Уравнение колебаний потенциальной и кинетической энергии
Обновлено
Поделиться
Просмотров1322
Уравнение колебаний потенциальной и кинетической энергии
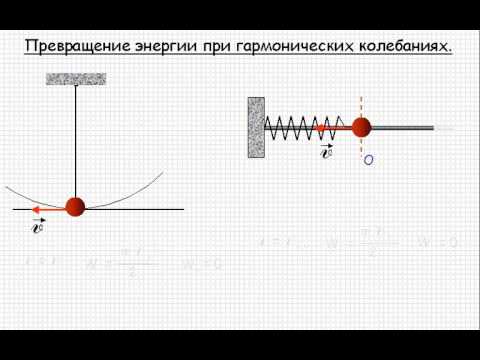
При свободных механических колебаниях кинетическая и потенциальная энергии изменяются периодически. При максимальном отклонении тела от положения равновесия его скорость, а следовательно, и кинетическая энергия обращаются в нуль. В этом положении потенциальная энергия колеблющегося тела достигает максимального значения. Для груза на горизонтально расположенной пружине потенциальная энергия – это энергия упругих деформаций пружины. Для математического маятника – это энергия в поле тяготения Земли.
Когда тело при своем движении проходит через положение равновесия, его скорость максимальна. В этот момент оно обладает максимальной кинетической и минимальной потенциальной энергией. Увеличение кинетической энергии происходит за счет уменьшения потенциальной энергии. При дальнейшем движении начинает увеличиваться потенциальная энергия за счет убыли кинетической энергии и т. д.
Таким образом, при гармонических колебаниях происходит периодическое превращение кинетической энергии в потенциальную и наоборот .
Если в колебательной системе отсутствует трение, то полная механическая энергия при свободных колебаниях остается неизменной.
Для груза на пружине (см. §2.2):
Для малых колебаний математического маятника (см. §2.3):
Здесь m – максимальная высота подъема маятника в поле тяготения Земли, m и m = m – максимальные значения отклонения маятника от положения равновесия и его скорости.
Превращения энергии при свободных механических колебаниях в отсутствие трения можно проиллюстрировать графически. Рассмотрим в качестве примера колебания груза массой на пружине жесткости . Пусть смещение груза из положения равновесия и его скорость изменяются со временем по законам:
m sin .
Следовательно,
На рис. 2.4.1 изображены графики функций p(t) и k(t) . Потенциальная и кинетическая энергии за период колебаний два раза достигают максимальных значений. Сумма остается неизменной.
Рисунок 2.4.1.
В реальных условиях любая колебательная система находится под воздействием сил трения (сопротивления). При этом часть механической энергии превращается во внутреннюю энергию теплового движения атомов и молекул, и колебания становятся затухающими (рис. 2.4.2).
Рисунок 2.4.2.
Скорость затухания колебаний зависит от величины сил трения. Интервал времени , в течении которого амплитуда колебаний уменьшается в раз, называется временем затухания .
Частота свободных колебаний зависит от скорости их затухания. При возрастании сил трения собственная частота уменьшается. Однако, изменение собственной частоты становится заметным лишь при достаточно больших силах трения, когда собственные колебания затухают быстро.
Важной характеристикой колебательной системы, совершающей свободные затухающие колебания, является добротность . Этот параметр определяется как число полных колебаний, совершаемых системой за время затухания , умноженное на :
Чем медленнее происходит затухание свободных колебаний, тем выше добротность колебательной системы. Добротность колебательной системы, определенная по затуханию колебаний на рис. 2.4.2, приблизительно равна .
Добротности механических колебательных систем могут быть очень высокими – порядка нескольких сотен и даже тысяч.
Понятие добротности имеет глубокий энергетический смысл. Можно определить добротность колебательной системы следующим энергетическим соотношением:
Таким образом, добротность характеризует относительную убыль энергии колебательной системы из-за наличия трения на интервале времени, равном одному периоду колебаний.
Кинетическая, потенциальная и полная энергии гармонических колебаний
Лекция 5. Механические колебания
План лекции
5.1. Основные характеристики колебательного движения.
5.2. Кинетическая, потенциальная и полная энергии гармонических колебаний.
5.3. Уравнение гармонических колебаний. Маятники.
5.4. Затухание колебания.
5.5. Вынужденные колебания. Резонанс.
5.6. Явление резонанса в строительстве.
Основные характеристики колебательного движения
Процессы точно или приблизительно повторяющиеся через одинаковые промежутки времени называются колебаниями.В зависимости от физической природы различают механические, электромагнитные и другие виды колебаний. Несмотря на разную природу колебаний, в них обнаруживаются одни и те же физические закономерности, они описываются одними и теми же математическими уравнениями и исследуются общими методами, разработка и применение которых составляют задачу теории колебаний.
В данном курсе физики мы будем изучать два наиболее распространенных класса колебаний: механические и электрические.
Среди разнообразных колебаний основную и существенную роль играют так называемые гармонические колебания, то есть такие, при которых колеблющаяся величина изменяется с течением времени по закону синуса или косинуса.
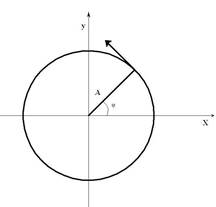
Рассмотрим гармонические колебания на примере колеблющейся точки.
Пусть точка вращается по окружности радиуса А с угловой скоростью ω0 (рис.5.1).
Рис.5.1.
Если точку спроецировать на оси X и Y, то ее проекции будут совершать колебания и удовлетворяют следующим уравнениям соответственно
, (5.1)
и (5.2)
где х и y – смещения колеблющейся точки от положения равновесия;
А – амплитуда колебания (максимальное смещение);
ω0 – круговая (циклическая) частота колебаний.
Точка совершает одно полное колебание за время Τ, называемое периодом колебания. Частота колебаний ν (число колебаний в единицу времени) есть . Между указанными величинами существует взаимосвязь
(5.3)
Геометрический смысл параметров уравнений (5.2) можно объяснить с помощью векторных диаграмм. Выберем на оси Х точку О и из этой точки под углом φ0 проведем вектор А. Будем вращать вектор А с угловой скоростью ω0 и тогда его проекция на ось будет смещаться на величину x (рис. 5.2).
Рис.5.2.
Колеблющаяся точка обладает скоростью и ускорением. Скорость материальной точки
(5.4)
Ускорение материальной точки
(5.5)
С учетом формулы (5.2) получим
(5.6)
Сравнивая уравнения (5.2), (5.4) и (5.5) замечаем, что скорость опережает смещение на π/2. Фазы ускорения и смещения различаются на π (изменяются в противофазе). Графические зависимости смещения, скорости и ускорения от времени показаны на рис.5.3.
Умножив обе части равенства уравнения (5.6) на массу m материальной точки получим
(5.7)
Используя II закон Ньютона, получаем
(5.8)
Рис.5.3.
Таким образом, чтобы совершались гармонические колебания на материальную точку должна действовать сила F, пропорциональная смещению x, которая возвращает ее в положение равновесия
(5.9)
где, k – некоторый коэффициент (зависящий от свойств колеблющейся системы) и называемой жесткостью.
Из уравнения (5.7) и (5.8) видно, что .
Кинетическая, потенциальная и полная энергии гармонических колебаний
Полная энергия Е колеблющейся материальной точки равна сумме кинетической Ек и потенциальной Еп энергий
Кинетическую энергию можно найти, зная массу m и скорость u
(5.11)
(5.12)
Выражение для потенциальной энергии можно найти из соотношений между потенциальной энергией и силой.
(5.13)
(5.14)
Учитывая, что и получаем
(5.15)
Полную энергию получим сложив (5.12) и (5.15)
(5.16)
Таким образом, полная энергия пропорциональна квадрату амплитуды колебаний.
Из формул (5.12) и (5.15) видно, что когда увеличивается Еп уменьшается и наоборот.
5.3. Уравнение гармонических колебаний. Маятники
На колеблющуюся материальную точку массой m действует возвращающая сила F = — kx. Эта сила вызывает ускорение . Равенство этих сил позволяет записать
где, k – жесткость системы, ; х – смещение; а – ускорение материальной точки.
Сделав соответствующие подстановки в (5.17), получим
или (5.18)
Уравнение (5.18) представляет собой дифференциальное уравнение второго порядка незатухающих гармонических колебаний материальной точки.
Решением этого дифференциального уравнения как раз и является уравнение (5.2): .
Колебания любого гармонического осциллятора (или гармонического вибратора) описываются дифференциальным уравнением второго порядка
(5.19)
Решением этого уравнения является
(5.20)
где S0 – амплитудное (максимальное) значение параметра S.
Примерами гармонических осцилляторов являются маятники, колебательный контур.
В качестве примера малых колебаний рассмотрим колебания маятников.
Пружинный маятник
Груз массой m, подвешенный на упругой пружине представляет собой пружинный маятник (рис.5.4). Если груз оттянуть вниз и отпустить, то под действием силы F = -kx маятник будет совершать колебания; k – коэффициент жесткости (в данном случае коэффициент упругости).
Рис.5.4.
Уравнение движения маятника имеет вид
или ,
Его решением является
Это значит, что пружинный маятник совершает гармонические колебания с циклической частотой ω0
, с другой стороны .
Период колебаний пружинного маятника
(5.21).
Физический маятник
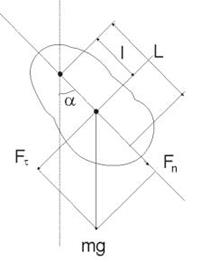
Физическим маятником называется твердое тело, которое может колебаться под действием силы тяжести вокруг оси, не проходящей через центр масс. При отклонении маятника относительно оси О угол α, на него действует М – момент возвращающей силы (рис.5.5)
(5.22)
где, I – момент инерции относительно оси О;
l – плечо силы Fτ; при малых углах .
Рис.5.5.
Из (5.22) получаем дифференциальное уравнение
(5.23)
Сравнив уравнение (5.23) с уравнением гармонического осциллятора (5.19), получим
, (5.24)
где, – приведенная длина физического маятника.
От точки подвеса О на линии ОС на расстоянии L находится точка О1, называемая центром качения. Точки О и О1 обладает свойством взаимозаменяемости.
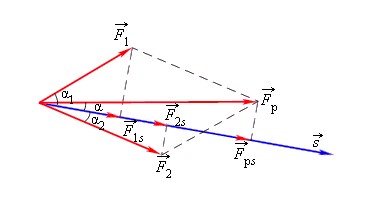
Рассмотрим тело, которое двигалось под действием каких-то сил изменило свою скорость с v 1 → до v 2 → . В этом случае силы, действующие на тело, совершили определенную работу A .
Работа всех сил, действующих на тело, равна работе равнодействующей силы.
F р → = F 1 → + F 2 →
A = F 1 · s · cos α 1 + F 2 · s · cos α 2 = F р cos α .
Установим связь между изменением скорости тела и работой, совершенной действующими на тело силами. Для простоты будем считать, что на тело действует одна сила F → , направленная вдоль прямой линии. Под действием этой силы тело движется равноускоренно и прямолинейно. В этом случае векторы F → , v → , a → , s → совпадают по направлению и их можно рассматривать как алгебраические величины.
Работа силы F → равна A = F s . Перемещение тела выражается формулой s = v 2 2 — v 1 2 2 a . Отсюда:
A = F s = F · v 2 2 — v 1 2 2 a = m a · v 2 2 — v 1 2 2 a
A = m v 2 2 — m v 1 2 2 = m v 2 2 2 — m v 1 2 2 .
Как видим, работа, совершенная силой, пропорционально изменению квадрата скорости тела.
Определение. Кинетическая энергия
Кинетическая энергия тела равна половине произведения массы тела на квадрат его скорости.
Кинетическая энергия — энергия движения тела. При нулевой скорости она равна нулю.
Видео:Урок 114. Работа. Теорема о кинетической энергииСкачать
Теорема о кинетической энергии
Вновь обратимся к рассмотренному примеру и сформулируем теорему о кинетической энергии тела.
Теорема о кинетической энергии
Работа приложенной к телу силы равна изменению кинетической энергии тела. Данное утверждение справедливо и тогда, когда тело движется под действием изменяющейся по модулю и направлению силы.
A = E K 2 — E K 1 .
Таким образом, кинетическая энергия тела массы m , движущегося со скоростью v → , равна работе, которую сила должна совершить, чтобы разогнать тело до этой скорости.
A = m v 2 2 = E K .
Чтобы остановить тело, нужно совершить работу
A = — m v 2 2 =- E K
Видео:Энергия. Кинетическая и потенциальная энергия. 7 класс.Скачать
Потенциальная энергия
Кинетическая энергия — это энергия движения. Наряду с кинетической энергией есть еще потенциальная энергия, то есть энергия взаимодействия тел, которая зависит от их положения.
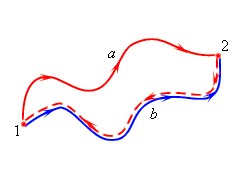
Например, тело поднято над поверхностью земли. Чем выше оно поднято, тем больше будет потенциальная энергия. Когда тело падает вниз под действием силы тяжести, эта сила совершает работу. Причем работа силы тяжести определяется только вертикальным перемещением тела и не зависит от траектории.
Вообще о потенциальной энергии можно говорить только в контексте тех сил, работа которых не зависит от формы траектории тела. Такие силы называются консервативными.
Примеры консервативных сил: сила тяжести, сила упругости.
Когда тело движется вертикально вверх, сила тяжести совершает отрицательную работу.
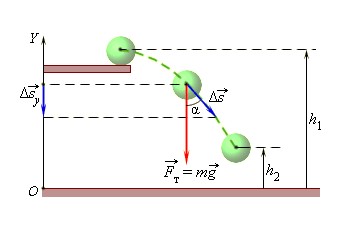
Рассмотрим пример, когда шар переместился из точки с высотой h 1 в точку с высотой h 2 .
При этом сила тяжести совершила работу, равную
A = — m g ( h 2 — h 1 ) = — ( m g h 2 — m g h 1 ) .
Эта работа равна изменению величины m g h , взятому с противоположным знаком.
Величина Е П = m g h — потенциальна энергия в поле силы тяжести. На нулевом уровне (на земле) потенциальная энергия тела равна нулю.
Определение. Потенциальная энергия
Потенциальная энергия — часть полной механической энергии системы, находящейся в поле консервативных сил. Потенциальная энергия зависит от положения точек, составляющих систему.
Можно говорить о потенциальной энергии в поле силы тяжести, потенциальной энергии сжатой пружины и т.д.
Работа силы тяжести равна изменению потенциальной энергии, взятому с противоположным знаком.
A = — ( E П 2 — E П 1 ) .
Ясно, что потенциальная энергия зависит от выбора нулевого уровня (начала координат оси OY). Подчеркнем, что физический смысл имеет изменение потенциальной энергии при перемещении тел друг относительно друга. При любом выборе нулевого уровня изменение потенциальной энергии будет одинаковым.
При расчете движения тел в поле гравитации Земли, но на значительных расстояниях от нее, во внимание нужно принимать закон всемирного тяготения (зависимость силы тяготения от расстояния до цента Земли). Приведем формулу, выражающую зависимость потенциальной энергии тела.
Здесь G — гравитационная постоянная, M — масса Земли.
Представим, что в первом случае мы взяли пружину и удлинили ее на величину x . Во втором случае мы сначала удлинили пружину на 2 x , а затем уменьшили на x . В обоих случаях пружина оказалась растянута на x , но это было сделано разными способами.
При этом работа силы упругости при изменении длины пружины на x в обоих случаях была одинакова и равна
A у п р = — A = — k x 2 2 .
Величина E у п р = k x 2 2 называется потенциальной энергией сжатой пружины. Она равна работе силы упругости при переходе из данного состояния тела в состояние с нулевой деформацией.
💥 Видео
В чем разница потенциальной и кинетической энергии ? Простыми словамиСкачать
ПОТЕНЦИАЛЬНАЯ энергия | КИНЕТИЧЕСКАЯ энергияСкачать






 два раза достигают максимальных значений. Сумма
два раза достигают максимальных значений. Сумма  остается неизменной.
остается неизменной.



 ,
,  (5.1)
(5.1) и
и  (5.2)
(5.2) . Между указанными величинами существует взаимосвязь
. Между указанными величинами существует взаимосвязь (5.3)
(5.3)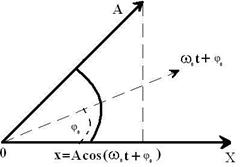
 (5.4)
(5.4) (5.5)
(5.5) (5.6)
(5.6) (5.7)
(5.7) (5.8)
(5.8)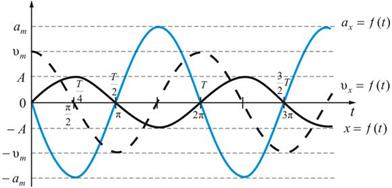
 (5.9)
(5.9) .
. (5.11)
(5.11)
 (5.12)
(5.12)
 (5.13)
(5.13) (5.14)
(5.14) (5.15)
(5.15) (5.16)
(5.16) увеличивается Еп уменьшается и наоборот.
увеличивается Еп уменьшается и наоборот. . Равенство этих сил позволяет записать
. Равенство этих сил позволяет записать или
или  (5.18)
(5.18) (5.19)
(5.19) (5.20)
(5.20)
 или
или  ,
, , с другой стороны
, с другой стороны  .
. (5.21).
(5.21). (рис.5.5)
(рис.5.5) (5.22)
(5.22) .
.
 (5.23)
(5.23) ,
,  (5.24)
(5.24) – приведенная длина физического маятника.
– приведенная длина физического маятника.