- Аннотация научной статьи по механике и машиностроению, автор научной работы — Пильгунов В. Н.
- Похожие темы научных работ по механике и машиностроению , автор научной работы — Пильгунов В. Н.
- Текст научной работы на тему «Математическая модель гидропривода с двойным объёмным регулированием»
- Математическая модель силовой части гидропривода с объемным регулированием
- Механика гидро — и пневмоприводов
- Переходные процессы в гидро — и пневмоприводах
- Корректирование характеристик гидро — и пневмоприводов
- Автоколебания в управляющих устройствах гидро — и пневмоприводов
- Продажа шагающий экскаватор 20/90
- Математические модели гидравлического привода с LS-управлением шагающей машины
- Боровин Г.К., Костюк А.В. (G.K.Borovin, A.V.Kostyuk)
- Москва, 2000 Работа выполнена при поддержке Российского фонда фундаментальных исследований (проекты №№ 00-15-96660, 98-01-00939)
- Аннотация
- Abstract
- Содержание
- Введение
- Введение
- Регулирующая аппаратура
- Принцип работы пропорционального распределителя
- Исполнительные гидроцилиндры
- Возможные варианты схем
- Выбор рабочего давления
- Литература
Аннотация научной статьи по механике и машиностроению, автор научной работы — Пильгунов В. Н.
Рассмотрена работа объёмного гидропривода с двумя регулируемыми гидромашинами насосом и гидромотором . С учётом утечек и перетечек в гидромашинах, а также деформационных расходов в магистралях и присоединённых к ним объёмам рабочих камер гидромашин, получены обобщённые дифференциальные уравнения гидропривода с двойным объёмным регулированием, работающего по разомкнутой и замкнутой схемам регулирования. Нагрузка регулируемого гидромотора предусматривает наличие постоянной, позиционной, скоростной и инерционной составляющих. Математические модели гидропривода имеют функциональные множители и мультипликативные связи между параметрами регулирования насоса и регулируемого гидромотора . Для получения частных решений дифференциальных уравнений необходимо предусмотреть наличие дополнительных функциональных связей между параметрами гидропривода.
Похожие темы научных работ по механике и машиностроению , автор научной работы — Пильгунов В. Н.
Текст научной работы на тему «Математическая модель гидропривода с двойным объёмным регулированием»
НАУЧНОЕ ИЗДАНИЕ МГТУ ИМ. Н. Э. БАУМАНА
НАУКА и ОБРАЗОВАНИЕ
Эл № ФС77 — 4 8211. Государственная регистрация №042 1200025. ISSN 1994-0408
электронный научно-технический журнал
Математическая модель гидропривода с двойным объёмным регулированием. # 07, июль 2014
DOI: 10.7463/0714.0719749 Пильгунов В. Н.1а
УДК 543.8 + 541.13
1Россия, МГТУ им. Н.Э. Баумана a vnp41@yandex.ru
Рассмотрена работа объёмного гидропривода с двумя регулируемыми гидромашинами — насосом и гидромотором. С учётом утечек и перетечек в гидромашинах, а также деформационных расходов в магистралях и присоединённых к ним объёмам рабочих камер гидромашин, получены обобщённые дифференциальные уравнения гидропривода с двойным объёмным регулированием, работающего по разомкнутой и замкнутой схемам регулирования. Нагрузка регулируемого гидромотора предусматривает наличие постоянной, позиционной, скоростной и инерционной составляющих. Математические модели гидропривода имеют функциональные множители и мультипликативные связи между параметрами регулирования насоса и регулируемого гидромотора. Для получения частных решений дифференциальных уравнений необходимо предусмотреть наличие дополнительных функциональных связей между параметрами гидропривода.
Ключевые слова: двойное объёмное регулирование, регулируемый гидромотор, объёмная утечка, объёмная перетечка, деформационный расход, параметр регулирования.
Интерес, проявляемый к гидроприводам промышленного назначения с двойным объёмным регулированием (регулируемые насос и гидромотор) определяется, во-первых, особенностями характеристик регулируемого гидромотора (РГМ) и, во-вторых, возможностью создания объёмного гидропривода, работающего по принципу централизованной трёхфазной гидравлической розетки с линиями высокого давления P, слива T и дренажа L 3. Питание гидравлических розеток осуществляется от насосной установки с регулируемым насосом ограниченной или неограниченной мощности, снабжённым регулятором давления, а рабочие органы объекта управления обслуживаются регулируемыми гидромоторами и линейными гидродвигателями (гидроцилиндрами), подключаемыми к этим розеткам [4]. По аналогии с системой электроприводов со стабилизированным источником напряжения V = const и ограничением по току исполнительного электродвигателя, в
гидравлической розетке поддерживаются постоянные давления питания p = const и слива Т = const, а расход РГМ ограничен величиной lim Q2 = Q2 наиб. В объёмных гидроприводах, адаптированных к нагрузке («Load — Sensing» = LS — гидроприводы), наибольшее значение давления питания в гидравлической розетке устанавливается в соответствии с требованием необходимости преодоления нагрузки на наиболее нагруженном гидродвигателе [5]. Гидростатическая трансмиссия вторичного регулирования, управляемая по давлению, по сравнению с традиционной системой регулирования по расходу (параметру регулирования насоса), получила широкое распространение благодаря ряду преимуществ:
• улучшенными динамическими характеристиками в переходных процессах;
• повышенной точностью регулирования скорости вращения вала РГМ и позиционирования нагрузки в следящем гидроприводе;
• высоким быстродействием, обусловленным приближением входного воздействия гидропривода к объекту управления;
• простотой рекуперации гидравлической энергии без её трансформирования;
• способностью адаптироваться к нагрузке в LS — приводах.
К гидроприводу первичного регулирования будем относить гидропривод с регулируемым насосом и нерегулируемым гидромотором; во вторичном регулировании управляемым является гидромотор, а питающая установка выполнена на базе нерегулируемого насоса, снабжённого переливным клапаном, или на базе регулируемого насоса с регулятором давления. Гидропривод с двойным объёмным регулированием (посредством насоса и гидромотора) можно рассматривать как комбинацию первичного и вторичного регулирований.
Вопросы математического моделирования объёмного гидропривода с регулируемыми гидромашинами рассмотрены в ряде работ 9, однако вопросы совместной работы двух регулируемых гидромашин с одновременным управлением их параметрами регулирования в этих работах не рассматриваются.
Преобладающее количество выпускаемых промышленностью РГМ не предусматривает возможность реверсирования вращения выходного вала с проходом регулирующего органа РГМ через ноль, поскольку такая процедура обладает рядом недостатков:
• на малых углах установки регулирующего органа аксиально-поршневых гидромоторов (наклонного блока цилиндров или наклонной шайбы) возникают повышенные усилия в поршневой группе и самоторможение выходного вала РГМ;
• ненагруженный гидромотор при малых значениях параметра регулирования склонен к развитию «разгонных» оборотов своего выходного вала;
• при малых значениях параметра регулирования существенно проявляется пилооб-разность усилия на регулирующем органе РГМ и связанные с этим повышенные динамические нагрузки в узлах механизма управления его рабочим объёмом.
При первичном регулировании скорость вращения выходного вала нерегулируемого гидромотора определяется текущим значением характерного объёма насоса и скоростью вращения его приводного вала. В промышленных гидроприводах большой мощности используется централизованный источник питания с регулируемым насосом, снабжённым регулятором давления или регулятором мощности [11, 12]. В этом случае реверсирование вращения вала нерегулируемого гидромотора и управление скоростью возможно только при дроссельном регулировании, обладающим низким КПД. В LS-гидроприводах возможно комбинированное объёмно-дроссельное регулирование: регулируемый насос, управляемый по давлению или по давлению и расходу одновременно (снабжённый автоматом мощности), выполняет функцию источника питания ограниченной или условно неограниченной мощности, а РГМ реализует принцип вторичного объёмного регулирования с ограничением по максимальному расходу. При соответствующей организации команд управления регулируемым насосом и РГМ возможно создание оптимального гидропривода, работающего в режиме наибольшего КПД ] = f]max.
В смежных по тематике работах группы авторов 15 рассматривается возможность использования регулируемого гидромотора в составе двухмоторного агрегата с расширенным диапазоном бесступенчатого регулирования.
Предлагаемая математическая модель гидропривода с двойным объёмным регулированием может быть использована при проектировании гидроприводов широкого диапазона применения и рассматривается автором как оригинальная.
1. Обобщённая математическая модель гидропривода с двойным объёмным регулированием
При разработке математической модели гидропривода физическим величинам, характеризующим работу насоса, присвоен индекс «1», а гидромотора — индекс «2». Размерность физических величин, представленных в системе СИ, в тексте статьи не оговаривается.
Статические характеристики РГМ представляют собой семейства функциональных зависимостей между его выходными и входными координатами [16], значения которых устанавливаются после окончания переходных процессов
— расходно — скоростная характеристика РГМ
(Q2 ) = -*- = kwuQ2 , U2 = const, (1)
где Q2 — угловая скорость вращения выходного вала РГМ; Q2 — геометрический расход РГМ, определяющий угловую скорость вращения вала; 0 Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Централизованные идеализированные питающие установки объёмного гидропривода могут быть объединены в три группы.
К первой группе относятся питающие установки постоянного давления px = inv.: в
эту группу входят гидравлические аккумуляторы большой ёмкости, объёмные регулируемые насосы, снабжённые регулятором давления, и объёмные нерегулируемые насосы с переливным клапаном. Среди питающих установок этой группы следует выделить питающую установку ограниченной мощности =lim(p1Q)=(pQ) и питающую установку условно неограниченной мощности Цт^ = lim(pQ) = , к которой можно отнести
установку с насосом, характерный объём которого W1 >> W2.
Ко второй группе принадлежат питающие установки постоянной подачи Q1 = const.. В эту группу входят установки с нерегулируемым насосом, снабжённым клапаном ограничения давления с крутопадающей характеристикой и установки с регулируемым насосом, снабжённым регулятором подачи.
К третьей группе можно отнести питающие установки, обеспечивающие зависимость подачи от давления Q = Q (p ), среди них могут быть установки с нерегулируемым насосом, снабжённым клапаном ограничения давления с пологой характеристикой. и установки с регулируемым насосом, снабжённым регулятором мощности N = (pQQ)=inv с ограничениями по подаче и давлению lim Q1 = Qlmax и limp = p^.
Магистраль высокого давления гидропривода удобно рассматривать как связующее звено между рабочими камерами насоса и РГМ, а её характеристику можно получить с учётом уравнения неразрывности.
Принципиальные схемы объёмного гидропривода с комбинированным объёмно-дроссельным регулированием, работающего по разомкнутой и замкнутой схемам, представлены на рис. 1 (а, б).
Рис.1. Принципиальные схемы гидропривода с двойным объёмным регулированием.
В ЬБ-гидроприводе в целях ограничения максимального расхода гидромотора в напорную магистраль встраивается регулируемый дроссель или ограничитель расхода с электромагнитным пропорциональным управлением. Для корректировки динамических свойств гидропривода возможно введение в схему гидропривода регламентированных
утечек Qyp в разомкнутой схеме регулирования и регламентированных перетечек Qnp в замкнутой схеме.
Рассмотрим баланс расходов в объёмном гидроприводе.
Для разомкнутой схемы гидропривода:
• суммарный расход утечек
• суммарный расход перетечек
Для замкнутой схемы гидропривода:
• суммарный расход утечек
• суммарный расход перетечек
Qn = Qni+Qn2+Qnp- (13)
В уравнениях переходных процессов баланс расходов предусматривает наличие дополнительных составляющих приведённых деформационных расходов и Q%2, обусловленных сжимаемостью рабочей жидкости в объёмах участков магистрали и в присоединённых к ним объёмам рабочих камер гидромашин, а также деформацией стенок трубопроводов магистрали высокого давления. На рис.1а,б объёмы рабочих камер и участков присоединённых к ним магистралей представлены гидравлическими ёмкостями. В гидроприводе с объёмно-дроссельным регулированием в магистраль устанавливается регулируемый дроссель-ограничитель расхода, через который проходит полный расход магистрали QM = GM уЦ( p — p2), где GM — гидравлическая проводимость магистрали с установленным в ней ограничителем расхода. Для разомкнутой схемы гидропривода расход в магистрали в переходных процессах определяется выражением
Qm = Qi -Qyi -Qm -Q„1 = 02+0У2 + Qn2 + Qд2 + Qyp, (14)
а для замкнутой схемы
Qm = Qi — Qyi — Qmi — Q^i = Q2 + Qy2 + Qn2 + Qm2 + Qnp , (15)
где Q — деформационный расход в объёме рабочих камер насоса и в объёме участка магистрали между выходом из насоса и ограничителем расхода; Q2 — деформационный
расход в объёме рабочих камер РГМ и в объёме участка магистрали между ограничителем расхода и входом в РГМ.
В i-ой дросселирующей щели течение вязкой рабочей жидкости происходит в ламинарном режиме, поэтому мощности гидравлических потерь утечек Ny и перетечек Nm в уплотняющих щелях можно представить выражениями [ 16]
где Ку и Кщ — коэффициенты утечек и перетечек в уплотняющих щелях с эквивалентными зазорами Syi и Зщ; М — динамическая вязкость рабочей жидкости. Для концентричной уплотняющей щели поршневой группы с условно неподвижными стенками
где D и L, соответственно, диаметр и длина поршня (у плунжера длина L переменна). Коэффициент суммарных утечек учитывает половину числа поршней, находящихся под высоким давлением напорной магистрали. Для более точной оценки утечек в поршневой группе необходимо учитывать фрикционные расходы [19], обусловленные взаимным перемещением стенок уплотняющей щели
Qf= sign 0,5xDSvn,
где 5 — радиальный зазор; уП — скорость движения поршня (sign+ соответствует гидромотору). Для двух уплотняющих поясков торцевого распределителя можно принять
где L и B — длина окружности и ширина пояска соответственно. Коэффициент перетечек по двум перемычкам торцевого распределителя
где B и L — ширина и длина перемычки. Суммарный фрикционный расход перетечек по двум перемычкам равен нулю.
Как и при оценке механических потерь, оценим потерянную мощность утечек в долях геометрической мощности гидромашины [20]
где СУ1 = —^^— коэффициент, оценивающий мощность потерь в долях геометрической
мощности гидромашины. Безразмерная величина с = (функция Зоммерфельда) оце-
нивает характер потока в узкой щели [21].
Аналогичный вид имеет формула потерянной мощности перетечек
Суммируя мощности объёмных потерь (17) и (18) и разделив сумму на перепад давлений Р( , получим суммарный расход объёмных потерь, вызванный негерметичностью гидромашины
О! = (С* + Сп)(Р 1Ц^ . (19)
Приведём полученный суммарный расход объёмных потерь к характерному объёму насоса
где Тп = (Cy + Cmi)
WiUiWiPi = ^riWiUiWiPi , (20)
— приведённый к характерному объёму насоса па-
раметр герметичности 1-й гидромашины.
Как показано в работе [16], приведённый к геометрической мощности гидромашины коэффициент герметичности Сщ = (Cy + Cm) может быть определён по линиям постоянного давления и постоянной подачи (расхода) на топографической характеристике гидромашины как потерянная подача насоса (потерянная угловая скорость гидромотора), приведённая к единице давления pi.
В замкнутой схеме гидропривода суммарные утечки компенсируются подпиточным насосом с подачей Qu.h. = Qyi + Qy2-
Запишем уравнение для определения 1-го деформационного расхода, приведённого к характерному объёму насоса w1 в виде
где e = W’2 — приведённый к характерному объёму насоса параметр упругости; E — при-EWj
ведённый модуль упругости рабочей жидкости; Wi — объём жидкости, заключённый в рабочих камерах гидромашины и в примыкающем к гидромашине участке магистрали с разделом по месту установки дросселя; D = — — оператор дифференцирования.
Очевидно, что при длинной магистрали объёмами рабочих камер гидромашин можно пренебречь.
Подстановка полученных выражений расходов утечек, перетечек и деформационных расходов в уравнения неразрывности (14) и (15) устанавливает зависимость между геометрическим расходом РГМ и объёмной подачей насоса
для разомкнутой схемы гидропривода
2 2 2 Q2 = Q 1 — TnU1W1 Р1 — e1W1 Dp1 — ТГ2 W1U2W2P2 — e2W1 Dp2 — GypP2 , (22)
для замкнутой схемы гидропривода
2 2 2 Q2 = Q1 — TnU1W1 p1 — e1W1 Dp1 — ХГ2 W1U2W2p2 — e2W1 Dp2 — Gnpp2 , (23)
где Gyp и Gnp, соответственно, проводимости регуляторов расхода, имитирующих регламентированные утечки и перетечки.
В гидроприводе с двойным объёмным регулированием может отсутствовать ограничитель расхода и проводимость магистрали будет определяться только её гидравлическим сопротивлением.
Связь давления Р2 с нагрузкой на валу РГМ установим в соответствии с его момент-ной статической характеристикой (9)
р2 = М2 + /СД2° 2U2w2 2 (1 — C)U2W2 ‘
Подстановка полученного значения давления p2 и регулировочной характеристики насоса Q1 = Uw1° в уравнения (22) и (23) определяет соотношение между угловой скоростью вращения вала РГМ °2, угловой скоростью вращения вала насоса °1, давлением на выходе насоса p1, нагрузкой М2 на валу РГМ и соотношением параметров регу-Ui .
для разомкнутой схемы гидропривода
_ (°iUiWi -^nUiWi2Pi — eiWi2DPi — e2Wi2pP2 — GypPi) °2 _ тт ; (25)
для замкнутой схемы гидропривода
(°iUiWi-r^UiWi2Pi -eiWi2DPi -e2Wi2DP2 -GypP2)
После подстановки значения давления Р2 (24) в уравнения (25), (26), получим: — для разомкнутой схемы гидропривода
(Q^-rnUiWi2Pi -eiWi2DPi) f-
£T2Wl + _Gy^+ e2W1 D
VU2W2 U22w22 U22w22 У
для замкнутой схемы гидропривода
aJ-°iU,Wi-rnUiWi2Pi -eiWi2DPi) Г-
VU2W2 U2 W2 U2 W2 У
Рассмотрим работу гидропривода при различных режимах работы регулируемого насоса.
1.1. Насос с регулятором давления
Регулятор давления устанавливает функциональную связь между давлением p1 и параметром регулирования U1 в целях поддержания постоянного давления источника питания p1 = const. В этом случае уравнения (27) и (28) будут дополнены функциональной зависимостью U1 = U^p) В гидроприводе установится режим вторичного регулирова-
ния по нагрузке М2 на валу РГМ: величина угловой скорости Q2 будет определяться работой регулятора давления, управляющего параметром регулирования Ui, и нагрузкой М2 на валу РГМ. Для преодоления заданной нагрузки в режиме pi = const, в соответствии с регулировочной моментной характеристикой РГМ (9). будет установлено соответствующее значение параметра регулирования U2. В замкнутой схеме гидропривода, как прави-
ло, принимается соотношение характерных объёмов гидромашин —L 1. В адаптивном к нагрузке гидроприводе (LS — регулирование) приоритет настрой-W2
ки давления pi = const отдаётся наиболее нагруженному гидродвигателю. При внезапном снятии нагрузки М2 = 0 крутящий момент на валу РГМ будет определяться только механическими потерями
Ммех = [(1 — ^W2P2 — ^Ce202W2]. Регулятор давления, в целях поддержания заданного давления pi = inv., придаст параметру регулирования насоса наибольшее значение Ui = i и РГМ будет развивать повышенную скорость вращения выходного вала, для предотвращения которой необходимо предусмотреть наличие в гидроприводе устройства, ограничивающего расход РГМ, перекрывающего подводящую магистраль или уменьшающего параметр регулирования Ui до его минимального значения Ui = UjHauM.. Командный сигнал для срабатывания такого устройства должен быть сформирован установленным на валу РГМ гидравлическим или электрическим тахогенератором или реле минимального давления Р2 = Р2 наим.
1.2. Насос ограниченной мощности с регулятором подачи
Регулятор подачи будет обеспечивать функциональную связь между подачей насоса Qi и параметром регулирования Ui = Ui(Qi) в целях поддержания заданного значения подачи Qi = const в условиях ограничения по давлению lim pi = piHauM., а также определит постоянство значения числителя WiQiUi = const первого слагаемого уравнений (27) и (28).
В этих условиях величина угловой скорости вращения вала РГМ Q2 будет определяться нагрузкой на его валу М2 и параметром регулирования U?. При несанкционированным сбросе нагрузки М2 = 0 разгонные обороты вала РГМ возможны только на малых значениях параметра регулирования Ц?: для предотвращения разгонных оборотов необходимо наличие в гидроприводе устройства, уменьшающего параметр регулирования Ui или перекрывающего магистраль высокого давления при обязательном наличии предохранительных клапанов.
1.3. Насос с регулятором мощности
Регулятор рабочего объёма насоса обеспечивает функциональную связь Ui = Ui(piQi) между гидравлической мощностью насоса Ni = piQi = const и параметром регулирования Ui в условиях ограничения по давлению lim pi = piHau6. и по подаче limQi = QiHau6..
Регулятор давления и регулятор мощности имеют схожие алгоритмы управления: при увеличении давления в магистрали подача насоса должна уменьшаться. Такой режим работы применим, в основном, для управления гидроприводом, обслуживающим нагрузку со стабилизацией скорости вращения выходного вала РГМ или для программного управления угловой скоростью вращения вала РГМ в режиме постоянной мощности.
Возможно создание оптимального энергосберегающего гидропривода с двойным объёмным регулированием, работающего в режиме наибольшего КПД., когда устанавливается функциональная связь между параметрами регулирования Ui и U2 через промежуточные параметры pi, M2 и Q2. Реализация алгоритма управления параметрами Ui и U2 возможна путём использования вычислителя программируемого логического контроллера.
Рассмотрим работу позиционного гидропривода с двойным объёмным регулированием на примере разомкнутой схемы: нагрузка на валу РГМ имеет все виды составляющих крутящего момента
M2 = M20 + Kn02 + Kc D02 + Ки D202, (29)
где D = — — оператор дифференцирования; 02 — угол поворота выходного вала РГМ; M20 -dt
постоянная составляющая момента нагрузки; Кп — крутизна характеристики позиционной составляющей нагрузки («шарнирный момент»); Кс — крутизна характеристики скоростной составляющей нагрузки; Ки — крутизна характеристики инерционной составляющей нагрузки.
Подстановка значения нагрузки (29) в выражение угловой скорости Q2 замкнутой схемы (27) определяет обобщённое дифференциальное уравнение позиционного гидропривода с двойным объёмным регулированием
(Q,U,w,-тпиж2р, -e,w,2Dp I г „ Jbw.Uw + GVP +eyw,2D)
DQ2 = l 111 ‘ 11 ^[о +KQ + (Кс ^^PQ + K^Q f » ‘ , 2 1 ‘ (30)
С точностью до бесконечно малых второго порядка после приведения подобных членов получим
(AD2 + BD + 1) Q = CUU — Щи
где функциональные множители A, B, C и E имеют следующие значения:
A= [e2W1 (KC + MCB2U2W2) + тг 2W1U2W2 ки + gyfkh ] кп (тг2W1U2W2 + GMF ) ‘
[U22W22(1 » C) + e2W12КП + (ТГ2W1U2W2 + GyFXКС + MCB2U2W2)]
кп (тг2W1U2W2 + оур )’
Обобщённые дифференциальные уравнения гидропривода (30) и (31) имеют в своём составе мультипликативные связи между параметрами регулирования СЦ¡Ц? и ЕЦ1Ц?, а функциональные множители (32) определяются параметром регулирования РГМ Ц?-
В скоростном гидроприводе с двойным объёмным регулированием в нагрузке на валу РГМ отсутствует позиционная составляющая момента Кп = 0
М2 = М20 + Кс О02 + КИ Б^. (33)
Подстановка значения нагрузки (33) в выражение (27) угловой скорости О2 замкнутой схемы определяет обобщённое дифференциальное уравнение скоростного гидропривода с двойным объёмным регулированием:
(ОД^ -rnU1W12p1 — e1W12Dp1)
-IM20 + (КС + mCB2U2W2)DQ2 + КИ D2Q2]-(t Г + fe + ^ (34)
С точностью до бесконечно малых второго порядка, после приведения подобных членов получим
(BD + 1)Q = CUU — EUjU2
где функциональные множители В, C, E и F имеют следующие значения:
Е = [e2W12 (кс + MCB2U2W2 ) + ки (тг2W1U2W2 + Gпр )]
[U22W22(1 — С) + (кс + MCB2U2W2)’Or2W1U2W2 + Gпр )]
2 (1 — c) + (КС +^CB2U2W2)-(rr2W1U2W2 + Gпр )
[U2 W2 (1 — C) + (кс + MCB2U2W2)’Or2W1U2W2 + Gпр )]
F=_(тг2W1U2W2 + Gпр )__(36)
[U22W22(1 — C) + (кс + vcb 2U2W2)-(tr2W1U2W2 + G пр )]
Необходимо отметить, что проводимости регламентированных утечки Gyp и перетечки Опр присутствуют в значениях всех функциональных множителей и влияют на постоянные времени гидропривода.
Запишем выражение расхода в магистрали через момент на валу РГМ
В гидроприводе с регулятором давления pi = const увеличение момента нагрузки М2 вызовет уменьшение расхода в магистрали Qm и наоборот, уменьшение момента нагрузки увеличит этот расход. В соответствии с регулировочной моментной характеристикой (9), для преодоления возросшего момента М2 на валу РГМ необходимо увеличить его параметр регулирования U2 , что вызовет уменьшение угловой скорости ^2. Таким образом, уменьшение угловой скорости будет определяться двумя факторами — уменьшением расхода в магистрали и увеличением параметра регулирования РГМ.
1. При составлении математической модели гидропривода с двойным объёмным регулированием необходимо раздельно учитывать утечки и перетечки в гидромашинах.
2. Деформационные расходы в длинных магистралях и присоединённых к ним рабочих камерах гидромашин существенно влияют на постоянную времени гидропривода.
3. Полученные обобщённые дифференциальные уравнения гидропривода с двойным объёмным регулированием имеют функциональные множители и носят сложный многосвязный характер.
4. Наличие мультипликативных связей в виде произведений параметров регулирования гидромашин U1U2 требует использования дополнительных зависимостей между
входящими в дифференциальные уравнения величинами в виде обратных связей.
5. Введение в гидропривод дополнительных регламентированных утечек Gyp и перетечек Gnp, снижающих, общий КПД гидропривода, усиливает демпфирующие свойства гидропривода и оказывает существенное влияние на динамику гидропривода в переходных процессах.
1. Голубев В.И., Грибков А.М., Драгомиров Д.В. Применение гидравлической передачи с регулируемым гидромотором в качестве трансмиссии автономной ветроэнергетической установки // Междунар. науч.-техн. конференция «Гидравлические машины, гидроприводы и гидропневмоавтоматика. Современное состояние и развитие»: тез. докл. СПб.: СПбГПУ, 2008. С. 183-187.
2. Kordak R., Nikolaus H. Les transmission hydraustatique a regulation secondaire. Les cours d’hydraulique. Vol. 6. Mannesmann Rexroth. RF 00293, 1989. 75 p.
3. Kordak R. Einsatzbeispiele sekundargeregelter Antriessysteme. Expose a l occasion du 2-me colloque hydraulique de Hambourg. Avril 1985.
4. Mentzner F. Kennwerte der Dynamik sekundargeregelter Axialkolbeneinheiten. Dissertation. Universite militaire de RFA, Hambourg, 1985.
5. Kordak R. Sekundargeregelter hydrostatishe Antriebe // Jurn. O + P. 1985. No. 9.
6. Schlosser W.M. Mathematical model for hydraulic power and motors // Hydraulic power transmission. 1961. Vol. 7, no. 76. P. 252-257.
7. Thoma J. Mathematical models and effective performance of hydraustatic mashines and transmission // Hydraulic and Pneumatic power. 1969. November. P. 642-651.
8. Городецкий К.И., Михайлин А.А. Математическая модель объёмных гидромашин // Вестник машиностроения. 1981. № 9. С. 12-14.
9. Лепёшкин А.В. Математическая модель, оценивающая КПД роторной гидромашины // Привод и управление. 2000. № 1. С. 17-19.
10. Васильев Л.В. Развитие математического моделирования гидроагрегатов на основе применения элементов теории подобия // Приводная техника. 2001. № 1. С. 30-43.
11. Шухман С.Б., Соловьев В.И., Прочко Е.И. Повышение КПД полнопоточной гидрообъёмной трансмиссии за счёт комбинированного способа регулирования гидромашин // Вестник машиностроения. 2006. № 2. С. 27-33.
12. Тагиева Н.К. Трансмиссии, используемые в строительно-дорожной технике // Вестник МАДИ (ГТУ). 2009. № 1. С. 30-33.
13. Драгомиров Д.В. Исследование энергодинамических и регулировочных характеристик гидропривода с гидромоторным блоком расширенного диапазона: дис. . канд. техн. наук. М., 2010. 179 с.
14. Голубев В.И., Зуев Ю.Ю., Драгомиров Д.В. Исследование характеристик объёмной гидравлической передачи с регулируемым двухмоторным агрегатом // Вестник МЭИ. 2010. № 2. С. 5-14.
15. Драгомиров Д.В., Голубев В.И., Зуев Ю.Ю., Феденков В.В. Исследование гидромоторного агрегата с расширенным диапазоном бесступенчатого регулирования скорости // Строительные и дорожные машины. 2010. № 4. С. 28-31.
16. Прокофьев В.Н., Данилов Ю.А., Кондаков Л.А. и др. Аксиально-поршневой регулируемый гидропривод / под. ред. В.Н. Прокофьева. М.: Машиностроение, 1969. 496 с.
17. Прокофьев В.Н. Основы функциональной взаимозаменяемости гидропередач // Взаимозаменяемость и технические измерения в машиностроении: межвуз. сб. Вып. 4. М.: Машиностроение, 1964. С. 217-250.
18. Кулагин А.В., Демидов Ю.С., Прокофьев В.Н., Кондаков Л.А. Основы теории и конструирования объёмных гидропередач. М.: Высшая школа, 1968. 396 с.
19. Blackburn J.F., Reethof G., Shearer J.L. Fluid Power Control. Massachusetts: MIT Press, 1960.
20. Драгомиров Д.В., Голубев В.И. Моделирование потерь энергии в объёмно-роторных гидромашинах аксиального типа // Междунар. науч.-техн. конференция «Радиоэлектроника, электротехника и энергетика»: тез. докл. Т. 3. М.: МЭИ, 2010. С. 270-272.
21. Wilson E. Positive Displacement Pumps and Fluid Motors. N.J., Pitman Publishing Corp., 1950.
SCIENTIFIC PERIODICAL OF THH BAUMAN MSTU
SCIENCE and EDUCATION
EL № FS77 — 48211. N»0421200025. ISSN 1994-0408
electronic scientific and technical journal
A Computational Model of Hydraulic Volume Displacement Drive
1Bauman Moscow State Technical University, 105005, Moscow, Russian Federation avnp41@yandex.ru
Keywords: external and internal leakages, compression loss volume, internal leakage
The paper offers a computational model of industrial-purpose hydraulic drive with two hydraulic volume adjustable working chamber machines (pump and motor). Adjustable pump equipped with the pressure control unit can be run together with several adjustable hydraulic motors on the principle of three-phase hydraulic socket-outlet with high-pressure lines, drain, and drainage system. The paper considers the pressure-controlled hydrostatic transmission with hydraulic motor as an output link. It shows a possibility to create a saving hydraulic drive using a functional tie between the adjusting parameters of the pump and hydraulic motor through the pressure difference, torque, and angular rate of the hydraulic motor shaft rotation. The programmable logic controller can implement such tie. The Coulomb and viscous frictions are taken into consideration when developing a computational model of the hydraulic volume displacement drive. Discharge balance considers external and internal leakages in equivalent clearances of hydraulic machines, as well as compression loss volume caused by hydraulic fluid compressibility and deformation of pipe walls. To correct dynamic properties of hydraulic drive, the paper offers that in discharge balance are included the additional regulated external leakages in the open circuit of hydraulic drive and regulated internal leakages in the closed-loop circuit. Generalized differential equations having functional multipliers and multilinked nature have been obtained to describe the operation of hydraulic positioning and speed drive with two hydraulic volume adjustable working chamber machines. It is shown that a proposed computational model of hydraulic drive can be taken into consideration in development of LS («Load-Sensing») drives, in which the pumping pressure is tuned to the value required for the most loaded slave motor to overcome the load. Results attained can be used both in designing the industrial-purpose heavy-
duty hydraulic drives with improved adjusting characteristics and in creating the multilink hydraulic drives to work with the centralized powers sources of restricted power.
1. Golubev V.I., Gribkov A.M., Dragomirov D.V. The use of hydraulic transmission with adjustable hydraulic motor as transmission of autonomous wind power plant. Mezhdunar. nauch.-tekhn. konferentsiia «Gidravlicheskie mashiny, gidroprivody i gidropnevmoavtomatika. Sovremennoe sostoianie i razvitie «: tez. dokl. [The International scientific and technical conference «Hydraulic machines, hydrodrive and hydropneumatic automation. Current state and development «: abstracts]. St. Petersburg, SPbGPU Publ., 2008, pp. 183-187. (in Russian).
2. Kordak R., Nikolaus H. Les transmission hydraustatique a regulation secondaire. Les cours d’hydraulique. Vol. 6. Mannesmann Rexroth. RF 00293, 1989. 75 p.
3. Kordak R. Einsatzbeispiele sekundar geregelter Antriessysteme. Expose a l’occasion du 2-me colloque hydraulique de Hambourg, avril 1985.
4. Mentzner F. Kennwerte der Dynamik sekundar geregelter Axialkolbeneinheiten. Dissertation. Universite militaire de RFA, Hambourg, 1985.
5. Kordak R. Sekundar geregelter hydrostatishe Antriebe. Journ. O + P, 1985, no. 9.
6. Schlosser W.M. Mathematical model for hydraulic power and motors. Hydraulic power transmission, 1961, vol. 7, no. 76, pp. 252-257.
7. Thoma J. Mathematical models and effective performance of hydraustatic mashines and transmission. Hydraulic and Pneumatic Power, 1969, November, pp. 642-651.
Математическая модель силовой части гидропривода с объемным регулированием
Силовая часть гидропривода с объемным регулированием состоит из исполнительного двигателя с поступательным или вращательным движением выходного звена и объемного насоса с изменяемой подачей. Чтобы познакомиться с особенностями математического описания процессов в гидродвигателях при неограниченном вращательном движении выходного звена, т. е. в гидромоторах, рассмотрим схему, изображенную на рис. 5.4, а. На схеме вал аксиально-поршневого гидромотора 1 соединен с нагрузкой 2. Рабочая жидкость поступает в гидромотор от аксиально-поршневого насоса 3, подача которого может изменяться как по величине, так и по направлению путем регулирования угла 7Н наклона шайбы. В соответствии со схемой движение жидкости происходит по замкнутому гидравлическому контуру, причем так, что у насоса либо верхняя гидролиния является напорной, а нижняя — всасывающей, либо наоборот. Для компенсации утечек жидкости предусмотрены клапаны 4, к которым подведена жидкость под давлением Рподп подпитки от вспомогательного насоса. Расходная характеристика этих клапанов приведена на рис. 5.4, б.
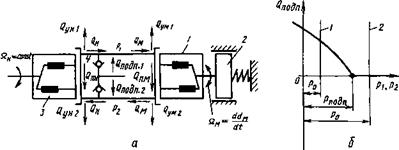
Рис. 5.4. Схема силовой части гидропривода с объемным регулированием (а) и характеристика (б) подпиточных клапанов
При давлении р то закрыты оба клапана (ро на прямой 2 рис. 5.4, б). В точке, для которой р = р2 = Рподп) характеристика имеет разрыв по первой производной и поэтому в данной точке не может быть линеаризована методом малых отклонений. С целью получения линейной математической модели силовой части гидропривода с объемным регулированием предположим, что при выбранном для исследования режиме работы привода (р = р2 = Ро на прямой I) клапаны открыты и соответственно
Фподп2 — &кл(Рподп «»Р2)) (5.51)
Где ккл — проводимость клапана.
Для момента времени, при котором вследствие малого отклонения шайбы насоса от среднего положения жидкость поступает из насоса в гидролинию с давлением р, а из гидролинии с давлением р2 уходит в насос, запишем следующие уравнения расходов:
Як — Ям + Яп. к + Яп. м +
“I» Яу. к 1 “I» Яу. м 1 “Ь Ясж1
Фн — Фм + Фп. н + Фп. м»“
Фу. н2 Фу. м2 Фсж2 «I» Фподп2* (5.53)
В уравнениях (5.52) и (5.53) расходы фСж1 и Фсж2 являются теми составляющими подачи фн насоса, которые связаны с сжимаемостью жидкости. Остальные составляющие фн, показанные на схеме (см. рис. 5.4, а) стрелками, учитывают расход фм, обеспечивающий вращение вала гидромотора, а также утечки и перетечки жидкости в насосе и гидромоторе. Уравнения упрощается, если насос и гидромотор имеют одинаковые размеры и изготовлены с одинаковыми допусками. В этом случае можно принять, что
Фп. н — фп. м — Фпер> Qy. nl — Фу. м1 — Фут1> Фу. н2
Фпер = ^пер(р1 Р2)) Фут1 = кутР1)
 » title=»Математическая модель силовой части гидропривода с объемным регулированием» align=»left» width=»91″ height=»120″ />Перечисленные составляющие фн определяют с помощью следующих соотношениий:
» title=»Математическая модель силовой части гидропривода с объемным регулированием» align=»left» width=»91″ height=»120″ />Перечисленные составляющие фн определяют с помощью следующих соотношениий:
Где дм = Ум/(2тг) — рабочий объем гидромотора, отнесенный к одному радиану угла поворота его вала; А? пер — проводимость зазоров, по которым в насосе и гидромоторе происходят перетечки жидкости из камер с высоким давлением в камеры с низким давлением; кут — проводимость зазоров в насосе и гидромоторе, по которым происходит утечка жидкости.
Предполагая, что гидролинии выполнены из трубопроводов с одинаковыми проходными сечениями и имеют одинаковую длину, а также считая стенки трубопроводов абсолютно жесткими, запишем
 Уо_
Уо_
Механика гидро — и пневмоприводов
Переходные процессы в гидро — и пневмоприводах
Показатели качества переходных процессов Системы с гидро — и пневмоприводами во время эксплуатации подвергаются как управляющим, так и возмущающим воздействиям, в результате которых происходят изменения состояния систем во времени. В …
Корректирование характеристик гидро — и пневмоприводов
Устойчивость следящих гидро — и пневмоприводов зависит, как было показано ранее, от ряда факторов. К таким факторам относятся силы трения, утечки и перетечки рабочей среды в устройствах гидро — и …
Автоколебания в управляющих устройствах гидро — и пневмоприводов
Управляющие устройства вместе с силовой частью гидро — и пневмопривода образуют динамические системы, которые, как сказано в § 6.1, должны, прежде всего, удовлетворять условиям устойчивости. Если математическая модель системы представлена …
Продажа шагающий экскаватор 20/90
Цена договорная
Используются в горнодобывающей промышленности при добыче полезных ископаемых (уголь, сланцы, руды черных и
цветных металлов, золото, сырье для химической промышленности, огнеупоров и др.) открытым способом. Их назначение – вскрышные работы с укладкой породы в выработанное пространство или на борт карьера. Экскаваторы способны
перемещать горную массу на большие расстояния. При разработке пород повышенной прочности требуется частичное или
сплошное рыхление взрыванием.
Вместимость ковша, м3 20
Длина стрелы, м 90
Угол наклона стрелы, град 32
Концевая нагрузка (max.) тс 63
Продолжительность рабочего цикла (грунт первой категории), с 60
Высота выгрузки, м 38,5
Глубина копания, м 42,5
Радиус выгрузки, м 83
Просвет под задней частью платформы, м 1,61
Диаметр опорной базы, м 14,5
Удельное давление на грунт при работе и передвижении, МПа 0,105/0,24
Размеры башмака (длина и ширина), м 13 х 2,5
Рабочая масса, т 1690
Мощность механизма подъема, кВт 2х1120
Мощность механизма поворота, кВт 4х250
Мощность механизма тяги, кВт 2х1120
Мощность механизма хода, кВт 2х400
Мощность сетевого двигателя, кВ 2х1600
Напряжение питающей сети, кВ 6
Более детальную информацию можете получить по телефону (063)0416788
Математические модели гидравлического привода с LS-управлением шагающей машины
(Mathematical models of hydrosystems with load sensing control for the walking machine
Preprint, Inst. Appl. Math., the Russian Academy of Science)
Боровин Г.К., Костюк А.В.
(G.K.Borovin, A.V.Kostyuk)
ИПМ им. М.В.Келдыша РАН
Москва, 2000
Работа выполнена при поддержке Российского фонда фундаментальных исследований (проекты №№ 00-15-96660, 98-01-00939)
Аннотация
Рассмотрены варианты схем гидросистем шагающей машины (ШМ), в которых используются насосы переменной производительности с LS-управлением. Для рассмотренных схем гидросистем приведены математические модели, описывающие процессы протекающие в гидросистемах.
Ключевые слова: шагающая машина, гидравлическая система, математическая модель.
Abstract
The variants of the schemes of hydrosystems for the walking machine are considered, in which the pumps of variable productivity with load sensing control are used. For the considered schemes the mathematical models circumscribing processes flowing past in them are indicated.
Key words: walking machine, hydraulic system, mathematical model.
Содержание
Введение
1. Анализ основных типов гидросхем ШМ
2. Математические модели гидропривода одной степени свободы
ноги ШМ при использовании насоса с LS -управлением
Введение
При создании гидравлической шагающей машины (ШМ) одной из главных задач, требующей своего решения, является выбор (проектирование) гидравлической системы. Это можно объяснить многими причинами и в частности энергетикой ШМ. Система управления (СУ) ШМ должна обеспечивать согласованное движение каждой из степеней подвижности ноги путем одновременного управления сервоприводами в шарнирах ног в зависимости от положения машины на местности, показаний датчиков информации, управляющих сигналов от водителя или верхних уровней СУ автоматической ШМ, а также характеристик опорной поверхности.. При этом должна учитываться специфика работы гидропривода при использовании его на автономной ШМ, а именно: жесткие массогабаритные ограничения; высокое быстродействие; ограниченная мощность приводного двигателя.
В работе рассмотрены несколько схем гидроприводов с объёмно-дроссельным регулированием, предназначенных для применения в системе управления ШМ. Дано описание рассматриваемых схем гидроприводов, приведены математические модели, описывающие процессы, протекающие в них.
Были рассмотрены варианты схем гидросистем, в которых используются насосы переменной производительности с LS -управлением ( load sensing control ). В качестве возможных вариантов были рассмотрены гидросхемы с одним насосом, работающем на все гидроцилиндры, с двумя насосами, каждый из которых работает на гидроцилиндры ног, составляющих одну «трешку» и схема с шестью насосами, по одному насосу на каждую ногу.
Математические модели гидравлического привода были составлены для шестиногой ШМ, имеющей следующие характеристики: полная масса 10000 кг, длина 7.5 м, ширина 3.6 м, высота 3.8 м., высота преодолеваемых препятствий до 1.5 м, максимальная скорость 0.6 м/с [1]. Расчетные нагрузки и скорости в степенях подвижности ноги при движении ШМ «трешками» приведены на рис.1 [1]. Схема ноги ШМ приведена на рис. 2 [1].
1. Анализ основных типов гидросхем ШМ
В качестве возможных вариантов гидросхем для применения на шестиногой ШМ рассмотрим основные типы гидроприводов, применяемых в машиностроении:
· Гидроприводы с дроссельным регулированием.
· Гидроприводы с объёмным регулированием.
· Гидроприводы с объёмно-дроссельным регулированием.
Гидроприводы с дроссельным регулированием здесь не будем рассматривать из–за их низкого к.п.д. Проект машины, для которой проводился анализ гидросхем, имеет 18 степеней свободы, каждая из которых управляется гидроцилиндром [1]. Так как скорости движения и нагрузки на каждую степень свободы в общем случае различны, то скорость каждого гидроцилиндра должна будет регулироваться при помощи электрогидравлического усилителя с дроссельным управлением. По оценкам [1] это приводит к большим потерям мощности, неудовлетворительному тепловому режиму, и, следовательно, к необходимости использовать приводной двигатель значительно большей мощности (500-600 кВт), чем мощность полезной нагрузки.
Гидроприводы с объёмным регулированием наряду с преимуществами, присущими этому типу, основным из которых является высокий к.п.д., при использовании их на шестиногой ШМ, имеют некоторые недостатки. Так как в приводе с объёмным регулированием изменение подачи производится путем изменения рабочего объёма насоса, то для управления скоростью одного гидроцилиндра необходимо использовать один регулируемый насос, т.е. для 18 независимых гидроцилиндров 18 регулируемых насосов. Это приводит к усложнению гидропривода, ухудшению массогабаритных характеристик конструкции ШМ. Быстродействие гидропривода с объёмным регулированием определяется временем, необходимым для изменения подачи насоса, которое может составить до нескольких десятых долей секунды. Кроме того, регулируемые машины более дороги и менее долговечны по сравнению с нерегулируемыми. Тем не менее схема гидропривода с объемным регулированием была применена на шестиногой шагающей машине ASV [3].
Уменьшение потерь и одновременно высокое быстродействие можно получить в гидроприводах с объёмно-дроссельным регулированием. В них регулируемые гидромашины применяются вместе с аппаратами, регулирующими расход рабочей жидкости.
В настоящее время в связи с увеличением энергонасыщения современных машин, большим количеством исполнительных механизмов (сельскохозяйственные, дорожно-строительные машины и т.д.) существует необходимость в насосных установках, способных работать на несколько потребителей. В таких случаях используются следующие типы насосов:
а) Насосы, работающие при постоянном давлении.
Их рабочая характеристика имеет вид:


 |
 Полезная мощность
Полезная мощность














 Потери
Потери




Этот тип насосов обеспечивает подачу рабочей жидкости равную расходу потребителя. При этом давление нагнетания остаётся постоянным и определятся усилием пружины регулятора.
б) Насосы с LS -управлением ( Load sensing — чувствительный к нагрузке) (рис.3).
Основной принцип LS -управления заключается в том, что угол наклона шайбы насоса и, следовательно, его производительность регулируются в зависимости от перепада давления на регулируемом дросселе (дросселирующем распределителе). Рабочая характеристика таких насосов, имеет вид:


 Полезная мощность
Полезная мощность
 |
 Потери на дросселе
Потери на дросселе







Устройство и принцип работы LS -регулятора
Регулятор подачи насоса состоит (рис.3) из распределителя Р3, двух гидроцилиндров управления ЦУ1, ЦУ2, пружины П, дросселя ДР. На левый торец золотника распределителя Р3 действует давление из линии нагнетания насоса, а на правый — давление в полости силового гидроцилиндра ЦС. Разность этих давлений равна перепаду давления на регулируемом дросселе РДР  . На правый торец золотника, кроме того, действует усилие от пружины. Если сила, возникающая под действием перепада давления на регулируемом дросселе,
. На правый торец золотника, кроме того, действует усилие от пружины. Если сила, возникающая под действием перепада давления на регулируемом дросселе,  меньше силы предварительного поджатия пружины золотника распределителя Р3, то золотник находится в крайнем левом положении. При этом он соединяет полость ЦУ2 со сливом. Под действием пружины П и давления в линии нагнетания насоса, действующего на поршень ЦУ1, шайба насоса отклонена на максимальный угол, обеспечивая максимальную подачу насоса.
меньше силы предварительного поджатия пружины золотника распределителя Р3, то золотник находится в крайнем левом положении. При этом он соединяет полость ЦУ2 со сливом. Под действием пружины П и давления в линии нагнетания насоса, действующего на поршень ЦУ1, шайба насоса отклонена на максимальный угол, обеспечивая максимальную подачу насоса.
Если необходимо уменьшить скорость исполнительного гидроцилиндра, то уменьшают площадь проходного сечения регулируемого дросселя. При этом начнет увеличиваться давление насоса, и следовательно, перепад давления на дросселе РДР  . Как только сила, вызванная этим перепадом давления, превысит силу предварительного поджатия пружины, золотник распределителя Р3 начнет двигаться вправо постепенно соединяя линию нагнетания насоса с полостью гидроцилиндра управления ЦУ2. Под действием давления, поршень гидроцилиндра ЦУ2 начнет двигаться, преодолевая усилие пружины П и силы давления в ЦУ1. По мере выдвижения штока гидроцилиндра ЦУ2 угол наклона шайбы начнет уменьшаться, снижая при этом подачу насоса, а, следовательно, и перепад давления на дросселе РДР. Из-за уменьшения величины
. Как только сила, вызванная этим перепадом давления, превысит силу предварительного поджатия пружины, золотник распределителя Р3 начнет двигаться вправо постепенно соединяя линию нагнетания насоса с полостью гидроцилиндра управления ЦУ2. Под действием давления, поршень гидроцилиндра ЦУ2 начнет двигаться, преодолевая усилие пружины П и силы давления в ЦУ1. По мере выдвижения штока гидроцилиндра ЦУ2 угол наклона шайбы начнет уменьшаться, снижая при этом подачу насоса, а, следовательно, и перепад давления на дросселе РДР. Из-за уменьшения величины  пружина золотника распределителя Р3 начнет возвращать его в исходное положение, перекрывая канал, соединяющий линию нагнетания насоса и гидроцилиндра ЦУ2. Когда силы, действующие на золотник, уравновесят друг друга, движение прекратится и он займет положение, при котором небольшое количество жидкости будет проходить через его щель из линии нагнетания насоса через дроссель ДР в полость гидроцилиндра ЦУ2 и далее через канал в поршне на слив, поддерживая тем самым давление, необходимое для удержания шайбы насоса в промежуточном равновесном состоянии. Подача насоса при этом будет соответствовать расходу, необходимому для обеспечения заданной скорости исполнительного гидроцилиндра и будет равна пропускной способности дросселя РДР.
пружина золотника распределителя Р3 начнет возвращать его в исходное положение, перекрывая канал, соединяющий линию нагнетания насоса и гидроцилиндра ЦУ2. Когда силы, действующие на золотник, уравновесят друг друга, движение прекратится и он займет положение, при котором небольшое количество жидкости будет проходить через его щель из линии нагнетания насоса через дроссель ДР в полость гидроцилиндра ЦУ2 и далее через канал в поршне на слив, поддерживая тем самым давление, необходимое для удержания шайбы насоса в промежуточном равновесном состоянии. Подача насоса при этом будет соответствовать расходу, необходимому для обеспечения заданной скорости исполнительного гидроцилиндра и будет равна пропускной способности дросселя РДР.
Если необходимо увеличить скорость движения гидроцилиндра, то увеличивают проходное сечение дросселя РДР. При этом перепад давления на нем уменьшается и золотник распределителя Р3 смещается вправо, открывая канал, соединяющий гидроцилиндр ЦУ2 со сливом. Под действием пружины и силы давления в гидроцилиндре ЦУ1 шайба насоса начнет отклоняться в сторону увеличения угла наклона, увеличивая при этом подачу. Перепад давления, при котором начинает двигаться золотник распределителя Р3, выбирается обычно в пределах 1.4-2.5 МПа и регулируется путем настройки силы предварительного поджатия пружины.
Максимальная подача выбирается таким образом, чтобы обеспечить наибольшую требуемую скорость движения выходного звена гидродвигателя при максимальном проходном сечении дросселя. Направляющий распределитель Р служит для реверса силового гидроцилиндра. Клапан «ИЛИ» необходим для определения большего давления в силовом гидроцилиндре СЦ, которое служит для управления LS -золотника распределителя Р3.
Таким образом, как видно из приведенных выше рассуждений, насосы с LS -регулированием обеспечивают достаточно высокий к.п.д привода. Это можно объяснить тем, что они производят подачу рабочей жидкости равную потребностям гидродвигателя, а давление, развиваемое насосом, равно давлению нагрузки в силовом цилиндре за вычетом потерь на регулируемом дросселе, которые сравнительно невелики (1.4-2.5 МПа).
На рис.4 показана принципиальная схема насоса, в котором кроме LS -регулирования используется также ограничитель давления ОГД, выполняющий функции предохранительного клапана. Рабочая характеристика такого насоса при рабочем давлении меньшем чем давление срабатывания ОГД (35.0 МПа) будет соответствовать рабочей характеристике насоса с LS -управлением. Как только давление достигнет величины, равной
35.0 МПа, золотник ОГД соединит линию нагнетания насоса с ЦУ2 и шайба насоса займет нулевое положение, при котором подача рабочей жидкости будет равняться величине внутренних утечек в насосе.
Одним из вариантов LS -управления являются насосы с ограничителем мощности (рис.5). Они используются для избежания перегрузок и остановок приводного двигателя. Принцип действия ограничителя мощности заключается в том, чтобы поддерживать мощность, потребляемую насосом на постоянном уровне в независимости от изменения давления.
Таким образом, можно сделать вывод, что наиболее подходящим для применения на шестиногой шагающей машине является гидропривод с объемно-дроссельным регулированием с использованием насоса с LS -управлением и ограничителем давления.
На рис.6 представлена схема использования насоса с LS -управлением и ограничителем давления для управления одноштоковым гидроцилиндром.
Регулирующая аппаратура
Для регулирования скорости движения исполнительных гидроцилиндров можно применить:
— дросселирующие гидрораспределители с пропорциональным управлением и электрической обратной связью по положению золотника (рис.7);
— двухкаскадные электрогидравлические усилители с электрической обратной связью по положению золотника.
В связи с тем, что в последнее время в мировой практике имеется тенденция к более широкому применению пропорциональной техники, поэтому мы остановим свой выбор на двухкаскадном распределителе с пропорциональным управлением.
Принцип работы пропорционального распределителя
Пропорциональный распределитель (рис.7) состоит из пилотного золотника ПЗ, основного золотника ОЗ, электромагнита ЭМ и датчиков положения этих золотников ДОС.
Функционирование распределителя с пропорциональным управлением можно описать следующим образом. Рабочая жидкость под давлением поступает по каналам к основному и пилотному золотникам. При отсутствии электрического сигнала на катушках пропорционального магнита пилотный золотник находится в нейтральном положении и расход жидкости в каналах управления отсутствует. При подаче напряжения на катушки электромагнита происходит смещение пилотного золотника. Одна из камер управления основного золотника соединяется с линией высокого давления, а другая со сливом. Под действием возникшего перепада давления происходит смещение золотника в сторону камеры с меньшим давлением. При этом сигнал с датчиков обратной связи вычитается из входного сигнала, тем самым уменьшая входное напряжение на обмотках электромагнита. При уменьшении напряжения на обмотках электромагнита, пружины пилотного золотника начнут возвращать его в исходное положение, перекрывая тем самым каналы управления основного золотника, что приведет к его остановке.
Для возвращения основного золотника в нулевое положение необходимо изменить знак входного напряжения, при котором пилотный золотник сместится в противоположную сторону и в управляющих полостях возникнет перепад давлений, в результате которого основной золотник возвращается к исходному состоянию.
Обратные связи по положению золотников служат для улучшения динамических характеристик распределителя и уменьшения петли гистерезиса.
Исполнительные гидроцилиндры
В качестве исполнительных двигателей в ШМ можно использовать: двухштоковые гидроцилиндры, одноштоковые гидроцилиндры, гидроцилиндры с фальшштоком.
Применение двухштоковых гидроцилиндров усложняет компоновку ноги. Если исходить из соображений компактности ноги, то наиболее приемлемым является вариант с одноштоковым гидроцилиндром. Но этому типу двигателя присущ существенный недостаток, который заключается в необходимости подавать разные объёмы рабочей жидкости при движении гидроцилиндра в противоположных направлениях. Этого недостатка можно избежать, если применить дифференциальную схему подключения гидроцилиндра, которая заключается в том, что при движении в направлении штока обе полости гидроцилиндра соединяются с напорной линией, а при движении в противоположном направлении штоковая полость продолжает соединяется с напорной линией, а поршневая соединяется со сливом (рис.7).
Если выбрать соотношение площадей поршня и штока, как F п=2 F шт, то в таком случае можно обеспечить равные расходы жидкости при прямом и обратном ходах поршня гидроцилиндра.
На рис.6 представлена принципиальная схема гидропривода с использованием насоса с LS -регулированием, дифференциального гидроцилиндра и пропорционального распределителя.
При смещении распределителя ПР вправо линия нагнетания насоса соединяется с поршневой полостью силового гидроцилиндра ЦС. Под действием давления поршень цилиндра начинает двигаться вправо, при этом рабочая жидкость из штоковой полости не пойдет на слив, так как обратный клапан КО1 не пропустит её, а попадет снова в напорную линию насоса. Так как отношение площадей поршневой и штоковой полостей равно 2/1, то подача насоса будет такой же как и при соединении линии нагнетания со штоковой полостью.
Возможные варианты схем
В качестве возможных схем гидропривода с использованием насосов с LS -управлением рассмотрим следующие варианты:
— Один насос подаёт рабочую жидкость для приводов одной ноги (всего 6 насосов) (рис.8).
— Один насос подает рабочую жидкость ко всем 18 исполнительным
— Так как основным режимом движения машины является походка «трешками», то привода, принадлежащие к одной «трешке», движутся одинаково относительно корпуса и, следовательно имеют близкие по величине нагрузки и скорости. Поэтому можно использовать один насос для гидроцилиндров, принадлежащих к одной «трешке». Движение разных «трешек» отличаются только сдвигом времени на половину периода движения машины (рис. 10);
— Один насос подаёт рабочую жидкость к гидроцилиндрам одинаковых степеней свободы, принадлежащие к одной «трешке», т.е. к приводам бедер, голеней, поворотов стоек (6 насосов).
Выбор рабочего давления
Так как количество различного гидрооборудования, размещенного на ШМ достаточно велико, то с целью улучшения массогабаритных характеристик следует использовать более высокое рабочее давление. В настоящее время многие фирмы производители оборудования для гидроприводов используют рабочее давление 350 атм. В связи с этим предполагается в качестве рабочего давления в гидроприводе шагающей машины использовать давление в 350 атм.
Рабочие площади гидроцилиндров выбираем с учетом максимальных нагрузок и величины давления, исходя из нагрузок, которые должны будут преодолевать гидропривода каждой степени свободы .
Литература
1. Д.Е.Охоцимский Е.А.Девянин, А.К.Платонов, Г.К.Боровин, В.М.Буданов, В.В.Лапшин, В.М.Мирный. Основные проблемы и особенности проектирования многоцелевого гидравлического шагающего шасси. Препринт ИПМ РАН №72, 1995г, 28с.
2. G.K.Borovin Computer Simulation of Hydraulic Control System of the Walking Machine. Proceedings 2 nd Tampere Intern. Conf. on Machine Automat, ICMA’98, p.p. 179-192.
3. Г.К.Боровин Математическое моделирование гидравлической системы управления шагающей машины. Препринт ИПМ РАН №106, 1995г., 28с.
4. Waldron K.J., Vohnout V.J., Pery A., Mcghee R.B. Configuration design of the adaptive suspension vehicle. International journal of robotics research. 1984, №2.
5. Pugh D.R., Ribble E.A., Vohnout V.J., Bihari T.E., Walliser T.M., Patterson M.R., Waldron K.J. Techical descripshion of the adaptive suspension vehicle. International journal of robotics research, 1990, №2, 24-42.
6. Nair S.S., Singh R., Waldron K.J., Vohnout V.J. Power system of a multi- legged walking robot. Robotics and autonomous systems, 1992, №9, 149-163.
7. Sutherland I.E., Uliner M.C. Footprints in the asphalt. International journal of robotics research, 1984, №2.
8. Боровин Г.К., Костюк А.В. Математическое моделирование систем управления шагающих машин. Тезисы докл. Научно-техн. конф.»Гидромашины, гидроприводы и гидропневмо-автоматика», Москва, МГТУ им.Н.Э.Баумана, 1999г., с.с. 8-9