейного программирования:
min L = 2x 1 + x 2 — x 3 ;
2x 2 — x 3 ≤ 5;
x 1 + x 2 — x 3 ≥ -1;
2x 1 — x 2 ≤ -3;
x 1 ≤ 0; x 2 ≥ 0; x 3 ≥ 0.
Введем в каждое уравнение системы ограничений выравнивающие переменные x4, x5, x6 . Система запишется в виде равенств, причем в первое и третье уравнения системы ограничений переменные x4, x6 вводятся в левую часть со знаком «+», а во второе уравнение переменная x5 вводится со знаком «-«.
2x 2 — x 3 + x 4 = 5;
x 1 + x 2 — x 3 — x 5 = -1;
2x 1 — x 2 + x 6 = -3;
x 4 ≥ 0; x 5 ≥ 0; x 6 ≥ 0.
Свободные члены в канонической форме должны быть положительными, для этого два последних уравнения умножим на -1:
2x 2 — x 3 + x 4 = 5;
-x 1 — x 2 + x 3 + x 5 = 1;
-2x 1 + x 2 — x 6 = 3.
В канонической форме записи задач линейного программирования все переменные, входящие в систему ограничений, должны быть отрицательными. Допустим, что x 1 = x 1 ‘ — x 7 , где x 1 ‘ ≥ 0, x 7 ≥ 0 .
Подставляя данное выражение в систему ограничений и целевую функцию и, записывая переменные в порядке возрастания индекса, получим задачу линейного программирования, представленную в канонической форме:
L min = 2x 1 ‘ + x 2 — x 3 — 2x 7 ;
2x 2 — x 3 + x 4 = 5;
-x 1 ‘ — x 2 + x 3 + x 5 + x 7 = 1;
-2x 1 ‘ + x 2 — x 6 + 2x 7 = 3;
x 1 ‘ ≥ 0; x i ≥ 0, i=2, 3, 4, 5, 6, 7.
На следующем шаге проведем графический анализ чувствительности задачи линейного программирования .