Вернёмся к уравнению прямолинейного движения точечного объекта с переменной массой (4).
 ,
,
Где  — сила, действующая на объект (вход);
— сила, действующая на объект (вход);
 — координата положения объекта – (выход);
— координата положения объекта – (выход);
 — масса объекта (параметр).
— масса объекта (параметр).
Рассматриваемое уравнение называется уравнением в форме вход-выход.
В ТАУ есть неписанные установившиеся традиционные правила, касающиеся символьного описания объекта безотносительно к его природе.
Коэффициенты уравнения принято обозначать греческими буквами

 ;
;  .
.
Сила, если она выступает в роли внешнего воздействия, то её обозначают F, а если в роли управляющего, то U.
Таким образом, уравнение (4) примет вид.
 . (5)
. (5)
Любое дифференциальное уравнение n-го порядка можно представить виде системы n уравнений первого порядка или в форме Коши (иначе говорят уравнениями в пространстве состояний). Продемонстрируем это на примере (5). Введём обозначения  ,
,  , где хi=(i=1,2) – компоненты вектора состояний. С учётом этих обозначений уравнение (5) можно переписать в виде систем уравнений в форме Коши.
, где хi=(i=1,2) – компоненты вектора состояний. С учётом этих обозначений уравнение (5) можно переписать в виде систем уравнений в форме Коши.

 .
.
| 3. Линеаризация уравнения динамики САУ |
Достаточно часто встречаются звенья, имеющие нелинейную зависимость между входной и выходной координатами. Если для малых отклонений от установившегося режима нелинейность несущественна, то в этом случае до составления исходных дифференциальных уравнений САУ выполняют процедуру линеаризации.
Линеаризацией называется замена реальных нелинейных уравнений статических характеристик элементов близкими к ним линейными уравнениями. Линеаризация возможна, если нелинейная характеристика непрерывна и имеет непрерывные частные производные. На рис.2.1. приведена геометрическая интерпретация линеаризации по методу малых отклонений.
Рис.2.1. Геометрическая интерпретация линеаризации
Разложив функцию y=f(x) в ряд Тейлора, получим
где y0— значение выхода, соответствующее входу x0; d k y/dx k — значения производных, взятых в точке А(x0;y0). Тогда для малых отклонений x:
 или
или 
где  при x=x0.
при x=x0.
Если выходная величина элемента зависит от нескольких входных воздействий, то при линеаризации по методу малых приращений следует определять частные производные по всем воздействиям, а приращение выхода является суммой частных приращений, т.е.
где x1, x2, …, xn — приращения входных воздействий;  — частные производные.
— частные производные.
4. Обобщение уравнений динамики САУ
 К линеаризованной САУ можно применить принцип суперпозиции: реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. Это позволяет звено с двумя входами u и f разложить на два звена, каждое из которых имеет один вход и один выход (рис.27). Поэтому в дальнейшем мы ограничимся изучением поведения систем и звеньев с одним входом, уравнение динамики которых имеет вид:
К линеаризованной САУ можно применить принцип суперпозиции: реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. Это позволяет звено с двумя входами u и f разложить на два звена, каждое из которых имеет один вход и один выход (рис.27). Поэтому в дальнейшем мы ограничимся изучением поведения систем и звеньев с одним входом, уравнение динамики которых имеет вид:

Это уравнение описывает САУ в динамическом режиме лишь приближенно с той точностью, которую дает линеаризация. Однако следует помнить, что линеаризация возможна только при достаточно малых отклонениях величин и при отсутствии разрывов в функции F в окрестностях интересующей нас точки, которые могут быть созданы различными выключателями, реле и т.п.
Обычно n  m, так как при n n = d n /dt n . Это лишь другое обозначение операции дифференцирования. Обратная дифференцированию операция интегрирования записывается как 1/p. В операторной форме исходное дифференциальное уравнение записывается как алгебраическое:
m, так как при n n = d n /dt n . Это лишь другое обозначение операции дифференцирования. Обратная дифференцированию операция интегрирования записывается как 1/p. В операторной форме исходное дифференциальное уравнение записывается как алгебраическое:

Не надо путать эту форму записи с операционным исчислением хотя бы потому, что здесь используются непосредственно функции времени y(t), u(t) (оригиналы), а не их изображения Y(p), U(p), получаемые из оригиналов по формуле преобразования Лапласа. Вместе с тем при нулевых начальных условиях с точностью до обозначений записи действительно очень похожи. Это сходство лежит в природе дифференциальных уравнений. Поэтому некоторые правила операционного исчисления применимы к операторной форме записи уравнения динамики. Так оператор p можно рассматривать в качестве сомножителя без права перестановки, то есть py  yp. Его можно выносить за скобки и т.п.
yp. Его можно выносить за скобки и т.п.
Поэтому уравнение динамики можно записать также в виде:

Дифференциальный оператор W(p) называют передаточной функцией. Она определяет отношение выходной величины звена к входной в каждый момент времени: W(p) = y(t)/u(t), поэтому ее еще называют динамическим коэффициентом усиления. В установившемся режиме d/dt = 0, то есть p = 0, поэтому передаточная функция превращается в коэффициент передачи звена K = bm/an.
Знаменатель передаточной функции D(p) = aop n + a1p n — 1 + a2p n — 2 + . + an называют характеристическим полиномом. Его корни, то есть значения p, при которых знаменатель D(p) обращается в ноль, а W(p) стремится к бесконечности, называются полюсами передаточной функции.
Числитель K(p) = bop m + b1p m — 1 + . + bm называют операторным коэффициентом передачи. Его корни, при которых K(p) = 0 и W(p) = 0, называются нулями передаточной функции.
Звено САУ с известной передаточной функцией называется динамическим звеном. Оно изображается прямоугольником, внутри которого записывается выражение передаточной функции. То есть это обычное функциональное звено, функция которого задана математической зависимостью выходной величины от входной в динамическом режиме. Для звена с двумя входами и одним выходом должны быть записаны две передаточные функции по каждому из входов. Передаточная функция является основной характеристикой звена в динамическом режиме, из которой можно получить все остальные характеристики. Она определяется только параметрами системы и не зависит от входных и выходных величин. Например, одним из динамических звеньев является интегратор. Его передаточная функция Wи(p) = 1/p. Схема САУ, составленная из динамических звеньев, называется структурной.
6. Элементарные динамические звенья
Динамика большинства функциональных элементов САУ независимо от исполнения может быть описана одинаковыми по форме дифференциальными уравнениями не более второго порядка. Такие элементы называют элементарными динамическими звеньями. Передаточная функция элементарного звена в общем виде задается отношением двух полиномов не более чем второй степени:
Wэ(p) =  .
.
Известно также, что любой полином произвольного порядка можно разложить на простые сомножители не более, чем второго порядка. Так по теореме Виета модно записать
где p1, p2, . pn — корни полинома D(p). Аналогично
Формы записи дифференциальных уравнений
Стационарные линейные непрерывные САУ наиболее часто описываются линейными дифференциальными уравнениями с постоянными коэффициентами:

 . (2.9)
. (2.9)
В этом уравнении  — выходная переменная (управляемая (регулируемая) величина) САУ,
— выходная переменная (управляемая (регулируемая) величина) САУ,  — входная переменная САУ. Правая часть уравнения (3.1) записана относительно управляющего воздействия
— входная переменная САУ. Правая часть уравнения (3.1) записана относительно управляющего воздействия  , однако используются формы записи уравнения относительно задающего воздействия
, однако используются формы записи уравнения относительно задающего воздействия  , возмущения
, возмущения  или нескольких входных воздействий.
или нескольких входных воздействий.
Применяется также операторная форма записи уравнения (2.9):

 . (2.10)
. (2.10)
В этом уравнении через «  » обозначен оператор дифференцирования
» обозначен оператор дифференцирования  .
.
Заметим, что по сложившейся традиции символ « » используется также в преобразованиях Лапласа и Карсона-Хевисайда, но является комплексным числом  .
.
За многолетнюю историю развития ТАУ сложились традиции формальной записи линейных дифференциальных уравнений, описывающих стационарные САУ. В учебной литературе по ТАУ они рассматриваются как стандартные формы записи дифференциальных уравнений. Рассмотрим эти формы записи на примере линейной системы второго порядка:

 (2.11)
(2.11)
или в операторной форме

 . (2.12)
. (2.12)
Первая стандартная символическая форма записи уравнения (2.11) имеет следующий вид:
 , (2.13)
, (2.13)
где  ;
;  ;
;  ;
;  .
.
Форма (2.13) представляет собой операторно-структурное описание системы, т.е. в виде операторов звеньев, составляющих структурную схему системы (далее эти понятия разъясняются), и связей между ними. В этой форме  — постоянные времени звена, измеряемые в секундах;
— постоянные времени звена, измеряемые в секундах;  — передаточный коэффициент звена.
— передаточный коэффициент звена.
Из изложенного выше следует, что уравнение (2.9) в этой форме перепишется в следующем виде:

 , (2.14)
, (2.14)
где  ;
;  ;
;  .
.
Во второй стандартной форме записи дифференциального уравнения используется передаточная функция системы, которая для рассматриваемого примера (2.11) имеет вид
 .
.
Передаточная функция САУ, поведение которой во времени описывается уравнением (2.9), имеет следующий вид :


 .
.
В формуле (2.15) через  и
и  обозначены изображения (по Лапласу) выходной и входной переменных САУ при нулевых начальных условиях и равенстве нулю внешних возмущений, а через
обозначены изображения (по Лапласу) выходной и входной переменных САУ при нулевых начальных условиях и равенстве нулю внешних возмущений, а через  и
и  — полиномы относительно комплексной переменной
— полиномы относительно комплексной переменной  .
.
Вторая стандартная форма записи дифференциального уравнения имеет следующий вид:
 или
или  . (2.16)
. (2.16)
В (2.16)  и являются полиномами (символическими) относительно оператора .
и являются полиномами (символическими) относительно оператора .
Из сравнения первой и второй стандартных форм записи дифференциальных уравнений следует, что с математической точки зрения различие между этими формами весьма несущественно и состоит лишь в различном представлении коэффициентов уравнений. В ТАУ принято называть уравнения вида (2.9) — (2.14), (2.16) уравнениями типа «вход-выход».
Третья стандартная форма записи дифференциального уравнения принципиально отличается от форм записи, описанных выше. В этой форме записи используются переменные состояния. Отметим, что понятие «состояние» является базовым в современной ТАУ (СТАУ). Переменные состояния — это промежуточные переменные системы (рис.2.2), число которых равно ее порядку  . В общем случае входные
. В общем случае входные  и выходные
и выходные  переменные могут быть векторными величинами размерности
переменные могут быть векторными величинами размерности  и
и  соответственно.
соответственно.
Рис.2.2 — Состояние системы | Переменные состояния называют также координатами состояния, так как их совокупность задает вектор состояния  . . |
Множество возможных положений этого вектора образует векторное пространство  , называемое пространством состояний системы. В переменных состояния САУ описывается векторно-матричным уравнением
, называемое пространством состояний системы. В переменных состояния САУ описывается векторно-матричным уравнением
 , (2.17)
, (2.17)
где  — квадратная матрица коэффициентов (ее называют также собственной параметрической матрицей системы);
— квадратная матрица коэффициентов (ее называют также собственной параметрической матрицей системы);  — входная матрица (матрица управления) системы;
— входная матрица (матрица управления) системы;  — выходная матрица системы;
— выходная матрица системы;
 — вектор переменных состояния — внутренних координат системы;
— вектор переменных состояния — внутренних координат системы;
 — вектор входных переменных (управляющих и возмущающих);
— вектор входных переменных (управляющих и возмущающих);
 — вектор наблюдаемых или выходных переменных; размерности матриц
— вектор наблюдаемых или выходных переменных; размерности матриц  ,
,  ,
,  , соответственно, (
, соответственно, (  ), (
), (  ), (
), (  ).
).
Процессы в САУ в свободном движении (без внешних воздействий) согласно уравнению (2.17) описываются векторно-матричным уравнением  с характеристическим уравнением
с характеристическим уравнением  , где
, где  — единичная матрица, или в развернутом виде системой дифференциальных уравнений
— единичная матрица, или в развернутом виде системой дифференциальных уравнений

с характеристическим уравнением
 . (2.18)
. (2.18)
Эти уравнения при определенных начальных условиях дают возможность изучить процессы в системе путем их решения численными методами с использованием ЭВМ.
Разработаны различные способы перехода от уравнений типа «вход-выход» к уравнениям состояния вида (2.17) и наоборот. Один из наиболее распространенных способов состоит в следующем. Пусть САУ описывается уравнением (2.9). Введем обозначения
 ,
,  , . ,
, . ,  ,
,
 .
.
С помощью этих обозначений преобразуем уравнение (3.1) к следующему виду:
 , (2.19)
, (2.19)
где  ;
;  ;
;
 ;
;  .
.
В нашем примере и  являются скалярными величинами. В общем случае (2.17) — это, соответственно, вектор наблюдаемых или выходных переменных и вектор входных переменных (управляющих и возмущающих), поэтому в (2.19) матрицы
являются скалярными величинами. В общем случае (2.17) — это, соответственно, вектор наблюдаемых или выходных переменных и вектор входных переменных (управляющих и возмущающих), поэтому в (2.19) матрицы  и
и  выродились в вектор-столбец и вектор-строку соответственно.
выродились в вектор-столбец и вектор-строку соответственно.
Система уравнений (2.19) представляет собой описание линейной непрерывной системы в пространстве состояний  . Уравнения (2.19) с матрицей
. Уравнения (2.19) с матрицей  называют уравнениями в форме Фробениуса.
называют уравнениями в форме Фробениуса.
Если  , то
, то
 ;
;  .
.
Форма уравнений (2.19) с подобными матрицами и  называется в ТАУ канонической формой фазовой переменной.
называется в ТАУ канонической формой фазовой переменной.
Задание 1
1.1. По дифференциальному уравнению системы:

Для каждого типового звена 1 – 12 (таблицы 2.1) в соответствии с его параметрами вывести дифференциальное уравнение, операторное уравнение, и выражение передаточной функции.
1.2Математическое описание типового звена системы автоматического регулирования записать в трех формах записи дифференциальных уравнений.
Первая стандартная символическая форма операторно-структурное описание системы, т.е. в виде операторов звеньев.
Во второй стандартной форме записи дифференциального уравнения используется передаточная функция системы.
Третья стандартная форма записи дифференциального уравнения — переменные состояния.
Таблица 2.1 – Исходные коэффициенты
| № п.п. | Наименование звена | а 0 | а 1 | а 2 | b0 | b1 | Примечания |
| Безынерционное (пропорциональное) | к | ||||||
| Инерционное 1-го порядка (апериодическое) | Т | k | |||||
| Инерционное 2-го по- рядка (апериодическое) | Т2 2 | Т1 | k | Т1³2Т2 | |||
| Инерционное 2-го по- рядка (колебательное) | Т2 2 | Т1 | k | Т1 T |
Задание 2
2.1Для каждого звена (таблицы 2.2) по его передаточной функции записать дифференциальное уравнение.
2.2 Математическое описание типового звена системы автоматического регулирования записать в трех формах записи дифференциальных уравнений.
| Вар | Передаточная функция | Значения параметров передаточной функции |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; а4=0,5;в0=1;в1=3; в2=0,8;в3=0,3 | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; в0=1;в1=3; в2=0,8 | |
 | а0=1; а1=5; а2 =1,2; в0=1; в1=3; | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; а4=0,5; в0=10 | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; в0=10 | |
 | а0=1; а1=5; а2 =1,2; а3=0,9;а4=0,5;в0=1;в1=3; в2=0,8;в3=0,3 | |
 | Т0=2; Т1=4; Т2=1,1;Т3=0,9 | |
 | Т0=2; Т1=4; Т2=1,1;Т3=1,1;Т4=,9 | |
 | К= 10;Т1=4; Т2=1,1;Т3=0,9 | |
 | К= 10; Т2=1,1;Т3=0,9 Т4=0,9 | |
 | Т0=0,7; Т1=3;Т2=1,2;Т3=0,9;Т4=0,8;Т5=0,5 | |
 | К=10 Т0=0,7; Т1=3;Т2=1,2;Т3=0,9;Т4=0,8;Т5=0,5; |
Задание №3
3.1 Для заданной схемы необходимо составить операторное уравнение для каждого элемента схемы САУ.
3.2. Определить входные и выходные величины каждого элемента, и определить передаточные функции отдельных элементов функциональной схемы.
Формы записи дифференциальных уравнений.
3.3Сформировать математическое описание систем автоматического регулирования в виде структурной схемы в буквенном и числовом обозначениях.
3.4 Сформировать математическое описание систем автоматического регулирования в виде третьей стандартной формы записи дифференциального уравнения — В переменных состояния САУ описываемых векторно-матричным уравнением.
Схема, показанная на рисунке 2.2, представляет собой САР температуры в помещении. Объектом регулирования (ОР) в данной системе является помещение, для которого регулируемая величина — температура внутри помещения Ө, регулирующее (управляющее) воздействие — температура воздуха ӨК, поступающего из калорифера, возмущающее воздействие — изменения внешних факторов f(в общем случае изменение температуры атмосферного воздуха, его влажности, скорости ветра). При исследовании системы в качестве основного возмущения следует рассматривать изменение температуры окружающего воздуха.
Воспринимающим органом — ВО (датчиком, чувствительным элементом) в данной САР является терморезистор RД, включенный в мостовую схему, обеспечивающую с помощью резистора RОзадание необходимого значения температуры в помещении и выполняющую также функции сравнивающего органа — СО (элемента сравнения). Усиление сигнала разбалансаΔU(сигнала рассогласования) измерительной мостовой схемы обеспечивается посредством усилителя. Усиленный сигнал Uобеспечивает вращение двухфазного исполнительного двигателя, который изменяет перемещение клапана (заслонки) на трубопроводе подачи парав калорифер, чем достигается изменение температуры воздуха на входе калорифера — регулирующего воздействия на объектерегулирования.
 |
1 — помещение; 2 — теплообменник (калорифер), 3 — измерительная мостовая схема; 4 — двухфазный исполнительный двигатель, 5 — дифференциальный магнитный усилитель; 6 — клапан (заслонка)
Рис. 2.2. Схема САР температуры
Динамические свойства объекта регулирования и элементов системы описываются следующими уравнениями:

где То, Т2, Т3, Т4 — постоянные времени, с; Ө — значение температуры воздуха в помещении, °С, Ө к — значение температуры воздуха на выходе калорифера, °С; к, к1, к2, к3, к4— коэффициенты передачи; f— возмущающее воздействие на объекте регулирования; Uд —падение напряжения на термодатчике, В; ΔU— напряжение на выходе мостовой схемы (сигнал рассогласования), В; μ. — линейное перемещение клапана, см; U0 — задающий сигнал, В.
Значения параметров элементов САР по вариантам даны в таблице 2.3.
Заданное значение температуры в помещении Ө = 20 °С.
Значения параметров элементов САР
| Вариант | Т0, с | Т2, с | к | к1, В/ 0 С | к4 | к2, см/(В*с) | f,. 0 С | К3, °С/см |
| 0,06 | 0,2 | 0,2 | 0,002 | -11 | ||||
| 0,07 | 0,25 | 0,3 | 0,001 | |||||
| 0,08 | 0,3 | 0,25 | 0,0018 | -8 | ||||
| 0,09 | 0,35 | 0,2 | 0,002 | |||||
| 0,10 | 0,4 | 0,2 | 0,002 | -5 | ||||
| 0,50 | 0,18 | 0,25 | 0,003 | |||||
| 0,055 | 0,19 | 0,4 | 0,0035 | |||||
| 0,06 | 0,17 | 0,4 | 0,0025 | -15 | ||||
| 0,06 | 0,25 | 0,2 | 0,0016 | |||||
| 0,08 | 0,4 | 0,15 | 0,0014 | -18 |
Примечание. Для всех вариантов постоянные времени Т3 = 20 с, Т4=0,5 с.
Схема САР, приведенная на рисунке 2.3, обеспечивает стабилизацию угловой скорости электродвигателя постоянного тока который совместно с рабочим механизмом является объектом регулирования. Регулируемая величина объекта — угловая скорость двигателя ω, регулирующее воздействие — напряжение Uг,подаваемое от генератора на якорь двигателя. Возмущающее воздействие на объекте регулирования — момент сопротивления Мс, создаваемый рабочим механизмом. Угловая скорость двигателя ωконтролируется тахогенератором, сигнал которого Uтг, пропорциональный скорости, сравнивается с задающим сигналом U3. Сигнал рассогласования ΔU = U3— UTг усиливается магнитным усилителем и воздействует на обмотку возбуждения генератора, выполняющего функции исполнительного органа (элемента).
Динамические свойства объекта регулирования и элементов САР описываются следующими уравнениями:

гдеТд, Ту, Tv — постоянные времени, с; Кд, Км, Ктг, Ку, Кг — коэффициенты передачи соответствующих элементов систем

1 — задающий потенциометр; 2 — магнитный усилитель; 3 — генератор; 4 — двигатель; 5 — тахогенератор; 6 — рабочий механизм
Рис. 2.3. Схема САР угловой скорости электродвигателя
Значения параметров элементов САР
| Вариант | Ту, с | Ку | Кг | Тг, с | Кд, рад/ с*В | Тд, с | Км рад/ с*Н* м | Мс, Н*м | Кгг, В*с/ рад |
| 0,020 | 4,0 | 2,0 | 0,10 | 1,0 | 0,5 | 0,02 | 1,0 | ||
| 0,015 | 5,0 | 1,8 | 0,12 | 0,95 | 0,60 | 0,03 | 0,9 | ||
| 0,018 | 4,5 | 1,7 | 0,15 | 0,85 | 0,70 | 0,04 | |||
| 0,022 | 6,0 | 1,5 | 0,20 | 0,8 | 0,80 | 0,05 | 0,7 | ||
| 0,020 | 5,8 | 1,6 | 0,16 | 1,5 | 0,65 | 0,06 | 0,6 | ||
| 0,025 | 4,2 | 2,0 | 0,25 | 1,4 | 0,75 | 0,07 | 0,5 | ||
| 0,020 | 3,5 | 2,7 | 0,22 | 1,3 | 0,80 | 0,08 | 0,4 | ||
| 0,028 | 6,2 | 2,1 | 0,30 | 1,2 | 0,75 | 0,02 | 0,5 | ||
| 0,018 | 6,5 | 2,3 | 0,16 | 1,0 | 0,50 | 0,013 | 0,6 | ||
| 0,014 | 7,0 | 2,5 | 0,20 | 1,25 | 0,80 | 0,015 | 0,7 |
Значения параметров объекта регулирования и элементов системы для различных вариантов указаны в таблице 2.4. Заданное значение угловой скорости ω = 40 рад/с.
На рисунке 2.4 изображена схема САР давления Р в ресивере (воздухосборнике) 1, который является в данной системе объектом регулирования. Давление в ресивере регулируется посредством изменения количества воздуха Q, зависящего от положения заслонки 2, т.е. от ее линейного перемещения Х3, которое можно рассматривать как регулирующее воздействие на входе объекта регулирования. Внешним возмущением, вызывающим отклонение регулируемой величины — давления Р, является изменение расхода сжатого воздуха Qc.

Рис 2.4 Схема САР давления Р в ресивере
Давление в данной системе контролируется с помощью сильфонного датчика 3, выходная величина которого — перемещение Хс сильфона 5 однозначно зависит от разности сил ΔF= F0— Fp, где Fp— сила, создаваемая давлением Р, F0— сила натяжения пружины 6, которое можно изменять винтом 7.
Перемещение сильфона Хсс помощью потенциометрического преобразователя 4 преобразуется в электрический сигнал — напряжение U, которое усиливается электронным усилителем 8. Выходной сигнал усилителя Uyуправляет электромагнитным приводом 9, связанным с заслонкой 2,
В данной САР сильфонный датчик выполняет функции воспринимающего, задающего и сравнивающего органов. Как воспринимающий орган он контролирует давление Р, преобразуя его в силу Fp. Задание требуемого давления в ресивере обеспечивается посредством силы F0. Как сравнивающий орган сильфон обеспечивает сравнение величин F0 и Fp, в результате чего, как отмечалось ранее, получается ΔF= F0 — Fp — сигнал рассогласования.
Динамические свойства объекта регулирования и элементов САР описываются следующей системой уравнений:

| заслонкой |
Физическая сущность переменных, входящих в уравнения, отражена выше в описании схемы САР. Параметры T0, T1, T2, T3 и К0, Кq, Кв, Кc, Кп, Ку, К3 — соответственно постоянные времени и коэффициенты передачи. Их размерности и значения по вариантам даны в таблице 2.5. Требуемое значение давления Р = 500 кПа.
Значения параметров элементов САР
| Вариант | Т0,с | Ко КПа/мм | Т1,с | Т2,с | Кс мм/Н | Кв Н/кПа | КQ, Кпа*с/м 3 | ΔQC, м3/с | Кп В/мм | Ку | Т3 | К3 Мм/В |
| 1,3 | 0,2 | 0,045 | 2,5 | 0,5 | 0,1 | 0,2 | 0,01 | |||||
| 0, 25 | 0 ,04 | 2,5 | 0,5 | -0, 2 | 0,2 | 0,01 | ||||||
| 0,6 | 3,5 | 0,34 | 0,022 | 2,5 | 0,5 | 0,3 | 0,2 | 0,01 | ||||
| 4,8 | 0,25 | 0,035 | 2,5 | 0,5 | -0,15 | 0,2 | 0,01 | |||||
| 0,7 | 4,5 | 0,3 | 0,04 | 2,5 | 0,5 | 0,12 | 0, 9 | 0,01 | ||||
| 0,8 | 3,5 | 0,18 | 0, 025 | 2 ,5 | 0,5 | -0,2 | 0 ,2 | 0,01 | ||||
| 0,4 | 4,4 | 0,25 | 0,03 | 2,5 | 0,5 | 0,11 | 0,2 | 0,01 | ||||
| 0,65 | 5,5 | 0,2 | 0,02 | 2,5 | 0,5 | -0,12 | 0,2 | 0,01 | ||||
| 0, 7 | 0, 4 | 0 ,025 | 2,5 | 0,5 | 0,14 | 0,2 | 0,01 | |||||
| 0,55 | 0,25 | 0,035 | 2,5 | 0,5 | -0,14 | 0,2 | 0,01 |
На электрических станциях при производстве электроэнергии предъявляют определенные требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью ω рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащают САР угловой скорости. На рисунке 2.5 показана схема одного из вариантов такой САР.
В данной системе объектом регулирования является гидротурбина 1, регулируемой величиной — угловая скорость ω .Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, т. е. от мощности Р, которая потребляется от генератора 2 (с увеличением мощности угловая скорость снижается, с уменьшением — возрастает). Таким образом, мощность Р является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости предусмотрена заслонка 3, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения X заслонки. Следовательно, перемещение заслонки X можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость ω контролируется посредством тахогенератора 4, ЭДС Е которого сравнивается с задающим напряжением U0. Сигнал рассогласования Δ U через усилитель 5 управляет посредством электродвигателя 6 и редуктора 7 заслонкой 3.
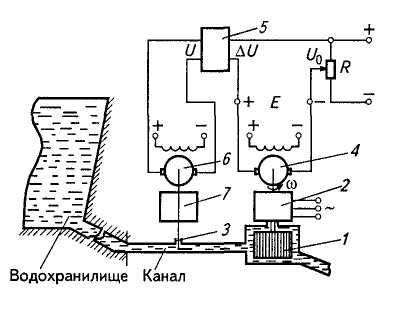 |
Рис. 2.5 Схема САР угловой скорости рабочего колеса гидротурбины
Динамические свойства элементов САР описываются следующей системой уравнений:
Формы записи законов управления в виде дифференциальных уравнений
9) Передаточная функция — один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой обработке сигналов. Представляет собой дифференциальный оператор, выражающий связь между входом и выходом линейной стационарной системы. Зная входной сигнал системы и передаточную функцию, можно восстановить выходной сигнал.
В теории управления передаточная функция непрерывной системы представляет собой отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного сигнала при нулевых начальных условиях.
12)Стандартная форма записи линейных уравнений
В общем виде линеаризованное дифференциальное уравнение одномерного элемента можно представить в виде (2.1):
 (2.1)
(2.1)
, где y(t), x(t), f(t) — выходная, входная и возмущающее величины элемента или системы (в отклонения от состояния равновесия);ai, bi, ci — постоянные коэффициенты;
n — порядок уравнения, при этом n≥m — условие физической реализуемости элемента.
Для удобства и формализации решений уравнение (2.1) может быть пред-ставлено в одной из пяти стандартных форм:
1. в форме Коши;
2. в пространстве состояний;
3. в виде передаточных функций — W(p), Φ(p), Φε(p).
4. решение относительно регулируемой величины — y(t);
5. решение относительно ошибки — Δ(t);
13-14) Структурное схематическое представление законов управления
Преобразования структурных схем. Структурная схема системы в простейшем случае строится из элементарных динамических звеньев. Несколько элементарных звеньев могут быть заменены одним звеном со сложной передаточной функцией. Для этого существуют правила эквивалентного преобразования структурных схем.
Последовательное соединение (рис. 2.5.1) — выходная величина предшествующего звена подается на вход последующего. При этом можно записать:
 Рис. 2.5.1. Рис. 2.5.1. |
Wэкв =  Wi.
Wi.
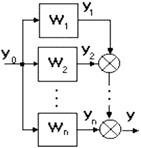 Рис. 2.5.2. Рис. 2.5.2. |
Передаточные функции последовательно соединенных звеньев перемножаются.
Параллельное соединение (рис.2.5.2) — на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются:
Wэкв =  Wi.
Wi.
 Рис. 2.5.3. Рис. 2.5.3. |
Цепочка звеньев, соединенных параллельно, преобразуется в звено с передаточной функцией, равной сумме передаточных функций отдельных звеньев.
Замкнутое соединение с обратной связью (рис. 2.5.3а) — звено охвачено положительной или отрицательной обратной связью. Участок цепи, по которому сигнал идет с выхода на вход, называется цепью обратной связи с передаточной функцией Wос. Для отрицательной обратной связи (ОС):
Для положительной ОС:
Если Woc = 1, то обратная связь называется единичной (рис. 2.5.3б):
 Рис. 2.5.4. Рис. 2.5.4. |
Как прямая Wп, так и обратная Wос цепь может состоять из нескольких функциональных блоков и образует замкнутую систему. Замкнутую систему называют одноконтурной, если при ее размыкании (отсоединении обратной связи от сумматора с y0) получают цепочку из последовательно соединенных элементов. Замкнутые системы бывают и многоконтурными (рис. 2.5.4).Чтобы найти эквивалентную передаточную функцию для данной схемы нужно сначала определить передаточные функции отдельных участков.
15-16) передаточная функция одноконтурной и многоконтурной схемы
Замкнутые системы бывают одноконтурными и многоконтурной (рис.32).Чтобы найти эквивалентную передаточную функцию для данной схемы нужно сначала осуществить преобразование отдельных участков.
Если многоконтурная система имеет перекрещивающиеся связи (рис.33), то для вычисления эквивалентной передаточной функции нужны дополнительные правила:
4. При переносе сумматора через звено по ходу сигнала необходимо добавить звено с передаточной функцией того звена, через которое переносится сумматор. Если сумматор переносится против хода сигнала, то добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим сумматор (рис.34).
Так с выхода системы на рис.34а снимается сигнал
Такой же сигнал должен сниматься с выходов систем на рис.34б:
При подобных преобразованиях могут возникать неэквивалентные участки линии связи (на рисунках они заштрихованы).
5. При переносе узла через звено по ходу сигнала добавляется звено с передаточной функцией, обратной передаточной функции звена, через которое переносим узел. Если узел переносится против хода сигнала, то добавляется звено с передаточной функцией звена, через которое переносится узел (рис.35).
Так с выхода системы на рис.35а снимается сигнал
Такой же сигнал снимается с выходов рис.35б:
6. Возможны взаимные перестановки узлов и сумматоров: узлы можно менять местами (рис. 36а); сумматоры тоже можно менять местами (рис.36б); при переносе узла через сумматор необходимо добавить сравнивающий элемент (рис.36в: y = y1 + f1 = > y1 = y — f1) или сумматор (рис.36г: y = y1 + f1).
Во всех случаях переноса элементов структурной схемы возникают неэквивалентные участки линии связи, поэтому надо быть осторожным в местах съема выходного сигнала.
При эквивалентных преобразованиях одной и той же структурной схемы могут быть получены различные передаточные функции системы по разным входам и выходам. Так на рис.48 имеется два входа: по управляющему воздействию u и возмущению f при одном выходе y. Такая схема может быть преобразована к одному звену с двумя передаточными функциями Wuy и Wfy.
17) Формула мейсона
Для многоконтурных схем, более сложных чем рассмотренная, процедуры предварительных переносов и последовательного свертывания оказываются достаточно трудоемкими. Поэтому для таких схем целесообразно использовать формулу Мейсона:
 , (60)
, (60)
где  – передаточная функция i-го прямого канала, связывающего вход
– передаточная функция i-го прямого канала, связывающего вход  с выходом
с выходом  ; m – число таких каналов;
; m – число таких каналов;  – специальный полином, который определенным образом характеризует совокупность всех замкнутых цепей системы, содержащих обратные связи, и вычисляется как сумма передаточных функций разомкнутых контуров этих цепей и произведений передаточных функций разомкнутых контуров пар, троек и т.д. не соприкасающихся друг с другом цепей с обратными связями:
– специальный полином, который определенным образом характеризует совокупность всех замкнутых цепей системы, содержащих обратные связи, и вычисляется как сумма передаточных функций разомкнутых контуров этих цепей и произведений передаточных функций разомкнутых контуров пар, троек и т.д. не соприкасающихся друг с другом цепей с обратными связями: