Основная система метода перемещений образуется путем введения во все жесткие узлы защемлений (заделок), препятствующих только поворотам узлов и опорных стержней, препятствующих линейным перемещениям узлов.
Основная система метода перемещений является кинематически определимой и состоит из отдельных статически неопределимых стержней. В отличие от основной системы метода сил основная система метода перемещений является единственно возможной.
Во введенных связях основной системы при нагружении появляются реакции, которые в заданной системе отсутствуют. Приравняв нулю эти реакции, можно составить алгебраические уравнения относительно неизвестных метода перемещений. Эти уравнения представляют собой статические уравнения равновесия узлов системы и ее отдельных частей.
Рассмотрим, например, два раза кинематически неопределимую раму (рис. 10.38, а). Основная система образуется путем введения заделки в жесткий узел В и горизонтального опорного стержня в шарнирном узле С (рис. 10.38, б).

Обозначим неизвестные перемещения узлов Z, = срд и Z2 = = Дс. Приравняем нулю реактивный момент в заделке и горизонтальную опорную реакцию в опорном стержне, которые обозначим и R2. Используя принцип независимости действия сил, запишем:

Здесь Rn, Ru и RiP — соответственно реактивные моменты в заделке от ее поворота на угол Z, = cpfi, от горизонтального смещения узла С на величину Z2 = Дс и от действия заданной нагрузки. Величины /?91, /?„ и R2P представляют собой опорные реакции во введенном горизонтальном стержне от аналогичных воздействий.
Реакции во введенных связях от кинематических воздействий Z, и Z2 представим в следующем виде:

Величины ги, г12, г21 и г22 представляют собой реакции во введенных связях от поворота жесткого узла В на единичный угол Zj = 1 и единичного линейного перемещения узла С Z2 = 1.
Таким образом, уравнения равновесия можно представить в форме канонических уравнений метода перемещений относительно неизвестных Z, и Z2:

Обобщая рассмотренную форму записи, можно составить п канонических уравнений метода перемещений для п раз кинематически неопределимой стержневой системы:

Каждое из уравнений системы (10.17) характеризует равенство нулю реакций во введенных связях основной системы.
Величины rjk называются коэффициентами канонических уравнений, a RiP — свободными или грузовыми членами. Коэффициенты гп называются главными коэффициентами и в соответствии с физическим смыслом всегда являются положительными. Побочные коэффициенты rik (/ ф к), а также свободные члены могут быть положительными, отрицательными и равными нулю. Для побочных коэффициентов на основании теоремы Рэлея о взаимности реакций имеем равенство

Доказательство теоремы Рэлея производится с помощью теоремы Бетти о взаимности работ. Смысл теоремы Рэлея виден из рис. 10.39. Реакция на второй шарнирной опоре в первом единичном состоянии равна реакции на первой шарнирной опоре во втором единичном состоянии.

Реакции во введенных связях считаются положительными, если их направления совпадают с направлениями искомых перемещений Z), принятыми в основной системе.
- Идея метода перемещений. Система канонических уравнений и общая последовательность расчета
- Расчёт статически неопределимых систем методом перемещений
- Страницы работы
- Фрагмент текста работы
- 1. Основные теоретические положения
- 1.1. Степень кинематической неопределимости сооружения
- 1.2. Основная система метода перемещений
- 1.3. Система канонических уравнений метода перемещений
- 1.4. Стандартные задачи метода перемещений в расчётах на прочность
- 1.5. Определение коэффициентов при неизвестных и свободных членов системы канонических уравнений
- 1.6. Определение внутренних усилий в заданном сооружении. Промежуточные и окончательные проверки правильности решения
- 1.7. Расчет статически неопределимых систем методом перемещений в матричной форме
- 2. Содержание расчетного индивидуального задания и исходные данные
- 3. Пример выполнения индивидуального задания
- 3.1. Исходные данные
- 3.2. Вычисление погонных жесткостей стержней рамы
- 3.3. Вычисление степени кинематической неопределимости и выбор основной системы метода перемещений
- 3.4. Построение деформационных схем и соответствующих им эпюр изгибающих моментов в единичных состояниях основной системы метода перемещений
- 3.5. Построение эпюр изгибающих моментов в ОСМП от внешних воздействий
- 3.6. Вычисление коэффициентов системы канонических уравнений метода перемещений
- 3.7. Проверка правильности вычисления коэффициентов системы канонических уравнений метода перемещений
- 3.8. Составление матриц для расчета рамы
- 3.9. Исходные данные для расчета рамы по программе «METDEF»
- 3.10. Результаты расчета по программе «METDEF»
- 3.11. Построение эпюр внутренних усилий в заданной раме
Идея метода перемещений. Система канонических уравнений и общая последовательность расчета
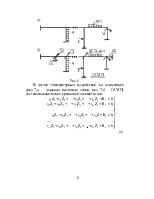
Для описания идеи метода рассмотрим простейшую расчетную схему — двухпролетную одноэтажную несвободную раму, т.е. раму, не имеющую линейных смещений узлов (рис. 14.4, а). Рама загружена произвольной нагрузкой и является дважды кинематически неопределимой.

Предположим, что узлы А и В при деформации рамы под нагрузкой будут поворачиваться на какие-то углы Zx и Z2. Введем дополнительные угловые связи в узлы Ап В (рис. 14.4, б). Полученная схема является кинематически определимой и называется основной системой метода перемещений.
Для полученной основной системы воспользуемся принципом независимости действия сил и рассмотрим следующие воздействия: от принудительного поворота первой связи на угол Zt — состояние 1 (рис. 14.4, в); от принудительного поворота второй связи на угол Z2 — состояние 2 (рис. 14.4, г) и от действия внешней нагрузки — грузовое состояние (рис. 14.4, д).
Во всех перечисленных состояниях в связях, введенных в узлы А и В, появятся реакции, которые будем считать положительными, если их направление совпадает с направлением принудительного смещения связи. Сумма реакций по каждому из указанных направлений даст полные реакции во введенных дополнительных связях:

Чтобы основная система соответствовала по своим статическим свойствам заданной расчетной схеме, очевидно, необходимо выполнение условий Ra = 0; RB = 0, или

Для выражения реакций, входящих в формулы (14.3), воспользуемся зависимостью (12.20): Rn = rltZt; Rv2 = r12Z2; R2 <= r21Zt; &22 = r n^2• Подставив эти выражения в (14.3), получим

Запись (14.4) называется системой канонических уравнений метода перемещений.
Как и уравнения (14.3), система канонических уравнений метода перемещений имеет следующий статический смысл: сумма реакций в дополнительных связях от смещения этих связей и внешнего воздействия равна нулю.
Приведенный вывод системы канонических уравнений справедлив для любой расчетной схемы с любой степенью кинематической неопределимости. Поэтому если степень кинематической неопределимости пк = п, то система канонических уравнений будет иметь вид

В системе канонических уравнений (14.5) коэффициенты при неизвестных с одинаковыми индексами называются главными коэффициентами, они всегда положительны (ги > 0). Остальные коэффициенты называются побочными, и для них выполняется теорема о взаимности возможных реакций (rik = rki).
Размерности коэффициентов при неизвестных и свободных членах системы канонических уравнений легко определяются на основании их статического смысла, сформулированного выше.
Так, для рамы, использованной при выводе системы канонических уравнений (см. рис. 14.4, а), неизвестными метода перемещений являются углы поворота (единица измерения — радиан, рад), реакциями в угловых связях (защемлениях) по направлению углов будут пары сил (единица измерения — килоньютон-метр, кН м). Следовательно, свободные члены системы уравнений, являющиеся реакциями от действующей нагрузки, будут измеряться в кН м, а все коэффициенты при неизвестных — в кН-м/рад.
Если основная система метода перемещений получена введением как угловых, гак и линейных дополнительных связей (рис. 14.5), то, рассуждая аналогично, получим нижеследующее.
В направлении первого неизвестного отрицается сумма реакций в угловой связи, которые имеют единицы измерения в кН м. Так как Z< измеряется в рад, a Z2 — в м, то единицами измерения коэффициентов при неизвестных первого уравнения будут: для г<< — кН м/рад, для г12 — кН, а для свободного члена RXF — кНм.

Аналогично, второе уравнение отрицает в направлении второго неизвестного сумму реакций, измеряемых в кН. Значит, для второго уравнения единицами измерения коэффициентов при неизвестных будут: для г21 — кН/рад, для г22 — кН/м, а для R2F — кН.
Коэффициенты при неизвестных и свободные члены системы канонических уравнений метода перемещений при расчете ортогональных рам определяются:
- — реакции в угловых связях — из условия равновесия узла, в который введена дополнительная связь;
- — реакции в линейных связях — способом сечений, которые проводятся параллельно оси связи через все стержни схемы, которые деформируются при принудительном смещении этой связи.
Последовательность расчета методом перемещений от действия внешней нагрузки.

- 1. Определение степени кинематической неопределимости расчетной схемы
- 2. Составление системы канонических уравнений в общем виде.
- 3. Получение основной системы метода перемещений путем введения дополнительных связей по направлению возможных смещений узлов расчетной схемы.
- 4. Получение деформированных схем и определение усилий в основной системе (построение эпюр Mf) от последовательного принудительного смещения дополнительных связей (/ = 1. п = пк) по нрил. 10.
- 5. Определение усилий в основной системе (построение эпюры MF) с использованием таблицы реакций прил. 11.
- 6. Определение коэффициентов при неизвестных rik и свободных членов RlF системы канонических уравнений.
- 7. Запись системы канонических уравнений метода перемещений в численном виде и определение неизвестных Zi из ее решения.
- 8. Определение усилий в заданной расчетной схеме на основании принципа независимости действия сил
- 9. Первая статическая проверка расчета. Целью ее является проверка равновесия жестких узлов расчетной схемы по значениям изгибающих моментов, полученных по эпюре MF (14.6). При правильном расчете для каждого жесткого узла должно выполняться условие ХМузл = 0.

10. Деформационная проверка расчета. Для ее проведения выбирается любая основная статически определимая система, в которой от последовательного приложения единичных сил строятся эпюры Mf (при i = 1 -s- п = = пс) и их сумма Mf. При правильном расчете должны выполняться условия

11. Построение эпюры поперечных сил QF на основании дифференциальной зависимости Q = ^^- с использованием формул (13.11) и (13.12).
- 12. Определение продольных сил в стержнях расчетной схемы из условия равновесия ее узлов и построение эпюры NF.
- 13. Статические проверки расчета. При правильном расчете любая отсеченная часть расчетной схемы или вся схема, отсеченная от опор, под действием внутренних и внешних сил должна находиться в равновесии.
Как видно из вышеприведенного, п. 10—13 настоящей последовательности ничем не отличаются от п. 11 — 14 табл. 13.11 при расчете методом сил, т.е. независимо от метода расчета указанные пункты выполняются одинаково.
Рассмотрим несколько примеров расчета рам методом перемещений.
Требуется построить эпюры усилий в раме, изображенной на рис. 14.6, а. Относительные жесткости стержней рамы, приведенные к единому множителю:
Решение. 1. Рама имеет один жесткий узел, и два се узла могут совместно перемещаться по горизонтали. Следовательно, степень кинематической неопределимости рамы пк = Пу + ял = 1 + 1 = 2.
2. Система канонических уравнений на основании (14.5) при пк = 2 будет иметь вид

- 3. Основную систему получим введением одной угловой и одной линейной дополнительных связей (рис. 14.6, б).
- 4. Последовательно зададим введенным дополнительным связям принудительные единичные смещения и покажем деформированные схемы основной системы, полученные в результате этих смещений (рис. 14.6, в и г). По деформированной схеме от угла поворота (см. рис. 14.6. в), используя схемы 1 (для ригеля) и 4 (для левой стойки) прил. 10, построим в основной системе эпюру . По деформированной схеме от линейного смещения (см. рис. 14.6. г), используя схемы 2 (для правой стойки) и 3 (для левой стойки) прил. 10, построим в основной системе эпюру М$.

- 5. Приложив к стержням основной системы заданную нагрузку, на основании схем 2 (для ригеля рамы) и 1 (для левой стойки) прил. 11 построим эпюру (рис. 14.6, 3).
- 6. Определим реакции в дополнительных связях в следующей последовательности. Сначала определим реакции первого канонического уравнения, описывающего
статическое условие равенства нулю суммы реакций в угловой дополнительной связи.
Для этого вырежем узел вместе со связью (рис. 14.7, а), последовательно прикладывая к нему изгибающие моменты с эпюр М< и Л/?, соответствующих трем расчетным состояниям. Из условия равновесия получим: ги = 9i кНм/рад, /*12 = — 9/ / 4 кН, RF = -72 кНм.

Чтобы определить реакции второго канонического уравнения, описывающего статическое условие равенства нулю суммы реакций в линейной связи, для каждого из расчетных состояний рассмотрим отсеченную часть основной системы (сечения I—I, II—II и F— F, рис. 14.7, 6) и из условия их равновесия получим: r 2i = _ 9/ / 4 кН/рад, /’22= 21/ / 16 кН/м, R2F = 15 кН.
Примечание. Так как реакции в угловых связях определяются проще, для определения числового значения реакции г21 удобнее воспользоваться теоремой о взаимности возможных реакций, т.е. г2Х = г12.
7. Система канонических уравнений в числовом виде будет иметь вид

8. Построим эпюру изгибающих моментов в заданной схеме на основании (14.6):

Усилия от действительных смещений по направлению дополнительных связей приведены на рис. 14.8, а, а результат расчета (эпюры MF, QF и NF) — на рис. 14.8, 6.
- 9. Проверка равновесия жесткого узла по полученной эпюре MF в дайной задаче может быть сделана визуально, так как в узле сходятся всего два стержня.
- К). Для проведения деформационной проверки определяем степень статической неопределимости рамы. При К =1, Ш = 1 ис = 3 • 1 — 1 = 2. Статически определимая основная система для рамы показана на рис. 14.9, а. В приведенной основной системе построим вспомогательную эпюру М® от действия сразу двух единичных моментов, приложенных по направлениям удаленных связей. Тогда

следовательно, деформационная проверка выполняется.

- 11. Эпюры Qf и Nf, строим по методике, приведенной в п. 11 и 12 табл. 13.1 и примера 13.2 (см. рис. 14.8, б).
- 12. Выполним статические проверки расчета, рассмотрев равновесие всей рамы и предварительно определив но построенным эпюрам все опорные реакции (рис. 14.9, б).
Zx=0, 15,75 + 32,25 -48 = 0;
Хг=0, 41,625 + 30,375 — 9-8 = 0;
1мл = 0, 18 + 9 • 8 • 4 — 48 ? 2 + 33 — 30,375 • 8 = 339 — 339 = 0.
Таким образом, статические проверки также выполняются, следовательно, расчет произведен правильно.
Требуется построить эпюру изгибающих моментов Мг в раме, изображенной на рис. 14.10, а.
Относительные жесткости стержней рамы одинаковы, гак как 1,25EI/ 5 = EI / 4 =

Решение. 1. Степень кинематической неопределимости рамы в силу линейной неподвижности ее узлов пк = пу= 1. Следовательно, каноническое уравнение метода перемещений будет единственным:

- 2. Основную систему получим введением одной дополнительной угловой связи (рис. 14.10, б).
- 3. Деформированную схему основной системы от принудительного поворота дополнительной связи на угол, равный единице, и соответствующую ей эпюру Mj° (рис. 14.10, в), строим по схемам 1 (для наклонной стойки) и 4 (для ригеля) прил. 10 .
- 4. Так как внешняя нагрузка является узловой и непосредственно воспринимается введенной дополнительной угловой связью (рис. 14.10, г), стержни основной системы не загружены, и, следовательно, в грузовом состоянии эпюра = 0.
- 5. Реакции в дополнительной связи в обоих расчетных состояниях определим из условий равновесия (рис. 14.10, д):
г= 7/ кН м/рад, R/: = 56 кН м.
6. Запишем каноническое уравнение в численном виде: 7iZ< + 56 = 0, откуда
Z, = -56 / И = — 8 / i рад.
7. Эпюру изгибающих моментов в заданной схеме рамы строим по формуле (14.6) при =0, т.е. MF = MfZj (рис. 14.10, е).
Требуется построить эпюру изгибающих моментов MF в раме, изображенной на рис. 14.11, а. Относительные жесткости стержней рамы:
Ригель рамы имеет бесконечную жесткость при изгибе, поэтому узлы рамы не способны к повороту.
Решение. 1. Степень кинематической неопределимости рамы пк = пл= 1, так как узлы рамы поворачиваться не могут, а для ригеля за счет изгиба стоек рамы возможно одно горизонтальное линейное смещение. Следовательно, каноническое уравнение метода перемещений будет единственным:

- 2. Основную систему получим введением одной дополнительной линейной связи (рис. 14.11, б).
- 3. Деформированную схему основной системы от принудительного смещения дополнительной связи на величину, равную единице, и соответствующую ей эпюру М,° (рис. 14.11, в) построим по схемам 2 и 3 прил. 10.
- 4. Так как внешняя нагрузка является узловой и непосредственно воспринимается введенной дополнительной линейной связью, стержни основной системы не загружены, и, следовательно, в грузовом состоянии эпюра =0.
- 5. Реакции в дополнительной связи в обоих расчетных состояниях определим из условий равновесия вырезанного замкнутыми сечениями ригеля (рис. 14.11, д)

Запишем каноническое уравнение в численном виде: 2,625iZj — 63 = 0, откуда

7. Эпюру изгибающих моментов в заданной схеме рамы строим но формуле (14.6) при Mf = 0, г.е. MF = MfZj (рис. 14.11, е). При этом эпюру изгибающих моментов на абсолютно жестком ригеле достраиваем по значениям в крайних сечениях, определенным из условий равновесия узлов.
Расчёт статически неопределимых систем методом перемещений
Страницы работы




Фрагмент текста работы
федеральное агентство по ОБРАЗОВАНИю РОССИЙСКОЙ ФЕДЕРАЦИИ
новосибирский государственный архитектурно-строительный университет (Сибстрин)
Кафедра строительной механики
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ
по выполнению индивидуального расчетного задания
по курсу «Строительная механика»
для студентов специальности 270102
«Промышленное и гражданское строительство»
Методические указания разработаны канд. техн. наук, профессором А.А. Крамаренко, ассистентом Н.Н. Сивковой
Методические указания к индивидуальному расчетному заданию «Расчет статически неопределимых систем методом перемещений» содержат необходимые теоретические положения, исходные данные и варианты индивидуального задания, пример его выполнения с использованием ЭВМ и контрольные вопросы.
Методические указания разработаны в соответствии с требованиями Государственного образовательного стандарта высшего профессионального образования к обязательному минимуму содержания и уровню подготовки инженеров по специальности 270102 «Промышленное и гражданское строительство» направления 270100 «Строительство».
Утверждены методической комиссией
факультета первой ступени высшего образования
22 мая 2008 года
— В.А. Беккер, канд. техн. наук, профессор кафедры железобетонных конструкций НГАСУ (Сибстрин);
— В.К. Фёдоров, канд. техн. наук, профессор кафедры инженерной геологии, оснований и фундаментов НГАСУ (Сибстрин)
Ó Новосибирский государственный архитектурно-строительный
университет (Сибстрин), 2008
1. Основные теоретические положения. 3
1.1. Степень кинематической неопределимости сооружения 3
1.2. Основная система метода перемещений. 5
1.3. Система канонических уравнений метода перемещений 7
1.4. Стандартные задачи метода перемещений в расчётах на прочность 10
1.5. Определение коэффициентов при неизвестных и свободных членов системы канонических уравнений. 15
1.6. Определение внутренних усилий в заданном сооружении. Промежуточные и окончательные проверки правильности решения. 17
1.7. Расчет статически неопределимых систем методом перемещений в матричной форме. 19
2. Содержание расчетного индивидуального задания и исходные данные. 25
3. Пример выполнения индивидуального задания 32
3.1. Исходные данные. 32
3.2. Вычисление погонных жесткостей стержней рамы. 33
3.3. Вычисление степени кинематической неопределимости и выбор основной системы метода перемещений. 34
3.4. Построение деформационных схем и соответствующих им эпюр изгибающих моментов в единичных состояниях основной системы метода перемещений 35
3.5. Построение эпюр изгибающих моментов в ОСМП от внешних воздействий 37
3.6. Вычисление коэффициентов системы канонических уравнений метода перемещений. 39
3.7. Проверка правильности вычисления коэффициентов системы канонических уравнений метода перемещений. 41
3.8. Составление матриц для расчета рамы. 44
3.9. Исходные данные для расчета рамы по программе «METDEF» 48
3.10. Результаты расчета по программе «METDEF». 49
3.11. Построение эпюр внутренних усилий в заданной раме 50
3.12. Проверка достоверности расчета рамы на постоянную нагрузку 53
4. Вопросы для подготовки к теоретическому собеседованию по теме индивидуального задания. 56
4.1. Расчет статически неопределимых систем методом перемещений в обычной форме на силовое воздействие. 56
4.2. Расчет статически неопределимых систем методом перемещений в обычной форме на температурные и кинематические воздействия. 57
4.3. Учет симметрии статически неопределимых сооружений при их расчете методом перемещений. 58
4.4. Расчет статически неопределимых систем методом перемещений в матричной форме на все виды внешних воздействий. 59
Список литературы. 61
1. Основные теоретические положения
1.1. Степень кинематической неопределимости сооружения
При расчёте статически неопределимых систем методом перемещений сооружения рассматриваются как линейно-деформируемые, для которых справедлив принцип независимости действия сил и вытекающий из него принцип пропорциональности.
За неизвестные в методе перемещений принимаются перемещения узлов от заданных воздействий: линейные перемещения шарнирных и жёстких узлов и углы поворотов жёстких узлов. Суммарное количество неизвестных угловых nq и линейных перемещений узлов nD называется степенью кинематической неопределимости сооружения
Число неизвестных угловых перемещений nq равно количеству жёстких узлов сооружения.
Для сооружений, в которых перемещения от внешних воздействий обусловлены преимущественно изгибными деформациями, при определении числа линейных перемещений узлов вводятся дополнительные допущения:
1. Элементы сооружения считаются нерастяжимыми и несжимаемыми, т.е. изменением их длин под действием продольных сил пренебрегают.
2. Предполагается, что длины хорд искривлённых стержней равны их первоначальным длинам.
При этих допущениях число независимых линейных перемещений узлов сооружения nD можно определить по его шарнирной схеме, полученной из заданного сооружения введением во все его жёсткие узлы, включая и опорные, режущих цилиндрических шарниров. Степень свободы полученной таким образом шарнирной схемы будет равна числу независимых линейных перемещений узлов заданной системы. Для подсчета количества степеней cвободы плоской шарнирно-стержневой системы W используют формулу:
где У – число узлов; С – число стержней, соединяющих узлы; Со – число опорных связей.
Пример. Определить степень кинематической неопределимости рам, показанных на рис. 1.
Рис. 1,а: nq = 5, так как рама имеет пять жестких узлов (A, B, C, D, E), nD = W = 2У – C – Cо = 2 × 6 – 7 – 2 = 3 (узлы шарнирной схемы 1–6; стержни, соединяющие эти узлы, 12, 23, 45, 56, 14, 25, 36; опорные связи 44′, 66′); nkin = nq + nD = 5 + 3 = 8.
Рис.1,б: nq = 2 (узлы A и B); nD = W = 2 × 2 – 1 – 3 = 0 (узлы шарнирной схемы 1 и 2; стержень, соединяющий эти узлы, 12; опорные связи 11′, 22′, 22»); nkin = 2 + 0 = 2.
Рис.1,в: nq = 3 (узлы A, B, С); nD = W = 2 × 7 – 6 – 6 = 2 (узлы шарнирной схемы 1–7; стержни, соединяющие эти узлы, 12, 23, 34, 45, 56, 67; опорные связи 11′, 22′, 33′, 55′, 66′, 77′); nkin = 3 + 2 = 5.
1.2. Основная система метода перемещений
Основная система метода перемещений (ОСМП) образуется наложением на узлы сооружения связей, препятствующих их угловым и линейным перемещениям. Если число наложенных на узлы угловых и линейных связей совпадает со степенью кинематической неопределимости сооружения, то в основной системе метода перемещений все узлы будут неподвижными.
 Такой способ выбора основной системы позволяет представить любую плоскую стержневую систему в виде набора стандартных стержней трех типов (рис. 2). На любое воздействие (силовое, температурное, кинематическое) каждый из этих произвольно ориентированных на плоскости стержней может быть заранее рассчитан, например, методом сил.
Такой способ выбора основной системы позволяет представить любую плоскую стержневую систему в виде набора стандартных стержней трех типов (рис. 2). На любое воздействие (силовое, температурное, кинематическое) каждый из этих произвольно ориентированных на плоскости стержней может быть заранее рассчитан, например, методом сил.
Используя основную систему метода перемещений и результаты расчета стандартных стержней (см. рис. 2), определим угловые и линейные перемещения узлов заданного сооружения и внутренние усилия в нем от любых воздействий (см. п. 1.3–1.6 настоящих методических указаний).
Пример. Для рам, показанных на рис. 1, выбрать ОСМП.
Рис. 1,а (nq = 5, nD = 3). Угловые связи 1–5 накладываются на жесткие узлы A, B, C, D, E (рис. 3). Наложение линейных связей 6–8 на узлы может быть произведено различными способами. На рис. 3 показаны два варианта размещения линейных связей 6–8. Читателям предлагается выполнить кинематический анализ шарнирной схемы рамы для каждого из вариантов основной системы метода перемещений и убедиться в правильности размещения этих линейных связей, т.е. в геометрической неизменяемости шарнирной схемы рамы.
 Рис. 1,б (nq = 2, nD = 0). Так как для этой рамы nD = 0, при выборе ОСМП накладываются только угловые связи 1 и 2, препятствующие поворотам узлов A и B (рис. 4). Шарнирная схема этой рамы геометрически неизменяема и не требует наложения дополнительных линейных связей на узлы.
Рис. 1,б (nq = 2, nD = 0). Так как для этой рамы nD = 0, при выборе ОСМП накладываются только угловые связи 1 и 2, препятствующие поворотам узлов A и B (рис. 4). Шарнирная схема этой рамы геометрически неизменяема и не требует наложения дополнительных линейных связей на узлы.
Рис. 1,в (nq = 3, nD = 2). Угловые связи 1, 2, 3 накладываются на жесткие узлы A, B, С (рис. 5). На этом же рисунке показаны два варианта наложения на узлы рамы линейных связей 4 и 5. Предпочтение следует отдать симметричному варианту размещения линейных связей. В теоретическом разделе курса «Строительная механика» показано, что использование симметричных основных систем метода перемещений существенно упрощает расчет сооружения.
1.3. Система канонических уравнений метода перемещений
Неизвестные угловые и линейные перемещения узлов сооружений Z1, Z2,…, Zj,…, Zn от различных внешних воздействий определяются из системы канонических уравнений метода перемещений, i-е уравнение которой отрицает реакцию в i-й наложенной связи в основной системе метода перемещений от смещения n наложенных связей на величины, равные Z1, Z2,…, Zj,…, Zn, и от внешних воздействий.
При силовом воздействии на сооружение (рис. 6,а – заданная расчетная схема, рис. 6,б – ОСМП) система канонических уравнений имеет вид:
 (3)
(3)
В случае температурных воздействий на сооружение (рис. 7,а – заданная расчетная схема, рис. 7,б – ОСМП) система канонических уравнений запишется так:
 (4)
(4)
Структура системы канонических уравнений метода перемещений при кинематических воздействиях (рис. 8,а – расчетная схема сооружения при смещении опорных связей, рис. 8,б – ОСМП) сохраняется:
 (5)
(5)
Если сооружение одновременно воспринимает воздействия различного типа (силовые, температурные, кинематические), то i-я строка системы канонических уравнений метода перемещений запишется:
В системах уравнений (3)–(5) коэффициенты при неизвестных rii называются главными, а коэффициенты rij – побочными. Физический смысл коэффициентов rii и rij – это реакции в i-й наложенной связи соответственно от смещения i-й связи на величину, равную единице, и смещения j-й связи на величину, равную единице, в основной системе метода перемещений. Побочные коэффициенты rij и rji подчиняются теореме о взаимности реакций, т.е. rij = rji.
Физический смысл свободных членов RiF, Rit, Ric систем уравнений (3)–(5) – это реакции в i-й наложенной связи соответственно от силового, температурного и кинематического воздействий в ОСМП.
Решению систем уравнений (3)–(5) предшествует вычисление коэффициентов при неизвестных rii, rij и свободных членов RiF, Rit, Ric. В методе перемещений перечисленные коэффициенты можно определить, имея эпюры внутренних усилий в основной системе от смещения наложенных связей на величины, равные единице, и от силовых, температурных и других воздействий, т.е. имея результаты расчета стандартных стержней (см. рис. 2, п. 1.2).
1.4. Стандартные задачи метода перемещений в расчётах на прочность
В п. 1.2 было отмечено, что основная система метода перемещений представляет собой набор стандартных задач трех типов (см. рис. 2). На различного рода воздействия (кинематические, силовые, температурные) каждый из стержней, изображенных на рис. 2, может быть заранее рассчитан, например, методом сил. Результаты этих расчетов приведены на рис. 9 (от смещения угловых и линейных связей), рис. 10–12 (от различных силовых воздействий), рис. 13 (от температурных воздействий). На указанных рисунках приняты следующие обозначения: q – поворот угловой связи; D – линейное перемещение одного конца стержня относительно другого (направление перемещений показано на рис. 9); i = EJ/ℓ – погонная жесткость стержня при изгибе; iп = = ЕА/ℓ – погонная жесткость стержня при растяжении–сжатии;  и
и  – величины изменений (приращений) температур со стороны внешних волокон стержня;
– величины изменений (приращений) температур со стороны внешних волокон стержня;  – перепад приращений температуры по высоте поперечного сечения стержня;
– перепад приращений температуры по высоте поперечного сечения стержня;  – приращение температуры на уровне центра тяжести поперечного сечения стержня; a – коэффициент линейного температурного расширения материала; h – высота поперечного сечения стержня в плоскости изгиба (плоскости симметрии).
– приращение температуры на уровне центра тяжести поперечного сечения стержня; a – коэффициент линейного температурного расширения материала; h – высота поперечного сечения стержня в плоскости изгиба (плоскости симметрии).
1.5. Определение коэффициентов при неизвестных и свободных членов системы канонических уравнений
Коэффициенты при неизвестных rii, rij и свободные члены RiF, Rit, Ric системы канонических уравнений метода перемещений (см. соотношения (3)–(5), п. 1.3) – это реакции в i-й наложенной связи соответственно от смещения i-й и j-й наложенных связей на величину, равную единице, а также от силовых, температурных и кинематических воздействий в ОСМП. Перечисленные реакции можно определить, используя эпюры внутренних усилий (в частности, для рам и балок – эпюры изгибающих моментов), построенные в ОСМП с помощью стандартных задач (см. рис. 9–13, п.1.4).
Реакции в наложенных связях в ОСМП можно определить, используя статический или кинематический методы.
Статическим методом реакции i-й наложенной связи в ОСМП rii, rij, RiF, Rit, Ric от различного вида воздействий определяются из условий равновесия узла или любой части сооружения, содержащих рассматриваемую i-ю связь.
Для определения реакций в i-й наложенной связи в ОСМП rii, rij, RiF кинематическим методом производят сопряжение соответствующих эпюр изгибающих моментов:
 ; (8)
; (8)
 ; (9)
; (9)
 , (10)
, (10)
где EJk – изгибная жесткость поперечного сечения на k-м грузовом участке рассматриваемого сооружения (часто EJk = const);
ℓk – длина k-го грузового участка;
nM – общее число грузовых участков;
Mik и Mjk – изгибающие моменты на k-м грузовом участке в ОСМП соответственно от смещения i-й и j-й наложенных связей на величину, равную единице;
 – изгибающие моменты на k-м грузовом участке в любой статически определимой основной системы метода сил, полученной из рассматриваемой ОСМП удалением лишних связей, в том числе обязательно и i-й связи.
– изгибающие моменты на k-м грузовом участке в любой статически определимой основной системы метода сил, полученной из рассматриваемой ОСМП удалением лишних связей, в том числе обязательно и i-й связи.
Вычисление коэффициентов rii, rij, RiF по формулам (8)–(10) можно произвести сопряжением соответствующих эпюр изгибающих моментов, используя формулу Симпсона или правило Верещагина.
Ниже, в п. 1.7, будет рассмотрено определение коэффициентов при неизвестных и свободных членов системы канонических уравнений метода перемещений в матричной форме.
1.6. Определение внутренних усилий в заданном сооружении. Промежуточные и окончательные проверки правильности решения
На данном этапе расчета стержневых систем методом перемещений мы имеем эпюры изгибающих моментов M1, M2,…, Mj,…, Mn,  ,
,  ,
,  , построенные в ОСМП от смещения наложенных связей на величины Z1 = 1, Z2 = 1,…, Zj = 1,…, Zn = 1, от силового и температурного воздействия, а также от смещения опорных связей. В результате решения системы канонических уравнений метода перемещений (3)–(5) получены значения угловых и линейных перемещений узлов заданного сооружения Z1, Z2,…, Zj,…, Zn. Окончательные эпюры изгибающих моментов от различных видов воздействий МF, Мt, Мc в заданной стержневой системе получим, используя принцип независимости действия сил:
, построенные в ОСМП от смещения наложенных связей на величины Z1 = 1, Z2 = 1,…, Zj = 1,…, Zn = 1, от силового и температурного воздействия, а также от смещения опорных связей. В результате решения системы канонических уравнений метода перемещений (3)–(5) получены значения угловых и линейных перемещений узлов заданного сооружения Z1, Z2,…, Zj,…, Zn. Окончательные эпюры изгибающих моментов от различных видов воздействий МF, Мt, Мc в заданной стержневой системе получим, используя принцип независимости действия сил:
MF = M1Z1 + M2Z2 + … + MjZj + … + MnZn + , (11)
Mt = M1Z1 + M2Z2 + … + MjZj + … + MnZn + , (12)
Mc = M1Z1 + M2Z2 + … + MjZj + … + MnZn + . (13)
Поперечные и продольные силы в сечениях заданной системы вычислим по эпюрам изгибающих моментов из условий равновесия отдельных элементов и узлов, используя методику, изложенную в п. 5.4 первой части лекций по строительной механике [5].
Многоэтапность расчета статически неопределимых сооружений методом перемещений требует проведения проверок достоверности вычисления коэффициентов системы канонических уравнений, правильности решения этой системы уравнений, а также окончательной проверки эпюр внутренних усилий, полученных в результате расчета.
Главные и побочные коэффициенты rii и rij систем канонических уравнений (3)–(5) могут быть вычислены двумя способами: статическим (из условий равновесия узлов) и кинематическим (сопряжением соответствующих эпюр изгибающих моментов, построенных в ОСМП от единичных кинематических воздействий). Кроме того, правильность вычисления любого побочного коэффициента rij может быть подтверждена независимым определением равного ему побочного коэффициента rji [7, п. 15.3].
Правильность вычисления свободных членов RiF системы канонических уравнений метода перемещений (3) можно подтвердить вычислением их двумя методами: статическим и кинематическим. При этом, используя соотношение (10), необходимо помнить, что грузовая эпюра изгибающих моментов  должна быть получена в любой статически определимой основной системе метода сил, выбирая которую необходимо удалить i-ю наложенную связь.
должна быть получена в любой статически определимой основной системе метода сил, выбирая которую необходимо удалить i-ю наложенную связь.
При необходимости можно произвести универсальную и построчные проверки правильности вычисления коэффициентов при неизвестных систем канонических уравнений (3)–(5), а также проверку достоверности определения свободных членов системы уравнений (3). Для этого (как и в методе сил [7, п. 16.5]) используют суммарную эпюру изгибающих моментов Ms, полученную в ОСМП суммированием эпюр изгибающих моментов от единичных кинематических воздействий:
С помощью эпюры изгибающих моментов Ms получим:
 = r11 + … + rjj + … + rnn + 2r12 + 2r13 +… + 2rn–1,n, (15)
= r11 + … + rjj + … + rnn + 2r12 + 2r13 +… + 2rn–1,n, (15)
 = ri1 + ri2 + … + rij + … + rin, (16)
= ri1 + ri2 + … + rij + … + rin, (16)
 = – (R1F + R2F +… + RjF + … + RnF). (17)
= – (R1F + R2F +… + RjF + … + RnF). (17)
На заключительном этапе расчета производится проверка правильности эпюр внутренних усилий, построенных в заданном статически неопределимом сооружении. Если при решении задачи ошибки отсутствовали, то узлы заданного сооружения и любые его части должны находиться в равновесии. Это следует из того, что в заданном сооружении нет связей, в которых отрицались реакции в ОСМП [8, п. 19.3].
Дополнительно для окончательной проверки эпюр внутренних усилий, полученных для заданного сооружения от силового воздействия, можно использовать любую, желательно статически определимую, основную систему метода сил, для которой должны выполняться кинематические условия:
 = 0. (18)
= 0. (18)
В соотношении (18) MF(s) – изгибающие моменты от силового воздействия в заданном сооружении, вычисленные методом перемещений,  – изгибающие моменты в основной системе метода сил от единичного усилия, действующего в направлении i-й удаленной связи.
– изгибающие моменты в основной системе метода сил от единичного усилия, действующего в направлении i-й удаленной связи.
1.7. Расчет статически неопределимых систем методом перемещений в матричной форме
Системы канонических уравнений метода перемещений (3)–(5) могут быть представлены одним матричным соотношением:
где r – матрица коэффициентов при неизвестных системы канонических уравнений метода перемещений, или матрица реакций в наложенных связях от их смещения на величину, равную единице, в ОСМП. Эта матрица называется матрицей внешней жесткости сооружения:
r =  . (20)
. (20)
Число строк и столбцов матрицы внешней жесткости сооружения равно степени его кинематической неопределимости nkin, т.е. матрица r – квадратная. В силу теоремы о взаимности реакций матрица r симметрична. Так как системы канонических уравнений метода перемещений (3)–(5) разрешимы, то определитель матрицы r не равен нулю (det r ¹ 0). Это значит, что матрица внешней жесткости сооружения – невырожденная матрица.
Z – матрица неизвестных метода перемещений, или матрица угловых и линейных перемещений узлов сооружения от заданных внешних воздействий (силовых, температурных, кинематических).
R – матрица свободных членов системы канонических уравнений метода перемещений, или матрица реакций в наложенных связях от заданных внешних воздействий в ОСМП.
Число строк в матрицах Z и R равно степени кинематической неопределенности сооружения, а число столбцов – суммарному числу заданных независимых силовых, температурных и кинематических воздействий на сооружение.
В [7, п. 22.2, лекция 22] на базе теоремы о работе концевых усилий были получены матричные соотношения для вычисления элементов матриц r и R в ОСМП:
R = a T  – c T F’. (22)
– c T F’. (22)
Конкретизируем содержание элементов матриц, входящих в выражения (21) и (22).
а – матрица концевых перемещений элементов стержневой системы (стержней) – углов поворота их концевых сечений qj и qh, а также перекосов стержней Djh, вызванных смещением наложенных угловых и линейных связей на величину, равную единице, в ОСМП. Число столбцов матрицы а равно степени кинематической неопределенности сооружения.
K – матрица внутренней жесткости сооружения. Ее элементы – концевые усилия отдельных стержней (концевые изгибающие моменты и поперечные силы), полученные от единичных перемещений концевых сечений этих стержней в ОСМП. Для всего сооружения матрица K запишется:
В квазидиагональной матрице (23) блок Kj – стандартная матрица внутренней жесткости j-го стержня. Если изгибающие моменты и поперечные силы фиксировать так, как показано на рис. 14,а, б для стандартных стержней, то матрицы Kj будут иметь вид:
Kj =  (рис. 14,а); Kj =
(рис. 14,а); Kj =  (рис. 14,б).
(рис. 14,б).
R – матрица реакций в наложенных связях от внешних воздействий в ОСМП:
Здесь RF, Rt, Rc – подматрицы реакций в наложенных связях соответственно от силовых, температурных и кинематических воздействий в ОСМП. Число столбцов матричных блоков RF, Rt, Rc определяется числом комбинаций указанных типов воздействий.
– матрица концевых изгибающих моментов и поперечных сил элементов сооружения в ОСМП от внешних силовых, температурных и кинематических воздействий:
 .
.
F’ – матрица узловых нагрузок:
В этой матрице отличными от нуля будут элементы только блока F, описывающего силовое воздействие на сооружение. Блоки, соответствующие температурным и кинематическим воздействиям, будут нулевыми. При формировании блока F матрицы F’ равнодействующую нагрузки, приложенной к отдельному стержню jh, передают узлу h, т.е. узлу, противоположно расположенному сечению j, где при формировании матрицы фиксировалась концевая поперечная сила.
с – матрица углов поворота и линейных перемещений узлов в ОСМП от смещения наложенных на узлы сооружения связей на величину, равную единице. Число столбцов матрицы с равно степени кинематической неопределенности сооружения.
Решая систему уравнений (19), получим матрицу неизвестных метода перемещений:
где r –1 – матрица, обратная к матрице внешней жесткости сооружения, т.е.
r × r –1 = E, здесь Е – единичная матрица.
После подстановки соотношений (21) и (22) в матричное выражение (24) получим:
Z = –(a T Ka) –1 (a T – a T F’). (25)
Матрицу концевых изгибающих моментов и поперечных сил
в заданном сооружении от внешних силовых, температурных и кинематических воздействий получим, используя принцип независимости действия сил
S = +  Z. (26)
Z. (26)
В матричном соотношении (26) – матрица концевых усилий элементов сооружения в ОСМП от единичных смещений наложенных связей. Эту матрицу можно представить в виде произведения:
= Ka, (27)
где K – матрица концевых усилий стержней от единичных перемещений их концевых сечений в ОСМП (см. (21)). Выше было показано, что при определенной нумерации концевых сечений стержней и при определенном порядке записи концевых изгибающих моментов и поперечных сил (см. рис. 14), матрицы K для отдельных элементов имеют стандартную структуру.
После подстановки в соотношение (26) матричных выражений (25) и (27) получим матричную формулу для расчета стержневых систем методом перемещений:
S = – Ka(a T Ka) –1 (a T – c T F’). (28)
При силовом воздействии на сооружение, когда S = SF, = F, F’ = F, структура матричной зависимости (28) сохраняется:
SF = F – Ka(a T Ka) –1 (a T F – c T F). (29)
В случае температурного воздействия S = St, = t, F’ = 0 и, следовательно,
St = t – Ka(a T Ka) –1 (a T t). (30)
При кинематическом воздействии, в частности, при смещении опорных связей, матричная зависимость для определения концевых усилий в стержнях заданного сооружения аналогична матричной зависимости (30):
Sс = с – Ka(a T Ka) –1 (a T с). (31)
Проверка правильности расчета заданного сооружения методом перемещений в матричной форме производится на основе теоремы о работе концевых усилий:
– в общем случае внешних воздействий
a T S – c T F’ = 0;
– при силовых воздействиях
a T SF – c T F = 0;
– при температурных и кинематических воздействиях
Для расчета стержневых систем методом перемещений на персональных ЭВМ может быть использована программа «METDEF» , разработанная на кафедре строительной механики НГАСУ (Сибстрин) профессором В.Г. Себешевым и доцентом В.Н. Барышниковым.
2. Содержание расчетного индивидуального задания и исходные данные
Для заданной статически неопределимой рамы (рис. 15) требуется:
1. Определить степень кинематической неопределимости рамы и выбрать для ее расчета ОСМП.
2. В ОСМП построить деформационные схемы и соответствующие им эпюры изгибающих моментов от смещения каждой наложенной связи на величину, равную единице, и отдельно от каждого из внешних воздействий (силового, температурного, смещения опорных связей).
3. Вычислить коэффициенты при неизвестных и свободные члены системы канонических уравнений метода перемещений (только при воздействии постоянной нагрузки).
4. Выполнить проверку правильности вычислений коэффициентов при неизвестных и свободных членов системы канонических уравнений метода перемещений:
а) rii – сопряжением соответствующих эпюр изгибающих моментов;
б) rij – с помощью теоремы о взаимности реакций;
в) RiF – с использованием статически определимой основной системы метода сил.
5. Подготовить исходные данные и матрицы для расчета рамы на ЭВМ по программе «METDEF».
6. По результатам расчета на ЭВМ построить в заданной раме эпюры M, Q и N от постоянной нагрузки, температурных воздействий и смещения опорных связей (отдельно).
7. Выполнить статическую и кинематическую проверки правильности построенных эпюр внутренних усилий от постоянной нагрузки.
Исходные числовые данные для индивидуального расчета задания приведены в табл. 1.
Примечания. 1. EI1 и h1 – жесткость при изгибе и высота прямоугольного поперечного сечения горизонтальных элементов рамы.
2. EI2 и h2 – жесткость при изгибе и высота прямоугольного поперечного сечения вертикальных и наклонных элементов рамы.
3. Поперечное сечение всех элементов рамы симметрично относительно плоскости изгиба.
4. Изменение температуры на Dt° происходит на отмеченных штриховыми линиями поверхностях стержней.
5. Для всех вариантов принять: a =  , a’ =
, a’ =  , a = 12×10 –6 1/°С.
, a = 12×10 –6 1/°С.
Рис. 15 (продолжение)
Рис. 15 (продолжение)
Рис. 15 (продолжение)
Рис. 15 (окончание)
3. Пример выполнения индивидуального задания
3.1. Исходные данные
 В соответствии с содержанием индивидуального задания (см. раздел 2) требуется выполнить расчет статически неопределимой рамы (рис. 16) методом перемещений.
В соответствии с содержанием индивидуального задания (см. раздел 2) требуется выполнить расчет статически неопределимой рамы (рис. 16) методом перемещений.
Рама испытывает следующие независимые друг от друга внешние воздействия:
1. Силовое (постоянная нагрузка): q = = 24 кН/м, F = 36 кН, М = 60 кН×м.
2. Изменение температуры Dt° = 60 °С на поверхности стержней, отмеченных пунктирной линией.
3. Смещение опорных связей: D(1) = 2 см, D(2) = 1 см, D(3) = 0,001 рад.
Изгибные жесткости прямоугольных поперечных сечений элементов рамы в плоскости изгиба рамы: EJ1 – для горизонтальных стержней, EJ2 – для вертикальных и наклонного стержней; высоты поперечных сечений: h1 = 0,3 м – для горизонтальных стержней, h2 = 0,4 м – для вертикальных и наклонного стержней.
Дополнительные исходные данные: EJ1 : EJ2 = 2, EJ1 = 3×10 4 кН×м 2 , EJ2 = 1,5×10 4 кН×м 2 ; коэффициент линейного температурного расширения материала a = 12×10 –6 1/°С.
3.2. Вычисление погонных жесткостей стержней рамы
А) В расчете на силовое воздействие учитываем относительные значения изгибных жесткостей поперечных сечений элементов рамы (рис. 17,а):
i1 =  = 0,25EJ2 = 1,25;
= 0,25EJ2 = 1,25;
i2 =  = 0,4EJ2 = 2;
= 0,4EJ2 = 2;
i3 = = 0,25EJ2 = 1,25;
i4 =  = 0,333EJ2 = 1,667;
= 0,333EJ2 = 1,667;
i5 =  = 0,2EJ2 = 1.
= 0,2EJ2 = 1.
Погонную жесткость стержня 2В (рис. 17,а) примем равной единице (i5 = 1) и выразим погонные жесткости остальных стержней через i5.
Б) В расчетах на температурное воздействие и смещение опорных связей обязателен учет абсолютных значений изгибных жесткостей поперечных сечений элементов рамы (рис. 17,б):
i1 =  = 0,375×10 4 кН×м;
= 0,375×10 4 кН×м;
i2 =  = 0,6×10 4 кН×м;
= 0,6×10 4 кН×м;
i3 = = 0,375×10 4 кН×м;
i4 =  = 0,5×10 4 кН×м;
= 0,5×10 4 кН×м;
i5 =  = 0,3×10 4 кН×м.
= 0,3×10 4 кН×м.
3.3. Вычисление степени кинематической неопределимости и выбор основной системы метода перемещений
Для заданной рамы nkin = nq + nD = 2 + 1 = 3. Число неизвестных угловых перемещений узлов рамы nq = 2 (узлы 3 и 2 – рис. 16). Число независимых линейных перемещений узлов рамы определим по ее шарнирной схеме (рис. 18,а). Степень свободы полученной шарнирной схемы W = 2У – C – Cо = 2×3 – 2 – 3 = 1, следовательно nD = 1. Правильное наложение одной линейной связи на узлы нашей шарнирной схемы должно обеспечить ее геометрическую неизменяемость (рис. 18,а)
ОСМП образована наложением двух угловых связей («плавающих» заделок) на узлы 3 и 2 и одной линейной горизонтальной связи на узел 2 (рис. 18,б). За неизвестные в расчете данной рамы приняты: углы поворотов узлов 3 и 2 – Z1 и Z2 и горизонтально перемещение узла 2–Z3. Эти неизвестные определим из системы канонических уравнений метода перемещений, которая в общем случае силового воздействия запишется:
3.4. Построение деформационных схем и соответствующих им эпюр изгибающих моментов в единичных состояниях основной системы метода перемещений
Деформационные схемы стержней рамы в ОСМП, построенные от поворота первой и второй наложенных угловых связей по часовой стрелке на величину, равную единице, показаны на рис. 19,а, б.
Деформационную схему рамы в ОСМП от единичного смещения линейной связи вправо (рис. 19,в) получим, предварительно построив план перемещений узлов рамы (рис. 19,г). Поместив в полюсе полярного плана перемещений неподвижные точки А, В, С, зададим перемещение узлу 2 в направлении, перпендикулярном оси стержня 2В. Зная линейное перемещение узла 2, последовательно определим перемещения узлов 1 и 3. Проекцию истинного перемещения узла 2 на горизонтальную ось принимаем равной единице. По плану перемещений, используя элементарные геометрические и тригонометрические положения, определим перекосы элементов рамы: D1A = D23 = 1, D12 = D3C = = 0,75, D2B = 1,25 (рис. 19,в, г).
Эпюры изгибающих моментов от единичных смещений наложенных связей в ОСМП изображены рядом с соответствующими деформационными схемами на рис. 19,а, б, в. Для их построения использованы стандартные задачи метода перемещений от кинематических воздействий (см. рис. 9).
3.5. Построение эпюр изгибающих моментов в ОСМП от внешних воздействий
 Основой для построения в ОСМП эпюр изгибающих моментов от постоянной нагрузки, температурного воздействия и смещения опорных связей служат стандартные задачи метода перемещений, показанные на рис. 9–13. При отсутствии на этих рисунках каких-то стандартных задач от силового воздействия необходимо воспользоваться источниками, перечисленными в списке рекомендуемой литературы.
Основой для построения в ОСМП эпюр изгибающих моментов от постоянной нагрузки, температурного воздействия и смещения опорных связей служат стандартные задачи метода перемещений, показанные на рис. 9–13. При отсутствии на этих рисунках каких-то стандартных задач от силового воздействия необходимо воспользоваться источниками, перечисленными в списке рекомендуемой литературы.
На рис. 20 изображена эпюра изгибающих моментов MF в ОСМП от постоянной нагрузки. Необходимо помнить, что в ОСМП от узловых нагрузок эпюра изгибающих моментов отсутствует (в нашем случае от вертикальной силы F, приложенной к узлу 3). На рис. 21 и 22 даны подробные пояснения к построению эпюр изгибающих моментов в ОСМП от заданного изменения температуры (Mt) и от смещения опорных связей (Мс). Напоминаем, что эпюра изгибающих моментов Mt = M’t + M»t, где M’t – эпюра изгибающих моментов от равномерных приращений температуры D ; M»t – то же от неравномерных приращений температуры D
; M»t – то же от неравномерных приращений температуры D .
.
3.6. Вычисление коэффициентов системы канонических уравнений метода перемещений
Коэффициенты при неизвестных и свободные члены системы канонических уравнений метода перемещений вычислим статическим методом. Используем для этого эпюры изгибающих моментов М1, М2, М3 (см. рис. 19), построенные в ОСМП от единичных смещений наложенных связей, а также эпюру изгибающих моментов MF, полученную в ОСМП от постоянной нагрузки (см. рис. 20). Рис. 23,а поясняет вычисление в ОСМП реакций в первой наложенной связи r11, r12, r13, R1F от поочередного смещения всех наложенных связей на величину, равную единице, и от постоянной нагрузки; рис. 23,б – реакций во второй наложенной связи r21, r22, r23, R2F от тех же воздействий. Так как наложенные связи 1 и 2 угловые, то при вычислении реакций в них учитываем только изгибающие моменты в концевых сечениях стержней.

По этой причине на рис. 23 при изображении отдельных узлов мы не показываем поперечных и продольных сил в сечениях около узлов.
Вычисление реакций r31, r32, r33, R3F в линейной связи 3 проиллюстрировано на рис. 24. Любую из этих реакций вычисляем в следующей последовательности: из равновесия узла 1 находим продольную силу N12 в стержне 12; из равновесия узла 3 вычислим продольную силу N32 в стержне 32; определяем требуемую реакцию из равновесия узла 2. На рис. 24 не показаны изгибающие моменты в сечениях около узлов, так как в условия равновесия в форме проекций сил на какие-то оси они не входят.
3.7. Проверка правильности вычисления коэффициентов системы канонических уравнений метода перемещений
Побочные коэффициенты при неизвестных системы канонических уравнений метода перемещений rij в п. 3.6 были вычислены статическим методом. Достоверность их определения подтверждается теоремой о взаимности реакций. Из рис. 23 и 24 видно, что r12 = r21, r13 = r31, r23 = r32.
Вычисление главных коэффициентов при неизвестных системы канонических уравнений метода перемещений для проверки произведем повторно кинематическим методом.
r11 = 
+
r22 = 
+
r33 = 
+
+
Приведенные вычисления показывают, что значения главных коэффициентов r11, r22, r33, ранее вычисленные статическим методом (см. рис. 23 и 24) и результаты вышеперечисленных сопряжений эпюр изгибающих моментов М1, М2, М3 (см. рис. 19) совпадают. Следует заметить, что изгибные жесткости поперечных сечений элементов рамы привязаны к принятым в п. 3.2 значениям погонных жесткостей:
Проверку свободных членов системы канонических уравнений метода перемещений, т.е. грузовых коэффициентов, ранее полученных статическим методом в п. 3.6 (см. рис. 23, 24) произведем кинематическим методом, используя статически определимую основную систему метода сил (рис. 25,а) и эпюру изгибающих моментов, построенную в ней, от постоянной нагрузки (рис. 25,б).
R1F = –
+
R2F = –
+
R3F = –
–
+
+
Результаты вышеприведенных сопряжений эпюр изгибающих моментов М1, М2, М3 с эпюрой М  подтверждают правильность вычислений грузовых коэффициентов R1F, R2F, R3F.
подтверждают правильность вычислений грузовых коэффициентов R1F, R2F, R3F.
3.8. Составление матриц для расчета рамы
Для расчета статически неопределимых систем методом перемещений на многовариантные внешние воздействия, включающие силовые, температурные и смещение опорных связей, используется матричное соотношение (28):
S =  .
.
Составлению матриц а и предшествует нумерация элементов рамы, сечений, в которых фиксируются концевые перемещения стержней (рис. 26,а) и их концевые усилия (рис. 26,б). Набор концевых перемещений и концевых усилий стержней увязан с теоремой о работе концевых усилий. В соответствии с одним из вариантов формулировки этой теоремы концевые изгибающие моменты фиксируются в двух сечениях, а концевая поперечная сила – в одном. В концевых сечениях около цилиндрических шарниров изгибающие моменты равны нулю и в матрицу не включаются. Порядок записи концевых усилий для отдельного стержня стандартизирован: первым записывается изгибающий момент в одном из концевых сечений, затем – поперечная сила в любом из концевых сечений и, наконец, – изгибающий момент в другом концевом сечении (см. рис. 26,б). Соблюдение этого порядка записи позволяет матрицу внутренней жесткости j-го стандартного элемента Kj по программе «METDEF» формировать автоматически.
Используя деформационные схемы рамы в единичных состояниях ОСМП, формируем матрицу а – матрицу поворотов концевых сечений стержней и их перекосов от единичных смещений наложенных связей. Правило знаков при составлении матрицы а: повороты концевых сечений, в случае если они происходят по часовой стрелке, считаются положительными и отрицательными, – если против хода часовой стрелки. Перекос j-го элемента Djh положителен, если поворот хорды, стягивающей его концы, по отношению к первоначальному положению оси стержня происходит по ходу часовой стрелки, и отрицателен, – если против хода часовой стрелки.
Матрица концевых усилий состоит из трех блоков:
= [F t C].
Элементы каждого из блоков матрицы – это концевые изгибающие моменты и поперечные силы в ОСМП соответственно от постоянной нагрузки (в нашем случае – первый столбец), от изменения температуры (второй столбец) и от смещения связей (третий столбец).
Для формирования матрицы используем эпюры изгибающих моментов, построенных в ОСМП от силового воздействия МF (см. рис. 20), от приращения температуры Мt (см. рис. 21,д) и от смещения опорных связей Мс (см. рис. 22). Концевые поперечные силы от указанных воздействий по эпюрам изгибающих моментов МF, Мt, Мс читателям предлагается вычислить самостоятельно. Правило знаков при формировании матрицы : концевые изгибающие моменты и концевые поперечные силы считаются положительными, если стержень они вращают по ходу часовой стрелки, и отрицательными, – если против хода часовой стрелки.
Матрица узловых нагрузок F’ от заданных воздействий на раму имеет вид:
F’ = [F 0 0], где F – матрица узловых нагрузок, входящих в состав силового воздействия. Нулевые блоки описывают температурные и кинематические воздействия, не имеющих силовых потенциалов.
В матрицу F помимо непосредственно действующих силовых нагрузок (сосредоточенных моментов и сосредоточенных сил) в соответствии с теоремой о работе концевых усилий включаются равнодействующие нагрузок, приложенных к стержням  рамы. Эти равнодействующие передаются узлам, расположенным противоположно по отношению к концевым сечениям, где ранее при формировании матрицы фиксировались поперечные силы. На рис. 27 показана схема узловых нагрузок для нашей рамы. Элементы А1 и 23 не загружены; равнодействующая сосредоточенного момента, приложенного к стержню 3С равна нулю; равнодействующая нагрузки элемента 12 F1y = 24×5 = 120 кН передается узлу 1; сосредоточенная сила, приложенная к элементу 2В, – узлу В.
рамы. Эти равнодействующие передаются узлам, расположенным противоположно по отношению к концевым сечениям, где ранее при формировании матрицы фиксировались поперечные силы. На рис. 27 показана схема узловых нагрузок для нашей рамы. Элементы А1 и 23 не загружены; равнодействующая сосредоточенного момента, приложенного к стержню 3С равна нулю; равнодействующая нагрузки элемента 12 F1y = 24×5 = 120 кН передается узлу 1; сосредоточенная сила, приложенная к элементу 2В, – узлу В.
Формирование матрицы F производим, последовательно обходя узлы в установленном нами порядке: А, 1, 2, 3, С, В. Для каждого узла первым записываем сосредоточенный момент (если он имеется), второй – горизонтальную сосредоточенную силу, третьей – вертикальную сосредоточенную силу. Знак сосредоточенных сил привязывает к принятой системе координат (см. рис. 27). Сосредоточенный узловой момент, действующий по ходу часовой стрелки, считается положительным, против хода часовой стрелки – отрицательным. При отсутствии в рассматриваемом узле каких-либо компонент узловой нагрузки их нулевые значения в матрице F фиксировать не будем.
F’ =  C =
C = 
Матрицу угловых и линейных перемещений узлов с в ОСМП, вызванных единичным смещением наложенных связей, удобно формировать после составления блока F матрицы F’, используя деформационные схемы рамы и план перемещений ее узлов (см. рис. 19). Знаки линейных узловых перемещений привязываем к принятой системе координат (см. рис. 27), повороты узлов по ходу часовой стрелки считаем положительными. Первый столбец матрицы с описывает вертикальные перемещения узла 1, вертикальное перемещение узла 3 и горизонтальное перемещение узла В от поворота первой наложенной связи на величину, равную единице; второй столбец – эти же перемещения от единичного поворота второй наложенной связи; третий – то же от единичного смещения линейной связи в ОСМП.
Выше уже упоминалось, что матрицы внутренней жесткости отдельных элементов рамы Kj по программе «METDEF» формируются автоматически, если исходные данные, введенные в компьютер, содержат указание типа стандартного стержня, его погонную жесткость и длину.
3.9. Исходные данные для расчета рамы по программе «METDEF»
Степень кинематической неопределимости системы – 3.
Число элементов ОСМП – 5.
Суммарное число перемещений концевых сечений элементов ОСМП – 13.
Число вариантов заданных воздействий – 3.
Число перемещений узлов системы, к которым приложена нагрузка – 3.
Длины элементов – 4, 5, 4, 6, 5.
Отношения погонных жесткостей элементов – 1.25, 2, 1.25, 1.667, 1.
Типы элементов – 2, 2, 1, 1, 1.
[а] – матрица перемещений концевых сечений элементов ОСМП в единичных состояниях (матрица транспонирована):
0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0
(в строку записывается первый столбец матрицы а, затем аналогично второй и третий).
[ ] – матрица усилий в концевых сечениях элементов ОСМП от всех вариантов заданных воздействий (матрица транспонирована):
] – матрица усилий в концевых сечениях элементов ОСМП от всех вариантов заданных воздействий (матрица транспонирована):
0, 0, 75, – 75, 0, 0, 0, 15, –15, 15, –18, 14.4, 18
(в строку записывается первый столбец матрицы , затем аналогично второй и третий).
[с] – матрица смещений узлов в единичных состояниях ОСМП (матрица транспонирована):
[F] – матрица узловых нагрузок по вариантам заданных воздействий (матрица транспонирована):
3.10. Результаты расчета по программе «METDEF»
На печать выдаются следующие расчетные параметры:
1. Матрица [r] внешней жесткости ОСМП (коэффициенты при неизвестных системы канонических уравнений метода перемещений):
r = 
2. Матрица [R] свободных членов системы канонических уравнений перемещений по вариантам воздействий:
R = 
3. Матрица [Z] основных неизвестных метода перемещений по вариантам воздействий:
Z = 
4. Матрица [S] усилий в концевых сечениях элементов заданной системы по вариантам воздействий:
3.11. Построение эпюр внутренних усилий в заданной раме
Используя элементы матрицы S и округляя их до сотых, строим эпюры изгибающих моментов в заданной раме:
Mconst – от постоянной нагрузки (рис. 28,а);
MT – от изменений температуры (рис. 28,б) и MD – смещения опорных связей (рис. 28,в).
По эпюрам изгибающих моментов Мconst, МT, МD, частично используя данные матрицы S о концевых поперечных силах в сечениях 1, 2, 3, 5, 7 рамы и вычисляя недостающие ординаты эпюры поперечных сил Qconst в левом