Дифференциальные уравнения и системы уравнений
Для решения дифференциальных уравнений и систем в MATLAB предусмотрены следующие функции ode45(f, interval, X0 [, options]), ode23(f, interval, X0 [, options]), ode113(f, interval, X0 [, options]), odel5s(f, interval, X0 [, options]), ode23s(f, interval, X0 [, options]), ode23t (f, interval, X0 [,options]) и ode23tb(f, interval, X0 [, options]).
Входными параметрами этих функций являются:
- f — вектор-функция для вычисления правой части уравнения системы уравнений
- interval — массив из двух чисел, определяющий интервал интегрирования дифференциального уравнения или системы;
- Х0 — вектор начальных условий системы дифференциальных систем
- options — параметры управления ходом решения дифференциального уравнения или системы.
Все функции возвращают:
- массив Т — координаты узлов сетки, в которых ищется решение;
- матрицу X, i-й столбец которой является значением вектор-функции решения в узле Тi
В функции ode45 реализован метод Рунге-Кутта 4-5 порядка точности, в функции ode23 также реализован метод Рунге-Кутта, но 2-3 порядка, а функция ode113 реализует метод Адамса.
В М-файле с именем pr 7. m пишем:
Потом в командном окне вызываем функцию ode113:
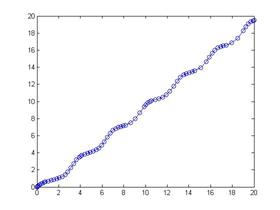
ode113(@pr7,[0 20],0) %Метод Адамса: @ pr 7 – ссылка на М-функцию, [0 20]- интервалы интегрирования,0 — условие: y(0)=0
Результатом будет график:
Необходимо реализовать метод Рунге-Кутта 4 порядка и решить задачу Коши для предложенной системы дифференциальных уравнений:

В М-файле с именем pr 8. m пишем:
Потом в командном окне вызываем функцию ode 45:
Решение систем обыкновенных дифференциальных уравнений в среде MATLAB. Часть 1
В среде MATLAB можно решать системы диффуров с начальными условиями, краевые задачи, а также решать дифференциальные уравнения в частных производных с помощью инструмента PDE toolbox.
В данном обзоре речь пойдет лишь о системах дифференциальных уравнений с начальными условиями, то есть о задаче Коши. В англоязычной литературе это называется Initial Value Problem.
- каким образом записывать системы диффуров
- как задать начальные условия
- временной интервал
- какой получать результат решения для дальнего использования
Решать системы обыкновенных дифференциальных уравнений можно как в MATLAB, так и в Simulink.

В первую очередь, следует определиться, использовать для решения Matlab и его текстовый редактор, или Simulink, где те же системы дифференциальных уравнений могут быть записаны в виде функциональных блоков.
Выбор ваш должен зависеть от задачи. Если Вы, например, хотите смоделировать какой-либо объект управления, описываемый системой диффуров, то в данном случае имеет смысл использовать именно Simulink, так как Вам, впоследствии, понадобиться синтез, например, системы управления, и Simulink подойдет здесь как нельзя лучше.
А вот если у Вас, например, есть необходимость решать системы диффуров с большим количеством уравнений и неизвестных, или специфика Вашей задачи требует особой и специальной настройки численного метода, а также если вы хотите использовать решение диффура в составе других скриптов MATLAB, то Вам имеет смысл решать дифференциальные уравнения способом, о котором пойдёт речь в этом обзоре.
Рассмотрим синтаксис решателей matlab.В качестве аргументов следует подать правую часть системы в виде MATLAB-функции.
На рисунке показан требуемый вид системы, когда выражены старшие производные.

Системы, чей вид отличается от требуемого, следует преобразовать к таковому.
Если функция простая, то её можно записать прямо в поле аргумента, однако, когда речь идёт о системах уравнений, имеет смысл записывать систему уравнений в виде отдельной функции, в том числе и в виде отдельного м-файла. Об этом мы поговорим чуть позже и на конкретном примере.
Также подается интервал времени, на котором будет найдено решение. Интервал задаётся строкой из двух чисел: начальной величины независимого аргумента t и его конечного значения.
Далее задаются начальные условия. Значения всех неизвестных искомых переменных в начале расчёта задаются в виде столбца соответствующей размерности.
Далее, при необходимости, задаются опции. Вот тут и раскрываются широкие возможности MATLAB по настройке решателя. Помимо управления точностью и величиной шага, имеется возможность обрабатывать данные в процессе вычисления, а также выполнять скрипты по завершению вычисления. Но ещё более полезным является опция отслеживания событий по условию, более подробно поговорим об этом дальше. Также есть другие специальные опции, которые могут быть использованы при решении определённых типов систем.
Вы могли заметить, что название функции — odeXY – это обозначение для всех решателей, которых всего 8 штук. В данном ролике мы пользоваться решателем ode45, соответствующего численному по методу Дормана-Принса 4(5). Этого решателя достаточно для подавляющего большинства задач. Остальные решатели будут подробно рассмотрены в приложении к задачам соответствующих типов позже.
Перейдем к примерам.
Рассмотрим 2 примера:
- решение дифференциального уравнения первого порядка.
- решение системы двух дифференциальных уравнений второго порядка.
В качестве уравнение первого порядка рассмотрим логистическое уравнение Ферхюльста, которое описывает динамику численности популяции. Суть уравнения такова: скорость прироста населения y пропорциональна количеству населения, однако лимитирована максимальной численностью популяции.
Забавный факт: Ферхюльст назвал это уравнение логистическим, и никто до сих пор не знает почему, ибо сам Ферхюльст об этом никому не рассказал.
Решение этого дифференциального уравнения выглядит следующим образом.
Пишем функцию в явном виде, задаём интервал расчёта и записываем начальное условие. Пару слов о записи функции подобным образом. Знак собаки в матлабе является оператором создания функции соответствующих переменных. Вы задаёте аргументы функции и саму функцию через пробел, как показано на рисунке.

Перейдем в окно MATLABа и посмотрим, как это выглядит.
Так выглядит скрипт:

Так выглядит график решения дифференциального уравнения:

В качестве примера решения системы, состоящей из двух дифференциальных уравнений второго порядка, рассмотрим шарик, подвешенный на пружине, который ещё и тормозит о воздух.

Уравнения показаны на рисунке. Но вид системы отличается от требуемого, в том числе потому, что в нём присутствуют вторые производные. Для приведения системы в требуемый вид выполним 2 простых шага:
Первое: следует заменить переменные соответствующим образом. Теперь у нас 4 неизвестных. Далее следует преобразовать уравнение с учетом замены. Таким образом, мы имеем систему из четырёх дифференциальных уравнений первого порядка.
Настало время её записать.

Итак, мы имеем систему, параметры, интервал времени и начальные условия. Решим же эту задачу скорее.
В отличие от предыдущего примера, систему четырех уравнений проблематично записать в поле аргумента. Поэтому всю систему будем записывать в отдельную функцию.
Эту функцию можно располагать как в самом скрипте решения в самом его конце, так и в виде отдельного m-файла.
На выходе функция должна представлять собой вектор-столбец, который записывается перечислением компонент через точку запятой как показано на рисунке.
Теперь рассмотрим скрипт самого решения.
На этот раз запишем интервал и начальные условия в виде переменных MATLAB. Интервал, соответственно, в виде строки, а начальные условия – в виде столбца длинной 4.
Сообразно с уже разобранным ранее синтаксисом укажем функцию pendulum_np, интервал времени и начальные условия.
Перейдем теперь в окно MATLAB и посмотрим решение.
Так выглядит скрипт:

 Запускаем скрипт и получаем графики:
Запускаем скрипт и получаем графики:

Зачастую хочется, чтобы одну и ту же систему можно было бы решать с разными параметрами, и при этом не менять их в теле самой функции. И это можно, и даже нужно осуществлять.
На рисунке показана функция MATLAB, которая соответствует движению подвешенного на пружине шара, однако можно заметить, что эта функция теперь имеет на 5 аргументов больше.

Параметры задаются в скрипте, а при вызове функции мы обращаемся к уже известному оператору-собаке, которая превращает функцию семи переменных pendulum_n в функцию двух переменных t и X. Вот и всё.
Я вам очень рекомендую разобраться с тем, как работает оператор-собака. В хелпе он называется function-handle. Разобравшись с ним Вам будет работать в среде MATLAB ещё проще и ещё приятнее.
Вывод: не так страшно решать диффуры
Под конец стоит сказать какие вообще системы дифференциальных уравнений матлаб может решать, а может он решать системы практически любых типов.
Их можно, с одной стороны, разделить по степени жёсткости, а с другой стороны, по структуре самой системы.
Когда уравнения представляют поведение системы, которая содержит ряд быстрых и медленных реакций, то такую систему уравнения можно назвать жесткой. Для жестких задач явные численные методы работают плохо, или не работают вовсе. Примером жесткой задачи может являться протекание тока через клеточную мембрану. На самом деле, чёткого разделения между жесткими и нежёсткими системами не существует. Степень жесткости системы формально определяется через собственные значения матрицы Якоби, но давайте не будем закапываться.
Видеообзор по теме решения систем Д/У доступен по ссылке.
Система дифференциальных уравнений в матлабе
3 -е занятие по MATLAB
ЛАБОРАТОРНАЯ РАБОТА №3
Трехмерная графика в MATLAB .
Решение обыкновенных дифференциальных уравнений в MATLAB .
1. Элементарная трехмерная (3- D ) графика — функция plot 3.
Функция plot 3 в определенном смысле является аналогом функции plot . С помощью plot 3 формируется построение линии в трехмерном пространстве по заданным трем векторам .
Пример 1.1. Построение трехмерной пространственной спирали.
t =0:0.05:9* pi ; x =2* sin ( t ); y = cos ( t ); % t , x , y — вектора одинакового размера
xlabel( ‘о сь X’ ),ylabel( ‘ось Y’ ),zlabel( ‘ось Z-t’ )
title(‘ Пространственная спираль ‘)
% Сохранить программу в текстовом редакторе MATLAB, например, под именем sp3
% Поменять местами x, y, t в функции plot3
% Сменить начертание и цвет графика
% Добавить пояснение к начертанию в виде легенды — legend( ‘ звездочки ‘ )
%Установить следующий диапазон для t: t=-9*pi:0.05:9*pi;
% Пояснения к графику с помощью функций gtext для 3D-графики не применяются
Пример 1.2. Построение сферы по окружностям.
n=input(‘n=’); % Клавиатурный ввод числа n по запросу в командном окне
t2=(pi/2)*(-n:5:n)’/n ; % транспонированный вектор
E=ones(size(t1)); % матрица единиц размерности вектора t1
% Сохранить программу в текстовом редакторе MATLAB под именем sfera3 .
% Программу выполнить при различных значениях n .
% При n =100 изменить шаг в массивах t1 и t2 : для t1 и t2 одновременно: 3, 1, 10, 25, 50
% Для t1=50, для t2=1; для t1=1, для t2=50.
% Программу sfera3 выполнить без клавиатурного ввода, а для заданного числа n .
% Установить в программе различные цвета изображения сферы.
% Использовать различные коэффициенты для t1 и t2: pi/5, pi/10, pi/50, 2*pi, 5*pi одновременно
% и в сочетании с коэффициентом, равным pi (3.14), при одном из векторов ( t1 или t2).
2. Формирование прямоугольной сетки на плоскости — meshgrid .
% Результатом действия функции meshgrid является формирование «основания» в плоскости XOY для построения над этим основанием пространственной фигуры.
3. Построение пространственных сетчатых фигур — mesh.
Z = 1*x.* exp(-x.^2 — y.^2); % Коэффициент 1 заменить: 2, 5, 10, 20
% Для сравнения применить plot3(x,y,Z),grid вместо mesh(Z) .
R=sqrt(x.^2+y.^2)+0.001; %Коэфф. 0.001 введен для исключения деления на ноль
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Для сравнения применить plot3(x,y,Z),grid
4. Сетчатая поверхность с проекциями линий постоянного уровня — meshс.
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
5. Сетчатая поверхность с пьедесталом плоскости отсчета на нулевом уровне— meshz.
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
6. Построение пространственных сплошных фигур — surf.
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
1. С плошная поверхность с проекциями линий постоянного уровня — surfс.
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
% Коэффициент 1 заменить: 5, 10, 20, 0.5, 0.1
8. Стандартные сферические поверхности — sphere .
8 .1. Сфера единичного радиуса — sphere ;
» sphere % равносильно sphere(20);
8.2 Формирование сферы с произвольным радиусом, например, равным 5;
% Выполнить построения с надписями
9. Пространственное распределение вероятностей Гаусса — peaks.
peaks; % По умолчанию формируются матрицы размера 49 ´ 49, по которым строится
%поверхность с пометками координат и титульной надписью ‘Peaks’.
peaks, title(‘Gauss’); % Со специальной титульной надписью
peaks(78); % Размерность матриц построения 78 ´ 78
peaks(25); % Размерность матриц построения 25 ´ 25
z=peaks; surf(z); % Построение поверхности Гаусса по заданной 49 ´ 49 матрице z.
% Сравнить с поверхностью на основе функции mesh(z)
% Сравнить с функцией mesh(z)
z=3*peaks(78); surf(z), title(‘Gauss’) % С множителем по оси Z .
% Применить множители: 4, 10, 33, 50
Пример 9.3. Цветовые массивные уровни на плоскости от распределения Гаусса.
[X,Y,Z]=peaks; pcolor(7*X,12*Y,20*Z),title(‘Цвет’) % С расширенной %областью определения на плоскости XOY — множители 7 и 12 и с изменением по Z — коэф-
Пример 9.4. Распределение Гаусса с задаваемой областью определения на плоскости XOY.
% Функция pcolor позволяет наблюдать обл а сть определения в плоскости XOY
% Изменить шаг по x и y : 0.2, 0.1, 0.5
% Изменить границы по x и y одновременно и порознь :(-7:0.2:3),(-7:0.2:1),(-7:0.2:-1),(-7:0.2:-3)
Пример 9.5. Линии уровня трехмерной поверхности — contour.
% Линии уровня без учета масштаба плоскости XOY:
contour(peaks),grid,title(‘ Линии уровня ‘) % 10 линий уровня по умолчанию
contour(peaks,4),grid,title(‘ Линии уровня ‘) % 4 линии уровня
contour(peaks,10),grid,title(‘ Линии уровня ‘) % 10 лини q уровня
contour(peaks,15),grid,title(‘ Линии уровня ‘) % 15 лини q уровня
contour(peaks,25),grid,title(‘ Линии уровня ‘) % 25 лини q уровня
% Применить функцию contour для стандартной сферической поверхности sphere с различным числом линий уровня.
Пример 9.6. Линии уровня с учетом масштаба плоскости XOY (два примера):
Пример 9.7. Линии уровня с учетом масштаба плоскости XOY и заданным числом (три примера):
Пример 9.7. Линии уровня с цветовой окраской плоскости XOY — contourF.
contourF(peaks),title(‘Цвет линий уровня’)
Пример 9.8. «Пространственные» линии уровня — contour3.
contour3(peaks,25),title(’25 л иний уровня в пространстве ‘)
Пример 9.9. Обзор поверхности из заданной точки пространства — view.
peaks,view(10,45); % Число 10 — азимут обзора, 45 — угол обзора (все в градусах)
[X,Y]=meshgrid(-7:0.3:7,-5:0.3:5);Z=peaks(X,Y);surf(Z), view( — 10,45)
% Задать различные параметры функции view и выполнить построение различных поверхностей.
10. Пострение поверхностей относительно полярной системы координат.
Z=peaks(x1,y1);surf(x1,y1,Z),title(‘ Полярная плоскость ‘)
% С изменением точки обзора
Z=peaks(x1,y1);surf(x1,y1,Z),title(‘ Полярная плоскость ‘),view(-12,45)
11. Построение цилиндрических поверхностей — cylinder.
cylinder % Построение цилиндра без параметров, по умолчанию
cylinder(40) % Построение цилиндра с заданным размером плоскости XOY
cylinder(40,60) % Цилиндр с заданным размером плоскости XOY и числом образующих %граней — 60
% Построение совокупности цилиндрообразующих поверхностей
[x,y,z]=cylinder([5 0],160); surf(x,y,z) % Конус по заданному вектору [5,0]
[x,y,z]=cylinder([5 0 5],160); surf(x,y,z) % 2 к онуса
[x,y,z]=cylinder([5 0],3); surf(x,y,z) % Пирамида
[x,y,z]=cylinder([5 0 5],3); surf(x,y,z) % 2 пиирамиды
[x,y,z]=cylinder([5 12 12],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 5],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 12 5],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 5 12 5 12],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 12 5 18],100); surf(x,y,z)
[x,y,z]=cylinder([5 12 12 5 5 18 18],100); surf(x,y,z)
% Построение совокупности цилиндрообразующих поверхностей с масштабированием
[x,y,z]=cylinder([5 12 12 5 5 18 18],100); surf(x,y,20*z)
plot(x,20*z),grid % Масштаб плоскости XOZ
plot(7*x,y),grid % Масштаб плоскости XOY
plot(7*x,13*y),grid % Масштаб плоскости XOY
Решение обыкновенных дифференциальных уравнений в MATLAB.
Для решения обыкновенных дифференциальных уравнений (ODE) могут быть применены численные методы, которые в MATLAB реализованы в специальных функциях-решателях: ode45, ode23, ode113 .
Общий порядок программирования:
1) Создается М-функция с описанием правых частей дифференциальных уравнений;
2) Создается М-сценарий с выбранным решателем;
Пример 1. Решить следующую систему обыкновенных дифференциальных уравнений с заданными начальными условиями:

% Программа решения примера 1
% Создаем М-функцию под именем dif31.m
% Создаем М-сценарий под именем ddd45_31.m
% Сценарий решения с помощью ode45
T=[0 15]; % Интервал интегрирования
x0=[10;5]; % Начальные условия
[t,x]=ode45(‘dif31’,T,x0); %t, x — выходные переменные решателя ode45
plot(t,x),grid,title(‘ Пример 3.1 ‘),legend(‘X1′,’X2’)
% Изменить начальные условия: 
% Изменить интервал интегрирования: от 0 до 20, от 0 до 7.
% Вывести графические результаты с различным начертанием координат
% Прменить решатели ode23, ode113 . Сравнить результаты покоординатно, для чего вывести результаты решения и свести их в таблицу, например, в WORD .
Пример 2. Решить следующую систему линейных дифференциальных уравнений с заданными начальными условиями:

% Создаем М-функцию с именем dif32.m
function f=dif32(t,x); % t, x — входные переменные для М-функции
%Создаем М-сценарий под именем ddd45_32
% Сценарий решения примера 2
x0=[0;0;0]; % x0 — вектор начальных условий
% Изменить интервал интегрирования
% Изменить начальные условия
% Вывести графические результаты с различным начертанием координат
% Использовать решатели ode23, ode113 .
Пример 3. Уравнение Ван-дер-Поля.

Для решения дифференциального уравнения 2-го порядка сначала приведем его к системе дифференциальных уравнений 1-го порядка:

где 
% Создаем М-функцию под именем van33.m
%Создаем М-сценарий под именем ddd45_33
plot(t,X),grid,title(‘ Ур-е Ван-дер-Поля ‘ ), legend(‘X1′,’X2’)
% Изменить интервал интегрирования
% Изменить начальные условия ( только все нулевые не должны быть)
% Изменить множитель в уравнении (вместо 2)
% Вывести графические результаты с различным начертанием координат
% Использовать решатели ode23, ode113 .
Пример 4. Интегрирование дифференциальных уравнений с выводом результатов в заданн ом диапазоне точек независимого переменного. Видоизменим пример 2 в сценарии задания интервала интегрирования.
% Сценарий решения примера 4
T=[0:1:6,7:2:18]; % от 0 до 6 шаг 1, от 7 до 18 шаг 2
Пример 5. Интегрирование дифференциальных уравнений с выводом результатов в заданных точках независимого переменного. Видоизменим пример 2 в сценарии задания интервала интегрирования.
% Сценарий решения примера 5
T=[0 0.5 1 1.5 3 4 8]; 7 точек переменного t
Задание к примерам 1-5: произвести графический вывод координат каждой в отдельности
Пример 6. Интегрирование систем линейных дифференциальных уравнений в матричном виде, т.е.
 (6.1)
(6.1)
где  — вектор переменных состояния размера n ´ 1,
— вектор переменных состояния размера n ´ 1,  — вектор входного воздействия размера rx1,
— вектор входного воздействия размера rx1,  — матрицы чисел размера n ´ n, n ´ r, соответственно .
— матрицы чисел размера n ´ n, n ´ r, соответственно .
% Матрицы  и
и  берем из примера 2
берем из примера 2
% Создаем М-функцию под именем syst36.m
A=[-3,0,0;1,-2,0;0,4,-1]; % Матрица А размера 3 ´ 3
B=[10 0 0;0 0 0;0 0 0]; % Матрица B размера 3 ´ 3
u=[1;1;1]; % Входное воздействие размера 3 ´ 1
ds36=A*x+B*u; % Описание правой части матричного дифференциального уравнения (6.1)
% Создаем М-сценарий под именем ddd45_36
% Сценарий решения примера 3.6
plot(t,x),grid,title(‘ Система ур-й 3-го порядка ‘),
Задание к примеру 6:
% Решить систему с двумя воздействиями, с одним воздействием
% Вывести графические результаты с различным начертанием координат
% Вывести графические результаты с по отдельным координатам
% Создать программу решения системы дифференциальных уравнений 4-го порядка
% Использовать решатели ode23, ode113 .
Решение обыкновенных дифференциальных уравнений
с заданной точностью и с параметрами.
Решатели дифференциальных уравнений по умолчанию производят численное интегрирование с относительной погрешностью  и вектором абсолютной погрешности со значением
и вектором абсолютной погрешности со значением  по всем компонентам вектора.
по всем компонентам вектора.
1. Установление заданной относительной погрешности RelTol — ODESET( odeset) .
С помощью установления относительной погрешности RelTol контролируется количество «правильных» цифр в решении дифференциального уравнения в соответствии с общей записью  , где показатель степени P есть число контролируемых цифр в решении.
, где показатель степени P есть число контролируемых цифр в решении.
Пример1. Уравнение Ван-дер-Поля с заданной относительной погрешностью.
С помощью функции ODESET задаются опции решателя дифуравнений с помощью соответствующих строковых символов, которых всего может быть 18. Перечень строковых символов функции ODESET можно просмотреть из командной строки, набрав в ней ODESET
% Сформируем М-функцию для описания правых частей дифференциальных уравнений
% Сохрани ть под именем van33
% Создадим М-сценарий решения на основе ode23 и с относительной погрешностью, равной
% d1= 0.1 и d2=0.0001
% М-сценарий сохранить под именем ret71.
% Формат записи функции odeset включает строковый служебный символ RelTol и задаваемую %величину относительной погрешности (0.1 для d1 и 0.2 для d2).
% d1 и d2 подставляются в соответствующие решатели ( ode23).
Задание к примеру 1:
— выполнить с ode45, ode113;
— изменить коэффициент в М-функции van33 : 0.3, 2.3;
— изменить для d1 относительную погрешность: 1, 0.5, 0.1, 0.01, 0.001, 0.0001 (для ode23).
Пример 2. Анализ нелинейной тест-системы с задаваемой относительной погрешностью вычислений в решателях MATLAB.

где  — постоянные действительные числа.
— постоянные действительные числа.
2.1. Проинтегрируем тест-систему с коэффициентами  и с относительной погрешностью, равной 0.1, 0.01, 0.001, 0.4, 0.3, 0.2
и с относительной погрешностью, равной 0.1, 0.01, 0.001, 0.4, 0.3, 0.2
% Создадим М-функцию под именем dif21
% Создадим М-сценарий под именем syst21
% Введем относительную погрешность 0.1
% В сценарии применим функцию odeset
% Проанализировать тест-систему по 2-й и 3-й координатам.
% Для графического вывода результатов по 2-й координате следует ввести plot в виде
%% Для графического вывода результатов по 3-й координате следует ввести plot в виде
% Проанализировать тест-систему с относительной погрешностью, равной 0.01, 0.4, 0.3, 0.2
% Проанализировать тест-систему с помощью решателей ode45, ode113 , сравнить результаты.
2. Задание абсолютной погрешности — AbsTol .
Абсолютная погрешность AbsTol контролирует разницу между ожидаемым решением и его действительным значением. AbsTol начинает проявляться, когда компонента (координата) решения становится неожидаемо большой. Влияние AbsTol зависит также от интервала и масштаба интегрирования. По умолчанию решатели дифференциальных уравнений Matlab устанавливают величину абсолютной погрешности, равную  .
.
Пример3. Уравнение Ван-дер-Поля с заданной абсолютной погрешностью — ‘AbsTol’ .
% Используем имеющую М-функцию описания уравнения Ван-дер-Поля — van33
% Создадим М-сценарий ( присвоить имя) с задаваемой абсолютной погрешностью по всем координатам и по %одной из возможных
a1=odeset(‘AbsTol’,0.5); % Скаляр 0.1 по всем координатам
% Задание избирательной абсолютной погрешности осуществляется с помощью вектора в виде :
% По первой координате погрешность равна 0.5, по 2-й — 0.000001
% В целом сценарий (присвоить имя) должен иметь вид
% Поскольку система уравнений Ван-дер-Поля имеет взаимозависимые координаты, то интегрирование осуществляется практически с наименьшей погрешностью, т.е. с 0.000001
Задание к примеру 3.
— Применить скаляр абсолютной погрешности: 0.3, 0.1, 0.01.
— Вывести график по 2-й координате.
3. Интегрирование дифференциальных уравнений с параметрами.
Пример 4. Проинтегрировать однородную систему нелинейных дифференциальных уравнений с четырьмя параметрами k1, k2, k3, a:

при следующих начальных условиях: 
Целью является анализ решений при различных параметрах, входящих в систему.
% Создадим М-функцию под именем dif44 с ключевым словом flag
switch flag % Начало процедуры описания правых частей дифуравнений
case » % Состояние flag с опциями по умолчанию
end % Окончание описания правых частей дифуравнений с опциями по умолчанию
% Создадим М-сценарий под именем syst44 для решателя ode23 c опциями по умолчанию
% и введения параметров
x0=[0;1;-1]; % Вектор начальных условий
tt=[0,25]; % Интервал интегрирования
k1=input(‘k1=’)%2.333; % Можно также k1=2.333;
k2=input(‘k2=’)%-0.7789; % Можно также k2=-0.7789;
k3=input(‘k3=’)%-0.7888; % Можно также k3=-0.7888;
a=input(‘a=’)%-0.1; % Можно также a=-0.1;
plot(t,x),grid,title(‘ Система с параметрами ‘), legend( ‘x1’ , ‘x2’ , ‘x3’ )
% В записи функции ode23 символ [ ] указывает на опции ( RelTol, AbsTol и др.), принятые по %умолчанию
Задание к примеру 4.
— Изменить параметр k1: 2, 1, 0.5, 0.2; ( остальные исходные) ;
— Изменить параметр k2: -0.111, -0.333,-0.555,0.7789 ( остальные исходные) ;
— Изменить параметр k3: -1.333, -0.333, -0.666, 0.7888 ( остальные исходные) ;
— Изменить параметр a: -1, 1, 0, 0.5 ( остальные исходные) ;
Произвести интегрирование системы при:
Пример 5. Интегрирование систем с циклическим изменением параметра.
% Используем М-функцию dif55
% Видоизменим М-сценарий syst66 так, чтобы программно изменялся какой-либо параметр (например, k3) и происходило наложение графиков решения по заданной координате (например, по  ). Новый М-сценарий будет с именем syst77.
). Новый М-сценарий будет с именем syst77.
if i==-0.51 % Двойное равенство соответствует логической истине
plot(t,x(:,2),’r’),title(‘ Система с циклическим параметром ‘ )
k3=i; % Без точки с запятой (;) выводятся значения k3
Задание к примеру 5.
— Расширить диапазон изменения параметра k3;
— Написать программу с изменением параметра k2 ;
— Написать программу с графическим выводом всех координат системы при k3=0.51 и только координаты при остальных значениях параметра k3 .