Тема:«Векторно-матричные модели систем управления в непрерывном времени»
Понятие пространства состояний
Современная теория автоматического управления оперирует с векторно-матричными моделями динамических систем. При этом рассматриваются в общем случае многомерные системы, т.е. системы произвольного порядка со многими входами и многими выходами, в связи, с чем широко используются векторно-матричные уравнения и аппарат векторной алгебры. Для получения векторно-матричной модели (ВММ) исследуемая динамическая система представляется в виде “черного ящика” с некоторым числом входных и выходных каналов (рис. 1.1, а).
Рис.1.1. Скалярное (а) и векторное (б) представления динамической системы в виде «черного ящика»
Все переменные, характеризующие систему, можно разделить на три группы.
1. Входные переменные или входные воздействия, генерируемые системами, внешними по отношению к исследуемой системе. Они характеризуются вектором входа.
r — число входов
2. Выходные переменные, характеризующие реакцию системы на указанные входные воздействия. Представляются вектором выхода
m — число выходов.
3. Промежуточные переменные, характеризующие внутреннее состояние системы, — переменные состояния, представляются вектором
n — число переменных состояния.
Таким образом, совокупность входов можно рассматривать как один обобщенный вход, на который воздействует вектор входа u, совокупность выходов как вектор y, а совокупность промежуточных координат, характеризующих состояние системы, — в виде вектора состояния x (см. рис. 1.1, б).
Состояние системы — это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно.
Собственно система, ее входы и выходы — это три взаимосвязанных объекта, которые в каждой конкретной ситуации определяются соответственно математической моделью системы, заданием множеств входных и выходных переменных.
Решение задач анализа и синтеза связано с исследованием состояний системы, множество которых образует пространство состояний,.
Векторно-матричные модели в непрерывном времени
В общем случае динамическая система в непрерывном может быть описана парой матричных уравнений:
где F — n-мерная вектор-функция системы; Q — m-мерная вектор-функция выхода.
Матричное уравнение (1.1) называют уравнением состояния системы. Его решение, удовлетворяющее начальному условию , дает вектор состояния системы
Матричное уравнение (1.2), определяющее выходные переменные в зависимости от x(t) и u(t), называют уравнением выхода.
В частном случае зависимости могут быть линейными комбинациями переменных состояния xi и входных переменных uq. При этом динамическая система описывается в векторно-матричной форме:
Переход к стационарным моделям позволяет оперировать с коэффициентными матрицами, т.е. со стационарными уравнениями
А — функциональная матрица размером n x n, называемая матрицей состояния системы (объекта);
В — функциональная матрица размером n x r, называемая матрицей управления (входа);
С — функциональная матрица размером m x n, называемая матрицей выхода по состоянию;
D — функциональная матрица размером m x r, называемая матрицей выхода по управлению.
Очень часто D=0, т.е. выход непосредственно не зависит от входа.
В дальнейшем под векторно-матричной моделью объекта (системы) будем понимать описание ее динамического поведения в классе стационарных непрерывных линейных систем, представленное в виде уравнений (1.6), (1.7).
Таким образом, ВММ имеет единую форму представления, что значительно облегчает алгоритмизацию и компьютерную реализацию проектных процедур и проектных операций структурно-параметрического синтеза и анализа систем управления. Однако с использованием ВММ может быть получено лишь приближенное проектное решение, которое потребует дальнейшего уточнения, так как такие модели отображают динамическое поведение реального объекта лишь в классе стационарных линейных систем.
Построение ВММ реального объекта сопряжено с проблемами линеаризации исходного математического описания и приведения его к структурированному виду — форме Коши.
Если мы знаем физическое описание системы и можем записать уравнения, описывающие поведения ее отдельных частей, то получить уравнения состояния системы обычно сравнительно не трудно. Покажем эту процедуру на нескольких примерах.
Пример 1.1. Получим уравнения состояния для простейшей RLC-цепи, показанной на рис 1.2.
Динамическое поведение этой системы при полностью определяется, если известны начальные значения и входное напряжение U(t) при . Следовательно, можно выбрать в качестве переменных состояния, то есть
Для указанных переменных состояния можно записать дифференциальные уравнения
или в векторно-матричной форме
Таким образом для рассматриваемой системы матрицы А, В, С векторно-матричной модели будут иметь следующий вид:
Пример 1.2. На рис. 1.3. показан электродвигатель постоянного тока независимого возбуждения, работающий при постоянном магнитном потоке (Ф=const).
Дифференциальные уравнения для такого объекта могут быть записаны относительно следующих переменных состояния: — скорости вращения ротора, тока якоря i(t), углового перемещения ротора . При использовании знакомых зависимостей для электродвижущей силы и вращающего момента двигателя получим уравнение электрической цепи
и уравнения вращающейся части
где J – приведенный момент инерции электродвигателя.
Представляя векторы состояния, входа и выхода как получим следующую векторно-матричную модель электродвигателя постоянного тока
То есть для рассматриваемой системы матрицы А, В, С векторно-матричной модели будут иметь следующий вид:
Пример1.3. Построим векторно-матричную модель электромеханического объекта — электропривода постоянного тока, приводящего в движение через механический редуктор тяжелую платформу. Функциональная схема такого объекта приведена на рис. 1.4.
Здесь легко выделить три функциональных элемента, соответствующие трем видам преобразования энергии:
двигатель, выполняющий преобразование электрической энергии в механическую, — электромеханический преобразователь;
механизм, осуществляющий передачу механической энергии от вала двигателя через редуктор к рабочему органу — платформе.
При использовании общеизвестных допущений [5] и обозначений координат и параметров такого объекта его динамическое поведение при МС=0 описывается следующей системой линейных дифференциальных уравнений:
Если компонентами вектора состояния выбрать , где Uп – напряжение преобразователя, iя — ток электродвигателя, — скорость вращения электродвигателя, МУ — момент упругости механизма, — скорость вращения механизма, то элементы векторно-матричной модели
принимают следующий вид:
После подстановки реальных значений параметров объекта, которые приведены в табл. 1.1, компоненты матриц состояния А и управления В принимают вид (1.13).
На рис. 1.5. приведено окно редактирования векторно-матричной модели (1.13) в среде Компьютерного комплекса функционального проектирования динамических систем.
1. Какие переменные при построении математического описания системы принято называть
a) входными переменными;
b) выходными переменными;
c) переменными состояния?
2. Математическое описание объекта с одним входом и одним выходом представлено структурной схемой, содержащей q элементов, представленных передаточной функцией общего вида
Как в этом случае можно определить размерность пространства состояния для описания этого объекта?
3. Математическое описание объекта с двумя входами и одним выходом y(t) представлено следующим уравнением в операторной форме
Какова в этом случае будет размерность пространства состояния n для описания этого объекта?
4. Выберите из приведенных ниже записей возможные формы представления уравнения состояния для непрерывных систем.
5. Объект управления имеет r – входов, m — выходов, его математическое описание в непрерывном времени содержит n дифференциальных уравнений первого порядка. Какова в этом случае будет размерность матрицы состояния?
6. Сформируйте векторно-матричную модель фильтра, электрическая схема которого представлена на рис. 1.6.
Здесь следует учесть, что
объект имеет один вход — U1 один выход — iH; все параметры электрической схемы R1, R2, L, C1, C2, RH известны и являются постоянными;
могут быть использованы следующие обозначения
7.При составлении математического описания динамических процессов в упругом электромеханическом объекте, влючающем в себя электродвигатель постоянного тока независимого возбуждения (Ф=const) и механизм, модель которого представляется двухмассовой системой (см. пример 1.3), могут быть использованы следующие переменные:
iя — ток электродвигателя,
— скорость вращения электродвигателя,
Му – упругий момент механизма,
— скорость вращения механизма,
— угол поворота ротора электродвигателя,
l – линейное перемещение механизма.
Какие из этих переменных, и в какой последовательности включены в состав вектора состояния приведенной ниже векторно-матричной модели?
ОТВЕТЫ
a) переменные, характеризующие реакцию системы на входные воздействия;
b) переменные, генерируемые системами, внешними по отношению к исследуемой системе;
c) промежуточные переменные, характеризующие внутреннее состояние системы.
Видео:Уравнение состояния идеального газа | Физика 10 класс #33 | ИнфоурокСкачать
Пространство состояний в задачах проектирования систем оптимального управления
Введение
Исследование системы управления во временной области с помощью переменных состояния широко используется в последнее время благодаря простоте проведения анализа.
Состоянию системы соответствует точка в определённом евклидовом пространстве, а поведение системы во времени характеризуется траекторией, описываемой этой точкой.
При этом математический аппарат включает готовые решения по аналоговому и дискретному LQR и DLQR контролерам, фильтра Калмана, и всё это с применением матриц и векторов, что и позволяет записывать уравнения системы управления в обобщённом виде, получая дополнительную информацию при их решении.
Целью данной публикации является рассмотрение решения задач проектирования систем оптимального управления методом описания пространства состояний с использованием программных средств Python.
Теория кратко
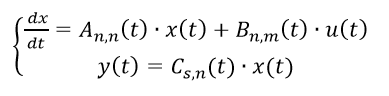
Векторно-матричная запись модели линейного динамического объекта с учетом уравнения измерения принимает вид:
(1)
Если матрицы A(t), B(t) и C(t) не зависят от времени, то объект называется объектом с постоянными коэффициентами, или стационарным объектом. В противном случае объект будет нестационарным.
При наличии погрешностей при измерении, выходные (регулируемые) сигналы задаются линеаризованным матричным уравнением:
(2)
где y(t) – вектор регулируемых (измеряемых) величин; C(t) – матрица связи вектора измерений с вектором состояний; v(t) – вектор ошибок измерений (помехи).
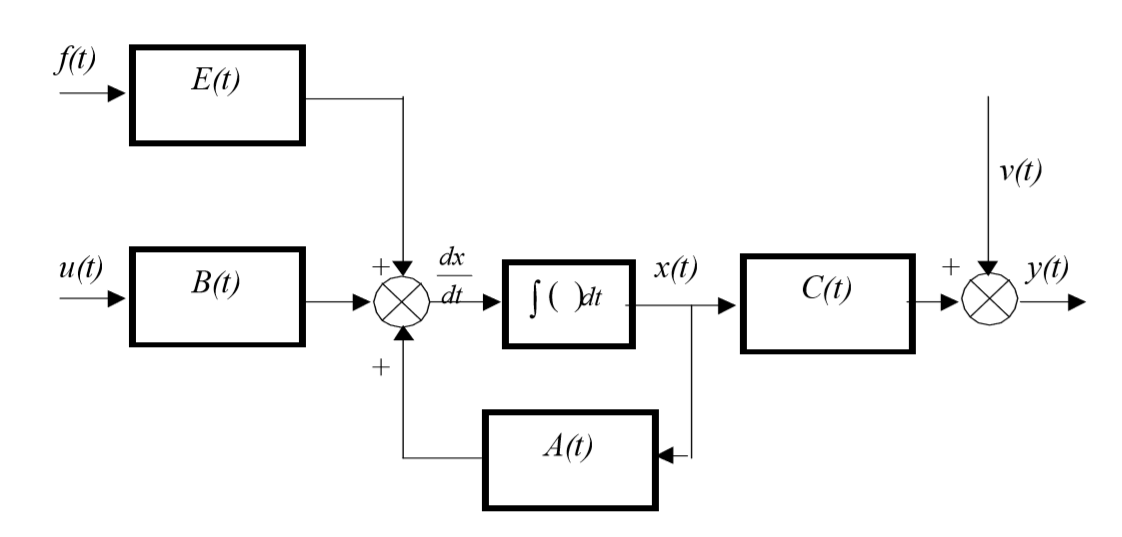
Структура линейной непрерывной системы, реализующая уравнения (1) и (2), приведена на рисунке:
Данная структура соответствует математической модели объекта, построенной в пространстве состояний его входных x(t), u(t), выходных y(t) и внутренних, или фазовых координат x(t).
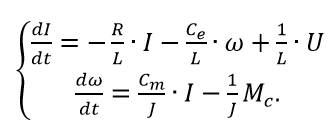
Для примера рассмотрим математическую модель двигателя постоянного тока с независимым возбуждением от постоянных магнитов. Система уравнений электрической и механической частей двигателя для рассматриваемого случая будет выглядеть так:
(3)
Первое уравнение отражает взаимосвязь между переменными в цепи якоря, второе — условия механического равновесия. В качестве обобщенных координат выберем ток якоря I и частоту вращения якоря ω.
Управлением являются напряжение на якоре U, возмущением — момент сопротивления нагрузки Mc. Параметрами модели являются активное сопротивление и индуктивность цепи и якоря, обозначенные соответственно Rя, и Lя, а также приведенный момент инерции J и конструктивные постоянные се и см (в системе СИ: Cе=См).
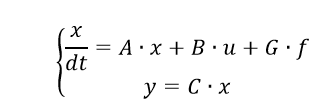
Разрешая исходную систему относительно первых производных, получим уравнения двигателя в пространстве состояний.
(4)
В матричном виде уравнения (4) примут вид (1):
(5)
где вектор обобщенных координат , вектор управлений U =u (в рассматриваемом случае он является скаляром), вектор (скаляр) возмущений Mc=f. Матрицы модели:
(6)
Если в качестве регулируемой величины выбрать частоту вращения, то уравнение измерения запишется в виде:
(7)
а матрица измерений примет вид:
Сформируем модель двигателя в Python. Для этого вначале зададим конкретные значения параметров двигателя: U = 110 В; R =0,2 Ом; L = 0,006 Гн; J =0,1 кг/м2;Ce =Cm=1,3 В/С и найдем значения коэффициентом матриц объекта из (6).
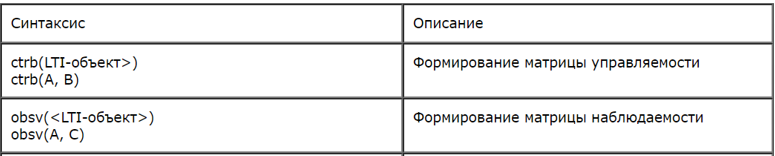
Разработка программы формирующей модель двигателя с проверкой матриц на наблюдаемость и управляемость:
При разработке программы использовалась специальная функция def matrix_rank для определения ранга матрицы и функции, приведенные в таблице:
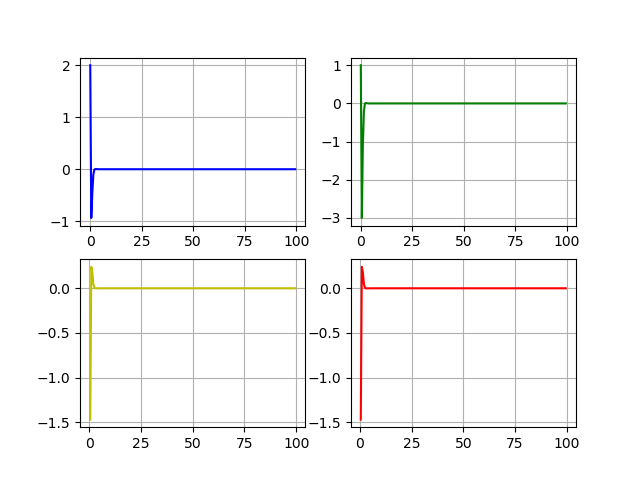
1. На примере двигателя постоянного тока с независимым магнитным возбуждением рассмотрена методика проектирования управления в пространстве состояний;
2. В результате работы программы получены передаточная функция, переходная характеристика, а так же ранги матриц управляемости и наблюдаемости. Ранги совпадают с размерностями пространства состояний, что подтверждает управляемость и наблюдаемость модели.
Пример проектирования оптимальной системы управления с дискретным dlqr контролером и полной обратной связью
Определения и терминология
Линейно-квадратичный регулятор (англ. Linear quadratic regulator, LQR) — в теории управления один из видов оптимальных регуляторов, использующий квадратичный функционал качества.
Задача, в которой система описывается линейными дифференциальными уравнениями, а показатель качества, представляет собой квадратичный функционал, называется задачей линейно-квадратичного управления.
Широкое распространение получили линейно-квадратичные регуляторы (LQR) и линейно-квадратичные гауссовы регуляторы (LQG).
Приступая к практическому решению задачи всегда нужно помнить об ограничениях
Для синтеза оптимального дискретного регулятора линейных стационарных систем нужна функция численного решения уравнения Беллмана.Такой функции в библиотеке Python Control Systems [1] нет, но можно воспользоваться функцией для решения уравнения Риккати, приведенной в публикации [2]:
Но нужно ещё учесть ограничения на синтез оптимального регулятора, приведенные в [3]:
система, определяемая матрицами (A, B) должна быть стабилизируема;
должны выполняться неравенства S> 0, Q – N/R–N.T>0, пара матриц (Q – N/R–N.T, A – B/R–B.T) не должна иметь наблюдаемые моды с собственными значениями на действительной оси.
После копаний в обширной и не однозначной теории, которую, по понятным причинам, я не привожу, задачу удалось решить, и все ответы можно прочитать прямо в комментариях к коду.
Структурная схема регулятора системы управления с обратной связью по всем переменным состояния изображена на рисунке:
Для каждого начального состояния x0 оптимальный линейный регулятор порождает оптимальное программное управление u*(x, k) и оптимальную траекторию х*(k).
Программа, формирующая модель оптимального управления с dlqr контролером
Отдельные задачи оптимального управления по типу приведенных можно решать средствами Python, комбинируя возможности библиотек Python Control Systems, SciPy,NumPy, что, безусловно, способствует популяризации Python, учитывая, что ранее такие задачи можно было решать только в платных математических пакетах.
Видео:Физика 10 класс (Урок№20 - Уравнение состояния идеального газа. Газовые законы.)Скачать
Уравнения состояния
При решении некоторых задач теории автоматического управления удобнее представлять дифференциальное уравнение объекта (5.1) или дифференциальные уравнения системы (5.4) и (5.6) в виде совокупности дифференциальных уравнений первого порядка. Не умаляя общности, рассмотрим эти уравнения применительно к управляемому объекту.
Пусть объект описывается дифференциальным уравнением n-го порядка (5.1)
называемых переменными состояния и представим уравнение (5.70) в виде системы дифференциальных уравнений
устанавливается алгебраическим уравнением
Обычно уравнения (5.71) и (5.72) записываются в векторпо-матричной форме:
— матрицы-столбцы. Матрицу-столбец-
могут иметь неодинаковые размерности.
В выборе переменных состояния имеется определенная свобода. Важно только, чтобы они были независимыми. От того, как выбраны переменные, зависит форма уравнений (5.73) и (5.74), т. е. вид входящих в них матриц.
При нормальной форме уравнений состояния в качестве переменных состояния выбираются сама управляемая величина п- 1 ее производные:
т. с. когда оно имеет вид
Достоинством нормальной формы является то, что переменные состояния имеют ясный физический смысл, а некоторые из них (например, хих2 и х:]) могут быть непосредственно измерены датчиками различных типов.
Для получения уравнений состояния в канонической форме уравнение объекта (5.70) представляется в виде
Если корни рь Ръ-Рп полинома С0(р) действительные однократные, то правая часть (5.80) может быть представлена в виде суммы элементарных дробей:
где К; и ()г- — коэффициенты разложения.
В качестве неременных состояния выбираются слагаемые суммы (5.81):
Большим достоинством канонической формы является диагоиальиость матрицы Л , что существенно упрощает решение уравнения (5.73). Основной недостаток ее состоит в том, что переменные состояния не имеют ясного физического смысла, в результате чего возникает проблема их непосредственного измерения.
Существуют и другие способы выбора переменных состояния, которые здесь не рассматриваются.
Решение векторно-матричиого уравнения (5.73) может быть представлено в виде
Здесь оно без строгого доказательства построено по аналогии с решением линейного дифференциального уравнения 1-го порядка
общий интеграл которого, как известно, определяется но формуле
называется переходной или фундаментальной матрицей. Если уравнения состояния представлены в канонической форме, то матрица А диагональная и имеет вид (5.85). Тогда
При других формах уравнений состояния для определения фундаментальной матрицы можно использовать известные способы нахождения матричных функций, например, теоремы Кели—Гамильтона или Сильвестра. Можно также использовать формулу
—
При необходимости можно осуществить обратный переход от уравнений состояния к передаточным функциям объекта. Для этого уравнение (5.73) запишем в изображениях по Лапласу:
получается формула (5.88). Из уравнения
(5.74) с учетом (5.89) найдем изображение управляемой величины при нулевых начальных значениях:
При описании свойств объекта уравнениями состояния возникают две проблемы, нетипичные для случая, когда используется одно дифференциальное уравнение я-то порядка. Эти проблемы рассматриваются в следующем параграфе.
📽️ Видео
Уравнение состояния идеального газа. 10 класс.Скачать
Уравнения прямой на плоскости | Векторная алгебраСкачать
Вектор. Сложение и вычитание. 9 класс | МатематикаСкачать
Урок 156. Уравнение состояния идеального газа. Квазистатические процессыСкачать
Уравнение состояния идеального газа. Практическая часть. 10 класс.Скачать
 r — число входов
r — число входов m — число выходов.
m — число выходов. n — число переменных состояния.
n — число переменных состояния. .
.
 , дает вектор состояния системы
, дает вектор состояния системы
 могут быть линейными комбинациями переменных состояния xi и входных переменных uq. При этом динамическая система описывается в векторно-матричной форме:
могут быть линейными комбинациями переменных состояния xi и входных переменных uq. При этом динамическая система описывается в векторно-матричной форме:

 полностью определяется, если известны начальные значения
полностью определяется, если известны начальные значения  и входное напряжение U(t) при
и входное напряжение U(t) при  можно выбрать в качестве переменных состояния, то есть
можно выбрать в качестве переменных состояния, то есть 

 — скорости вращения ротора, тока якоря i(t), углового перемещения ротора
— скорости вращения ротора, тока якоря i(t), углового перемещения ротора  . При использовании знакомых зависимостей для электродвижущей силы
. При использовании знакомых зависимостей для электродвижущей силы  и вращающего момента двигателя
и вращающего момента двигателя  получим уравнение электрической цепи
получим уравнение электрической цепи
 получим следующую векторно-матричную модель электродвигателя постоянного тока
получим следующую векторно-матричную модель электродвигателя постоянного тока
 , где Uп – напряжение преобразователя, iя — ток электродвигателя,
, где Uп – напряжение преобразователя, iя — ток электродвигателя,  — скорость вращения электродвигателя, МУ — момент упругости механизма,
— скорость вращения электродвигателя, МУ — момент упругости механизма,  — скорость вращения механизма, то элементы векторно-матричной модели
— скорость вращения механизма, то элементы векторно-матричной модели
 для описания этого объекта?
для описания этого объекта? и одним выходом y(t) представлено следующим уравнением в операторной форме
и одним выходом y(t) представлено следующим уравнением в операторной форме

 — угол поворота ротора электродвигателя,
— угол поворота ротора электродвигателя, приведенной ниже векторно-матричной модели?
приведенной ниже векторно-матричной модели?


 (1)
(1) (2)
(2)
 (3)
(3) (4)
(4) (5)
(5) , вектор управлений U =u (в рассматриваемом случае он является скаляром), вектор (скаляр) возмущений Mc=f. Матрицы модели:
, вектор управлений U =u (в рассматриваемом случае он является скаляром), вектор (скаляр) возмущений Mc=f. Матрицы модели: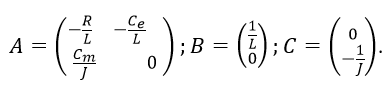 (6)
(6) (7)
(7)




 называемых переменными состояния и представим уравнение (5.70) в виде системы дифференциальных уравнений
называемых переменными состояния и представим уравнение (5.70) в виде системы дифференциальных уравнений
 устанавливается алгебраическим уравнением
устанавливается алгебраическим уравнением

 — матрицы-столбцы. Матрицу-столбец-
— матрицы-столбцы. Матрицу-столбец- могут иметь неодинаковые размерности.
могут иметь неодинаковые размерности.
 т. с. когда оно имеет вид
т. с. когда оно имеет вид









 называется переходной или фундаментальной матрицей. Если уравнения состояния представлены в канонической форме, то матрица А диагональная и имеет вид (5.85). Тогда
называется переходной или фундаментальной матрицей. Если уравнения состояния представлены в канонической форме, то матрица А диагональная и имеет вид (5.85). Тогда

 —
—

 получается формула (5.88). Из уравнения
получается формула (5.88). Из уравнения