
Рассмотрим условия равновесия произвольной плоской и пространственной систем сил, включая три основные формы и частные случаи равновесия для систем параллельных и сходящихся сил:
Из основной теоремы статики следует, что любая система сил и моментов, действующих на твердое тело, может быть приведена к выбранному центру и заменена в общем случае главным вектором и главным моментом.
Если система уравновешена, то получаем условия равновесия: R=0, MO=0. Из этих условий для пространственной системы сил получается шесть уравнений равновесия, из которых могут быть определены шесть неизвестных:
- Формы условий равновесия
- Первая форма
- Вторая форма
- Третья форма
- Другие условия равновесия
- Три формы равновесия произвольной плоской системы сил.
- Условия равновесия твердого тела и системы сил
- Термины «равновесие тела» и «равновесие системы сил»
- Основная форма условий равновесия
- Вторая форма условий равновесия
- Третья форма условий равновесия
- Условия равновесия плоского тела
- Доказательство условий равновесия
- Основная форма условий равновесия
- Вторая форма условий равновесия
- Линейная зависимость моментов относительно двух точек
- Третья форма условий равновесия
Формы условий равновесия
Первая форма
Для плоской системы сил (например, в плоскости Oxy) из этих уравнений получаются только три:
причем оси и точка O, относительно которой пишется уравнение моментов, выбираются произвольно. Это первая форма уравнений равновесия.
Вторая форма
Уравнения равновесия могут быть записаны иначе:
Это вторая форма уравнений равновесия, причем ось Ox не должна быть перпендикулярна линии, проходящей через точки A и B.
Третья форма
Это третья форма уравнений равновесия, причем точки A, B и C не должны лежать на одной прямой.
Предпочтительность написания форм уравнений равновесия зависит от конкретных условий задачи и навыков решающего.
Другие условия равновесия
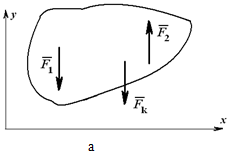
При действии на тело плоской системы параллельных сил одно из уравнений исчезает и остаются два уравнения (рисунок 1.26, а):
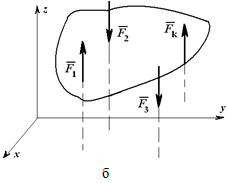
Для пространственной системы параллельных сил (рисунок 1.26, б) могут быть записаны три уравнения равновесия:
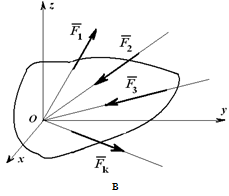
Для системы сходящихся сил (линии действия которых пересекаются в одной точке) можно написать три уравнения для пространственной системы:
и два уравнения для плоской системы:
В каждом из вышеприведенных случаев число неизвестных, находимых при решении уравнений, соответствует числу записанных уравнений равновесия.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Три формы равновесия произвольной плоской системы сил.
1. Произвольная плоская система сил находится в равновесии, если алгебраические суммы проекций всех сил на оси х и у равны нулю, а также равна нулю сумма моментов всех сил относительно любой точки.
2.Произвольная плоская система сил находится в равновесии, если алгебраические суммы проекций всех сил на одну из осей х или у равна нулю, а также, если равны нулю алгебраические суммы моментов всех сил относительно любых двух точек.
3.Произвольная плоская система сил находится в равновесии, если алгебраические суммы моментов всех сил относительно любых трех точек, не лежащих на одной прямой.
Пространственная система сил.
Пространственная система сил – это система сил, как угодно расположенных в пространстве.
Суммой трех сил, сходящихся в одной точке является сила по величине и направлению, совпадающая с диагональю параллелепипеда, построенного на заданных силах.
Момент силы относительно оси равен произведению модуля силы на кратчайшее расстояние от выбранной оси до линии действия силы.
Момент может равняться нулю, если:
1. Сила лежит на выбранной оси.
2.Сила пересекает выбранную ось.
3.Сила параллельна оси.
При приведении пространственной системы сил к точке, её можно заменять на эквивалентную систему с главным вектором и главным моментом.
Главный вектор – это геометрическая сумма всех сил системы.
Главный момент – это сумма моментов, компенсирующих пар.
Пространственная система сил находится в равновесии, если алгебраические суммы проекций всех сил на оси x, y, z равны нулю, а также равны нулю моменты всех сил относительно этих же осей.
Кинематика.
Кинематика изучает виды движения.
Плоско – параллельное движение.
Плоско – параллельное движение – это такое движение, при котором фигура полученная пересечением данного тела с выбранной плоскостью остается параллельной самой себе за все время движения.
При плоско – параллельном движении всегда существует точка, абсолютная скорость которой в данный момент времени равна нулю. Каждый последующий момент – это будет другая точка.
ДИНАМИКА.
Динамика изучает виды движения тела в зависимости от приложенных сил.
1. всякая изолированная точка находится в состоянии относительного покоя, или равномерного прямолинейного движения до тех пор, пока приложенные силы не выведут её из этого состояния.
2. Ускорение тела прямопропорциональных действующей на тело силе.
3. Если на тело действует система сил, то его ускорение будет складываться из тех ускорений, которые бы тело получало от каждой силы в отдельности.
4. Всякому действию есть есть равное по величине и противоположно направлению противодействие.
Центр тяжести – это точка приложения силы тяжести, при повороте тела центр тяжести не меняет своего положения.
Сила инерции.
Сила инерции – всегда направлена в противоположную сторону ускорению и приложена к связи.
При равномерном движении, т.е. когда а=0 сила инерции равна нулю.
При криволинейном движении раскладывается на две составляющие: на нормальную силу и на касательную.
Метод кинематики: условно прикладывают к телу силу инерции можно считать, что внешние силы реакции связей и сила инерции образуют уравновешенную систему сил. F+R+Pu=0
Сила трения.
Трение делится на два вида: трение скольжения и трение качения.
Законы трения скольжения:
1. Сила трения прямопропорциональной нормальной реакции опоры и направлена вдоль соприкасающихся поверхностей в противоположную сторону движению.
2.Коэффициент трения покоя всегда больше коэффициента трения движения.
3. Коэффициент трения скольжения зависит от материала и физически – механических свойств трущихся поверхностей.
Условие самоторможения.
Трение приводит к снижению срока службы деталей к их износу и нагреву. Для того, чтобы этого избежать необходимо вести смазку. Повысить качество обработки поверхности деталей. В трущихся местах применять другие материалы.
4. По возможности заменить трение скольжения трением качения.
Основные понятия сопротивления материалов.
Сопротивление материалов – это наука, изучающая методы расчета конструкций на прочность, жесткость и устойчивость.
Прочность – это способность конструкции выдерживать заданную нагрузку в течение срока службы без разрушения и появления остаточных деформаций.
Жесткость – это способность конструкции сохранять первоначальную форму упругого равновесия.
Устойчивость – это способность конструкции сохранять первоначальную форму упругого равновесия.
Все тела разделены на 3 группы:
1.Брус – это тело, один из размеров которого (длина) во много раз больше двух других.
2. Оболочка – это тело, один из размеров которого (толщина) во много раз больше двух других.
3. Массив – это тела, все размеры которого равны.
Классификация нагрузок:
1.По характеру действия:
2. По способу приложения:
Метод сечения.
Мысленно разрезаем нагруженный силами груз, для того, чтобы определить внутренние силовые факторы, для этого отбрасываем одну часть груза. Заменяем межмолекулярную систему сил эквивалентной системой с главным вектором и главным моментом. При разложении главного вектора и главного момента по осям x, y, z. устанавливаем вид деформации.
Внутри сечения бруса может возникать внутри силовых факторов, если возникает сила N (продольная сила), то брус растянут или сжат.
Если возникает Мк (крутящий момент) то деформация кручения, сила Q (поперечная сила) то деформация сдвига среза или изгиба. Если возникает Мих и Миz (изгибающий момент) то деформация изгиба.
Метод сечения позволяет определить напряжение в сечении груза.
Напряжение – это величина, показывающая, сколько нагрузки приходится на единицу площади сечения.
Эпюра – это график изменения продольных сил , напряжений, удлинений, крутящих моментов и т. д.
Растяжение (сжатие) – это такой вид деформации, при котором в поперечном сечении бруса возникает только продольная сила.
Правила знаков для нагрузки.
Если нагрузка направлена от сечения бруса, то продольная сила будет равна ей со знаком «плюс», если нагрузка направлена к сечению, то продольная сила будет со знаком «минус».
В пределах упругих деформаций нормальное напряжение прямо – пропорционально продольным деформациям.
Е – модуль Юнка, коэффициент, который характеризует жесткость материала при напряжениях, зависит от материала, образца из справочных таблиц.
Нормальное напряжение измеряется в Паскалях.
Расчет на прочность. Np≥[N] -Условие прочности при растяжении – сжатии.
Np – расчетный коэффициент запаса прочности.
[n] – допустимый коэффициент запаса прочности.
бmax – расчет максимального напряжения.
Кручение.
Кручение – такой вид деформации, при котором в поперечном сечении бруса возникает только один внутренний силовой фактор – крутящий момент. Кручению повергаются валы, оси. И пружины. При решении задач строятся эпюры крутящих моментов.
Правило знаков для крутящих моментов: Если вращающий момент поворачивает вал со стороны сечения по ходу часовой стрелки, то крутящий будет ему равен со знаком +, против – со знаком -.
Условия равновесия твердого тела и системы сил
Термины «равновесие тела» и «равновесие системы сил»
Здесь мы рассматриваем условия, при которых твердое тело находится в состоянии равновесия. Под этим мы подразумеваем, что если тело в некоторый момент времени покоилось, то оно будет покоится и в последующие моменты времени, относительно некоторой инерциальной системы отсчета.
Об этом также говорят как об условиях равновесия системы сил. Под системой сил в статике всегда подразумеваются силы, действующие на абсолютно твердое тело, или на систему, которую, в соответствии с принципом затвердевания, можно считать единым твердым телом. Все законы преобразования сил относятся только к силам, действующим на одно тело. Под равновесием системы сил подразумевается уравновешенная система, которую эквивалентными преобразованиями можно свести к отсутствию сил, то есть к их взаимному уничтожению. Тогда если система сил находится в равновесии, то она эквивалентна отсутствию сил. Такая система не оказывает никакого влияния на движение тела. И если оно вначале покоилось, то будет покоиться и в последующие моменты времени.
Термин равновесие системы сил несколько отличается от термина равновесие твердого тела. Различие связано с тем, что силы, действующие на тело можно разбить на несколько систем. Некоторые из этих систем могут находиться в равновесии, и не оказывать влияния на движение. Их можно исключить. В тоже время могут существовать неравновесные системы, приводящие к изменению скорости движения центра масс и момента импульса тела.
Однако, если в систему сил включены все внешние силы, то эти понятия совпадают. Далее мы будем говорить об условиях равновесия твердого тела. Эти условия есть то же самое, что условия равновесия системы сил, если под системой сил подразумевать все внешние силы, действующие на тело.
Основная форма условий равновесия
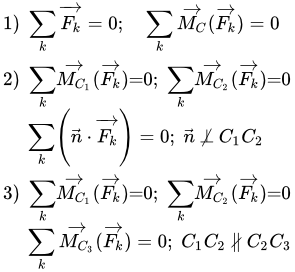
Для равновесия твердого тела необходимо и достаточно, чтобы векторная сумма внешних сил, действующих на тело равнялась нулю, и чтобы векторная сумма моментов этих сил, относительно произвольно выбранного центра C , равнялась нулю:
(1.1) ;
(1.2) .
Доказательство ⇓
Здесь внешние силы приложены к телу в точках .
Если мы выберем прямоугольную систему координат Cxyz с центром в точке C , то условия (1.1) и (1.2) можно выразить через проекции сил и моментов на оси этой системы. Тогда мы получим шесть уравнений:
; ; ;
; ; .
Из этих уравнений можно определить шесть неизвестных величин, определяющих реакции опор тела.
Также мы можем произвольным образом выбрать три вектора, не лежащие в одной плоскости, и спроектировать уравнения (1.1) и (1.2) на их направления. В результате мы также получим систему из шести уравнений.
Вторая форма условий равновесия
Условия равновесия можно записать и в других формах, которые могут оказаться более удобными при решении некоторых задач. Вот вторая форма условий равновесия.
Для равновесия твердого тела необходимо и достаточно, чтобы векторная сумма моментов внешних сил, действующих на тело, относительно произвольным образом выбранных точек и равнялась нулю, и чтобы сумма проекций сил на произвольное направление, не перпендикулярное направлению , равнялась нулю:
(2.1) ;
(2.2) ;
(2.3) .
Доказательство ⇓
Если спроектировать условия (2.1) и (2.2) на оси координат, то получим три уравнения (2.1), три уравнения (2.2) и одно уравнение (2.3). Всего получается семь уравнений. Однако, как показано ниже, между шестью уравнениями (2.1) и (2.2) существует одна линейная зависимость (см. «Линейная зависимость моментов относительно двух точек ⇓»). Таким образом, в условиях (2.1-3) имеется 7-1=6 линейно независимых уравнений, из которых можно определить шесть неизвестных величин.
Третья форма условий равновесия
И наконец, имеется третья форма условий равновесия.
Для равновесия твердого тела необходимо и достаточно, чтобы векторная сумма моментов внешних сил, действующих на тело, относительно произвольным образом выбранных точек и , не лежащих на одной прямой, равнялась нулю:
(3.1) ;
(3.2) ;
(3.3) ;
(3.4) .
Доказательство ⇓
Если спроектировать условия (3.1), (3.2) и (3.3) на оси координат, то получим три уравнения (3.1), три уравнения (3.2) и три уравнения (3.3) – всего девять уравнений. Как показано ниже, между шестью уравнениями (3.1) и (3.2) существует одна линейная зависимость (см. «Линейная зависимость моментов относительно двух точек ⇓»). Аналогичным образом, между шестью уравнениями (3.1) и (3.3) существует еще одна линейная зависимость. И наконец, между шестью уравнениями (3.2) и (3.3) существует третья линейная зависимость. То есть, в условиях (3.1-3) имеется три линейных зависимости. Тогда число линейно независимых уравнений равно 9–3=6. Также, как и в предыдущих формах, из этих уравнений можно определить шесть неизвестных величин.
Условия равновесия плоского тела
Теперь рассмотрим плоскую систему, в которой тело может совершать движение только вдоль одной плоскости. При этом силы также направлены в этой плоскости. В этом случае мы выбираем систему отсчета так, чтобы оси x и y лежали в рассматриваемой плоскости, а ось z была ей перпендикулярна. Тогда приведенные выше формы условий равновесия сохраняют свой вид. При этом z – компоненты всех сил равны нулю: , а у моментов сил отлична от нулю только z – компонента: .
Выпишем условия равновесия для плоской системы, расписав их по компонентам.
Основная форма условий равновесия
;
;
.
Вторая форма условий равновесия
;
;
.
Третья форма условий равновесия
;
;
;
.
Здесь во всех формах имеется по три уравнения, из которых можно определить три неизвестных величины.
Доказательство условий равновесия
Основная форма условий равновесия
Все формы ⇑ Для равновесия твердого тела необходимо и достаточно, чтобы векторная сумма внешних сил, действующих на тело равнялась нулю, и чтобы векторная сумма моментов этих сил, относительно произвольно выбранного центра C , равнялась нулю:
(1.1)
(1.2)
Для доказательства воспользуемся законами движения твердого тела. Они описываются уравнениями:
(1.3) ;
(1.4) .
Здесь – ускорение центра масс тела; M – его масса; – момент импульса тела относительно произвольно выбранного центра C ; – внешние силы, действующие на тело, приложенные в точках .
Пусть тело находится в состоянии покоя относительно выбранной инерциальной системы координат. Тогда, в этой системе координат, скорость всех точек равна нулю. Отсюда
, .
Подставляя в (1.3) и (1.4), получаем (1.1) и (1.2).
Необходимость доказана.
Пусть выполняются условия равновесия (1.1) и (1.2). Подставляя их в уравнения движения (1.3) и (1.4), получаем:
;
.
Отсюда получаем, что скорость движения центра масс и момент импульса постоянны, не меняются со временем. Пусть теперь в начальный момент времени тело покоилось. Тогда скорость движения его центра масс и момент импульса равны нулю. А поскольку они не меняются со временем, то они равны нулю и в последующие моменты времени. То есть тело остается в состоянии покоя во все моменты времени.
Вторая форма условий равновесия
Все формы ⇑ Для равновесия твердого тела необходимо и достаточно, чтобы векторная сумма моментов внешних сил, действующих на тело, относительно произвольным образом выбранных точек и равнялась нулю, и чтобы сумма проекций сил на произвольное направление, не перпендикулярное направлению , равнялась нулю:
(2.1)
(2.2)
(2.3)
Пусть тело находится в состоянии равновесия. Возьмем произвольные точки и и выберем произвольный вектор , не перпендикулярный прямой : . Как уже было доказано при выводе основной формы условий равновесия ⇑, выполняются условия (1.1) и(1.2):
(1.1) :
(1.2) .
Поскольку здесь C – произвольная точка, то в качестве нее возьмем точку . В результате получим (2.1):
(2.1) .
Далее, в качестве C возьмем точку . Получим (2.2):
(2.2) .
Теперь спроектируем уравнение (1.1) на направление вектора . Получим (2.3):
(2.3) .
Это уравнение выполняется для любых векторов . В том числе и для тех, направление которых не перпендикулярно : .
Необходимость доказана.
Пусть выполняются условия (2.1), (2.2) и (2.3). Докажем, что тогда тело будет находиться в состоянии равновесия. Воспользуемся векторным уравнением:
(2.4) .
Подставим его в (2.1):
.
Поскольку из (2.2), , то .
Отсюда
(2.5) ,
где λ – произвольная постоянная. Умножим это уравнение скалярно на и применим (2.3):
(2.6) .
По условию, . Поэтому .
Тогда, чтобы выполнялось (2.6) нужно положить . В результате из (2.5) получаем уравнение (1.1):
.
Условие (1.2) также выполняется, если положить . Таким образом мы получили, что если выполняются условия (2.1), (2.2) и (2.3), то выполняются условия (1.1) и (1.2):
(1.1) ;
(1.2) .
Как мы уже доказали при выводе основной формы условий равновесия ⇑, это означает, что тело находится в равновесии.
Линейная зависимость моментов относительно двух точек
Докажем, что уравнения (2.1) и (2.2) линейно зависимы. Для этого из (2.1) вычтем (2.2) и воспользуемся (2.4):
.
Здесь мы ввели обозначение . Умножим это уравнение скалярно на :
.
В правой части стоит смешанное произведение векторов, в которое входит два одинаковых вектора . Поэтому оно равно нулю. В результате получаем линейную зависимость между уравнениями (2.1) и (2.2):
.
Третья форма условий равновесия
Все формы ⇑ Для равновесия твердого тела необходимо и достаточно, чтобы векторная сумма моментов внешних сил, действующих на тело, относительно произвольным образом выбранных точек и , не лежащих на одной прямой, равнялась нулю:
(3.1) ;
(3.2) ;
(3.3) ;
(3.4) .
Пусть тело находится в состоянии равновесия. Как уже было доказано при выводе основной формы условий равновесия ⇑, при этом выполняется условие (1.2):
(1.2) .
Возьмем произвольные точки , и , не лежащие на одной прямой. Поскольку в (1.2) C – произвольная точка, то в качестве нее возьмем последовательно точки , и . В результате получим уравнения (3.1), (3.2) и (3.3):
(3.1) ;
(3.2) ;
(3.3) .
Эти уравнения выполняются для любых точек , и . В том числе и для тех, которые не лежат на одной прямой:
(3.4) .
Необходимость доказана.
Пусть выполняются условия (3.1), (3.2), (3.3) и (3.4). Докажем, что тело будет находиться в состоянии равновесия. Как и при доказательстве второй формы, воспользуемся векторным уравнением:
(3.5) .
Подставим его в (3.1):
.
Поскольку из (3.2), , то .
Отсюда
(3.6) ,
где – произвольная постоянная.
Выполняя те же действия с точками и , найдем:
(3.7) ,
где – также произвольная постоянная. Сравнивая (3.6) и (3.7) имеем:
(3.8) .
Поскольку векторы и не параллельны, то уравнение (3.8) может выполняться только при . Тогда из (3.6) следует, что .
Для доказательства того, что , достаточно умножить скалярно уравнение (3.8) на вектор, перпендикулярный и вектор, перпендикулярный .
Если обозначить точку как C , то (3.1) примет вид:
.
Итак, мы получили, что если выполняются условия (3.1), (3.2) и (3.3), то выполняются условия (1.1) и (1.2):
(1.1) ;
(1.2) .
Как мы уже доказали при выводе основной формы условий равновесия ⇑, это означает, что тело находится в равновесии.
Автор: Олег Одинцов . Опубликовано: 30-09-2019