Динамика полета — это наука о законах движения летательных аппаратов (в данном случае — самолета). Основная задача динамики полета- выявление закона движения самолета под действием заданных сил и моментов (или определение системы сил и моментов, необходимой для реализации заданного закона движения). Другой весьма важной задачей динамики полета является определение закона движения самолета, обеспечивающего экстремальное (максимальное или минимальное) значение какого-либо параметра (максимальной дальности полета, минимального времени выхода заданную точку и т. п.). При изучении Курс основ динамики полета обычно делят на два раздела. В первом разделе изучают законы движения центра тяжести самолета, т. е. законы движения самолета как материальной точки. В этом случае силы, действующие на самолет, приложены в центре тяжести его, а моменты внешних сил уравновешены. Во втором разделе рассматривают движение самолета как твердого тела. При этом изучают общий случай движения тела с учетом, как перемещения центра тяжести, так и вращения относительно его под действием моментов внешних сил. В этом разделе исследуют моменты, приложенные к самолету, и характер движения его. Основные положения динамики полета самолета как науки были разработаны в работах Н. Е. Жуковского по аэродинамике и авиации. В работе «О парении птиц»(1891 г.) он анализирует условия выполнения полета и различные траектории движения при различных положениях центра тяжести. Среди рассмотренных траекторий была траектория вида «мертвой петли». Практические выводы, сделанные Н. Е. Жуковским, подтвердил П. Н. Нестеров, впервые в мире совершивший петлю в вертикальной плоскости («петля Нестерова»). В разработке методов расчета неустановившихся движений самолета большое значение имели работы одного из учеников Н. Е. Жуковского В. П. Ветчинкина «Динамика полета самолета» (1933 г.), а также В. С. Пышнова, А. Н. Журавченко, Б. Т. Горощенко и других советских ученых. Решению проблем динамики переменной массы посвящены труды К. Э. Циолковского и И. В. Мещерского.
СИЛЫ, ДЕЙСТВУЮЩИЕ НА САМОЛЕТ В ПОЛЕТЕ.ВИДЫ ДВИЖЕНИЯ САМОЛЕТА
Величина и направление скорости движения самолета зависят от величины и направления внешних сил, действующих на него. Эти силы являются результатом воздействия на самолет воздушной среды, массы воздуха, отбрасываемой двигателем, и массы Земли. В результате взаимодействия самолета с воздушной средой появляются аэродинамические силы. Воздух, отбрасываемый двигателем, вызывает появление силы тяги. Сила веса самолета есть результат действия на него массы Земли.
Таким образом, на летящий самолет действуют силы веса G, аэродинамическая R и тяги Р двигателя (см. рисунок ниже). Сила веса G приложена в центре тяжести самолета и направлена по радиусу к центру тяжести Земли. Аэродинамическая сила R приложена в центре давления. В общем случае она может быть заменена тремя составляющими: подъемной силой Y, силой лобового сопротивления К и боковой силой Z. Сила Y направлена перпендикулярно к вектору скорости, сила X — по касательной к траектории движения, а боковая сила Z — по нормали к плоскости сил Y и X. Силы Y и X лежат в плоскости симметрии самолета.

Сила тяги двигателя Р, как правило, действует в плоскости симметрии самолета. Она может иметь две составляющие: Рх — проекция на касательную к траектории движения и Ру — проекция на нормаль к траектории (см.рисунок ниже).

Ввиду малого значения составляющей Ру принимают, что сила тяги Р направлена по касательной к траектории движения самолета.
В первом разделе динамики полета принимают моменты всех сил относительно центра тяжести самолета уравновешенными. Поэтому все внешние силы можно приложить в центре тяжести самолета. В дальнейшем будут рассмотрены различные виды движений самолета под действием внешних сил R, Р и G, приложенных в его центре тяжести. Все силы, направленные параллельно вектору скорости, называются продольными, а перпендикулярно к вектору скорости — поперечными. Сила веса G может быть или продольной (отвесное пикирование), или поперечной (горизонтальный полет),или иметь продольные и поперечные составляющие (планирование, подъем самолета). Сила тяги может тоже иметь как продольную, так и поперечную составляющую (Рх и Ру).В каждый момент самолет при движении имеет вполне определенные величину и направление скорости. Если направление скорости со временем не изменяется, то полет самолета будет прямолинейным, в противном случае — криволинейным. Если при этом сохраняется величина скорости, то движение самолета будет равномерным. При увеличении скорости движение самолета будет ускоренным, при уменьшении — замедленным. Движение самолета с положительным ускорением называется разгоном, а с отрицательным ускорением — торможением. Следует заметить, что величина и направление скорости еще не дают полной характеристики полета. Поэтому чаще полет самолета характеризуется понятием «режим полета». Под режимом полета самолета понимают не только величину и направление скорости, но и высоту полета, характер траектории, ускорение и другие параметры движения. Ранее указывалось, что вид движения самолета определяется величиной и направлением равнодействующих продольных и поперечных сил. Если равнодействующая продольных сил направлена вперед, то движение самолета ускоренное. Сама сила является ускоряющей. Если эта сила направлена назад, то движение самолета будет замедленным (торможение) Таким образом, продольные силы влияют на изменение величины скорости движения самолета
Так как равнодействующая поперечных сил R направлена вдоль радиуса кривизны траектории, то она является центростремительной силой. Эта сила искривляет траекторию движения в сторону своего действия. Векторы скорости V и поперечной силы Rп могут лежать в одной плоскости (плоскость криволинейного
 движения) и в разных плоскостях. В последнем случае траектория движения будет пространственной (спираль, боевой разворот и другие виды движения).
движения) и в разных плоскостях. В последнем случае траектория движения будет пространственной (спираль, боевой разворот и другие виды движения).
УРАВНЕНИЯ ДВИЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА
Из механики известно, что движение свободного тела в пространстве можно представить состоящим из поступательного движения его центра тяжести и вращения тела относительно центра тяжести. В первом разделе динамики самолета рассматривается только движение центра тяжести. Поэтому уравнения, связывающие внешние силы с ускорениями, которые они сообщают самолету, составляются только для движения его центра тяжести (центра масс). Эти уравнения назвали уравнениями движения центра тяжести самолета. Они используются для определения количественных характеристик полета самолета и их качественного анализа.

Любое движение центра тяжести самолета можно разложить на движения его по трем взаимно перпендикулярным осям. Так как движение самолета рассматривается относительно воздушной среды, то уравнения движения центра тяжести изучаются относительно так называемой поточной или скоростной системы координат. За начало координат в этой системе принимают центр тяжести самолета (точка О). Ось Ох направляют по вектору скорости (по касательной к траектории движения). Ось Оу располагают в вертикальной плоскости перпендикулярно к вектору скорости, а ось Oz — перпендикулярно к плоскости хОу. Положительное направление осей показано на рисунке.

Система координат подвижная, перемещается вместе с самолетом, однако система не позволяет построить траекторию движения, а отражает лишь связь ускорения с внешними силами. При рассмотрении вопросов, связанных с вращением самолета относительно его центра тяжести, удобнее пользоваться так называемой связанной системой координат. Эта система позволяет любое вращательное движение заменить вращением относительно трех взаимно перпендикулярных осей, проходящих через центр тяжести (см. рисунок):

— продольная ось самолета Ох, расположенная в плоскости симметрии самолета параллельно корневой (центральной) хорде крыла;
— путевая, или вертикальная, ось самолета Оу, расположенная в плоскости симметрии самолета и перпендикулярная к продольной оси;
— поперечная ось самолета Oz, перпендикулярная к плоскости хОу.
Моменты внешних сил относительно оси Ох называются поперечными Мх, относительно оси Оz – путевыми Му и относительно оси Oz — продольными Mz.
Угол γ у поворота самолета относительно оси Ох называется углом крена. Угол β поворота самолета относительно оси Оу называется углом рыскания. И, наконец, угол  поворота самолета относительно оси Oz называется углом атаки. Положительное направление вращения определяется по правилу «буравчика», ввинчиваемого по положительному направлению той или иной оси (по направлению движения часовой стрелки). Связанная система координат используется при изучении вопросов балансировки, устойчивости и управляемости самолета. Выразим уравнения движения центра тяжести самолета в скоростной (поточной) системе координат. Обозначим проекции равнодействующей внешних сил на оси координат соответственно через Fx, Fy и, проекции ускорений — через ji, jy и jz и массу самолета через mс-та . Тогда второе уравнение механики F= mс-та j проекциях на оси координат выразится в следующем виде:
поворота самолета относительно оси Oz называется углом атаки. Положительное направление вращения определяется по правилу «буравчика», ввинчиваемого по положительному направлению той или иной оси (по направлению движения часовой стрелки). Связанная система координат используется при изучении вопросов балансировки, устойчивости и управляемости самолета. Выразим уравнения движения центра тяжести самолета в скоростной (поточной) системе координат. Обозначим проекции равнодействующей внешних сил на оси координат соответственно через Fx, Fy и, проекции ускорений — через ji, jy и jz и массу самолета через mс-та . Тогда второе уравнение механики F= mс-та j проекциях на оси координат выразится в следующем виде:



Ускорение  , направленное по касательной к траектории движения, называют тангенциальным или продольным. Оно характеризует только изменение величины скорости. При > 0 происходит разгон самолета, при
, направленное по касательной к траектории движения, называют тангенциальным или продольным. Оно характеризует только изменение величины скорости. При > 0 происходит разгон самолета, при  Х), или замедленным (Р 2 ,
Х), или замедленным (Р 2 ,
r — радиус кривизны траектории, м.
Предыдущее равенство можно преобразовать в следующее:
 ,
,
Из этой формулы следует, что при больших скоростях в горизонтальном полете подъемная сила меньше веса самолета. При скорости V =  подъемная сила горизонтального полета равна нулю. Эта скорость получила название первой космической скорости. Самолет в данном случае будет двигаться по траектории искусственного спутника Земли. Первая космическая скорость для земных условий составляет 7900 м/сек. Если полет самолета происходит с небольшими скоростями, подъемная сила мало отличается от веса самолета. Так, например, при скорости полета V = 2500 км/час подъемная сила меньше веса самолета всего на 1%. Это позволяет при анализе горизонтального полета современных самолетов считать, что Y=G.
подъемная сила горизонтального полета равна нулю. Эта скорость получила название первой космической скорости. Самолет в данном случае будет двигаться по траектории искусственного спутника Земли. Первая космическая скорость для земных условий составляет 7900 м/сек. Если полет самолета происходит с небольшими скоростями, подъемная сила мало отличается от веса самолета. Так, например, при скорости полета V = 2500 км/час подъемная сила меньше веса самолета всего на 1%. Это позволяет при анализе горизонтального полета современных самолетов считать, что Y=G.
Потребная скорость горизонтального полета
При горизонтальном полете на данном угле атаки должно быть выполнено равенство Y=G. Известно, что каждому углу атаки соответствует вполне определенное значение cy. Для обеспечения равенства Y = G данному углу атаки должна соответствовать и вполне определенная величина скорости на заданной высоте полета. Скорость полета, необходимая для создания подъемной силы, равной весу самолета на данном угле атаки, называется п о т р е б н о й с к о р о с т ь ю г о р и з о н т а л ь н о г о п о л е т а.
Потребная скорость горизонтального полета зависит от угла атаки полета, т. е. су, от высоты полета, т. е.  , и от удельной нагрузки на крыло
, и от удельной нагрузки на крыло  . С ростом углов атаки до α = αкр увеличивается коэффициент су. Потребная скорость горизонтального полета при этом уменьшается. На критическом угле атаки, при котором cу = cуmax потребная скорость горизонтального полета достигает минимального значения. Эта скорость получила название м и н и м а л ь н о т е о р е т и ч е с к о й .
. С ростом углов атаки до α = αкр увеличивается коэффициент су. Потребная скорость горизонтального полета при этом уменьшается. На критическом угле атаки, при котором cу = cуmax потребная скорость горизонтального полета достигает минимального значения. Эта скорость получила название м и н и м а л ь н о т е о р е т и ч е с к о й .
Практически полет на критических углах атаки не производится. При полете на α = αкр из-за сильного срыва воздушного потока с крыла, возможно сваливание самолета на крыло или на нос. Приближение к критическому углу атаки обнаруживается в полете по тряске самолета. После начала тряски угол атаки увеличивать опасно.
С целью обеспечения безопасности полета наибольшая допустимая величина су должна быть меньше cуmax. Скорость полета, когда коэффициент подъемной силы cу равен коэффициенту подъемной силы при тряске cу доп называется м и н и м а л ь н о д о п у с т и м о й.
За минимально допустимую скорость иногда принимают так называемую с к о р о с т ь с в а л и в а н и я или с р ы в а . Скорость, при которой происходит непроизвольное сваливание самолета на крыло или на нос, называется скоростью сваливания или скоростью срыва.
Так же, чем больше удельная нагрузка на крыло, тем больше потребная скорость горизонтального полета. У современных самолетов несущие способности крыльев малые, а удельные нагрузки на крыло повышенные (500-600 кГ/м 2 ). Поэтому потребные минимальные скорости горизонтального полета их имеют большое значение (200-300 км/час). С подъемом на высоту из-за
уменьшения массовой плотности воздуха ρ потребная скорость горизонтального полета увеличивается.
Потребная тяга горизонтального полета
Из условия постоянства скорости в горизонтальном полете следует, что должно быть равенство силы тяги Р и силы лобового сопротивления X.
Тяга, необходимая для уравновешивания лобового сопротивления самолета при полете на данной скорости (угле атаки), называется п о т р е б н о й т я г о й г о р и з о н т а л ь н о г о п о л е т а Рг.п..
Выясним факторы, влияющие на потребную тягу горизонтального полета. Каждому углу атаки полета соответствует вполне определенное аэродинамическое качество самолета.

Максимальное качество самолета соответствует наивыгоднейшему углу атаки. На этом угле атаки потребная тяга минимальна. На меньших и больших углах атаки потребная тяга будет больше. Так как каждому углу атаки соответствует определенная скорость (число М), то потребная тяга зависит от скорости (числа М) полета.
Разберем характер зависимости потребной тяги горизонтального полета от скорости для определенного веса самолета и высоты полета. С ростом скорости полета угол атаки становится меньше. Качество самолета до α = αнаив увеличивается, а на больших углах атаки уменьшается. Поэтому потребная тяга с ростом скорости, до скорости, соответствующей α = αнаив уменьшается, а при больших скоростях увеличивается. На рисунке представлен график, показывающий зависимость потребной тяги горизонтального полета от скорости, который назвали кривой Жуковского. Потребная тяга горизонтального полета зависит также от веса самолета и высоты полета. При полете на данном угле атаки с ростом веса самолета потребная тяга увеличивается.

Физически это означает, что для горизонтального полета более тяжелого самолета требуется большая подъемная сила. Это достигается увеличением потребной скорости. При увеличении последней растет сила лобового сопротивления X и как результат потребная тяга горизонтального полета. Это приводит к смещению всех точек кривой потребной тяги в сторону больших скоростей и тяг.
С увеличением высоты при постоянном угле атаки потребная скорость горизонтального полета увеличивается, а потребная тяга остается постоянной.

С подъемом на высоту вследствие уменьшения скорости звука увеличивается число М. Оно может оказаться больше Мкр. При полетах на М > Мкр возникает волновой кризис, появляется волновое сопротивление. Аэродинамическое качество самолета при том же су будет уменьшаться. Это приводит к интенсивному росту потребной тяги на V > Vкр.

ВЗЛЕТ И ПОСАДКА
Динамика полета как раздел аэромеханики рассматривает вопросы, связанные с реализацией различных траекторий полета самолета, которые определяются техническим заданием на проектирование. Для самолетов различного назначения различна и так называемая номенклатура режимов полета, однако для всех самолетов общими являются режимы взлета и посадки.
Взлет — это ускоренное движение самолета с момента страгивания на линии старта до момента одновременного достижения регламентируемых в техническом задании высоты и безопасной скорости взлета, обеспечивающих безопасность полета на участке начального набора высоты.
В конце разбега самолет достигает скорости отрыва, при которой можно безопасно оторвать самолет от земли и продолжать взлет. На высоте Н = 400 м уже должны быть убраны шасси, взлетно-посадочная механизация, двигатели переведены на режим крейсерского полета и самолет начинает полет по маршруту.
Взлет самолета состоит из следующих этапов: разбега, отрыва и разгона с подъемом.
Разбегом самолета называется ускоренное движение его по земле (воде), необходимое для набора скорости, при которой происходит безопасный отрыв. Разбег является равноускоренным движением самолета.

Минимальная скорость безопасного отделения самолета от земли (воды) называется скоростью отрыва.
Разгон с подъемом есть ускоренный прямолинейный полет с малым углом подъема до безопасной высоты 25 м.
Момент отделения самолета от земли (воды) называют отрывом
Расстояние от начала разбега до набора высоты 25 м называется взлетной дистанцией.
Расстояние от начала разбега до отрыва называется длиной разбега. Она определяет длину взлетно-посадочной полосы.
Основными характеристиками взлета являются
· длина взлетной дистанции.
На самолет при разбеге действуют сила веса G, аэродинамические силы X и Y, тяга силовой установки Р.
УРАВНЕНИЯ ДВИЖЕНИЯ ЦЕНТРА МАСС САМОЛЕТА В ЧАСТНЫХ СЛУЧАЯХ_
Уравнения движения центра масс самолета, рассмотренные выше, описывают полет по пространственным траекториям и являются достаточно сложными для анализа и использования на этапе проектирования нового летательного аппарата. Однако полет любого самолета состоит из отдельных этапов, для которых полные уравнения движения избыточны и могут быть упрощены без снижения общности описания траектории движения. Рассмотрим частные случаи уравнений движения самолета.
Упрощенные уравнения пространственною движения центра масс самолета. Анализ пространственного движения самолета с быстрым вращением вокруг продольной оси ОХ связанной системы координат или оси ОХа скоростной системы координат показывает, что на коротких временных интервалах с приемлемой для практики точностью можно пренебречь влиянием гравитационной составляющей и изменения массы на траекторные переменные, а скорость полета считать постоянной по величине. К таким маневрам относятся «бочки», перевороты через крыло и т.д. В этом случае в основном представляют интерес значения углов атаки и скольжения. Поэтому упрощенные уравнения пространственного движения центра масс самолета в проекциях на оси скорости скоростной системы координат ОХаУаХа примут вид

Эти уравнения совместно с уравнениями (1.20) применяются для анализа характеристик устойчивости и управляемости самолета в пространственном движении.
Уравнения движения центра масс самолета в вертикальной плоско — сти. Полет в вертикальной плоскости возможен, если сумма проекций сил на ось (Т2ГК траекторной системы координат равна нулю. Пусть угол скольжения и угол крена равны нулю: р = 0; у = 0. Тогда скоростной угол крена уа =0, боковая аэродинамическая сила Za =0, угловые скорости вращения самолета вокруг осей ОХ и О У связанной системы координат также равны нулю: со, =0; со, =0, углы тангажа, наклона траектории и атаки связаны кинематическим соотношением О = 0+а.
С учетом этих условий выражения для перегрузок в скоростной системе координат примут вид 
Учитывая взаимосвязь проекций перегрузок в скоростной и в связанной системах координат, получим

Подставляя эти выражения в уравнения (1.29), получим уравнения движения самолета в вертикальной плоскости в проекциях на оси различных систем координат. Эти уравнения имеют следующий вид.
В связанной системе координат ОХ УХ

К уравнениям (1.32) необходимо добавить кинематическое уравнение изменения угла тангажа

В этом случае кинематические уравнения (1.15) для вычисления текущей дальности и высоты полета примут вид

С учетом уравнения (1.16), определяющего изменение массы самолета, получим систему дифференциальных уравнений движения центра масс самолета шестого порядка.
В скоростной системе координат ОХаУ„Ха 

С учетом уравнения изменения массы самолета (1.16), как и в предыдущем случае, получим систему дифференциальных уравнений шестого порядка.

Кинематические дифференциальные уравнения, определяющие положение самолета в пространстве, примут вид

К уравнениям (1.30), (1.31) необходимо добавить кинематическое дифференциальное уравнение, определяющее угол тангажа

а также уравнение изменения массы самолета (1.16).
Уравнения движения цен гра масс в горизонтальной плоскости. Полет в горизонтальной плоскости выполняется при соблюдении условий для траекторных переменных 0=0 или Н = const. При движении в горизонтальной плоскости в общем случае вращение самолета осуществляется вокруг всех осей связанной системы координат, так что сод. ф 0, со,. ф0, ел. 5*0. Полет самолета в горизонтальной плоскости возможен как с креном: у ф 0 и без скольжения: р = 0; без крена: у = 0 и со скольжением: р ф 0 и в общем случае с креном: у ф 0 и скольжением: р ф 0. Самолет может выполнять полет на постоянной или переменой скорости. Рассмотрим уравнения движения самолета в каждом из перечисленных случаев при дополнительных условиях: углы атаки, скольжения и тангажа малы. В этом случае угол крена и скоростной угол крена совпада- ют: у = у „. Кроме того, в указанных условиях можно принять, что

Из общих уравнений пространственного движения самолета (1.21) в проекциях на оси траекторией системы координат ОХк УКХК получим упрощенные уравнения движения центра масс с креном: у *0 и со скольжением: р ^0

Уравнения (1.36) дают возможность записать уравнения движения самолета в горизонтальной плоскости для следующих случаев полета.
Полет с креном и без скольжения. Силы, действующие на самолет, показаны на рис. 1.14. В этом случае у„ * 0, р = 0, п1а = 0. Уравнения (1.36) принимают вид

Из второго уравнения системы (1.37) следует, что изменение угла пути ‘Р обусловлено проекцией подъемной силы на горизонтальную плоскость. Последнее уравнение выражает равенство проекции подъемной силы на вертикальную плоскость весу самолета (условие полета в горизонтальной плоскости). Так как 0 = 0 и р = 0, то ось ОХа =ОХк лежит в плоскости симметрии самолета, а угол между осью подъемной силы ОУа и осью ОУк приближенно равен углу крена у. Режим полета самолета, на котором р = 0; пы =0, называется координированным виражом. Если скорость самолета на вираже остается постоянной, то вираж называется установившимся правильным

Рис. 1.14. Схема сил, действующих на самолет в полете с креном и без скольжения
виражом. Уравнения движения центра масс самолета на правильном вираже имеют вид

Таким образом, на правильном вираже нормальная скоростная перегрузка определяется углом крена:

и с увеличением угла крена возрастает.
Полет без крена и со скольжением. Аэродинамические силы, действующие на самолет при выполнении плоского разворота, показаны на рис. 1.15. В этом случае у = 0, р ф 0, п1а ф 0. Уравнения (1.36) принимают вид
Уравнения (1.40) показывают, что изменение угла пути NK обусловлено боковой аэродинамической силой Zа. Последнее выражение в (1.40) отражает равенство веса и подъемной силы. Такой режим полета называется плоским разворотом самолета. Если скорость полета VK = const, то имеет место установившийся плоский разворот, уравнения для которого имеют вид


Рис. 1.15. Схема сил, действующих на самолет в полете без крена и со скольжением
ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ ДВИЖЕНИЯ САМОЛЕТА
В случае анализа динамики самолета, совершающего полет со скоростью, значительно меньшей орбитальной, уравнения движения по сравнению с общшм случаем полета летательного аппарата [13] могут быть упрощены, в частности, можно пренебречь вращением и сферичностью Земли. Кроме этого сделаем еще ряд упрощающих допущений.
Будем считать, что самолет представляет собой абсолютно жесткое тело. Влияние упругости конструкции будем учитывать
только квазистатически, для текущего значения скоростного напора.
Будем считать, что масса и моменты инерции самолета на рассматриваемых интервалах времени неизменны и соответствуют исходному состоянию равновесного полета.
Будем считать, что конфигурация самолета имеет плоскость симметрии и что массы распределены симметрично по отношению к этой плоскости.
При анализе устойчивости и управляемости самолета будем использовать следующие прямоугольные правые системы осей координат.
Нормальная земная система координат OXgYgZg. Эта система осей координат имеет неизменную ориентацию относительно Земли. Начало координат совпадает с центром масс (ЦМ) самолета. Оси 0Xg и 0Zg лежат в горизонтальной плоскости. Их ориентация может быть принята произвольно, в зависимости от целей решаемой задачи. При решении навигационных задач ось 0Xg часто направляют к Северу параллельно касательной к меридиану, а ось 0Zg направляют на Восток. Для анализа устойчивости и управляемости самолета удобно принять направление ориентации оси 0Xg совпадающим по направлению с проекцией вектора скорости на горизонтальную плоскость в начальный момент времени исследования движения. Во всех случаях ось 0Yg направлена вверх по местной вертикали, а ось 0Zg лежит в горизонтальной плоскости и образует вместе с осями OXg и 0Yg правую систему осей координат (рис. 1.1). Плоскость XgOYg называют местной вертикальной плоскостью.
Связанная система координат OXYZ. Начало координат расположено в центре масс самолета. Ось ОХ лежит в плоскости симметрии и направлена вдоль линии хорд крыла (либо параллельно какому-либо другому, фиксированному относительно самолета направлению) к носовой части самолета. Ось 0Y лежит в плоскости симметрии самолета и направлена вверх (при горизонтальном полете), ось 0Z дополняет систему до правой.
Углом атаки а называется угол между продольной осью самолета и проекцией воздушной скорости на плоскость OXY. Угол положителен, если проекция воздушной скорости самолета на ось 0Y отрицательна.
Углом скольжения р называется угол между воздушной скоростью самолета и плоскостью OXY связанной системы координат. Угол положителен, если проекция воздушной скорости на поперечную ось положительна.
Положение связанной системы осей координат OXYZ относительно нормальной земной системы координат OXeYgZg может быть полностью определено тремя углами: ф, #, у, называемыми углами. Эйлера. Последовательно поворачивая связанную систему
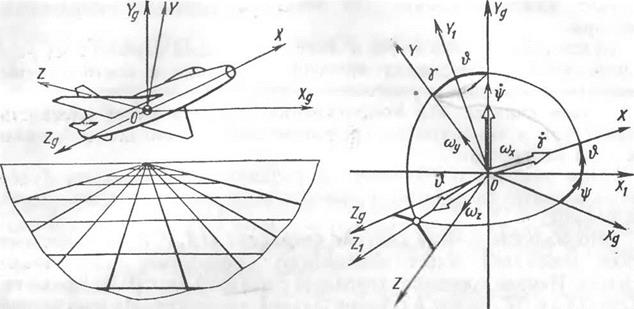
Рис. 1.L Нормальная земная OXgYgZg и связанная OXYZ системы координат Рис, 1.2, Углы Эйлера, используемые при исследовании динамики самолетов
координат на каждый из углов Эйлера, можно прийти к любому угловому положению связанной системы относительно осей нормальной системы координат.
При исследовании динамики самолетов используются следующие понятия углов Эйлера.
Угол рыскания г]) — угол между некоторым исходным направлением (например, осью 0Xg нормальной системы координат) и проекцией связанной оси самолета на горизонтальную плоскость. Угол положителен, если ось ОХ совмещается с проекцией продольной оси на горизонтальную плоскость поворотом вокруг оси OYg по часовой стрелке.
Угол тангажа # — угол между продольно# осью самолета ОХ и местной горизонтальной плоскостью OXgZg, Угол положителен, если продольная ось находится выше горизонта.
Угол крена у — угол между местной вертикальной плоскостью, проходящей через ось ОХ у и связанной осью 0Y самолета. Угол положителен, если ось О К самолета совмещается с местной вертикальной плоскостью поворотом вокруг оси ОХ по часовой стрелке. Углы Эйлера могут быть получены последовательными поворотами связанных осей относительно нормальных осей. Будем считать, что нормальная и связанная системы координат в начале совмещены. Первый поворот системы связанных осей произведем относительно оси О на угол рыскания г]; (ф совпадает с осью OYgXрис. 1.2)); второй поворот —относительно оси 0ZX на угол Ф (‘& совпадает с осью OZJ и, наконец, третий поворот произведем относительно оси ОХ на угол у (у совпадает с осью ОХ). Проектируя векторы ф, Ф, у, являющиеся составляющими
вектора угловой скорости движения самолета относительно нормальной системы координат, на связанные оси, получим уравнения связи между углами Эйлера и угловыми скоростями вращения связанных осей:
со2 = ф cos у — ф cos Ф sin у.
При выводе уравнений движения центра масс самолета необходимо рассматривать векторное уравнение изменения количества движения
где ю — вектор скорости вращения связанных с самолетом осей;
R — главный вектор внешних сил, в общем случае аэродинами-
ческих сил и тяги; G — вектор гравитационных сил.
Из уравнения (1.2) получим систему уравнений движения ЦМ самолета в проекциях на связанные оси:
°ixVz) = Ry + G!!’ (1 -3)
т iy’dt “Ь У — = Rz + Gz>
где Vx, Vy, Vz — проекции скорости V; Rx, Rz — проекции
результирующих сил (аэродинамических сил и тяги); Gxi Gyy Gz — проекции силы тяжести на связанные оси.
Проекции силы тяжести на связанные оси определяются с использованием направляющих косинусов (табл. 1.1) и имеют вид:
Gy = — G cos ft cos у; (1.4)
GZ = G cos d sin y.
При полете в атмосфере, неподвижной относительно Земли, проекции скорости полета связаны с углами атаки и скольжения и величиной скорости (V) соотношениями
Vх = V cos a cos р;
 Vу = — V sin a cos р;
Vу = — V sin a cos р;