Методические указания к лабораторной работе
по дисциплине «Станки и инструмент»
Федеральное агентство по образованию
Сибирская государственная автомобильно-дорожная академия
Кафедра «Конструкционные материалы и специальные технологии»
- АНАЛИЗ КИНЕМАТИЧЕСКОЙ СХЕМЫ
- МЕТАЛЛОРЕЖУЩЕГО СТАНКА
- КИНЕМАТИЧЕСКАЯ СХЕМА СТАНКА
- ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
- ДЛЯ КИНЕМАТИЧЕСКИХ СХЕМ
- СХЕМЫ РЯДА ТИПОВЫХ МЕХАНИЗМОВ ДЛЯ СТУПЕНЧАТОГО
- ИЗМЕНЕНИЯ ЧАСТОТ ВРАЩЕНИЯ
- УРАВНЕНИЕ КИНЕМАТИЧЕСКОГО БАЛАНСА
- ПРИМЕР АНАЛИЗА КИНЕМАТИЧЕСКОЙ СХЕМЫ
- ГОРИЗОНТАЛЬНО-ФРЕЗЕРНОГО СТАНКА МОДЕЛИ 6М80Г
- ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
- КОНТРОЛЬНЫЕ ВОПРОСЫ
- ПРИЛОЖЕНИЕ
- Кинематическая настройка станков
- Кинематическая цепь
- Уравнение кинематического баланса
- Величина хода
- Выводы
- Практическая работа №10 «Составление уравнения кинематических цепей зубообрабатывающего станка»»
- Просмотр содержимого документа «Практическая работа №10 «Составление уравнения кинематических цепей зубообрабатывающего станка»»»
АНАЛИЗ КИНЕМАТИЧЕСКОЙ СХЕМЫ
МЕТАЛЛОРЕЖУЩЕГО СТАНКА
Методические указания к лабораторной работе по дисциплине «Станки и инструмент»
Составители Б. И. Калмин, М. С. Корытов (в авторской редакции) Омск СибАДИ УДК 621. ББК 34. Рецензент канд. техн. наук, доц. В. Н. Никитин.
Работа одобрена методической комиссией факультета «Автомобильный транспорт» в качестве методических указаний к лабораторной работе по дисциплине «Станки и инструмент» для студентов специальностей 190201, 190601.
Анализ кинематической схемы металлорежущего станка: Методические указания к лабораторной работе по дисциплине «Станки и инструмент» / Сост.: Б.И. Калмин, М.С. Корытов. – Омск: Изд-во СибАДИ, 2012. – 16 с.
Приводятся условные графические изображения типовых элементов кинематических схем станков. Дается понятие об уравнении кинематического баланса цепи, пример анализа кинематической цепи горизонтальнофрезерного станка модели 6М80Г. Приводятся фрагменты кинематических схем некоторых металлорежущих станков для самостоятельного выполнения индивидуальных заданий.
Табл. 2. Ил. 1. Библиогр.: 3 назв.
Подписано к печати 2012. Формат 60 х 90 1/16.
Бумага писчая. Гарнитура Таймс.
Оперативный способ печати. Усл. п. л. 1,0 уч.-изд. л. 1,0.
Тираж 50 экз. Изд. №. Заказ Цена договорная.
*** Отпечатано в ПЦ издательства СибАДИ 644099, Омск, ул. П.Некрасова, Составители: Б.И. Калмин, М. С. Корытов, Цель работы – практическое ознакомление с механизмами, кинематическими схемами и методикой составления уравнения кинематического баланса металлорежущих станков.
КИНЕМАТИЧЕСКАЯ СХЕМА СТАНКА
Передача движений от электродвигателя к рабочим органам станка осуществляется при помощи ряда механизмов: зубчатых, ременных, червячных, винтовых, реечных и др. Условное изображение этих механизмов, соединенных в определенной последовательности в кинематические цепи, называется кинематической схемой [1, 2, 3]. Каждая кинематическая цепь – это система последовательно соединенных элементарных механизмов, обеспечивающих исполнительные движения рабочих органов станка (вращение шпинделя, поступательное перемещение стола станка и т. д.).
На схемах указывают численные значения диаметров шкивов, чисел зубьев зубчатых колес, их модулей зацепления и т. д.
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
ДЛЯ КИНЕМАТИЧЕСКИХ СХЕМ
Таблица Элемент Условное Элемент Условное схемы обозначение схемы обозначение Электродвигатель Ременная передача (открытая плоским ремнем) Вал Винтовая передача (разъемная гайка) Радиальный Цепная подшипник (без передача уточнения типа) Окончание т а б л. без вращения соединение детали с
СХЕМЫ РЯДА ТИПОВЫХ МЕХАНИЗМОВ ДЛЯ СТУПЕНЧАТОГО
ИЗМЕНЕНИЯ ЧАСТОТ ВРАЩЕНИЯ
Таблица Окончание т а б л.
УРАВНЕНИЕ КИНЕМАТИЧЕСКОГО БАЛАНСА
Уравнение, устанавливающее функциональную зависимость между величинами перемещений начального и конечного звеньев кинематической цепи, называется уравнением кинематического баланса.
Начальные звенья кинематической цепи в большинстве случаев имеют вращательное движение, конечные звенья получают как вращательное, так и прямолинейное движение.
Если начальное и конечное звенья оба вращаются, то уравнение кинематического баланса может быть представлено в следующем виде:
где nк – частота вращения конечного звена (шпинделя), об/мин; nн – частота вращения начального звена (вала электродвигателя), об/мин; i – передаточное отношение кинематической цепи.
где i1, i2, i3. in – передаточные отношения отдельных кинематических пар цепи.
Если начальное звено имеет вращательное движение, а конечное – прямолинейное (движение подачи), то при минутной подаче Sм уравнение кинематического баланса имеет вид где H – ход кинематической пары, преобразующей вращательное движение в прямолинейное.
Для винтовой пары где tв – шаг ходового винта, мм; k – число его заходов.
где m – модуль зацепления, мм; z – число зубьев реечного колеса.
Когда подача конечного звена Sо задается в миллиметрах на один оборот начального звена, уравнение кинематического баланса имеет вид
ПРИМЕР АНАЛИЗА КИНЕМАТИЧЕСКОЙ СХЕМЫ
ГОРИЗОНТАЛЬНО-ФРЕЗЕРНОГО СТАНКА МОДЕЛИ 6М80Г
Кинематическая схема станка приведена на рисунке.
1. Цепь главного движения (вращения шпинделя).
Уравнение кинематического баланса цепи в общем виде:
Кинематическая схема горизонтально-фрезерного станка модели 6М80Г (в пунктирный контур заключена цепь движения подач) где nшп – частота вращения шпинделя, об/мин; nэ – частота вращения вала электродвигателя, об/мин.
Уравнение кинематического баланса цепи в развернутом виде:
Количество скоростей вращения шпинделя Максимальное и минимальное числа оборотов шпинделя:
2. Цепь движения подач.
Уравнение кинематического баланса цепи в общем виде:
где Sм – минутная подача стола станка, мм/мин; nэ – частота вращения вала электродвигателя привода подач, об/мин.
Уравнение кинематического баланса цепи в развернутом виде:
Количество возможных подач Максимальное и минимальное значения подач:
Smax 1420 6 2400 мм/мин (быстрое перемещение);
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Изучить графические условные обозначения на кинематических схемах по табл.1.
2. Изучить способы соединения детали с валом по табл.1.
3. Изучить винтовой и реечный механизмы для преобразования вращательного движения в прямолинейно-поступательное движение.
4. Изучить типовые механизмы для ступенчатого изменения частоты вращения валов по табл. 2.
5. Закрепить понятие об уравнении кинематического баланса.
6. Провести анализ кинематической схемы станка из приложения по указанию преподавателя, включающий написание уравнений кинематического баланса в общем и развернутом видах для цепи главного движения и цепи подач. Определить количество скоростей вращения шпинделя и количество подач, максимальные и минимальные их значения.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Что называется кинематической схемой станка?
2. Какие передачи наиболее часто встречаются в металлорежущих станках?
3. Что называется передаточным отношением?
4. Чему равно передаточное отношение кинематической цепи?
5. Какие механизмы используются для регулирования частоты вращения?
6. Какие механизмы применяются для изменения направления вращения валов?
7. Как составляется уравнение баланса кинематической цепи?
8. Какие параметры характеризуют кинематическую схему металлорежущего станка?
9. Для чего служит механизм перебора?
10. Характеристика и область применения трех форм записи уравнения кинематического баланса.
11. Какие механизмы в приводах станков используются для преобразования вращательного движения в возвратно-поступательное?
1. Черпаков, Б.И. Металлорежущие станки: Учебник / Б.И. Черпаков, Т.А. Альперович. – М.: Издат. центр Академия, 2008. – 368 с.
2. Черпаков, Б.И. Технологическое оборудование машиностроительного производства: Учебник / Б.И. Черпаков, Л.И. Вереина. – М.: Издат. центр Академия, 2005. – 416 с.
3. Технология конструкционных материалов: Учебное пособие для студентов вузов / Под ред. Комарова О. С. – Минск: Новое знание, 2007. – 567 с.
ПРИЛОЖЕНИЕ
1, 2 – цепи главного движения и подачи токарно-винторезного станка 1А616; 3 – цепь главного движения токарно-затыловочного станка модели К 4, 5 – цепи главного движения и подачи токарно-винторезного станка модели 1К62; 6 – цепь главного движения горизонтально-расточного станка модели 262Г 7, 8 – цепи главного движения и подачи токарно-винторезного станка модели 163; 9 – цепь главного движения токарно-винторезного станка модели 1К 10, 11 – цепи главного движения и подачи токарно-револьверного станка модели 1П365; 12 – цепь главного движения двухстоечного карусельного станка модели 13, 14 – цепи главного движения и подачи радиально-сверлильного станка модели 2В56; 15, – цепи главного движения и подачи радиально-сверлильного станка модели 257; 17 – цепь главного движения горизонтально-расточного станка модели 2620А 18, 19 – цепи главного движения и подачи вертикально-фрезерного станка модели 6Н12ПБ
 «Министерство образования и науки Украины Севастопольский национальный технический университет МЕТОДИЧЕСКИЕ УКАЗАНИЯ к выполнению контрольной работы и подготовке к итоговому контролю по дисциплине Социология для студентов заочной формы обучения всех специальностей Севастополь 2008 Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com) УДК 316 (07) Методические указания к выполнению контрольной работы и подготовке к итоговому контролю по дисциплине Социология. »
«Министерство образования и науки Украины Севастопольский национальный технический университет МЕТОДИЧЕСКИЕ УКАЗАНИЯ к выполнению контрольной работы и подготовке к итоговому контролю по дисциплине Социология для студентов заочной формы обучения всех специальностей Севастополь 2008 Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com) УДК 316 (07) Методические указания к выполнению контрольной работы и подготовке к итоговому контролю по дисциплине Социология. »
«И.В. Ремизов ОСНОВЫ РЕАНИМАТОЛОГИИ ДЛЯ МЕДИЦИНСКИХ СЕСТЕР учебник и практикум Учебное пособие для медицинских училищ и колледжей Рецензент: Ю.П. Савченко — заведующий кафедрой общей хирургии Кубанской государственной медицинской академии, доктор медицинских наук, профессор Учебное пособие написано в соответствии с новым государственным образовательным стандартом, выделившим предмет Основы реаниматологии в отдельную дисциплину, и с программой, разработанной Всероссийским. »
«МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ БРЕСТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра менеджмента и маркетинга МЕТОДИЧЕСКИЕ УКАЗАНИЯ к выполнению практических занятий и курсовой работы по дисциплине Основы менеджмента для студентов специальностей 25 01 09 Маркетинг, 25 01 10 Коммерческая деятельность, 25 01 08 Бухгалтерский учет, анализ и аудит, 25 01 03 Мировая экономика и международные экономические отношения дневной и заочной форм обучения БРЕСТ 2002. »
«Содержание 1. О серии НАГЛЯДНАЯ ШКОЛА 2. Руководство пользователя 2.1. Установка программы и системные требования 2.2. Управление просмотром пособия 2.3. Интерактивные элементы в пособии 3. Применение пособий серии НАГЛЯДНАЯ ШКОЛА в учебном процессе 4. Наглядные пособия по географии 4.1. Возможности интерактивных наглядных пособий 4.2. Перечень наглядных пособий по географии 5. Методическое содержание карт 5.1. Физическая карта мира 5.2. Северная Америка. Физическая карта 5.3. Северная Америка. »
«Минис терс тво образования и науки Самарской облас ти Минис терс тво имущес твенных о тношений Самарской облас ти Государс твенное бюд же тное образова тельное учре ждение среднего профессионального образования Толья т тинский индус триально-педагогический коллед ж (ГБОУ СПО ТИПК) Методические указания по использованию инновационных педагогических технологий на уроках специальных дисциплин специальнос ти 230101 Вычисли тельные машины, сис т емы, комплексы и сет и Толья т ти 2012 Содержание. »
«Единственный путь, ведущий к знаниюдеятельность Б. Шоу План работы творческой группы учителей Реализация ФГОС с помощью технологий деятельностного типа Цель работы творческой группы. Развитие педагогической деятельности по внедрению технологий деятельностного типа в учебно-воспитательный процесс. Задачи: 1. Изучение и обобщение членами группы передового педагогического опыта по направлению технологии деятельностного типа в учебновоспитательном процессе; 2. Внедрение в практику работы школы. »
«1 В.В. РУДСКИЙ РЕСУРСОВЕДЕНИЕ УЧЕБНОЕ ПОСОБИЕ СМОЛЕНСК 2008 2 ББК 65.011.1 Р835 Рудский, В.В. Р 835 Ресурсоведение: учебное пособие / В.В. Рудский. – Смоленск: Издательство СГУ. — 143 с. Данное пособие предназначено для студентов, обучающихся по специальности 013400 – Природопользование. 3 СОДЕРЖАНИЕ Введение..4 Глава 1. Основные понятия и термины курса.5 Глава 2. Природные ресурсы.. Природные ресурсы и природно-ресурсный потенциал. Классификация природных ресурсов. Учет природных ресурсов. »
«Министерство образования и науки Российской Федерации Сыктывкарский лесной институт (филиал) федерального государственного бюджетного образовательного учреждения высшего профессионального образования Санкт-Петербургский государственный лесотехнический университет имени С. М. Кирова Кафедра бухгалтерского учета, анализа, аудита и налогообложения Посвящается 60-летию высшего профессионального лесного образования в Республике Коми Е. В. Морозова, И. В. Лотоцкая УЧЕТ И АНАЛИЗ ВНЕШНЕЭКОНОМИЧЕСКОЙ. »
«1. Абрамова Г.С. Сборник задач по социальной психологии и психологии развития. – М.: Академия, 1999 1. Абчук, В.А. Менеджмент для педагогических специальностей [Текст]: учеб.пособие для студ.сред.проф.учеб.заведений. — М.: Академия, 2010. — 208 с. — (Среднее профессиональное образование) 2. Авидон И. Тренинги формирования команды. – СПб.: Речь, 2008 3. Автор-составитель И. А. Xапилина Азбука народных промыслов, 1-4 классы: дополнительный материал к урокам изобразительного искусства и технологии. »
«1 Научно-учебный центр Бирюч Н.И. Конюхов, О.Н. Архипова, Е.Н. Конюхова ПСИХОЭКОНОМИКА Издание 2-е, дополненное Москва ДеЛи плюс 2012 2 УДК 338.2 ББК 65.050 К65 К65 Психоэкономика [Текст] / Н.И. Конюхов, О.Н. Архипова, Е.Н. Конюхова – М.: ДеЛи плюс, 2012. – 540 с. ISBN В книге на основе анализа развития мировой экономики установлено, что цикличность социально-экономического развития связана с цикличностью изменения психотипов людей, цикличностью солнечной. »
«О.Ф. Бойкова, В.К. Клюев Правовая среда российской библиотеки Учебно-практическое пособие Москва 2011 1 СЕРИЯ БИБЛИОТЕКАРЬ И ВРЕМЯ. ХХI ВЕК. Выпуск № 133 ББК 78.34(2). 757.12 УДК 027.7 Б 18 Ответственный редактор серии О.Р.БОРОДИН Бойкова О.Ф., Клюев В.К. Б 18 Правовая среда российской библиотеки: Учеб.-практ. пособие. — М.: Либерея-Бибинформ, 2011. – 224 с. ISBN Книга посвящена актуальным проблемам правового регулирования библиотечно-информационной деятельности. Прослежена эволюция. »
«Кафедра общей и экспериментальной физики ЮУрГУ Составитель Волегов Ю.В. Челябинск – 2008 г. ОРГАНИЗАЦИЯ КАФЕДРЫ Кафедра Общая и экспериментальная физика была основана как кафедра физики № 2 29 июня 1965 года (приказ №261). Кафедре поручили учебно-методическую работу по факультетам: автотракторному, металлургическому, механико-технологическому, инженерностроительному, вечернему инженерно-строительному, вечернему при ЧМЗ, в филиале г. Златоуста, в УКП г.г. Сима и Усть-Катава, а также по. »
«1. Котельников А. А., Абышев К. И., Алпеева Е. В., Брусенцев А. А. Компьютерное моделирование в сварочном производстве: учебное пособие/ Юго-зап. гос. ун-т. Курск, 2013. 228 с.: ил. 258. 2. Котельников А. А., Крюков В. А., Алпеева Т. В. Производство сварных конструкций: учебное пособие/Курск. гос. техн. ун-т. Курск, 2005. 600 с. 3. Котельников А.А. Производство сварных конструкций: Методические указания к выполнению курсового проекта по дисциплине Производство сварных конструкций / Курск. гос. »
«3 МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ЭКОНОМИКИ И ФИНАНСОВ КАФЕДРА ОБЩЕЙ ЭКОНОМИЧЕСКОЙ ТЕОРИИ МАКРОЭКОНОМИЧЕСКАЯ ПОЛИТИКА ГОСУДАРСТВА И ОСОБЕННОСТИ ЕЕ ОСУЩЕСТВЛЕНИЯ В ОТКРЫТОЙ ЭКОНОМИКЕ УЧЕБНОЕ ПОСОБИЕ Под редакцией канд. экон. наук, проф. Т.Г. Бродской, д-ра экон. наук, проф. Д.Ю. Миропольского
«ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ЭКОНОМИКИ И ФИНАНСОВ КАФЕДРА ПОЛИТОЛОГИИ Н.Е. КОВАЛЕНКО МЕСТНОЕ САМОУПРАВЛЕНИЕ КАК ФОРМА ДЕМОКРАТИИ УЧЕБНОЕ ПОСОБИЕ ИЗДАТЕЛЬСТВО САНКТ-ПЕТЕРБУРГСКОГО ГОСУДАРСТВЕННОГО УНИВЕРСИТЕТА ЭКОНОМИКИ И ФИНАНСОВ ББК 66.3(2 Рос) К Коваленко Н.Е. Местное самоуправление как форма демократии: Учебное пособие.– СПб.: Изд-во СПбГУЭФ, 2008.– 296 с. »
«Администрация Ростовской области Министерство экономики, торговли, международных и внешнеэкономических связей Некоммерческое партнерство Ростовское региональное агентство поддержки предпринимательства МЕТОДИЧЕСКОЕ ПОСОБИЕ В ПОМОЩЬ ПРЕДПРИНИМАТЕЛЮ: СПЕЦИАЛЬНЫЕ РЕЖИМЫ НАЛОГООБЛОЖЕНИЯ Выпуск 2 Ростов-на-Дону 2009 2 ВВЕДЕНИЕ Уважаемые предприниматели! Одним из ключевых вопросов ведения любого бизнеса является налогообложение. Знание действующего налогового законодательства, умение оперативно. »
«Положение учитывает международные права и обязательства Российской Федерации в сфере послевузовского образования. 1.2. Целями организации учебного процесса в аспирантуре Академии по системе зачетных единиц трудоемкости являются: развитие компетентностно-ориентированного послевузовского профессионального образования; — обеспечение соответствия процесса послевузовского профессионального образования образовательным критериям качества. 1.3. Организация учебного процесса в аспирантуре по системе. »
«Транспортно-энергетический факультет Кафедра Эксплуатация автомобильного транспорта Методические указания к выполнению курсового проекта по дисциплине по дисциплине Грузовые перевозки для направления подготовки бакалавриата 190700.62 Технология транспортных процессов (БТТП) Профиль бакалавриата – Организация перевозок и управление на транспорте (автомобильный транспорт) УММО разработано в соответствии с уставом УМКД УММО разработала Жевтун И.Ф._ УММО утверждено на заседании кафедры Протокол №_. »
«Международный консорциум Электронный университет Московский государственный университет экономики, статистики и информатики Евразийский открытый институт Е.С. Соколова Бухгалтерский учет Учебное пособие Москва 2008 1 УДК 657 ББК 65.052 C 594 Соколова Е.С. БУХГАЛТЕРСКИЙ УЧЕТ: Учебно-методический комплекс. – М.: Изд. центр ЕАОИ. – 2008. – 200 с. ISBN 5-374-00025-Х © Соколова Е.С., 2008 © Евразийский открытый институт, 2008 2 Содержание Введение Глава 1. Сущность и содержание бухгалтерского учета. »
«ПНЕВМАТИЧЕСКИЕ ИСПЫТАНИЯ УЧАСТКА ТРУБОПРОВОДА Издательство ТГТУ Министерство образования и науки Российской Федерации ГОУ ВПО Тамбовский государственный технический университет ПНЕВМАТИЧЕСКИЕ ИСПЫТАНИЯ УЧАСТКА ТРУБОПРОВОДА Методические разработки для студентов 4 курса специальностей 140106 Энергообеспечение предприятий и 140211 Электроснабжение промышленных предприятий всех форм обучения Тамбов Издательство ТГТУ 2010 УДК 620.162.4 ББК О71-07я73-5 П408 Рекомендовано Редакционно-издательским. »
2014 www.av.disus.ru — «Бесплатная электронная библиотека — Авторефераты, Диссертации, Монографии, Программы»
Материалы этого сайта размещены для ознакомления, все права принадлежат их авторам.
Если Вы не согласны с тем, что Ваш материал размещён на этом сайте, пожалуйста, напишите нам, мы в течении 1-2 рабочих дней удалим его.
Кинематическая настройка станков
Кинематическую настройку станка производят для обеспечения необходимых перемещений конечных звеньев кинематической цепи и для получения заданных формы и размеров детали, которая в основном сводится к определению параметров органа настройки. Расчетные перемещения звеньев определяют исходя из формы поверхности, которая должна быть образована на заготовке, и вида режущего инструмента.
Затем по кинематической цепи составляют уравнение кинематического баланса, связывающее начальное и конечное перемещения, и находят зависимость параметра органа настройки от расчетных перемещений и постоянных цепи.
Кинематическая цепь
Кинематическая цепь составляется из движущихся сопряженных между собой и передающих друг другу движения деталей. Если началом кинематической цепи является электродвигатель (рис. 3,б), то можно найти связь между начальным и конечным звеньями:

где n, nшп — частота вращения начального и конечного звеньев; np, ip — КПД и передаточное отношение ременной передачи.
Для удобства вычислений рекомендуется в уравнении кинематического баланса (4.1) выделить постоянные величины структурной формулы и подсчитать их как коэффициент данной кинематической цепи, например:

Это выражение справедливо и для станков, в цепи главного движения которых в качестве органа настройки используется коробка скоростей. Тогда в выражении (4.2) iv будет передаточным отношением коробки скоростей.
Уравнение кинематического баланса
Уравнение кинематического баланса для цепи главного вращательного движения имеет вид (об/с)
nc i = nk, (4.3) , где nc и nk— частота вращения соответственно начального и конечного звена, об/с; i- передаточное отношение кинематической цепи.
Уравнение кинематического баланса для цепи, у которой начальное звено имеет вращательное движение, а конечное — прямолинейное, будет (мм/с)
nc i H = Sc, где Н — ход кинематической пары, преобразующей вращательное движение в прямолинейное, мм/об; sc — линейное перемещение конечного звена, мм/с.
Величина хода
Величина хода равна перемещению прямолинейно движущегося звена за один оборот вращающегося звена. Для винтовой пары (винт — гайка)
H = k tв (4.4), где tв — шаг ходового винта, мм; k — число заходов.
Для реечной передачи.
H = π m z, где m — модуль зацепления, мм; z — число зубьев реечного колеса.
На этом основании уравнение кинематического баланса для секундной подачи (мм/с):
для цепи с винтовой парой

для реечной передачи

Уравнение кинематического баланса для оборотной подачи (мм/об)

где s — линейное перемещение конечного звена, мм/об.
Из уравнений (4.5)-(4.7) определяют передаточное отношение органа настройки. Например, из уравнения (4.2) находят

Это выражение является формулой настройки сменных колес гитары скоростей цепи (см. рис. 3,б).
Выводы
Анализ структурных схем металлорежущих станков позволяет сделать следующие выводы. Кинематическая структура станков зависит от геометрической формы, размеров обрабатываемой поверхности и метода обработки. Чем меньше необходимое число исполнительных формообразующих движений, тем меньше кинематических цепей в структуре станка, тем проще его кинематика и конструкция. Существенное значение имеют и другие факторы, например точность и шероховатость поверхности, динамика резания, условия обслуживания станка, а также экономические факторы.
Практическая работа №10 «Составление уравнения кинематических цепей зубообрабатывающего станка»»

Инструкционная карта по дисциплине «Обработка металлов резанием, станки и инструменты» к практической работе №10 на тему «Составление уравнения кинематических цепей зубообрабатывающего станка» измененная и дополненная.
Просмотр содержимого документа
«Практическая работа №10 «Составление уравнения кинематических цепей зубообрабатывающего станка»»»
ИНСТРУКЦИОННАЯ КАРТА № 10
ПО ДИСЦИПЛИНЕ «ОБРАБОТКА МЕТАЛЛОВ РЕЗАНИЕМ, СТАНКИ И ИНСТРУМЕНТЫ»
Тема 6.3 Зубообрабатывающие станки
ПРАКТИЧЕСКАЯ РАБОТА №10
Тема «Составление уравнения кинематических цепей зубообрабатывающего станка»
Цель работы: Сформировать навыки составления уравнения кинематических цепей зубообрабатывающего станка.
Оборудование: Справочная литература, инструкционная карта, калькулятор.
Зубофрезерный станок, https://www.youtube.com/watch?v=QaQ1dYfn6Oc
Настройка зубофрезерного станка,
Справочник технолога-машиностроителя. Т.2./Под ред. А.Г. Косиловой и Р.К. Мещерякова. — М.: Машиностроение, 1986
Среди различных зубообрабатывающих станков наиболее распространены зубофрезерные станки, работающие червячной фрезой. К таким станкам относится станок 5М324А, конструктивные особенности которого во многом характерны для станков зубофрезерной группы. Станок предназначен для нарезания цилиндрических и червячных зубчатых колес в условиях крупносерийного и серийного производства.
Устройство зубофрезерного станка 5М324А (5К324А)
Станок 5М324А (рисунок 1) состоит из станины 1, на которой жестко закреплена стойка 8 и перемещается стол 17, с контрподдержкой 15. По направляющим стойки в вертикальном направлении перемещается каретка 11 с суппортом 13, несущим инструмент. В станине 1 размещены коробка 2 со сменными зубчатыми колесами гитары главного движения. Главный электродвигатель, приводящий во вращение стол с нарезаемым зубчатым колесом 23 и инструментальный шпиндель с червячной фрезой 24, находится с задней стороны станины. В станине размещен транспортер стружки, приводимый во вращение от отдельного электродвигателя. Резервуар для СОЖ находится в станине, откуда она насосом подается в зону обработки, а ее количество регулируется краном 12. Стойка 8 служит для размещения коробки 3 с механизмами перемещения каретки 11, которую можно перемещать вручную за квадрат 5 или автоматически, поворачивая рукоятку 4 в положение включения автоматической подачи. Под крышкой в находятся сменные зубчатые колеса гитары деления и сменные зубчатые колеса гитары дифференциала. На передней стенке стойки укреплен пульт управления 7. Каретка 11 снабжена передвигаемыми упорами 9 и 10, которые регулируют величину хода каретки. Упоры воздействуют на расположенные в стойке конечные выключатели, отключающие электродвигатель вертикального перемещения каретки. В корпусе стола 17 находится шпиндель, на котором устанавливают нарезаемое зубчатое колесо 23. Сверху корпуса стола 17 жестко закрепленаконтрподдержка 15 с поворотным кронштейном 14, который служит для центрирования оправки с заготовкой. Кронштейн поднимается и опускается гидроцилиндром, управляемым вручную краном 16. Корпус стола 17 можно перемещать вручную, вращая винт с квадратом 19. Рукояткой 18 устанавливают в определенное положение упоры стола. Вращением вручную валика 21 осуществляют смазку механизмов, расположенных в столе. На корпусе стола размещены упоры 20 и 22, которые нажимают на конечные выключатели, дающие команду на ускоренный подвод стола. По точности станок соответствует классу H (нормальная точность) и обладает высокой степенью автоматизации. Основные технические данные зубофрезерного станка 5М324А:
— Наибольший диаметр нарезаемых прямозубых колес, мм 500
— Наибольший модуль нарезаемых колес, мм 8
— Наибольшая длина зуба нарезаемых прямозубых колес, мм 350
— Наибольший угол наклона зубьев, град ±60
— Наименьшее число нарезаемых зубьев 12
— Наибольшие размеры устанавливаемой червячной фрезы, мм:
— Частота вращения червячной фрезы, об/мин 50 . . . 315
— Пределы вертикальной подачи червячной фрезы, мм /об 0,68 . . . 6,10
— Пределы радиальной подачи стола, мм/об 0,20 . 1,85
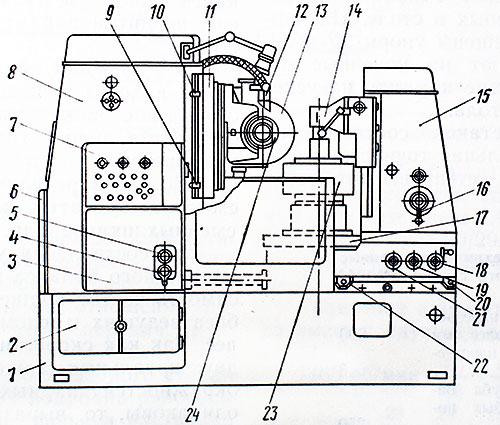
Рисунок 1 — Зубофрезерный станок 5М324А:
1 — станина, 2— коробка скоростей, 3 — распределительная коробка, 4 — валик ручного перемещения каретки, S — рукоятка автоматического перемещения каретки, 6 — коробка деления, 7 — пульт управления, 8 — стойка, 9, 10 — упоры регулирования хода каретки, 11 — каретка, 12 — кран охлаждения, 13 — суппорт, 14 — кронштейн, 15 — контрподдержка, 16 — кран перемещения кронштейна, 17 — стол, 18 — рукоятка установки упоров, 19 — винт перемещения стола, 20, 22 — упоры подвода стола, 21 — рукоятка смазки стола, 23 — заготовка, 24 — червячная фреза
В станке инструмент и заготовка связаны между собой и с источником движения, которым чаще всего является электродвигатель. Последовательный ряд сцепляющихся пар зубчатых, червячных и ременных передач, по которым вращение от какого-либо вала передается исполнительному органу, называют кинематической цепью. Так как параметры обработки зубчатых колес разнообразны и зависят от числа обрабатываемых зубьев, модуля, применяемого инструмента и т. д., то каждая кинематическая цепь имеет свой орган настройки. Кинематическая настройка станка в основном сводится к определению параметров органов настройки, с помощью которых должно быть достигнуто необходимое перемещение конечных звеньев кинематической цепи. Такие перемещения называют расчетными и используют для составления уравнения кинематического баланса, в которое еще входит и параметр органа настройки. Из уравнения кинематического баланса находят зависимость параметра органа настройки от постоянных коэффициентов цепи. Такая зависимость называется формулой настройки. По ней определяют числа зубьев сменных зубчатых колес, диаметры сменных шкивов и др. При составлении уравнения кинематического баланса используют зависимость частот вращения от чисел зубьев ведущих и ведомых зубчатых колес. Так как скорости вращения точек двух начальных (тоже и делительных) окружностей парных зубчатых колес одинаковы, то, выразив их через диаметр и частоту вращения, можно записать π*d1*n1 = π*d2*n2 или, заменив диаметр зубчатого колеса на его выражение через модуль и число зубьев, имеем π*mz1*n1 = π*mz2*n2.
где n2 — частота вращения ведомого зубчатого колеса; n1 — частота вращения ведущего зубчатого колеса; z1/z2 — передаточное отношение (i) зубчатой передачи. Передаточное отношение кинематической цепи, связывающее вращение каких-либо ее валов, равно произведению передаточных отношений составляющих эту цепь передач: ie = i1*i2*i3.
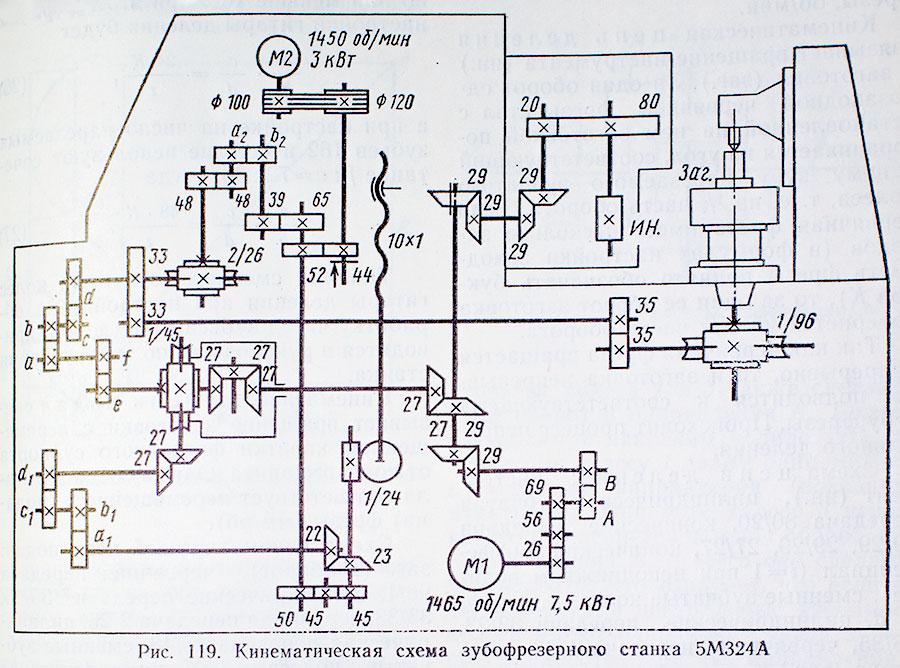
Рисунок 2 – Кинематическая схема зубофрезерного станка
На примере зубофрезерного станка 5М324А (рисунок 2) подробно разберем методику вывода формул настройки кинематических цепей зубообрабатывающих станков. Кинематическая схема станка слагается из следующих кинематических цепей: главного движения, деления, подач и дифференциала.
Цепь главного движения связывает вращение инструмента (ин.) с вращением главного электродвигателя следующим образом: электродвигатель М1 (1465об/мин), цилиндрические зубчатые передачи 26/56, 56/69, сменные зубчатые колеса А и В, конические зубчатые колеса 29/29, 29/29, 29/29, цилиндрическая передача 20/80, инструмент. Уравнение кинематического баланса имеет следующее выражение:

Конечные звенья обозначены: заг. — заготовка, ин. — инструмент, M1, М2 — электродвигатели. Решая это уравнение, находим формулу настройки гитары главного движения
где А и В — числа зубьев сменных зубчатых колес; nфр — частота вращения фрезы, об/мин.
Кинематическая цепь деления связывает вращение инструмента (ин.) и заготовки (заг.). За один оборот однозаходной червячной фрезы стол с установленной на нем заготовкой поворачивается на угол, соответствующий одному зубу нарезаемого зубчатого колеса, т. е. на 1/z часть оборота. Если червячная фреза имеет несколько заходов (в формулах настройки заходность фрезы принято обозначать буквой К), то за один ее оборот заготовка повернется на K/z часть оборота. Так как червячная фреза вращается непрерывно, то и заготовка непрерывно подводится к соответствующему зубу фрезы. Происходит процесс непрерывного деления. Схема цепи деления: инструмент (ин.), цилиндрическая зубчатая передача 80/20, конические передачи 29/29, 29/29, 27/27, конический дифференциал (i=1 при неподвижномводиле), сменные зубчатые колеса е, f, а, b, с, d, цилиндрические передачи 33/33, 35/35, червячная передача 1/96, заготовка (заг.). Орган настройки этой кинематической цепи со сменными зубчатыми колесами а, b, с, d, е и f называют гитарой деления. Уравнение кинематического баланса:

отсюда находим формулу настройки гитары деления, включающую в искомой части зубчатые колеса с числами зубьев а, Ь, с и d:
Зубчатые колеса е и f устанавливают на постоянные оси в двух сочетаниях чисел зубьев:
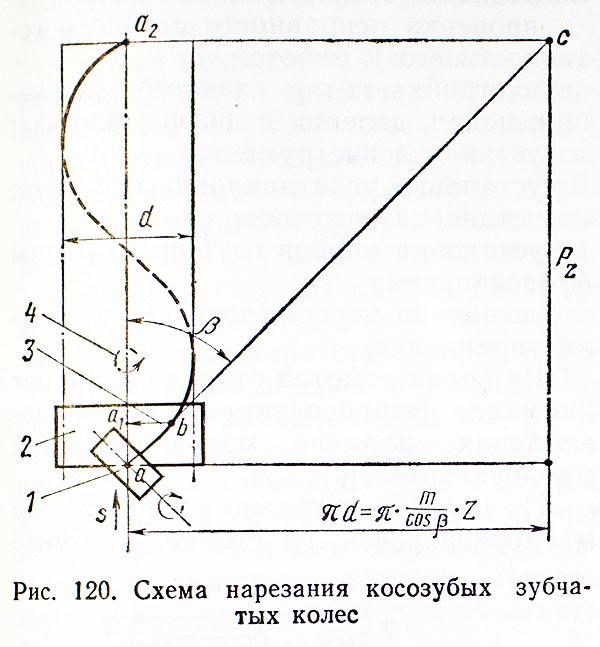
Рисунок 3 — Схема нарезания косозубых зубчатых колёс
Первое сочетание используют, если число зубьев нарезаемого колеса равно или меньше 161, при этом формула настройки гитары деления будет

а при настройке на число нарезаемых зубьев 162 и больше используют сочетание f : е = 72 : 36, тогда

Таблица сменных зубчатых колес гитары деления при настройке на обработку чисел зубьев от 12 до 200 приводится в руководстве по эксплуатации станка. Кинематическая цепь подач связывает вращение заготовки с перемещением каретки фрезерного суппорта от ходового винта. Одному обороту стола соответствует перемещение s (подача) фрезы (мм/об). Схема кинематической цепи подач: заг. (1 оборот), червячная передача 96/1, цилиндрические передачи 35/35, 33/33, червячная передача 2/26, цилиндрическая передача 48/48, сменные зубчатые колеса а2, b2, цилиндрические передачи 39/65, 50/45, 45/45, червячная передача 1/24, ходовой винт 10×1, суппорт. Уравнение кинематического баланса:

Отсюда получаем формулу настройки гитары подач где а2 и b2 — числа зубьев сменных зубчатых колес; s — величина вертикальной подачи, мм/об.

Кинематическая цепь дифференциала включается при нарезании косозубых зубчатых колес и связывает вращение заготовки с ходовым винтом вертикальной подачи (10×1). Схема нарезания таких зубчатых колес приведена на рис. 120. Нарезается правое зубчатое колесо 2 с перемещением червячной фрезы 1 в направлении снизу вверх вдоль оси зубчатого колеса, которое вращается в направлении 4. При перемещении фрезы из точки «а» в точку «a1», точка «b» зубчатого колеса также должна переместиться в точку «a1» — в данном случае в направлении 3, противоположном основному вращению 4. При прохождении фрезой пути из точки «а» в точку «а2», равного ходу зуба Pz, заготовка повернется на один оборот в направлении 3. Из геометрических построений, приведенных на рисунке 3, получим ход зуба по делительной окружности

В этой кинематической цепи основную роль играет механизм, называемый дифференциалом, назначение которого суммировать два вращательных движения (складывать или вычитать). В зубообрабатывающих станках применяют цилиндрические и конические дифференциалы. Принцип работы конического дифференциала показан на рисунке 4. Повернем мысленно весь дифференциал вокруг центральной оси I—III на один оборот в направлении А.
При этом зубчатые колеса 1 и 3 также сделают один оборот в направлении А.
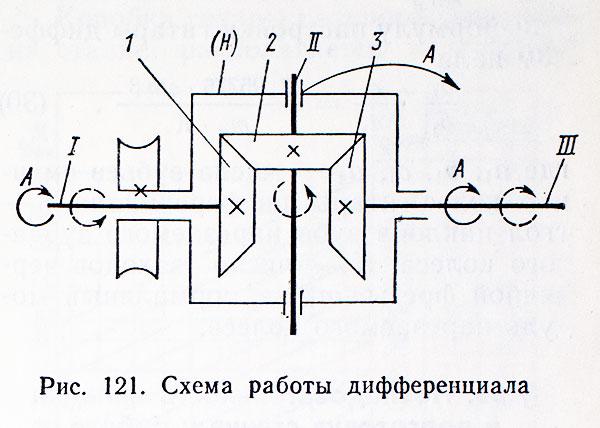
Рисунок 4 – Схема работы дифференциала
Теперь остановим и закрепим водило (H), а зубчатому колесу 1 дадим один оборот в обратном направлении (показано пунктиром). При этом колесо 3 через колесо 2 повернется на один оборот, но в направлении А, а всего оно сделает два оборота. Это означает, что если в дифференциале центральные зубчатые колеса имеют одинаковые числа зубьев и вращаются в разные направления, то передаточное отношение от водила к любому из центральных колес равно 2. Теперь снова вернемся к кинематической схеме (см. рисунок 2) и составим уравнение кинематического баланса цепи дифференциала, учитывая, что при перемещении инструмента на величину хода зуба (Pz) заготовка повернется на один оборот. Схема цепи дифференциала: ходовой винт 10×1, червячная передача 24/1, коническая передача 23/22, сменные зубчатые колеса гитары дифференциала a1b1c1d1, коническая передача 27/27, червячная передача 1/45, дифференциал (i=2), сменные зубчатые колеса гитары деления (i = 24K/z), цилиндрические передачи 33/33, 35/35, червячная передача 1/96, заготовка. Уравнение кинематического баланса:

Подставив в это уравнение значение Pz и преобразовав его, получим формулу настройки гитары дифференциала
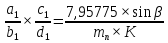
где a1, b1, c1, d1 — числа зубьев сменных колес гитары дифференциала, β — угол наклона зуба нарезаемого зубчатого колеса, К — число заходов червячной фрезы, mn — нормальный модуль нарезаемого колеса.
Посмотреть видео 1. Изучить устройство зубофрезерного станка 5М324А.
Посмотреть видео 2. Изучить схемы цепи главного движения, цепи деления, цепи подач и цепи дифференциала. Изучить уравнения кинематического баланса и вывод формулы настроек гитары главного движения, гитары деления, гитары подач и гитары дифференциала.
Составить уравнения кинематического баланса и вывести формулы настроек гитары главного движения, гитары деления, гитары подач и гитары дифференциала.
Ответить на контрольные вопросы.
Составить уравнения кинематического баланса и вывести формулы настроек гитары главного движения, гитары деления.
Составить уравнения кинематического баланса и вывести формулы настроек гитары главного движения, гитары деления, гитары подач.
Составить уравнения кинематического баланса и вывести формулы настроек гитары главного движения, гитары деления, гитары подач и гитары дифференциала.
Цепь главного движения: электродвигатель М1 (1500 об/мин), цилиндрические зубчатые передачи 26/56, 56/69, сменные зубчатые колеса А и В, конические зубчатые колеса 27/27, 27/27, 27/27, цилиндрическая передача 20/80, инструмент.
Цепь деления: инструмент (ин.), цилиндрическая зубчатая передача 80/20, конические передачи 27/27, 27/27, 27/27, конический дифференциал (i=1 при неподвижномводиле), сменные зубчатые колеса е, f, а, b, с, d, цилиндрические передачи 33/33, 35/35, червячная передача 1/90, заготовка (заг.).
Цепь подач: заг. (1 оборот), червячная передача 90/1, цилиндрические передачи 35/35, 33/33, червячная передача 2/26, цилиндрическая передача 48/48, сменные зубчатые колеса а2, b2, цилиндрические передачи 39/65, 50/45, 45/45, червячная передача 1/24, ходовой винт 10×1, суппорт.
Цепи дифференциала: ходовой винт 10×1, червячная передача 24/1, коническая передача 23/22, сменные зубчатые колеса гитары дифференциала a1b1c1d1, коническая передача 27/27, червячная передача 1/45, дифференциал (i=2), сменные зубчатые колеса гитары деления (i = 24K/z), цилиндрические передачи 33/33, 35/35, червячная передача 1/90, заготовка.
Цепь главного движения: электродвигатель М1 (1400 об/мин), цилиндрические зубчатые передачи 26/56, 56/69, сменные зубчатые колеса А и В, конические зубчатые колеса 29/29, 29/29, 29/29, цилиндрическая передача 20/80, инструмент.
Цепь деления: инструмент (ин.), цилиндрическая зубчатая передача 80/20, конические передачи 29/29, 29/29, 27/27, конический дифференциал (i=1 при неподвижномводиле), сменные зубчатые колеса е, f, а, b, с, d, цилиндрические передачи 33/33, 35/35, червячная передача 1/96, заготовка (заг.).
Цепь подач: заг. (1 оборот), червячная передача 96/1, цилиндрические передачи 35/35, 33/33, червячная передача 2/26, цилиндрическая передача 48/48, сменные зубчатые колеса а2, b2, цилиндрические передачи 39/65, 50/45, 45/45, червячная передача 1/24, ходовой винт 10×1, суппорт.
Цепи дифференциала: ходовой винт 10×1, червячная передача 24/1, коническая передача 23/22, сменные зубчатые колеса гитары дифференциала a1b1c1d1, коническая передача 27/27, червячная передача 1/45, дифференциал (i=2), сменные зубчатые колеса гитары деления (i = 24K/z), цилиндрические передачи 33/33, 35/35, червячная передача 1/96, заготовка.
Цепь главного движения: электродвигатель М1 (1450 об/мин), цилиндрические зубчатые передачи 26/56, 56/69, сменные зубчатые колеса А и В, конические зубчатые колеса 29/29, 29/29, 27/27, цилиндрическая передача 20/80, инструмент.
Цепь деления: инструмент (ин.), цилиндрическая зубчатая передача 80/20, конические передачи 29/29, 29/29, 27/27, конический дифференциал (i=1 при неподвижномводиле), сменные зубчатые колеса е, f, а, b, с, d, цилиндрические передачи 33/33, 35/35, червячная передача 1/86, заготовка (заг.).
Цепь подач: заг. (1 оборот), червячная передача 86/1, цилиндрические передачи 35/35, 33/33, червячная передача 2/26, цилиндрическая передача 48/48, сменные зубчатые колеса а2, b2, цилиндрические передачи 39/65, 50/45, 45/45, червячная передача 1/24, ходовой винт 10×1, суппорт.
Цепи дифференциала: ходовой винт 10×1, червячная передача 24/1, коническая передача 23/23, сменные зубчатые колеса гитары дифференциала a1b1c1d1, коническая передача 27/27, червячная передача 1/45, дифференциал (i=2), сменные зубчатые колеса гитары деления (i = 24K/z), цилиндрические передачи 33/33, 35/35, червячная передача 1/96, заготовка.
Цепь главного движения: электродвигатель М1 (1460 об/мин), цилиндрические зубчатые передачи 26/56, 56/69, сменные зубчатые колеса А и В, конические зубчатые колеса 29/29, 29/29, 29/29, цилиндрическая передача 20/80, инструмент.
Цепь деления: инструмент (ин.), цилиндрическая зубчатая передача 80/20, конические передачи 29/29, 29/29, 27/27, конический дифференциал (i=1 при неподвижномводиле), сменные зубчатые колеса е, f, а, b, с, d, цилиндрические передачи 33/33, 35/35, червячная передача 1/92, заготовка (заг.).
Цепь подач: заг. (1 оборот), червячная передача 92/1, цилиндрические передачи 35/35, 33/33, червячная передача 2/26, цилиндрическая передача 48/48, сменные зубчатые колеса а2, b2, цилиндрические передачи 39/65, 50/45, 45/45, червячная передача 1/24, ходовой винт 10×1, суппорт.
Цепи дифференциала: ходовой винт 10×1, червячная передача 24/1, коническая передача 23/23, сменные зубчатые колеса гитары дифференциала a1b1c1d1, коническая передача 27/27, червячная передача 1/45, дифференциал (i=2), сменные зубчатые колеса гитары деления (i = 24K/z), цилиндрические передачи 33/33, 35/35, червячная передача 1/92, заготовка.
Цепь главного движения: электродвигатель М1 (1450 об/мин), цилиндрические зубчатые передачи 26/56, 56/69, сменные зубчатые колеса А и В, конические зубчатые колеса 29/29, 29/29, 29/29, цилиндрическая передача 10/40, инструмент.
Цепь деления: инструмент (ин.), цилиндрическая зубчатая передача 40/10, конические передачи 29/29, 29/29, 27/27, конический дифференциал (i=1 при неподвижномводиле), сменные зубчатые колеса е, f, а, b, с, d, цилиндрические передачи 33/33, 35/35, червячная передача 1/98, заготовка (заг.).
Цепь подач: заг. (1 оборот), червячная передача 98/1, цилиндрические передачи 35/35, 33/33, червячная передача 2/26, цилиндрическая передача 48/48, сменные зубчатые колеса а2, b2, цилиндрические передачи 39/65, 50/45, 45/45, червячная передача 1/24, ходовой винт 10×1, суппорт.
Цепи дифференциала: ходовой винт 10×1, червячная передача 24/1, коническая передача 23/22, сменные зубчатые колеса гитары дифференциала a1b1c1d1, коническая передача 27/27, червячная передача 1/45, дифференциал (i=2), сменные зубчатые колеса гитары деления (i = 24K/z), цилиндрические передачи 33/33, 35/35, червячная передача 1/98, заготовка.
Цепь главного движения: электродвигатель М1 (1460 об/мин), цилиндрические зубчатые передачи 26/56, 56/69, сменные зубчатые колеса А и В, конические зубчатые колеса 27/27, 27/27, 27/27, цилиндрическая передача 20/60, инструмент.
Цепь деления: инструмент (ин.), цилиндрическая зубчатая передача 60/20, конические передачи 27/27, 27/27, 29/29, конический дифференциал (i=1 при неподвижномводиле), сменные зубчатые колеса е, f, а, b, с, d, цилиндрические передачи 35/35, 37/37, червячная передача 1/80, заготовка (заг.).
Цепь подач: заг. (1 оборот), червячная передача 80/1, цилиндрические передачи 35/35, 33/33, червячная передача 2/26, цилиндрическая передача 48/48, сменные зубчатые колеса а2, b2, цилиндрические передачи 39/65, 50/45, 45/45, червячная передача 1/24, ходовой винт 10×1, суппорт.
Цепи дифференциала: ходовой винт 10×1, червячная передача 24/1, коническая передача 23/23, сменные зубчатые колеса гитары дифференциала a1b1c1d1, коническая передача 29/29, червячная передача 1/45, дифференциал (i=2), сменные зубчатые колеса гитары деления (i = 24K/z), цилиндрические передачи 33/33, 35/35, червячная передача 1/80, заготовка.
К какой группе и типу относится станок 5М324А? Расшифруйте марку станка.
Какие зубообрабатывающие станки наиболее распространены?
Перечислите основные конструктивные элементы станка 5М324А. Какому классу точности соответствует станок?
Наибольший диаметр нарезаемых прямозубых колес у станка 5М324А?
Наибольший модуль нарезаемых колес у станка 5М324А?
Что называют кинематической цепью станка?
Какая зависимость называется формулой настройки?
Из каких кинематических цепей складывается кинематическая схема станка?
Что связывает цепь главного движения?
Что связывает кинематическая цепь деления?
Что связывает кинематическая цепь подач?
Что связывает кинематическая цепь дифференциала?
Вывод: в ходе выполнения практической работы мы изучили …………. приобрели навыки …………