Токарный станок модели 16К20 является типичным и наиболее распространенным представителем класса токарно-винторезных станков.
Станки этого класса — универсальные станки токарной группы и предназначены для обработки деталей типа дисков, валов, втулок и обеспечивают обработку точением внутренних и наружных цилиндрических, конических, торцевых, фасонных поверхностей, прорезку канавок и отрезку, сверление, зенкерование и развертывание отверстий, нарезание различных типов наружных и внутренних резьб резцами, метчиками и плашками, а также накатывание рифленых поверхностей, выглаживание и раскатку поверхностей. Станки такого типа применяются в основном в единичном и мелкосерийном, а также в ремонтном производстве.
Характерными размерами станков токарной группы являются наибольший диаметр обработки над станиной (характеризует наибольший диаметр заготовки обрабатываемой на станке) и расстояние между центрами характеризует наибольшую длину обрабатываемой заготовки).
Кинематическая схема токарного станка 16к20

Уравнения кинематических цепей от шпинделя к ходовому винту при нарезании резьбы составляют из условия, чтобы за один оборот шпинделя суппорт с резцом переместился вдоль оси заготовки на шаг Р нарезаемой резьбы (при однозаходной резьбе).
Резьбу с большим шагом нарезают, используя звено увеличения шага, т.е. передача движения от шпинделя в этом случае осуществляется не через зубчатые колеса, а через звено увеличения шага в коробке скоростей. На шпиндельной бабке станка помещена таблица частот вращения шпинделя, подач и шагов нарезаемых резьб. Устанавливая рукоятки в соответствующие положения, получают различные частоты вращения шпинделя. В таблице 1 указаны, какие подачи и шаги резьб целесообразно выполнять при соответствующих частотах вращения шпинделя. Рукоятка служит для установки подачи и шага резьбы и отключения механизма коробки подач при нарезании резьб повышенной точности. Она может занимать четыре фиксированных положения, обозначенных буквами А, В, С и D и два промежуточных, обозначенных стрелками, при повороте в вертикальной плоскости. Четыре фиксированных положения I, II, III и IV может занимать рукоятка 4, служащая также для установки подачи и шага резьбы. Комбинируя положения рукояток 2 и 4, можно получить все значения подач и шагов резьбы.
Табличные значения подач могут быть получены только при установке сменных зубчатых колес
Установкой на станке сменных зубчатых колес
создается возможность нарезания метрических и дюймовых резьб с шагами, равными удвоенным значениям, указанным в таблице 1. Эти же сменные зубчатые колеса используют для получения удвоенных величин подач по сравнению с табличными значениями.
При дополнительных сменных колесах и сменных колесах основного набора на станке, используя механизм коробки подач, можно нарезать резьбы, шаги которых приведены в другой таблице, помещенной на внутренней стенке дверцы кожуха сменных зубчатых колес. Сменные зубчатые колеса для нарезания через механизм коробки подач для нарезания не приведенных в таблицах метрических и дюймовых резьб подбирают по формуле
Таблица 1 — частоты вращения, подачи и шаги нарезаемых резьб
- Составление уравнения кинематического баланса привода главного движения в развернутом виде
- Уравнение кинематического баланса привода
- Курсач. Кинематический расчёт привода
- Составление уравнений кинематического баланса
- Пример выполнения работы
- Кинематическая цепь подач станка мод. 16К20 для нарезания метрической резьбы. Готовое решение: Заказ №7308
- Описание и исходные данные задания, 50% решения + фотография:
- Вопрос 7.
- Кинематическая цепь подач станка мод. 16К20 для нарезания метрической резьбы. Составить уравнение кинематического баланса и подсчитать максимальное и минимальное значения шагов, нарезаемых резьб.
Составление уравнения кинематического баланса привода главного движения в развернутом виде
Уравнение кинематического баланса привода
Числа зубьев шестерен.
Группы передач.
Иллюстрация схемы.
Кинематическая схема привода.
Иллюстрация кинематической схемы исследуемого узла приведена на рис.1.
Исследуемый узел включает в себя валы : I, II, III, IV, V, VI, VII, VIII, IX, X, XI, XII, XIII;
В приводе имеются следующие группы передач:
a – расположена между валами II и III, включает в себя два поочередно вводимых в зацепление блока (z3, z5) и (z7, z9) на четыре скорости.
b — расположена между валами III и IV, на две скорости.
c — расположена между валами V и VI, на две скорости.
Обозначим число скоростей в группе a – Pa = 4; b – Pb = 2; c – Pc = 2.
Согласно паспортных данных [1] исследуемого станка запишем числа зубьев, шаги и пр. параметры каждого элемента кинематической цепи привода [табл.1].
| z1 = 38 | z10 = 33 | z19 = 28 | z28 = 22 |
| z2 = 57 | z11 = 24 | z20 = 43 | z29 = 44 |
| z3 = 22 | z12 = 48 | z21 = 54 | z30 = 22 |
| z4 = 44 | z13 = 32 | z22 = 32 | K1 = 2 |
| z5 = 26 | z14 = 25 | z23 = 36 | K2 = 1 |
| z6 = 40 | z15 = 50 | z24 = 18 | t1 = p × 8 |
| z7 = 29 | z16 = 20 | z25 = 36 | |
| z8 = 37 | z17 = 64 | z26 = 30 | |
| z9 = 33 | z18 = 56 | z27 = 30 |
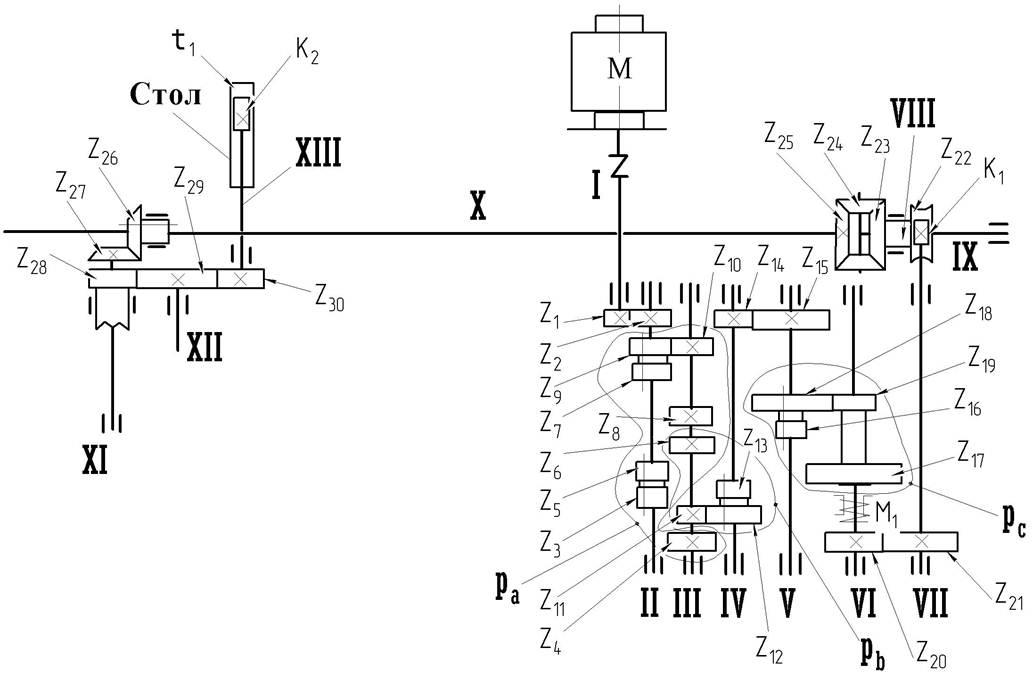
Рис.1 Кинематическая схема



Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Курсач. Кинематический расчёт привода
| Название | Кинематический расчёт привода |
| Дата | 26.07.2021 |
| Размер | 269.92 Kb. |
| Формат файла |  |
| Имя файла | Курсач.docx |
| Тип | Документы #225410 |
| страница | 3 из 8 |
 С этим файлом связано 4 файл(ов). Среди них: lab5OTC.doc, task_283704 сопромт.docx, task_289566.pdf, KOMPAS — АД.cdw.pdf. Показать все связанные файлы Подборка по базе: Практическа работа Оценка и расчет искусственного освещения прои, Готовая курсовая 1 курс Электрооборудование главного привода маг, Теплотехнический расчет.Вариант6.г.Ачинск.МуравскаяВ.СУЗ20П1.pdf, ацетальдегид расчет.docx, Оценка уровней шума в помещениях Расчет средств защиты от шума.d, 83959 Методика расчета изменения экономических показателей при о, Краснова расчет освещения.docx, Мой курсач.doc, 3.1 Расчет затрат на проведение отдельных видов работ.docx, Вайнер А.Я. Тактические расчеты (1982) (2).djvu С этим файлом связано 4 файл(ов). Среди них: lab5OTC.doc, task_283704 сопромт.docx, task_289566.pdf, KOMPAS — АД.cdw.pdf. Показать все связанные файлы Подборка по базе: Практическа работа Оценка и расчет искусственного освещения прои, Готовая курсовая 1 курс Электрооборудование главного привода маг, Теплотехнический расчет.Вариант6.г.Ачинск.МуравскаяВ.СУЗ20П1.pdf, ацетальдегид расчет.docx, Оценка уровней шума в помещениях Расчет средств защиты от шума.d, 83959 Методика расчета изменения экономических показателей при о, Краснова расчет освещения.docx, Мой курсач.doc, 3.1 Расчет затрат на проведение отдельных видов работ.docx, Вайнер А.Я. Тактические расчеты (1982) (2).djvu |
Составление уравнений кинематического баланса
Уравнения кинематического баланса представляют собой выражения, связывающие частоты вращения приводящего вала двигателя и приводимого шпинделя кинематическими передачами.
Допустимая погрешность частот вращения шпинделя зависит от знаменателя геометрического ряда.

[Δn] – допустимая погрешность частот вращения шпинделя.
 .
.

Δn – погрешность частот вращения шпинделя.

i – передаточное отношение ремённой передачи.
Пример выполнения работы




![]()
![]()
1. В качестве примера использован привод главного движения станка представленный на рис. 9. Источником движения в данном приводе является электродвигатель с частотой вращения n =1440 об/мин. Вращение с вала электродвигателя на вал I привода осуществляется с помощью ременной передачи с диаметрами шкивов 140 мм (ведущий шкив) и 320 мм (ведомый шкив). На валу I находится блок из трех зубчатых колес с числом зубьев 42, 47, 37. С помощью этого блока зубчатых колес вращение передается на зубчатые колеса 42, 37, 47, находящиеся на валу II. Передача вращения с вала II на вал III также производится с помощью блока 27, 58, 42 и зубчатых колес 68, 37, 53.
2. На кинематической схеме привода показывается связь элементов с валами.
При обозначении связей элементов с валами учитываются следующие положения:
― все показанные на схеме элементы должны быть задействованы в работе;
― сумма зубьев вступающих в работу элементов двух соседних валов должна быть одинаковой (для зубчатых пар колес с одинаковым модулем);
― должна быть исключена возможность одновременной передачи двумя способами между соседними валами.
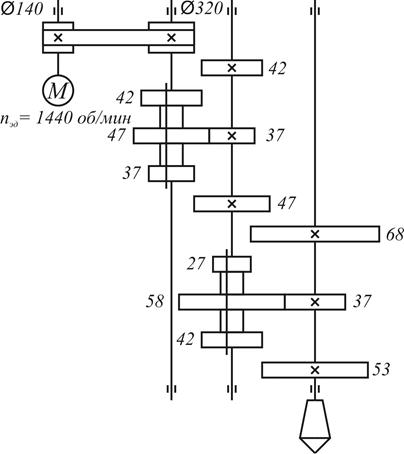
Рис. 9. Кинематическая схема привода главного движения станка
3. Составляем уравнение кинематического баланса привода главного движения в развернутом виде

 ,
,
где  ‑ частота вращения на шпинделе,
‑ частота вращения на шпинделе,  ‑ частота вращения электродвигателя, nЭД =1440 об/мин,
‑ частота вращения электродвигателя, nЭД =1440 об/мин,  ‑ передаточное отношение ременной передачи,
‑ передаточное отношение ременной передачи,  ,
,  — передаточное отношение с I вала на II вал,
— передаточное отношение с I вала на II вал,  ,
,  — передаточное отношение с II вала на III вал,
— передаточное отношение с II вала на III вал,  .
.
4. Определяем число ступеней регулирования m привода главного движения. Число ступеней регулирования определяется произведением числа групп передач. На данной схеме передача вращения реализуется следующим образом:
― передача с вала электродвигателя на первый вал привода осуществляется одним способом – с помощью ременной передачи;
― передача с первого вала на второй может быть осуществлена тремя способами – с помощью подвижного блока зубчатых колес с числами зубьев 42, 47, 37;
― передача со второго вала на третий может быть осуществлена тремя способами – с помощью подвижного блока зубчатых колес с числами зубьев 27, 58, 42.
Таким образом, число ступеней регулирования определяется
 .
.
5. Решаем уравнение кинематического баланса привода главного движения с помощью табличного способа. Решение представлено в табл. 3.
Решение уравнения кинематического баланса привода главного движения позволяет определить следующие значения частот вращения вала шпинделя: 193, 245, 311, 384, 489, 621, 760, 967, 1229.
6. Определяем диапазон регулирования Rn, знаменатель ряда частот вращения j, относительную потерю скорости А для привода главного движения
 ,
,
 ,
,

Табличный способ решения уравнения кинематического баланса
| |  | |  | | |
 |  |  | ||||
 | ||||||
 | ||||||
 | | |||||
| ||||||
| ||||||
 | | |||||
| ||||||
|
7. Строим график частот вращения (рис. 10). Построение графика начинаем с создания структурной сетки. Число вертикальных линий сетки равняется четырем (три вала привода плюс вал электродвигателя). Число горизонтальных линий должно равняться числу частот вращения вала шпинделя, т.е. девяти. В рассматриваемом примере частота вращения электродвигателя (1440 об/мин) больше максимального значения частоты вращения вала шпинделя (1229 об/мин). Поэтому при создании сетки дополнительно добавляем одну горизонтальную линию. Лучи проводятся в соответствие с решением уравнения кинематического баланса (табл.3).
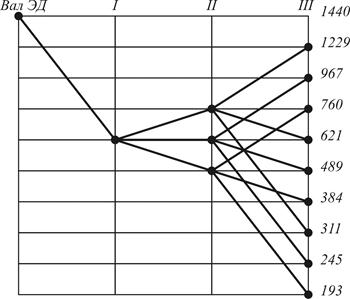
Рис. 10. График частот вращения
8. На схеме привода подачи показывается связь каждого элемента с валом (неподвижное соединение, подвижное, свободное). Условные обозначения на приводе показываются с учетом требований
табл. 2.
9. Определяем значения максимальной и минимальной подач.
Для приводов подач токарных и фрезерных станков, имеющих в качестве источника вращения отдельный электродвигатель (независимый привод подачи), значения подач определяются из выражения
 , мм/об,
, мм/об,
где, ‑ частота вращения электродвигателя привода подач, об/мин;  ‑ передаточное отношение кинематической цепи привода подач;
‑ передаточное отношение кинематической цепи привода подач;  ‑ шаг винтовой передачи, мм.
‑ шаг винтовой передачи, мм.

Для приводов станков у которых цепь движения подачи начинается с вала шпинделя значения подач определяются по формуле
 , мм/об.
, мм/об.
В данном случае в качестве источника вращения выступает вал шпинделя и в формуле указывается 1 оборот вала шпинделя.
Вопросы для самоконтроля
1. Какова система классификации металлорежущих станков?
2. Покажите условные обозначения типовых элементов кинематических схем станков.
3. Дайте определения главного движения станка и движения подачи.
4. Назовите основные типы приводов станков.
5. Что позволяет определить уравнение кинематического баланса и как оно записывается?
6. Как определить число ступеней регулирования привода станка?
7. Как определить диапазон регулирования привода, знаменатель ряда частот вращения и относительную потерю скорости?
8. Назовите последовательность построения графика частот вращения.
9. Чем вызвана необходимость изменения частоты вращения станка?
Кинематическая цепь подач станка мод. 16К20 для нарезания метрической резьбы. Готовое решение: Заказ №7308
 Готовое решение: Заказ №7308
Готовое решение: Заказ №7308
 Тип работы: Контрольная
Тип работы: Контрольная
 Статус: Выполнен (Зачтена преподавателем ВУЗа)
Статус: Выполнен (Зачтена преподавателем ВУЗа)
 Предмет: Материаловедение
Предмет: Материаловедение
 Дата выполнения: 09.08.2020
Дата выполнения: 09.08.2020
 Цена: 118 руб.
Цена: 118 руб.
Чтобы получить решение , напишите мне в WhatsApp , оплатите, и я Вам вышлю файлы.
Кстати, если эта работа не по вашей теме или не по вашим данным , не расстраивайтесь, напишите мне в WhatsApp и закажите у меня новую работу , я смогу выполнить её в срок 1-3 дня!
Описание и исходные данные задания, 50% решения + фотография:
Вопрос 7.
Кинематическая цепь подач станка мод. 16К20 для нарезания метрической резьбы. Составить уравнение кинематического баланса и подсчитать максимальное и минимальное значения шагов, нарезаемых резьб.
Станок 16К20 предназначен для выполнения различных токарных работ, а также для нарезания резьб: метрических, дюймовых, модульных, питчевых и специальных. На рисунке 6 представим кинематическую схему станка.

Рисунок 6. Кинематическая схема станка 16К20
Винторезная цепь (цепь продольной подачи) согласует вращательное движение заготовки и поступательное перемещение резьбового резца вдоль оси заготовки так, чтобы за один оборот заготовки резец переместился на шаг (если резьба однозаходная) или на ход (если резьба многозаходная). Начальным звеном этой цепи является шпиндель станка, далее движение идет через коробку подач. Конечным звеном является ходовой винт станка с шагом Pх = 12 мм (рис. 6). Настройку на шаг нарезаемой резьбы проводят с помощью гитары сменных зубчатых колес (K, L, M, N) и коробки подач.

Я и моя команда оказывает помощь в учёбе по любым предметам и заданиям любой сложности.
Решение задач является неотъемлемой частью обучения в любом учебном заведении, и я смогу помочь в решение задач по любым предметам.
Присылайте задания в любое время дня и ночи в ➔ 
Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.