Рассмотрим силовой расчет кривошипно-ползунного механизма компрессора.
Исходными данными являются:
- 1) кинематическая схема механизма;
- 2) массы и моменты инерции звеньев, положение их центров масс (mvJxs, mvJ2S, тъ);
- 3) угловая скорость cot и угловое ускорение г] звена 1
- 4) сила сопротивления, приложенная к поршню F3;
- 5) силы тяжести всех звеньев.
Установим последовательность выполнения силового расчета.
Для рассматриваемого положения механизма записываем векторные уравнения скоростей и ускорений, строим планы скоростей (а) и ускорений (б) (рис. 9.4). Далее определяем значения главных векторов сил инерции (Ф , Ф )
и главных моментов сил инерции (Мф^ М т :




После определения F x решаем векторное уравнение (9.5′) 21 
Задавшись масштабом ц строим план сил
(рис. 9.7) для уравнения (9.5′).

Определяем угловую координату ф2| силы F.n, замерив ее от положительного направления оси х.
Рассмотрим равновесие звена 3 (рис. 9.8).
Из условия равновесия звена 3 определяем






После этого рассматриваем равновесие кривошипа (рис. 9.9) и определяем силу Fu (рис. 9.10), угловую координату срм и момент МдУ
Примеры на силовой расчет механизма.
Пример 1. Провести силовой (статический) расчет кривошипно-ползунного механизма компрессора (рисунок 3.11), данного в положении, когда угол φ1= 45 о . Исходные данные. Длины звеньев в м: ℓАВ = 0,1, ℓВС = 0,4. Нагрузка на звенья механизма: к звену АВ в точке S1 приложена сила Р1=400 Н, она направлена вдоль звена АВ, расстояние ℓАS1 = 0,02 м; к звену ВС приложена сила Р2=600 Н, она направлена под углом φ2=60 о к линии ВС и приложена к точке S2; расстояние ℓВS2 = 0,1 м. К этому же звену приложен момент М2=8 Нм; к звену 3 приложена сила Р3=1000 Н, она направлена параллельно линии Ах и линия ее действия проходит через точку С. Уравновешивающий момент Мур приложен к звену 1.
Определить. Реакцию R43 (Н) в поступательной кинематической паре С, которая направлена перпендикулярно линии Ах и проходит через точку С; реакцию R23 (Н) во вращательной кинематической паре С; реакцию R12 (Н) во вращательной кинематической паре В; реакцию R41 (Н) во вращательной кинематической паре А и уравновешивающий момент Мур (Нм), приложенный к звену 1.
Решение. 1). Вычерчиваем механизм в масштабе μℓ
Построение механизма рассмотрено в п.2.1, §4, Примеры 1, 4.
Рассчитываем расстояния до точек приложения сил
 ,
, 
и прикладываем силы согласно заданию.
Так как расчет является статическим, то планы скоростей и ускорений строить не надо (рисунок 3.11, а).
2). Все внешние силы, действующие на звенья механизма, заданы. Поэтому и этот этап расчета выполнен.
3). Уравновешивающий момент Мур по условию приложен к звену 1, поэтому ведущим звеном следует считать звено 1.
4). От механизма может быть отделена только одна группа Ассура, состоящая из звеньев 2 и 3. Эта группа относится ко второму классу второму виду (рисунок 3.11, б).
5). Силовой расчет структурной группы 2-3. Изображаем структурную группу 2-3 в масштабе μℓ и в том же положении, что и построенная схема механизма. Составляем уравнение равновесия по первому уравнению из системы (3.17)
 .
.
В этом уравнении содержится три неизвестные: величина и направление реакции R12 и величина реакции R43. Для того чтобы его решить, т.е. построить план сил группы, необходимо реакцию R12 разложить на две составляющие: на тангенциальную реакцию  , направленную перпендикулярно звену ВС; и на нормальную реакцию
, направленную перпендикулярно звену ВС; и на нормальную реакцию  , направленную параллельно линии ВС. Тогда уравнение равновесия примет вид
, направленную параллельно линии ВС. Тогда уравнение равновесия примет вид
 (3.19)
(3.19)
Величину реакции определим из уравнения равновесия по второму уравнению системы (3.17)


Построение плана сил проводится по уравнению (3.19) в масштабе μР=20 Н/мм. На свободном поле чертежа отмечаем точку а и от нее откладываем реакцию в виде отрезка [аb]
От точки b откладываем силу Р2 в виде отрезка  Далее от точки с откладываем силу Р3 в виде отрезка
Далее от точки с откладываем силу Р3 в виде отрезка  Через точку а проводим прямую, параллельную звену ВС. Это будет линия действия силы . Через точку d проводим прямую, перпендикулярную линии Ах – линия действия реакции R43. Точка е – пересечение этих прямых.
Через точку а проводим прямую, параллельную звену ВС. Это будет линия действия силы . Через точку d проводим прямую, перпендикулярную линии Ах – линия действия реакции R43. Точка е – пересечение этих прямых.
Отрезок [ае] в масштабе μР дает искомую реакцию , отрезок [dе] – реакцию R43, а отрезок [bе] – реакцию R12. Действительные величины этих реакции определяться
Для нахождения реакции R32 составим уравнение равновесия звена 2
 (3.20)
(3.20)
Из плана сил (рисунок 3.11, в) видно, что отрезок [се] в масштабе μР дает искомую реакцию R32.
Реакция R43 должна проходить через точку С, т.к. к ползуну 3 приложены три силы, две из которых (R32 и Р3) проходят через эту точку.
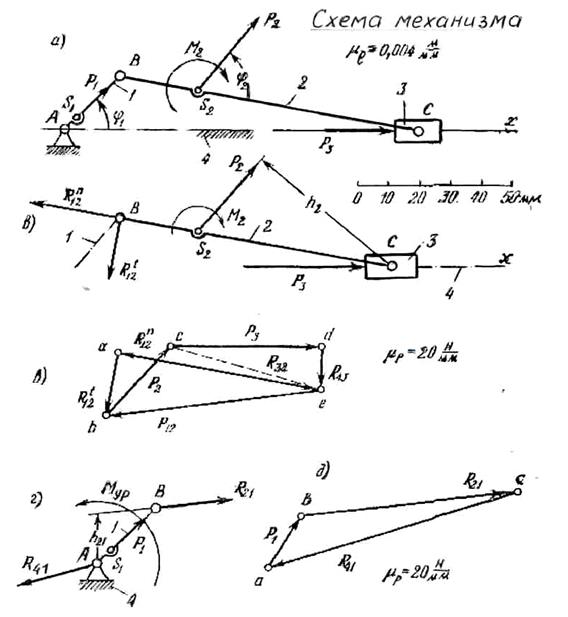
Рисунок 3.11. – Силовой расчет кривошипно-ползунного
6). Силовой расчет ведущего звена. Изображаем ведущее звено (механизм I класса) в масштабе μℓ и в том же положении, что и построенная схема механизма. К звену 1 приложены: сила Р1=400 Н; реакция R12=- R21, реакция R41 и уравновешивающий момент Мур.
Составим уравнение равновесия, из которого определим величину уравновешивающего момента

где плечо h21 определится по чертежу (рисунок 3.11, г)
Реакцию R41 определим, составив уравнение равновесия ведущего звена
Из произвольно выбранной точки а откладываем отрезок  . Из точки b откладываем отрезок
. Из точки b откладываем отрезок  Замыкающий вектор даст величину и покажет направление реакции R41 (рисунок 3.11, д)
Замыкающий вектор даст величину и покажет направление реакции R41 (рисунок 3.11, д)
Пример 2. Провести силовой расчет шестизвенного механизма поперечно-строгального станка (рисунок 3.12, а), данного в положении, когда угол φ1= 45 о . Исходные данные. Длины звеньев в м: ℓАВ = 0,065, ℓАС = 0,35, ℓСD = 0,68, ℓED = 0,21, H=0,285, ℓ1 = 0,39, ℓ2 = 0,29, ℓES5 = 0,105, h=0,1. Нагрузка на звенья механизма: к звену 5 приложена сила резания Р5=200 Н; в точке S5 звена 5 приложена сила тяжести G5=60 H, она направлена вертикально вниз; к зубу колеса 1 ‘ , находящегося на звене 1, приложена в полюсе зацепления Р уравновешивающая сила Рур; радиус начальной окружности колеса 1 ‘ равен R=120 мм, угол зацепления α=20 о .
Определить. Реакции (Н) во всех кинематических парах и уравновешивающую силу Рур (Н), приложенную к звену 1, пренебрегая трением в кинематических парах.
Решение. 1) Строим схему механизма в масштабе μℓ
Построение механизма рассмотрено в п.2.1, §4, Примеры 1, 4.
Рассчитываем расстояния до точек приложения сил G5 и Р5
и прикладываем силы согласно заданию.
2) Все внешние силы, приложенные к звеньям механизма, заданы, поэтому этот пункт расчета выполнен.
3) Уравновешивающая сила Рур приложена к звену 1, поэтому ведущим звеном следует считать звено 1 (АВ – кривошип).
4) От механизма последовательно могут быть отделены две группы II класса: группа Ассура 2 вида, состоящая из звеньев 5 и 4; и группа Ассура 3 вида, состоящая из звеньев 3 и 2.
5) Силовое исследование группы Ассура 4-5 (рисунок 3.12, б). Действуют внешние силы G5, Р5, реакции R34 и R65. Реакция R34 приложена к центру шарнира D и направлена вдоль звена ED, т.к. звено 4 не нагружено внешними силами и тангенциальная составляющая  . Поэтому,
. Поэтому,  . Реакция R65 направлена перпендикулярно направляющим звена 5, точка приложения её неизвестна (условно точка приложения – точка К).
. Реакция R65 направлена перпендикулярно направляющим звена 5, точка приложения её неизвестна (условно точка приложения – точка К).
Составим уравнение равновесия всей структурной группы
 .
.
Строим план сил (рисунок 3.12, в). Выбираем масштаб сил μР=4Н/мм. От точки а откладываем силу G5 в виде отрезка [ab]
 .
.
Далее от точки b откладываем силу Р5 в виде отрезка
 .
.
Через точку а проводим линию, параллельную ED (направление линии действия реакции R34), а через точку с – линию, параллельную направляющим звена 5 (направление линии действия реакции R65), до их взаимного пересечения в точке d. Отрезок [сd] дает в масштабе μР величину реакции R65
Отрезок [dа] дает величину реакции R34
Точку К приложения реакции R65 найдем из условия равновесия звена 5
 .
.
 .
.
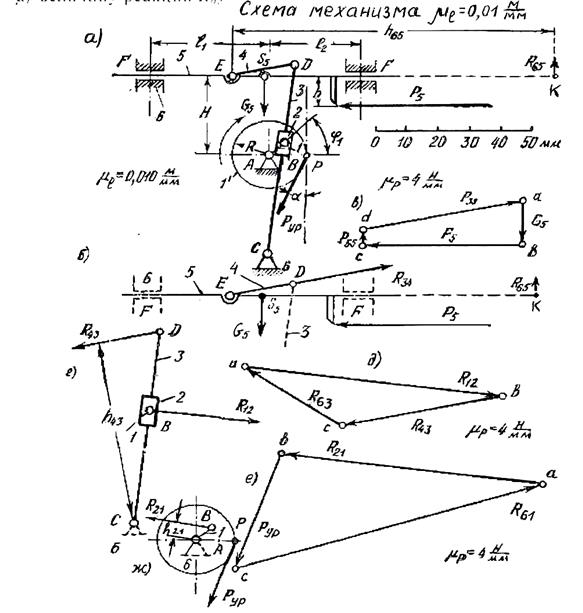
Рисунок 3.12. – Силовой расчет механизма
5) Силовое исследование группы Ассура 2-3 (рисунок 3.12, г). Внешние силы отсутствуют. Реакция R43приложена к точке D и направлена в противоположную сторону реакции R34. Реакция R12направлена перпендикулярно звену CD. Определим реакцию R12 из уравнения моментов относительно точки С
 ,
,
 .
.
Составляем уравнение равновесия группы Ассура 2-3
Строим план сил в масштабе μР=4 Н/мм (рисунок 3.12, д). Из произвольно выбранной точки а откладываем реакцию R12 в виде отрезка  перпендикулярно звену CD. Далее от точки b откладываем реакцию R43 в виде отрезка
перпендикулярно звену CD. Далее от точки b откладываем реакцию R43 в виде отрезка  . Соединяя точки с и а прямой, получаем величину и направление реакции R63 = [са] μР = 38·4 = 152 Н.
. Соединяя точки с и а прямой, получаем величину и направление реакции R63 = [са] μР = 38·4 = 152 Н.
6) Силовой расчет ведущего звена (рисунок 3.12, ж). Передача крутящего момента осуществляется через зубчатую передачу. К звену 1 приложены силы: реакция R21 = -R12, реакция в шарнире А (равная R61) и уравновешивающая сила Рур, приложенная в точке Р колеса 1′ под углом α к касательной, проведенной к начальной окружности.
Составим уравнение моментов звена 1 (АВ)
 ,
,
 .
.
Составляем уравнение равновесия ведущего звена
Строим план сил ведущего звена в масштабе μР=4 Н/мм (рисунок 3.12, е). Из произвольно выбранной точки а откладываем реакцию R21 в виде отрезка  перпендикулярно звену CD. Далее от точки b откладываем реакцию Рур в виде отрезка
перпендикулярно звену CD. Далее от точки b откладываем реакцию Рур в виде отрезка  . Соединяя точки с и а прямой, получаем величину и направление реакции R61 = [са] μР = 102·4 = 408 Н.
. Соединяя точки с и а прямой, получаем величину и направление реакции R61 = [са] μР = 102·4 = 408 Н.
Дата добавления: 2015-06-01 ; просмотров: 4838 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
КИНЕТОСТАТИЧЕСКИЙ РАСЧЕТ КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА, УРАВНОВЕШЕННОГО СТАТИЧЕСКИ
На рис. 4.5, а показана кинематическая схема четырехзвенного криво- шипно-ползунного механизма, для частичного статического уравновешивания которого на кривошипе установлен противовес 4 массой тп. Его статический момент вычисляется по формуле (4.9). Противовес не влияет на систему сил, действующих на структурную группу, в частности на величину и направление реакций Rn, R03, R23 (или R32). Схема нагружения структурной группы приведена на рис. 4.5, б.

В соответствии с формулой (3.21) силы тяжести шатуна и ползуна:  В соответствии с формулами (3.1) и (3.2) силы инерции звеньев:
В соответствии с формулами (3.1) и (3.2) силы инерции звеньев: 
Условие равновесия системы сил, действующих на шатун:

где h h2 натуральные плечи сил G2 и РИ2 соответственно.
Реакция R T n определяется при решении уравнения (4.10). Силы R»2 и /?03 определяются при решении векторного уравнения

Графическое решение уравнения (4.11) показано на рис. 4.5, в. План сил построен в масштабе (лр.
Схема нагружения кривошипа показана на рис. 4.6, а. Противовес рассматривается как точечная масса. Силы тяжести кривошипа и противовеса: 

Силы инерции кривошипа и противовеса:  где ас — ускорение точки С кривошипа.
где ас — ускорение точки С кривошипа. 
Уравнения равновесия кривошипа:

По уравнению (4.12) вычисляется уравновешивающий момент, а по уравнению (4.13) — реакция /?01. Графическое решение уравнения (4.13) приведено на рис. 4.6, б. R0l -af • /лР. Если бы механизм не был уравновешен, реакция R’0] в шарнире О на плане сил (рис. 4.6, б) изображалась бы отрезком ad. Rq = ad ? jup. Расчет показал, что после установки противовеса на кривошип величина реакции R0] уменьшилась.
Методические указания к выполнению курсового проекта
Задания на курсовой проект (КП) содержатся в приложениях 2-4. Они отличаются уровнем сложности кинематических схем механизмов и набором задач, которые должны быть решены студентом в ходе курсового проектирования.
Так, при выполнении задания типа С4 (прил. 2) студент должен провести метрический синтез четырехзвенного кривошипно-ползунного механизма, его структурный, кинематический, силовой расчет и частичное статическое уравновешивание.
В заданиях типа У4 (прил. 4) кинематические размеры кривошипно- ползунного механизма заданы. В ходе курсового проектирования обучающийся решает задачи структурного, кинематического и силового анализа. По желанию для увеличения рейтинга он может выполнить частичное статическое уравновешивание с последующим силовым расчетом уравновешенного механизма.
Наиболее сложные задания на КП содержатся в приложении 3 (задания с номерами 6-1-6-18). Они предусматривают структурный, кинематический и кинетостатический анализ сложного шестизвенного рычажного механизма, содержащего структурные группы II класса 2-го порядка разных видов.
Независимо от сложности задания целесообразно придерживаться следующего алгоритма выполнения КП.
- 1. Изучаются исходные данные, и в случае отсутствия кинематических размеров производится метрический синтез механизма (подраздел 2.2 данного учебного пособия).
- 2. Выполняется структурный анализ механизма, результат которого используется на последующих этапах расчета.
- 3. В соответствии с формулой строения механизма методом планов выполняется его кинематический расчет:
- — в масштабе строится разметка механизма для 12 положений и определяются его крайние положения (подраздел 2.3 учебного пособия);
- — для 12 положений механизма методом планов определяются линейные и угловые скорости звеньев и отдельных их точек, в частности центров масс. Расчетные модели описаны в подразделе 2.1, пример их использования — в подразделах 2.3 и 3.4;
- — для двух положений механизма (по согласованию с преподавателем) выполняется расчет ускорений, соответствующие расчетные модели описаны в подразделах 2.1, 2.3 и 3.4.
- 4. Кинетостатический расчет механизма методом планов выполняется для двух его положений. Расчетные модели структурных групп и исходного механизма, последовательность расчета приведены в подразделах 3.2-3.4 учебного пособия. Метод определения сил инерции (подраздел 3.1) согласуется с преподавателем.
- 5. Уравновешивающий момент Мур вычисляется методом Н. Е. Жуковского для двух положений механизма. Методика расчета приведена в подразделе 3.5. На этом этапе выполнения КП оценивается (в процентах) расхождение результатов расчета Мур, полученных разными методами.
- 6. Определяются параметры противовеса, устанавливаемого в плоскости движения кривошипа, и для двух положений методом планов выполняется силовой расчет уравновешенного механизма (подраздел 4.2).
При исследовании сложного рычажного механизма (прил. 3) пункты 1 и 6 данного алгоритма не выполняются.
Пояснительная записка формируется параллельно с выполнением расчетов. Требования к ее оформлению будут сформулированы в следующем разделе данного учебного пособия.