В системе (1) Коши компоненты деформации определяются тремя компонентами перемещений  . Поэтому компоненты деформации не могут быть произвольными, а между ними должна существовать связь, которая носит название условий совместности или неразрывности деформаций. Зависимости существуют между компонентами деформаций в одной координатной плоскости и в разных плоскостях. Установим связь между составляющими деформации в одной плоскости. Для этого продифференцируем первое уравнение зависимости (1) дважды по
. Поэтому компоненты деформации не могут быть произвольными, а между ними должна существовать связь, которая носит название условий совместности или неразрывности деформаций. Зависимости существуют между компонентами деформаций в одной координатной плоскости и в разных плоскостях. Установим связь между составляющими деформации в одной плоскости. Для этого продифференцируем первое уравнение зависимости (1) дважды по  , а второе – дважды по
, а второе – дважды по  и полученные выражения сложим
и полученные выражения сложим

Проведя подобные операции получим и для двух других плоскостей
 (2)
(2)
Аналогичным образом можно выразить каждую линейную деформацию  через сдвиговые
через сдвиговые  .
.
Уравнение совместности показывает, что сплошное тело до деформации остается таковым и после нее. С энергетической точки зрения соблюдение условий совместности соответствует принципу минимума энергии деформации, т.к. любое нарушение сплошности деформируемой среды связано с дополнительной затратой энергии на образование разрывов.
Характеристики деформации
Для количественной оценки величины формоизменения, а также пластичности металлов существуют математические выражения, отражающие меру остаточной деформации.
Абсолютная деформация выражает абсолютное изменение какого-либо линейного или углового размера, площади сечения или поверхности выделенного участка либо всего тела
где  — длина образца соответственно до и после деформации.
— длина образца соответственно до и после деформации.
Относительная деформация – характеризует относительное изменение тех же величин
 .
.
Она часто характеризует степень деформации тела, как общую величину его формоизменения. Условие постоянства объема  .
.
Логарифмическая деформация, являющаяся разновидностью относительной деформации.
 .
.
Она обладает свойством аддитивности, т.е. сложения и может характеризовать суммарную деформацию тела. Поэтому ее часто называют истинной деформацией.

Пусть дано два этапа деформации
Полная величина деформации будет записана
 , но
, но  .
.
Значит 

Между истинной и относительной деформациями существует связь

Из условия постоянства объема  .
.
Отношение размеров тела после деформации к соответствующим начальным размерам называют коэффициентами деформации.

 – коэффи-циент вытяжки.
– коэффи-циент вытяжки.
 – коэф-фициент уширения.
– коэф-фициент уширения.
 – коэф-фициент осадки.
– коэф-фициент осадки.
Выражение  — характеризует условие постоянства объема (несжимаемости).
— характеризует условие постоянства объема (несжимаемости).
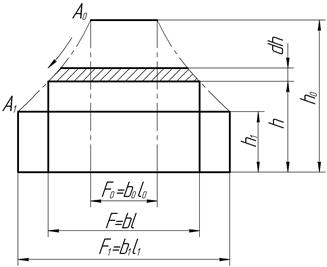
Смещенный объем
При определении работы, расходуемой на деформацию, пользуются понятием смещенного объема, представляющего прибавленный или удаленный в процессе деформирования объем в одном из главных направлений.
Смещенный по высоте объем при осадке на  параллелепипеда, имеющего в данный момент высоту
параллелепипеда, имеющего в данный момент высоту  и площадь
и площадь  , равен
, равен
 .
.
Учитывая, что  , запишем
, запишем  .
.
За время осадки с высоты  до
до 

и точка из положения  смещается в
смещается в  .
.
Аналогично можно записать по двум другим направлениям

Из условия постоянства объема  следует, что смещенный объем в одном из направлений равен сумме двух других с противоположным знаком.
следует, что смещенный объем в одном из направлений равен сумме двух других с противоположным знаком.
Смещенный объем может быть меньше, равен и даже больше объема самого тела. Условие равенства этих объемов
 или
или  , т.е.
, т.е. 
Большие деформации
Технологические процессы ОМД характеризуются большими деформациями. Для их расчета следует пользоваться логарифмическими (истинными) деформациями, обладающими свойством аддитивности, коэффициентами деформации и смещенными объемами.
Видео:Основы гидродинамики и аэродинамики | условие неразрывностиСкачать

Уравнения неразрывности деформаций
2.3 Уравнения неразрывности деформаций
Перемещения любой точки сплошного тела определяется тремя функциями: u,  ,
,  ; деформации же данной точки определяются шестью функциями:
; деформации же данной точки определяются шестью функциями:  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Уравнения (2.2) показывают, что если заданы три функции u, , , то этим самым будут определены все шесть составляющих деформации, так как они выражаются через первые производные от составляющих перемещения.
Таким образом, очевидно, что шесть функций для компонентов деформации произвольно задать нельзя, между ними должны существовать какие-то зависимости, которые мы и установим.
Число таких зависимостей равно шести, и они делятся на две группы: I группа — зависимости между составляющими деформации в одной плоскости и II группа — зависимости между составляющими деформации в разных плоскостях.
I группа. Продифференцируем три уравнения левого столбца формул (2.2) дважды:
 ;
; 
Видео:Вывод уравнения неразрывности - Лекция 1Скачать

Геометрическая теория деформации
Перемещения и деформации в точке тела. Тензор деформаций. Связь между перемещениями и деформациями (формулы Коши)
Если упругое тело закрепить так, чтобы оно не могло перемещаться как абсолютно твёрдое тело, и приложить внешние нагрузки, то перемещения любой его точки будут вызываться только деформациями этого тела.
Рассмотрим точку M(x, y, z). После деформации тела (рис. 2.5) точка М переместится в новое положение M¢(x¢, y¢, z¢) . Обозначим три компоненты (проекции) вектора перемещения  на оси координат x, y, z через u, v, w соответственно.
на оси координат x, y, z через u, v, w соответственно.

Рисунок 2.5 – К определению понятия «перемещение»
Будем считать, что перемещения тела, по сравнению с его линейными размерами, являются весьма малыми величинами, и, в силу сплошности тела, непрерывно изменяющимися по его объёму. Таким образом, компоненты вектора перемещения являются функциями координат точки:
 (2.13)
(2.13)
Разница в перемещениях в различных точках тела вызывает его деформацию. Деформации обозначаются греческими буквами e и g.
Слайд 14
Рассмотрим элементарный параллелепипед с рёбрами dx, dy, dz вырезанный в окрестности точки P упругого тела до его деформации (рис. 2.6).
Если тело подвергается деформации и величины u, v, w являются компонентами вектора перемещения точки Р, то перемещение в направлении оси x соседней точки A, расположенной на оси x, равно  , ввиду возрастания функции перемещения u на величину
, ввиду возрастания функции перемещения u на величину  с увеличением координаты x на расстояние dx. Увеличение длины ребра PA, т.е. его абсолютное удлинение, вызванное деформацией, равно
с увеличением координаты x на расстояние dx. Увеличение длины ребра PA, т.е. его абсолютное удлинение, вызванное деформацией, равно  .
.

Рисунок 2.6 – Элементарный параллелепипед
Тогда линейная деформация (относительное удлинение) в точке P в направлении x представляет собой отношение абсолютного удлинения ребра PA к его исходной длине dx :

Таким же путём можно показать, что относительные удлинения в точке P в направлениях y и z определяются производными  .
.
Слайд 15
Рассмотрим изменение угла между элементами PA и PB при деформации параллелепипеда (рис. 2.7).

Рисунок 2.7 – К определению угловых деформаций
Пусть точка Р получила перемещения u и v в направлении осей x и y, соответственно. Тогда положение этой точки будет P¢. Перемещение точки A в направлении y будет  , а перемещение точки B в направлении x –
, а перемещение точки B в направлении x –  В итоге новое направление Р¢А¢ ребра PA образует с начальным направлением малый угол a. Определим его.
В итоге новое направление Р¢А¢ ребра PA образует с начальным направлением малый угол a. Определим его.
Расстояние  Из треугольника DР¢СА находим
Из треугольника DР¢СА находим  Ограничиваясь рассмотрением малых деформаций, можно полагать, что
Ограничиваясь рассмотрением малых деформаций, можно полагать, что  Точно так же направление Р¢В¢ повёрнуто к направлению РВ на малый угол b. Аналогично рассуждая, получаем
Точно так же направление Р¢В¢ повёрнуто к направлению РВ на малый угол b. Аналогично рассуждая, получаем  .
.
Слайд 16
Отсюда видно, что первоначальный прямой угол APB между двумя рёбрами PA и PB уменьшился на величину a +b. Эта величина представляет собой угловуюдеформацию (относительный сдвиг) между направлениями x, y:

Таким же способом можно получить угловые деформации в плоскостях y, z и x, z. В пределе, когда рёбра параллелепипеда стремятся к нулю, получаем формулы для шести функций деформаций в следующих точках:
– трёх линейных деформаций:
 (2.14)
(2.14)
– трёх угловых деформаций:
 (2.15)
(2.15)
Полученные уравнения (2.14) и (2.15) устанавливают связь между функциями перемещений и деформаций. Они называются формулами Коши.
Слайд 17
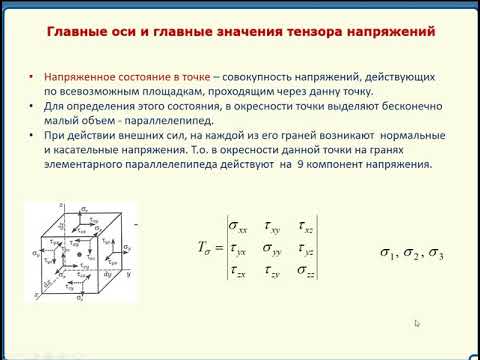
Если рассматривать «деформированное состояние в точке» как совокупность линейных и угловых деформаций для всевозможных направлений осей, проведённых через данную точку. Тогда тензор деформаций – это совокупность компонент деформации бесконечно малого объёма (в форме параллелепипеда) в окрестности заданной точки:
 (2.16)
(2.16)
Тензор напряжения описывает деформированное состояние в данной точке твёрдого тела.
Относительные удлинения характеризуют изменение длины рёбер параллелепипеда, вырезанного из тела вокруг точки. Индексы указывают направления деформации. Относительные сдвиги характеризуют изменение формы параллелепипеда за счёт искажения его прямых углов. Индексы указывают, в какой координатной плоскости появляется угловая деформация параллелепипеда.
Относительно знаков деформаций существует следующее правило: положительным линейным деформациям ex, ey, ez соответствуют удлинения вдоль осей координат, отрицательным – укорочения; положительным угловым деформациям gxy, gyz, gzx соответствуют уменьшения углов между положительными направлениями осей; отрицательным – увеличения тех же углов.
Слайд 18
Уравнения неразрывности деформаций (уравнения Сен-Венана)
Формулы Коши (2.14), (2.15) связывают шесть компонент тензора деформаций ex, ey, ez , gxy, gyz, gzx и три компоненты вектора перемещения – u, v, w. Если заданы три функции перемещения, то шесть компонент тензора деформаций определяются из формул Коши однозначно. Сложнее обстоит дело с обратной постановкой задачи. Если заданы шесть функций деформаций, то для определения трёх функций перемещений необходимо проинтегрировать шесть дифференциальных уравнений (2.14), (2.15) в частных производных, что не всегда можно сделать однозначно. Поэтому между шестью компонентами тензора деформаций должны существовать определённые зависимости.
Для получения этих зависимостей, которые делятся на две группы, необходимо исключить перемещения u, v, w из формул Коши.
 (2.17)
(2.17)
 (2.18)
(2.18)
Полученные дифференциальные уравнения (1.17), (1.18) называются уравнениями неразрывности деформаций, или уравнениями Сен-Венана.
Геометрическая интерпретация этих соотношений состоит в следующем. Представим себе упругое тело разрезанным на малые параллелепипеды и дадим каждому из них деформацию, определяемую шестью компонентами. Если эти деформации не связаны между собою определёнными зависимостями, то из отдельных деформированных параллелепипедов не удастся вновь сложить непрерывное, но уже деформированное, твёрдое тело: в некоторых точках окажутся бесконечно малые разрывы. Уравнения (1.17) и (1.18) дают такие зависимости между компонентами деформации, при выполнении которых тело после деформации получается сплошным, или непрерывным.
🔍 Видео
Урок 132. Основные понятия гидродинамики. Уравнение непрерывностиСкачать

Закон БернуллиСкачать
Плоская задача в напряжениях. Функция напряжений Эри.Скачать

Лекция 2. Уравнение неразрывностиСкачать

Урок 133. Закон Бернулли. Уравнение БернуллиСкачать

Основы механики сплошных сред. Часть 1. Уравнение движения в напряженияхСкачать
Механика сплошной среды. Лекция 5. Силы, напряжения и деформации. Уравнения механики.Скачать

Дифференциальное уравнение Эйлера. Основное уравнение гидростатикиСкачать

МСС. Расчёт главных напряжений. Часть 1.Скачать
Расчет статически неопределимой стержневой системы. Уравнение совместимости деформацийСкачать

Физика. 10 класс. Уравнение неразрывности. Уравнение Бернулли. Подъёмная сила /29.10.2020/Скачать

Лекция №1 Постановка задачи теории упругости. Условия совместности деформаций Сен-Венана.Скачать

Тензор напряженийСкачать

Математический анализ, 5 урок, Непрерывность функцииСкачать
Вязкость. Ламинарное и турбулентное течения жидкостей. 10 класс.Скачать

Лекция №6. Определение напряжений в грунтахСкачать

Консультация к ГКЭ. Механика. 4. Сплошные средыСкачать

Лекция IV-3. Напряженное состояние под внешней нагрузкой. Часть 1Скачать
