- Определение и формулы пружинного маятника
- Уравнения колебаний пружинного маятника
- Формулы периода и частоты колебаний пружинного маятника
- Формулы амплитуды и начальной фазы пружинного маятника
- Энергия колебаний пружинного маятника
- Примеры задач с решением
- Свободные колебания пружинного маятника. Общие сведения
- Вынуяеденные колебания. Резонанс
- Вывод дифференциального уравнения вынуяеденных колебаний пружинного маятника
Определение и формулы пружинного маятника
Пружинным маятником называют систему, которая состоит из упругой пружины, к которой прикреплен груз.
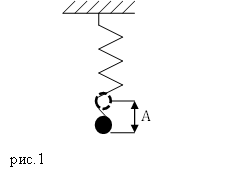
Допустим, что масса груза равна $m$, коэффициент упругости пружины $k$. Масса пружины в таком маятнике обычно не учитывается. Если рассматривать вертикальные движения груза (рис.1), то он движется под действием силы тяжести и силы упругости, если систему вывели из состояния равновесия и предоставили самой себе.
Уравнения колебаний пружинного маятника
Пружинный маятник, совершающий свободные колебания является примером гармонического осциллятора. Допустим, что маятник совершает колебания вдоль оси X. Если колебания малые, выполняется закон Гука, то уравнение движения груза имеет вид:
где $^2_0=frac$ — циклическая частота колебаний пружинного маятника. Решением уравнения (1) является функция:
где $_0=sqrt<frac>>0$- циклическая частота колебаний маятника, $A$ — амплитуда колебаний; $_0t+varphi )$ — фаза колебаний; $varphi $ и $_1$ — начальные фазы колебаний.
В экспоненциальном виде колебания пружинного маятника можно записать как:
[Re tilde=Releft(Acdot exp left(ileft(_0t+varphi right)right)right)left(3right).]
Формулы периода и частоты колебаний пружинного маятника
Если в упругих колебаниях выполняется закон Гука, то период колебаний пружинного маятника вычисляют при помощи формулы:
Так как частота колебаний ($nu $) — величина обратная к периоду, то:
Формулы амплитуды и начальной фазы пружинного маятника
Зная уравнение колебаний пружинного маятника (1 или 2) и начальные условия можно полностью описать гармонические колебания пружинного маятника. Начальные условия определяют амплитуда ($A$) и начальная фаза колебаний ($varphi $).
Амплитуду можно найти как:
начальная фаза при этом:
где $v_0$ — скорость груза при $t=0 c$, когда координата груза равна $x_0$.
Энергия колебаний пружинного маятника
При одномерном движении пружинного маятника между двумя точками его движения существует только один путь, следовательно, выполняется условие потенциальности силы (любую силу можно считать потенциальной, если она зависит только от координат). Так как силы, действующие на пружинный маятник потенциальны, то можно говорить о потенциальной энергии.
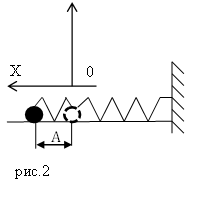
Пусть пружинный маятник совершает колебания в горизонтальной плоскости (рис.2). За ноль потенциальной энергии маятника примем положение его равновесия, где поместим начало координат. Силы трения не учитываем. Используя формулу, связывающую потенциальную силу и потенциальную энергию для одномерного случая:
учитывая, что для пружинного маятника $F=-kx$,
тогда потенциальная энергия ($E_p$) пружинного маятника равна:
Закон сохранения энергии для пружинного маятника запишем как:
где $dot=v$ — скорость движения груза; $E_k=frac<m<dot>^2>$ — кинетическая энергия маятника.
Из формулы (10) можно сделать следующие выводы:
- Максимальная кинетическая энергия маятника равна его максимальной потенциальной энергии.
- Средняя кинетическая энергия по времени осциллятора равна его средней по времени потенциальной энергии.
Примеры задач с решением
Задание. Маленький шарик, массой $m=0,36$ кг прикреплен к горизонтальной пружине, коэффициент упругости которой равен $k=1600 frac$. Каково было начальное смещение шарика от положения равновесия ($x_0$), если он при колебаниях проходит его со скоростью $v=1 frac$?
Решение. Сделаем рисунок.
По закону сохранения механической энергии (так как считаем, что сил трения нет), запишем:
где $E_$ — потенциальная энергия шарика при его максимальном смещении от положения равновесия; $E_$ — кинетическая энергия шарика, в момент прохождения положения равновесия.
Потенциальная энергия равна:
В соответствии с (1.1) приравняем правые части (1.2) и (1.3), имеем:
Из (1.4) выразим искомую величину:
Вычислим начальное (максимальное) смещение груза от положения равновесия:
Ответ. $x_0=1,5$ мм
Задание. Пружинный маятник совершает колебания по закону: $x=A $где $A$ и $omega $ — постоянные величины. Когда возвращающая сила в первый раз достигает величины $F_0,$ потенциальная энергия груза равна $E_$. В какой момент времени это произойдет?
Решение. Возвращающей силой для пружинного маятника является сила упругости, равная:
Потенциальную энергию колебаний груза найдем как:
В момент времени, который следует найти $F=F_0$; $E_p=E_$, значит:
Свободные колебания пружинного маятника. Общие сведения

Цель работы. Ознакомиться с основными характеристиками незатухающих и затухающих свободных механических колебаний.
Задача. Определить период собственных колебаний пружинного маятника; проверить линейность зависимости квадрата периода от массы; определить жесткость пружины; определить период затухающих колебаний и логарифмический декремент затухания пружинного маятника.
Приборы и принадлежности. Штатив со шкалой, пружина, набор грузов различной массы, сосуд с водой, секундомер.
1. Свободные колебания пружинного маятника. Общие сведения
Колебаниями называются процессы, в которых периодически изменяется одна или несколько физических величин, описывающих эти процессы. Колебания могут быть описаны различными периодическими функциями времени. Простейшими колебаниями являются гармонические колебания – такие колебания, при которых колеблющаяся величина (например, смещение груза на пружине) изменяется со временем по закону косинуса или синуса. Колебания, возникающие после действия на систему внешней кратковременной силы, называются свободными.
Рассмотрим одну из простейших колебательных систем – пружинный маятник, представляющий собой груз массой m, подвешенный на абсолютно упругой пружине с коэффициентом жесткости k
(рис. 1). Пусть l0 – длина пружины без подвешенного к ней груза. При подвешивании груза под действием силы тяжести пружина растянется на x1 так, что маятник будет находиться в положении равновесия вследствие равенства модулей силы тяжести mg и упругой силы Fупр: mg = kx1, стремящейся вернуть груз в положение равновесия (полагается, что деформации пружины идеально упругие и подчиняются закону Гука).


Если груз вывести из положения равновесия, отклонив на величину x, то сила упругости возрастает: Fупр = – kx2= – k(x1 + x). Дойдя до положения равновесия, груз будет обладать отличной от нуля скоростью и пройдет положение равновесия по инерции. По мере дальнейшего движения будет увеличиваться отклонение от положения равновесия, что приведет к возрастанию силы упругости, и процесс повторится в обратном направлении. Таким образом, колебательное движение системы обусловлено двумя причинами: 1) стремлением тела вернуться в положении равновесия и 2) инерцией, не позволяющей телу мгновенно остановиться в положении равновесия. В отсутствии сил трения колебания продолжались бы сколь угодно долго. Наличие силы трения приводит к тому, что часть энергии колебаний переходит во внутреннюю энергию и колебания постепенно затухают. Такие колебания называются затухающими.
Незатухающие свободные колебания
Сначала рассмотрим колебания пружинного маятника, на который не действуют силы трения – незатухающие свободные колебания. Согласно второму закону Ньютона c учетом знаков проекций на ось X
 (1)
(1)
Из условия равновесия смещение, вызываемое силой тяжести:  . Подставляя
. Подставляя  в уравнение (1), получим:
в уравнение (1), получим:  . Разделив правую и левую часть этого уравнения на m и принимая, что a = d2x/dt2, получим дифференциальное уравнение
. Разделив правую и левую часть этого уравнения на m и принимая, что a = d2x/dt2, получим дифференциальное уравнение
 . (2)
. (2)
Это уравнение называется дифференциальным уравнением гармонических колебаний пружинного маятника. Из этого уравнения следует, что после прекращения внешнего воздействия, приводящего к первоначальному отклонению системы от положения равновесия, движение груза обусловлено только действием упругой силы (сила тяжести вызывает постоянное смещение).
Общее решение однородного дифференциального уравнения второго порядка (2) имеет вид
 . (3)
. (3)
Данное уравнение называется уравнением гармонических колебаний. Наибольшее отклонение груза от положения равновесия А0 называется амплитудой колебаний. Величина  , стоящая в аргументе косинуса, называется фазой колебания. Постоянная φ0 представляет собой значение фазы в начальный момент времени (t = 0) и называется начальной фазой колебаний. Величина
, стоящая в аргументе косинуса, называется фазой колебания. Постоянная φ0 представляет собой значение фазы в начальный момент времени (t = 0) и называется начальной фазой колебаний. Величина
 (4)
(4)
есть круговая или циклическая частота собственных колебаний, связанная с периодом колебаний Т соотношением  . Период колебаний определяется
. Период колебаний определяется
 . (5)
. (5)
Рассмотрим свободные колебания пружинного маятника при наличии силы трения (затухающие колебания). В простейшем и вместе с тем наиболее часто встречающемся случае сила трения пропорциональна скорости υ движения:
где r – постоянная, называемая коэффициентом сопротивления. Знак минус показывает, что сила трения и скорость имеют противоположные направления. Уравнение второго закона Ньютона в проекции на ось Х при наличии упругой силы и силы трения
Данное дифференциальное уравнение с учетом υ = dx/dt можно записать
 , (8)
, (8)
где  – коэффициент затухания; – циклическая частота свободных незатухающих колебаний данной колебательной системы, т. е. при отсутствии потерь энергии (β = 0). Уравнение (8) называют дифференциальным уравнением затухающих колебаний.
– коэффициент затухания; – циклическая частота свободных незатухающих колебаний данной колебательной системы, т. е. при отсутствии потерь энергии (β = 0). Уравнение (8) называют дифференциальным уравнением затухающих колебаний.
Чтобы получить зависимость смещения x от времени t, необходимо решить дифференциальное уравнение (8). В случае малых затуханий ( ) решение уравнения можно записать следующим образом:
) решение уравнения можно записать следующим образом:
 , (9)
, (9)
где А0 и φ0 – начальная амплитуда и начальная фаза колебаний;
 – циклическая частота затухающих колебаний при ω >>
– циклическая частота затухающих колебаний при ω >>  ω ≈ ω0.
ω ≈ ω0.
Движение груза в этом случае можно рассматривать как гармоническое колебание с частотой ω и переменной амплитудой, меняющейся по закону:
 . (10)
. (10)
На графике функции (9), рис. 2, пунктирными линиями показано изменение амплитуды (10) затухающих колебаний.

Рис. 2. Зависимость смещения х груза от времени t при наличии силы трения
Для количественной характеристики степени затухания колебаний вводят величину, равную отношению амплитуд, отличающихся на период, и называемую декрементом затухания:
 . (11)
. (11)
Часто используют натуральный логарифм этой величины. Такой параметр называется логарифмическим декрементом затухания:
 . (12)
. (12)
Если за время t‘ амплитуда уменьшается в n раз, то из уравнения (10) следует, что
 . (13)
. (13)
Отсюда для логарифмического декремента получаем выражение
 . (14)
. (14)
Если за время t‘ амплитуда уменьшается в е раз (е = 2,71 – основание натурального логарифма), то система успеет совершить число колебаний
 . (15)
. (15)
Следовательно, логарифмический декремент затухания – величина, обратная числу колебаний, совершаемых за то время, за которое амплитуда уменьшается в е раз. Чем больше θ, тем быстрее происходит затухание колебаний.
2. Методика эксперимента и экспериментальная установка

Рис. 3. Схема установки
Установка состоит из штатива 1 с измерительной шкалой 2. К штативу на пружине 3 подвешиваются грузы 4 различной массы. При изучении затухающих колебаний в задании 2 для усиления затухания используется кольцо 5, которое помещается в прозрачный сосуд 6 с водой.
В задании 1 (выполняется без сосуда с водой и кольца) в первом приближении затуханием колебаний можно пренебречь и считать гармоническими. Как следует из формулы (5) для гармонических колебаний зависимость T 2 = f (m) – линейная, из которой можно определить коэффициент жесткости пружины k по формуле
 , (16)
, (16)
где  – угловой коэффициент наклона прямой T 2 от m.
– угловой коэффициент наклона прямой T 2 от m.
Задание 1. Определение зависимости периода собственных колебаний пружинного маятника от массы груза.
1. Определить период колебаний пружинного маятника при различных значениях массы груза m. Для этого с помощью секундомера для каждого значения m трижды измерить время t полных n колебаний (n ≥10) и по среднему значению времени  вычислить период
вычислить период  . Результаты занести в табл. 1.
. Результаты занести в табл. 1.
2. По результатам измерений построить график зависимости квадрата периода T2 от массы m. Из углового коэффициента графика определить жесткость пружины k по формуле (16).
Результаты измерений для определения периода собственных колебаний
 , с
, с
 , с
, с
Вынуяеденные колебания. Резонанс
В реальных колебательных системах всегда имеют место потери энергии, что приводит к затуханию колебаний. Система совершает незатухающие колебания, когда на неё действует внешняя, периодически изменяющаяся сила, компенсирующая потери энергии.
Колебания, возникающие в системе под действием периодической внешней силы, называются вынуяеденными. Переменная внешняя сила, приложенная к колебательной системе и вызывающая вынужденные колебания, называется вынуждающей силой F (О-
В колебательном контуре компенсируются потери энергии, если в контур включён источник электрической энергии, основными характеристиками которого являются электродвижущая сила (ЭДС) и внутреннее сопротивление.
Источник электрической энергии в электротехнике называют источником ЭДС (источником напряжения). В механических системах потери энергии компенсируются работой внешних сил по преодолению сил трения.
Вывод дифференциального уравнения вынуяеденных колебаний пружинного маятника
Вынужденные колебания пружинного маятника происходят под действием вынуждающей силы F ehm.(t), изменяющейся со временем t по гармоническому закону с циклической частотой со

где F вын.(0 — мгновенное значение (в момент времени г) вынуждающей силы,
F т.вын — амплитуда колебаний вынуждающей силы.
На колебательную систему, кроме вынуждающей силы F вын, одновременно действуют упругая сила Fvnp и сила трения Fmp, равные

где к — коэффициент упругости пружины, г — коэффициент пропорциональности.
Уравнение движения тела массой пружинного маятника, по второму закону Ньютона, имеет вид 
Пусть маятник движется вдоль оси о х (рис. 190). Запишем уравнение (19.81) в проекции на ось ох

разделим уравнение на т — массу тела и  введём обозначения
введём обозначения
тогда получим дифференциальное уравнение вынужденных колебаний пружинного маятника

Вывод дифференциального уравнения вынужденных колебаний в электрическом колебательном контуре
В реальном электрическом колебательном контуре электрическое сопротивление R отлично от нуля (рис.191). Поэтому, если возникают свободные колебания в контуре, то они постепенно затухают.
Формула закона Ома для участка цепи 1 -R-L-2 имеет вид

где (g>i — q>2) — разность потенциалов обкладок конденсатора,
равная qjj— (р-> = iL,
С q — электрический заряд на обкладках конденсатора,
С — ёмкость конденсатора,
J — сила электрического тока, J = С 1Я_,
Е (t) — электродвижущая сила (ЭДС) внешнего источника напряжения

Запишем уравнение (19.83) в виде

затем разделим на индуктивность катушки L и введём обозначения

где р — коэффициент затухания свободных колебаний,
а>0 — циклическая частота свободных затухающих колебаний, когда
сопротивление R контура равно нулю (R = 0).

Подставим эти обозначения в (19.84)
Формула (19.85) представляет собой дифференциальное уравнение вынуяеденных колебаний в электрическом колебательном контуре.
Уравнения (19.85) и (19.82) аналогичны друг другу, поэтому заменим их уравнением вида
электрического колебательного контура S = q, 2ft = ,со0 = 1 .
Уравнение (19.86) является линейным неоднородным (с правой частью, отличной от нуля) дифференциальным уравнением второго порядка. Общее решение этого уравнения представляет собой сумму решения однородного уравнения (S одн) и частного решения (S част) неоднородного уравнения
Однородное уравнение для колеблющейся величины S имеет вид


Для пружинного маятника S = х, 2/3 = —,со0 2 = —, F0 =f т.вЬ1Н, а Д ля
где частота со равна
Уравнение (19.88) описывает собственные затухающие колебания величины S. Они прекращаются через некоторый интервал времени (множитель е убывает со временем по экспоненте, поэтому им можно пренебречь).
Величина S совершает незатухающие (установившиеся во времени) вынужденные колебания, описываемые частным решением уравнения (19.87) 
где А — амплитуда колебаний, А = S тах,
со — циклическая частота колебаний, равная циклической частоте вынуждающей силы,
А ср — сдвиг по фазе между вынуждающей силой и вынужденными колебаниями.
На рис. 192 показан график установившихся вынужденных колебаний величины S. Характер вынужденных колебаний определяется, как величиной внешней силы, так и свойствами колебательной системы. Собственные затухающие колебания имеют место в течение интервала времени t = t раск , когда происходит раскачка колебательной системы.

Время раскачки t раск зависит от коэффициента затухания Д чем меньше величина Д тем больше это время. Когда прекращаются собственные затухающие колебания, система совершает вынужденные (незатухающие) установившиеся колебания.
Характер вынужденных колебаний изменяется со временем, когда начинает действовать внешняя периодическая сила. Только через некоторое время устанавливаются вынужденные колебания, период Т которых равен периоду внешней силы. Вынужденные колебания возникают тем быстрее, чем больше затухание собственных колебаний в колебательной системе.
Для вывода формул, определяющих амплитуду А установившихся вынужденных колебаний и сдвиг по фазе А C L_§_ в уравнение (19.86)

Каждое слагаемое в данном уравнении описывает гармонически изменяющуюся величину, но для всех слагаемых одинаковая частота со и различные фазы колебаний.

Первое слагаемое на векторной диаграмме (рис. 193) изображается вектором, длина которого равна А со ”. Он направлен в отрицательном направлении горизонтальной оси (противоположно вектору, представляющему третье слагаемое). Третье слагаемое, стоящее в левой части уравнения, представлено на векторной диаграмме вектором, длиной А со0 2 , направленным по горизонтальной оси в положительном направлении (вправо).
Второе слагаемое на векторной диаграмме изображается вектором длиной, равной 2А /> со. Этот вектор повёрнут от
горизонтальной оси на угол 71 против часовой стрелки.
На рис. 194,195 представлен результат сложения трёх векторов, когда со со0.
Векторная сумма векторов с длинами, равными 2А [3 со и А со0 2 должна быть равна вектору длиной F0 (рис. 194).

Результат сложения векторов зависит от соотношения частот со
и С0о. Суммарный вектор длиной F0 является диагональю
прямоугольника со сторонами 2А /3 со и А (со0 со ). Он составляет с
горизонтальной осью угол А соа. В формуле стоит квадрат выражения (со 2 ,, — со 2 ) 2 .

Согласно (19.90), амплитуда А вынужденных колебаний зависит от соотношения собственной частоты со0 и частоты со вынуждающей силы, а так же от коэффициента затухания /1. Заметим, что увеличение амплитуды колебаний ограничено, независимо от соотношения частот со0 и со. Это объясняется тем, что с ростом амплитуды увеличивается скорость колебательного движения, а вместе с ней и сила трения (сила сопротивления). Колебательная система интенсивно расходует энергию. Тогда амплитуда автоматически принимает значение, при котором прибыль энергии извне компенсирует расходы на преодоление трения (на излучение и др.).
Сдвиг по фазе А ср, как следует из векторной диаграммы, определяется формулой


Из формул (19.90) и (19.91) следует, что амплитуда А вынужденных колебаний и сдвиг по фазе А ср между вынужденными колебаниями и вынуждающей силой определяются параметрами, характеризующими вынуждающую силу, такими, как амплитуда А, частота со, а так же параметрами колебательной системы, а именно, собственной частотой колебаний со0, коэффициентом затухания /1.
В механической колебательной системе (пружинный маятник) величины А и А ср зависят от массы т колеблющего тела, а у электрического колебательного контура — индуктивности L катушки. Амплитуда А и сдвиг по фазе А ср установившихся вынужденных колебаний не зависят от времени t и начальных условий.
Вынужденные колебания отстают по фазе от вынуждающей силы, вызывающей их, на величину А ср, зависящую от частоты со вынуждающей силы, которая периодически изменяется во времени. Объясним, почему это происходит на примере механической колебательной системы (пружинного маятника).
Считаем, что в начальный момент времени (t = 0) он покоится. Вынуждающая сила F (?) равна нулю. Затем внешняя сила F (?) смещает тело массы т из положения равновесия, совершая положительную работу.
Через четверть периода (t = Т_) величина внешней силы F (7) и
смещения х достигают максимального значения. Затем, внешняя сила убывает со временем, а тело под действием возвращающей силы (силы упругости F у„р) движется к положению равновесия.
При отсутствии внешней силы тело вернулось бы в положение равновесия (начальное положение) через промежуток времени, равный четверти собственного периода колебаний.
В реальных условиях внешняя сила, убывая по величине со временем, тормозит движение тела. Она совершает отрицательную работу.
Тело движется замедленно, скорость его уменьшается. Колебания пружинного маятника начинают отставать от колебаний вынуждающей силы, опережающей смещение тела.
Следует заметить, что параметры, характеризующие вынужденные колебания, происходящие под действием внешней периодической силы, определяются добротностью Q.