- Уравнение кинематического баланса привода
- Курсач. Кинематический расчёт привода
- Составление уравнений кинематического баланса
- Пример выполнения работы
- ОСНОВЫ КИНЕМАТИЧЕСКОЙ НАСТРОЙКИ СТАНКОВ
- УРАВНЕНИЯ КИНЕМАТИЧЕСКОГО БАЛАНСА И ФОРМУЛЫ НАСТРОЙКИ
- § 2. МЕТОДИКА КИНЕМАТИЧЕСКОЙ НАЛАДКИ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ.
- Кинематическая настройка станков
- Кинематическая цепь
- Уравнение кинематического баланса
- Величина хода
- Выводы
Уравнение кинематического баланса привода
Числа зубьев шестерен.
Группы передач.
Иллюстрация схемы.
Кинематическая схема привода.
Иллюстрация кинематической схемы исследуемого узла приведена на рис.1.
Исследуемый узел включает в себя валы : I, II, III, IV, V, VI, VII, VIII, IX, X, XI, XII, XIII;
В приводе имеются следующие группы передач:
a – расположена между валами II и III, включает в себя два поочередно вводимых в зацепление блока (z3, z5) и (z7, z9) на четыре скорости.
b — расположена между валами III и IV, на две скорости.
c — расположена между валами V и VI, на две скорости.
Обозначим число скоростей в группе a – Pa = 4; b – Pb = 2; c – Pc = 2.
Согласно паспортных данных [1] исследуемого станка запишем числа зубьев, шаги и пр. параметры каждого элемента кинематической цепи привода [табл.1].
| z1 = 38 | z10 = 33 | z19 = 28 | z28 = 22 |
| z2 = 57 | z11 = 24 | z20 = 43 | z29 = 44 |
| z3 = 22 | z12 = 48 | z21 = 54 | z30 = 22 |
| z4 = 44 | z13 = 32 | z22 = 32 | K1 = 2 |
| z5 = 26 | z14 = 25 | z23 = 36 | K2 = 1 |
| z6 = 40 | z15 = 50 | z24 = 18 | t1 = p × 8 |
| z7 = 29 | z16 = 20 | z25 = 36 | |
| z8 = 37 | z17 = 64 | z26 = 30 | |
| z9 = 33 | z18 = 56 | z27 = 30 |
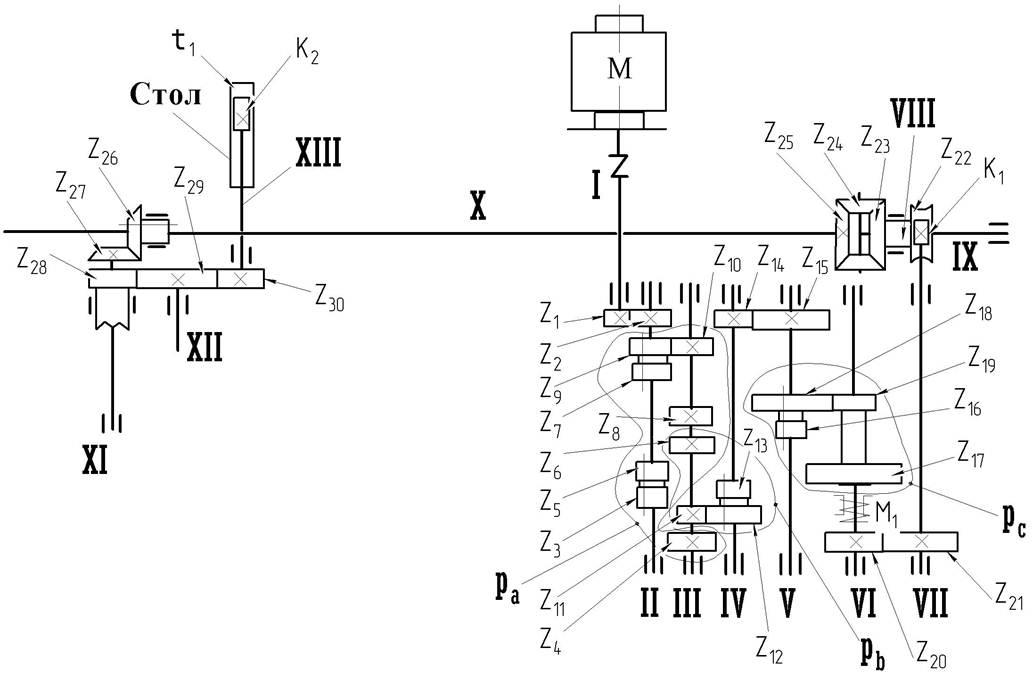
Рис.1 Кинематическая схема



Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Курсач. Кинематический расчёт привода
| Название | Кинематический расчёт привода |
| Дата | 26.07.2021 |
| Размер | 269.92 Kb. |
| Формат файла |  |
| Имя файла | Курсач.docx |
| Тип | Документы #225410 |
| страница | 3 из 8 |
 С этим файлом связано 4 файл(ов). Среди них: lab5OTC.doc, task_283704 сопромт.docx, task_289566.pdf, KOMPAS — АД.cdw.pdf. Показать все связанные файлы Подборка по базе: Практическа работа Оценка и расчет искусственного освещения прои, Готовая курсовая 1 курс Электрооборудование главного привода маг, Теплотехнический расчет.Вариант6.г.Ачинск.МуравскаяВ.СУЗ20П1.pdf, ацетальдегид расчет.docx, Оценка уровней шума в помещениях Расчет средств защиты от шума.d, 83959 Методика расчета изменения экономических показателей при о, Краснова расчет освещения.docx, Мой курсач.doc, 3.1 Расчет затрат на проведение отдельных видов работ.docx, Вайнер А.Я. Тактические расчеты (1982) (2).djvu С этим файлом связано 4 файл(ов). Среди них: lab5OTC.doc, task_283704 сопромт.docx, task_289566.pdf, KOMPAS — АД.cdw.pdf. Показать все связанные файлы Подборка по базе: Практическа работа Оценка и расчет искусственного освещения прои, Готовая курсовая 1 курс Электрооборудование главного привода маг, Теплотехнический расчет.Вариант6.г.Ачинск.МуравскаяВ.СУЗ20П1.pdf, ацетальдегид расчет.docx, Оценка уровней шума в помещениях Расчет средств защиты от шума.d, 83959 Методика расчета изменения экономических показателей при о, Краснова расчет освещения.docx, Мой курсач.doc, 3.1 Расчет затрат на проведение отдельных видов работ.docx, Вайнер А.Я. Тактические расчеты (1982) (2).djvu |
Составление уравнений кинематического баланса
Уравнения кинематического баланса представляют собой выражения, связывающие частоты вращения приводящего вала двигателя и приводимого шпинделя кинематическими передачами.
Допустимая погрешность частот вращения шпинделя зависит от знаменателя геометрического ряда.

[Δn] – допустимая погрешность частот вращения шпинделя.
 .
.

Δn – погрешность частот вращения шпинделя.

i – передаточное отношение ремённой передачи.
Пример выполнения работы




![]()
![]()
1. В качестве примера использован привод главного движения станка представленный на рис. 9. Источником движения в данном приводе является электродвигатель с частотой вращения n =1440 об/мин. Вращение с вала электродвигателя на вал I привода осуществляется с помощью ременной передачи с диаметрами шкивов 140 мм (ведущий шкив) и 320 мм (ведомый шкив). На валу I находится блок из трех зубчатых колес с числом зубьев 42, 47, 37. С помощью этого блока зубчатых колес вращение передается на зубчатые колеса 42, 37, 47, находящиеся на валу II. Передача вращения с вала II на вал III также производится с помощью блока 27, 58, 42 и зубчатых колес 68, 37, 53.
2. На кинематической схеме привода показывается связь элементов с валами.
При обозначении связей элементов с валами учитываются следующие положения:
― все показанные на схеме элементы должны быть задействованы в работе;
― сумма зубьев вступающих в работу элементов двух соседних валов должна быть одинаковой (для зубчатых пар колес с одинаковым модулем);
― должна быть исключена возможность одновременной передачи двумя способами между соседними валами.
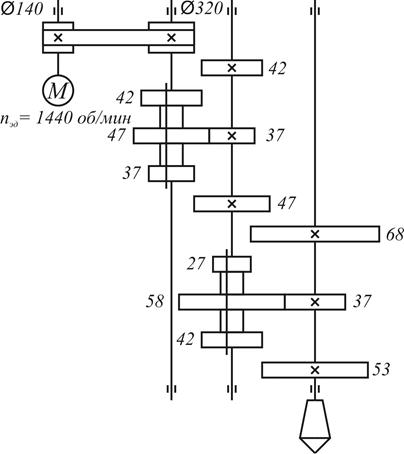
Рис. 9. Кинематическая схема привода главного движения станка
3. Составляем уравнение кинематического баланса привода главного движения в развернутом виде

 ,
,
где  ‑ частота вращения на шпинделе,
‑ частота вращения на шпинделе,  ‑ частота вращения электродвигателя, nЭД =1440 об/мин,
‑ частота вращения электродвигателя, nЭД =1440 об/мин,  ‑ передаточное отношение ременной передачи,
‑ передаточное отношение ременной передачи,  ,
,  — передаточное отношение с I вала на II вал,
— передаточное отношение с I вала на II вал,  ,
,  — передаточное отношение с II вала на III вал,
— передаточное отношение с II вала на III вал,  .
.
4. Определяем число ступеней регулирования m привода главного движения. Число ступеней регулирования определяется произведением числа групп передач. На данной схеме передача вращения реализуется следующим образом:
― передача с вала электродвигателя на первый вал привода осуществляется одним способом – с помощью ременной передачи;
― передача с первого вала на второй может быть осуществлена тремя способами – с помощью подвижного блока зубчатых колес с числами зубьев 42, 47, 37;
― передача со второго вала на третий может быть осуществлена тремя способами – с помощью подвижного блока зубчатых колес с числами зубьев 27, 58, 42.
Таким образом, число ступеней регулирования определяется
 .
.
5. Решаем уравнение кинематического баланса привода главного движения с помощью табличного способа. Решение представлено в табл. 3.
Решение уравнения кинематического баланса привода главного движения позволяет определить следующие значения частот вращения вала шпинделя: 193, 245, 311, 384, 489, 621, 760, 967, 1229.
6. Определяем диапазон регулирования Rn, знаменатель ряда частот вращения j, относительную потерю скорости А для привода главного движения
 ,
,
 ,
,

Табличный способ решения уравнения кинематического баланса
| |  | |  | | |
 |  |  | ||||
 | ||||||
 | ||||||
 | | |||||
| ||||||
| ||||||
 | | |||||
| ||||||
|
7. Строим график частот вращения (рис. 10). Построение графика начинаем с создания структурной сетки. Число вертикальных линий сетки равняется четырем (три вала привода плюс вал электродвигателя). Число горизонтальных линий должно равняться числу частот вращения вала шпинделя, т.е. девяти. В рассматриваемом примере частота вращения электродвигателя (1440 об/мин) больше максимального значения частоты вращения вала шпинделя (1229 об/мин). Поэтому при создании сетки дополнительно добавляем одну горизонтальную линию. Лучи проводятся в соответствие с решением уравнения кинематического баланса (табл.3).
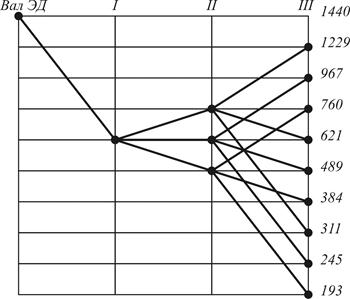
Рис. 10. График частот вращения
8. На схеме привода подачи показывается связь каждого элемента с валом (неподвижное соединение, подвижное, свободное). Условные обозначения на приводе показываются с учетом требований
табл. 2.
9. Определяем значения максимальной и минимальной подач.
Для приводов подач токарных и фрезерных станков, имеющих в качестве источника вращения отдельный электродвигатель (независимый привод подачи), значения подач определяются из выражения
 , мм/об,
, мм/об,
где, ‑ частота вращения электродвигателя привода подач, об/мин;  ‑ передаточное отношение кинематической цепи привода подач;
‑ передаточное отношение кинематической цепи привода подач;  ‑ шаг винтовой передачи, мм.
‑ шаг винтовой передачи, мм.

Для приводов станков у которых цепь движения подачи начинается с вала шпинделя значения подач определяются по формуле
 , мм/об.
, мм/об.
В данном случае в качестве источника вращения выступает вал шпинделя и в формуле указывается 1 оборот вала шпинделя.
Вопросы для самоконтроля
1. Какова система классификации металлорежущих станков?
2. Покажите условные обозначения типовых элементов кинематических схем станков.
3. Дайте определения главного движения станка и движения подачи.
4. Назовите основные типы приводов станков.
5. Что позволяет определить уравнение кинематического баланса и как оно записывается?
6. Как определить число ступеней регулирования привода станка?
7. Как определить диапазон регулирования привода, знаменатель ряда частот вращения и относительную потерю скорости?
8. Назовите последовательность построения графика частот вращения.
9. Чем вызвана необходимость изменения частоты вращения станка?
ОСНОВЫ КИНЕМАТИЧЕСКОЙ НАСТРОЙКИ СТАНКОВ
УРАВНЕНИЯ КИНЕМАТИЧЕСКОГО БАЛАНСА И ФОРМУЛЫ НАСТРОЙКИ
Кинематическая цепь, являющаяся средством согласования перемещений инструмента и заготовки для определенного формообразования обрабатываемой поверхности, составляется из различных кинематических пар. Поэтому необходимо связать начальное и конечное перемещения в данной кинематической цепи, чтобы получить заданную форму детали.
Уравнение, связывающее перемещения начального и конечного звеньев кинематической цепи, называется уравнением кинематического баланса. Из уравнения кинематического баланса находят зависимость параметра звена настройки конкретной кинематической цепи в зависимости от расчетных величин (заданных режима резания, шага нарезаемой резьбы и т.д.).
Рассмотрим составление уравнений кинематического баланса и получение из них формул настройки этих цепей. На рис. 13.1 приведена структурная кинематическая схема зубодолбежного станка. На этой схеме имеются три звена настройки — гитары и, у и х. Для того чтобы произвести кинематическую настройку станка, необходимо определить передаточные отношения iu, iy и ix.
Составим уравнение кинематического баланса цепи главного движения. Главным движением является возвратно-поступательное перемещение инструмента (долбяка). В этой цепи начальным звеном является электродвигатель, а конечным — долбяк, причем начальное звено (вал электродвигателя) вращается, а конечное звено совершает возвратно-поступательное движение. Поэтому в данной цепи имеется механизм, преобразующий вращение в возвратно-поступательное перемещение.
Пусть электродвигатель имеет на выходном валу частоту вращения пэа. Эта частота вращения будет изменяться в данной цепи кинематическими парами с постоянными передаточными отношениями (С, и С2) и в гитаре главного движения (и). Итак, если вал электродвигателя имеет частоту вращения пэа, то долбяк должен получить заданное число двойных ходов в минуту яд:

Полученное равенство и есть уравнение кинематического баланса цепи главного движения. В полученном уравнении все величины, кроме передаточного отношения звена настройки iu, известны. Чтобы долбяк совершал заданное число двойных ходов в минуту яд, необходимо настроить гитару и, т.е. найти из этого уравнения ее передаточное отношение iu. Определим это передаточное отношение из уравнения (14.1):

где С — постоянная величина, равная произведению n3Ri<i2.
Полученная зависимость (14.2) называется формулой настройки цепи главного движения. Из анализа данной формулы очевидно, что передаточное отношение звена настройки цепи главного движения зависит только от заданного числа двойных ходов в минуту инструмента; знаменатель в этой формуле будет всегда одинаковым для любых обрабатываемых зубчатых колес.
Рассмотрим, как составляется уравнение кинематического баланса цепи обката. В зубодолбежном станке долбяк, имеющий число зубьев za, и будущее зубчатое колесо с числом зубьев z3aT должны находиться в зацеплении как два зубчатых колеса с передаточным отношением zJz3aT— Поэтому если долбяк сделает один оборот, то заготовка должна выполнить гд/гзаг оборотов. Итак, начальным звеном в этой кинематической цепи обката будет долбяк, а конечным — заготовка. Теперь составим уравнение кинематического баланса:

В полученном уравнении кинематического баланса цепи обката неизвестной величиной является передаточное отношение гитары обката /х, определив которое, получим формулу настройки данной цепи

где В — постоянная величина, равная произведению /5 /6, a za и z3ar — исходные данные.
§ 2. МЕТОДИКА КИНЕМАТИЧЕСКОЙ НАЛАДКИ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ.
Кинематическая наладка станка заключается в согласовании движений исполнительных органов. Методика наладки одинакова для большинства станков и не зависит от их сложности. Для примера рассмотрим наладку токарно-винторезного станка на нарезание резьбы (рис. 1). Чтобы нарезать резьбу на заготовке 1, необходимо сообщить суппорту 3 с резцом 2 продольную подачу вдоль оси заготовки, согласованную с частотой вращения шпинделя 5. Следовательно, нужно рассчитать две кинематические цепи: скоростную (цепь главного движения) и нарезания резьбы. В обоих случаях следует составить уравнения кинематического баланса, связывающие расчетные перемещения конечных элементов кинематической цепи.
Рассмотрим кинематическую цепь главного движения. Шпиндель 5 с заготовкой 1 получает вращение от электродвигателя через ременную передачу и три пары зубчатых колес. Частоту вращения (мин -1 ) шпинделя рассчитывают по формуле n шп =1000v/(πd),
где v — скорость резания, м/мин (выбирается по справочнику режимов резания); d — диаметр заготовки, мм.
Составим уравнение кинематической цепи от электродвигателя к шпинделю при условии, что шпиндель должен вращаться с частотой

где n — частота вращения вала электродвигателя, мин -1 ; 0,985 — коэффициент, учитывающий скольжение ремня.
Это уравнение можно представить и в общем виде:
n шп =ni пост i см , откуда i см = n шп /ni пост ,
где i пост — постоянное передаточное отношение, характеризующее цепь; i см — сменное передаточное отношение механизма наладки.
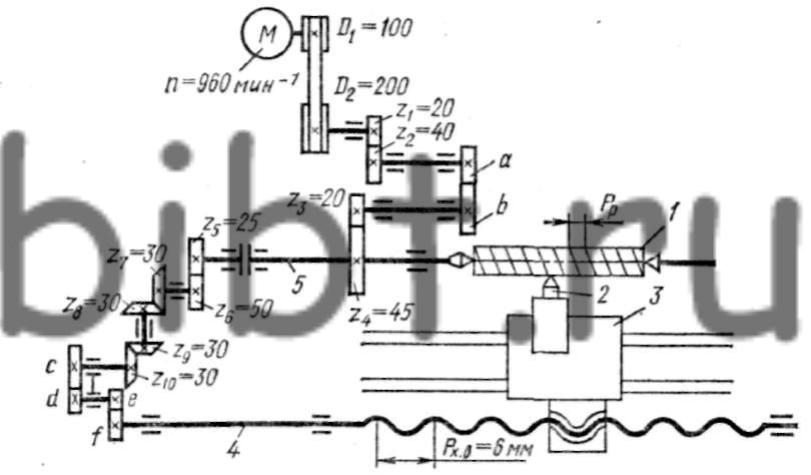
Рис. 1. Кинематическая схема токарно-винторезного станка
В рассматриваемой кинематической цепи известны все величины, за исключением сменных колес a-b, являющихся механизмом наладки. Подставив численные значения, получим

Так как n шп = 1000v/(πd), определим значение i см =a/b; определим колеса a и b и тем самым произведем наладку цепи главного движения. Затем приступим к наладке кинематической цепи движения подачи (или цепи нарезания резьбы). Резец 2, укрепленный на суппорте 3, получает перемещение от ходового винта 4, который приводится во вращение от шпинделя 5 через пару цилиндрических колес, две пары конических колес и сменные зубчатые колеса с-d, е-f (см. рис. 1).
Составим уравнение кинематического баланса исходя из условия, что за один оборот шпинделя резец переместится вдоль оси заготовки на величину шага Р р нарезаемой резьбы:

В общем виде это уравнение будет выглядеть следующим образом:

где Р р — шаг нарезаемой резьбы; Р х.в — шаг ходового винта.
В рассматриваемой цепи

Подобрав сменные колеса с-d, е-f, произведем наладку цепи движения подачи.
При кинематической наладке станков необходимо:
1) выяснить характер движения рабочих органов и их согласованность;
2) выявить все кинематические цепи станка;
3) составить уравнения кинематических цепей, связывающих попарно рабочие органы станка;
4) определить передаточные отношения механизма наладки и подобрать в соответствии с ними сменные зубчатые колеса или другие элементы наладки.
Кинематическая настройка станков
Кинематическую настройку станка производят для обеспечения необходимых перемещений конечных звеньев кинематической цепи и для получения заданных формы и размеров детали, которая в основном сводится к определению параметров органа настройки. Расчетные перемещения звеньев определяют исходя из формы поверхности, которая должна быть образована на заготовке, и вида режущего инструмента.
Затем по кинематической цепи составляют уравнение кинематического баланса, связывающее начальное и конечное перемещения, и находят зависимость параметра органа настройки от расчетных перемещений и постоянных цепи.
Кинематическая цепь
Кинематическая цепь составляется из движущихся сопряженных между собой и передающих друг другу движения деталей. Если началом кинематической цепи является электродвигатель (рис. 3,б), то можно найти связь между начальным и конечным звеньями:

где n, nшп — частота вращения начального и конечного звеньев; np, ip — КПД и передаточное отношение ременной передачи.
Для удобства вычислений рекомендуется в уравнении кинематического баланса (4.1) выделить постоянные величины структурной формулы и подсчитать их как коэффициент данной кинематической цепи, например:

Это выражение справедливо и для станков, в цепи главного движения которых в качестве органа настройки используется коробка скоростей. Тогда в выражении (4.2) iv будет передаточным отношением коробки скоростей.
Уравнение кинематического баланса
Уравнение кинематического баланса для цепи главного вращательного движения имеет вид (об/с)
nc i = nk, (4.3) , где nc и nk— частота вращения соответственно начального и конечного звена, об/с; i- передаточное отношение кинематической цепи.
Уравнение кинематического баланса для цепи, у которой начальное звено имеет вращательное движение, а конечное — прямолинейное, будет (мм/с)
nc i H = Sc, где Н — ход кинематической пары, преобразующей вращательное движение в прямолинейное, мм/об; sc — линейное перемещение конечного звена, мм/с.
Величина хода
Величина хода равна перемещению прямолинейно движущегося звена за один оборот вращающегося звена. Для винтовой пары (винт — гайка)
H = k tв (4.4), где tв — шаг ходового винта, мм; k — число заходов.
Для реечной передачи.
H = π m z, где m — модуль зацепления, мм; z — число зубьев реечного колеса.
На этом основании уравнение кинематического баланса для секундной подачи (мм/с):
для цепи с винтовой парой

для реечной передачи

Уравнение кинематического баланса для оборотной подачи (мм/об)

где s — линейное перемещение конечного звена, мм/об.
Из уравнений (4.5)-(4.7) определяют передаточное отношение органа настройки. Например, из уравнения (4.2) находят

Это выражение является формулой настройки сменных колес гитары скоростей цепи (см. рис. 3,б).
Выводы
Анализ структурных схем металлорежущих станков позволяет сделать следующие выводы. Кинематическая структура станков зависит от геометрической формы, размеров обрабатываемой поверхности и метода обработки. Чем меньше необходимое число исполнительных формообразующих движений, тем меньше кинематических цепей в структуре станка, тем проще его кинематика и конструкция. Существенное значение имеют и другие факторы, например точность и шероховатость поверхности, динамика резания, условия обслуживания станка, а также экономические факторы.