Установившимся горизонтальным полетом вертолета называется прямолинейный полет с постоянной скоростью без набора высоты и без снижения.
Рис. 2.9. Схема сил в горизонтальном полете
Режим горизонтального полета является одним из основных режимов, так как он обычно занимает наибольшую часть времени полета (рис. 2.9).
Для выполнения горизонтального полета суммарная тяга обоих винтов ручкой ППУ через автоматы перекоса отклоняется вперед. Вслед за этим из-за увеличения пикирующего момента вертолет будет уменьшать угол тангажа, который зависит от скорости полета и центровки. С нарастанием скорости полета появляются завалы конусов вращения несущих винтов назад и в стороны, а также возрастает вредное сопротивление, поэтому горизонтальная составляющая тяги несущих винтов должна увеличиваться перемещением ручки ППУ вперед и увеличением общего шага. В горизонтальном полете на вертолет действуют:
— суммарная тяга ННВ и ВНВ Т=ТИ + ТВ
— вредное сопротивление фюзеляжа Q„p;
— подъемная сила стабилизатора Уст.
Если подъемной силой стабилизатора пренебречь, а суммарную тягу винтов разложить в скоростной системе координат на составляющие Тх и Ту, то для установившегося горизонтального полета:
2 Мх = 0; 2^ = 0; 2^ = 0.
В полете летчик добивается соблюдения указанных условий координированным отклонением органов управления, руководствуясь показаниями приборов и положением вертолета относительно горизонта.
Тяга и мощность в горизонтальном полете
Из схемы сил, действующих на вертолет в горизонтальном полете, потребная тяга несущих винтов определяется по формуле /.;■» -■
Так как Ty — G, Тх
T=Vg2 + Q2dр или Т = G|/*l + (^f)2-
Из формулы видно, что тяга несущих винтов в горизонтальном полете должна быть больше, чем тяга на висении, в
раз, так как несущие винты кроме подъемной
силы должны создавать силу, движущую вертолет в направлении полета.
На основании расчета строятся графики потребных и располагаемых тяг в зависимости от массы вертолета и скорости полета на различных режимах (рис. 2.10). Из графика видно, что полет возможен в том диапазоне скоростей, в котором располагаемая тяга больше потребной.
Потребная для горизонтального полета мощность складывается из индуктивной, профильной и вредной (мощности движения):
■Nn Г. П -Л/ИНД Nпр -|» — Л/до.
По кривым потребных и располагаемых мощностей можно определить характерные скорости полета, которые имеют практическое значение.
Рис. 2.11. Характерные скорости горизонтального полета
Минимальная скорость вертолета на высотах от земли до потолка висения равна нулю. За потолком висения она постепенно увеличивается до экономической скорости, достигая ее на динамическом потолке вертолета. Такое изменение минимальной скорости происходит из-за роста потребной и уменьшения располагаемой мощности. На предельной высоте избыток мощности становится равным нулю. Полет на динамическом потолке теоретически можно выполнять только на одной скорости, равной экономической, поэтому практически длительный полет на динамическом потолке невозможен, так как незначительные отклонения в скорости приведут к потере высоты. Динамический потолок поэтому ограничивается запасом мощности, при котором 1^=0,5 м/с (рис. 2.12).
Изучаемый вертолет может сохранить минимальную скорость, равную нулю, до значительных высот (конкретная высота висения зависит от массы вертолета и атмосферных условий).
Практически минимальная скорость горизонтального полета ограничивается 50 км/ч, так как на меньших скоростях полета не работает указатель скорости. Кроме того,
и. ‘і меньших скоростях появляется тряска, обусловленная переходом работы несущих винтов с режима косого обте-
к. чпня на режим осевого обтекания.
Рис. 2.12. Диапазон допустимых высот и скоростей полета
Экономическая скорость — скорость, для полета на которой требуется минимальная мощность.
На этой скорости с данным запасом горючего достигается наибольшая продолжительность полета, а для полета на заданное время расходуется минимальное количество горючего. С подъемом на высоту истинная экономическая скорость несколько увеличивается (за счет сдвига кривой потребной мощности по касательной к ней из начала координат), а приборная экономическая скорость уменьшается (вследствие приборных поправок и влияния высотного коэффициента д=|//Л^.
Экономическую скорость целесообразно использовать при выполнении операций по поиску и слежению в режиме барражирования, а также при передаче целеуказания, когда необходима наибольшая продолжительность нахождения вертолета в воздухе.
Наивыгоднейшая скорость Кнв — скорость, при полете на которой обеспечивается минимальный километровый расход горючего.
На этой скорости с данным запасом горючего достигается наибольшая дальность полета, а для прохождения заданного расстояния расходуется минимальное количество горючего. С подъемом на высоту до 1000 м истинная наивыгоднейшая скорость практически не меняется. С подъемом на большие высоты наивыгоднейшая скорость уменьшается пропорционально увеличению массы вертолета. Приборная скорость с подъемом на высоту и с увеличением массы уменьшается.
Наивыгоднейшую скорость целесообразно использовать при поиске, когда необходимо обследовать наибольший район, а также при маршрутных перелетах.
Максимальная скорость, которая может быть достигнута при имеющемся запасе мощности, ограничивается в зависимости от высоты полета, полетной массы и атмосферных условий по флаттеру, сближению лопастей, прочности и срыву потока с лопастей несущих винтов. В полете максимально допустимая скорость в зависимости от высоты, полетной массы вертолета и температуры наружного воздуха определяется специальным устройством определения Кцоп, установленные над приборной доской летчика у центральной стойки остекления кабины (рис. 2.13).
Рис. 2-13. Устройство ДЛЯ определения допустимой Умаис
Вибрации типа флаттер. При больших скоростях обтекания у земли лопасти несущих винтов могут получить изгиб — но-крутильный флаттер. Для предотвращения возникновения этого явления в эксплуатации кроме конструктивных мер (наличие противофлаттерных грузов в лопастях, подбор оптимальных оборотов несущих винтов, характеристики регулятора взмаха лопастей и т. д.) вводится ограничение максимальной скорости с 10% запасом по флаттеру.
Признаками возникновения флаттера лопастей несущих винтов являются:
— интенсивная тряска вертолета;
— выпадание лопастей из конусов вращения.
При появлении этих признаков необходимо энергично перевести вертолет в режим набора высоты с одновременным гашением скорости. Произвести посадку на выбранную площадку или на базу. После прекращения колебаний при продолжении полета к району посадки нельзя увеличивать скорость полета более 120 км/ч.
Сближение лопастей. В установившемся горизонтальном полете на воздушной скорости 290 км/ч и комбинированной даче ручки циклического шага и правой педали расстояние между концами лопастей НИВ и ВИВ составляет (440± ±245)’ мм, т. е. условие нссхлостывания лопастей обеспечивается. Однако при превышении максимально допустимых скоростей могут возникнуть условия, при которых сближение лопастей становится недопустимым. Поэтому во всех случаях горизонтального полета максимальная скорость ограничивается 280 км/ч.
Срыв потока. Из аэродинамики крыла известно, что оно обтекается плавно лишь на малых углах атаки—докрити — ческих. При увеличении угла атаки сверх критического наступает срыв потока, в результате которого уменьшается cv, увеличивается сх, уменьшается аэродинамическое качество, аэродинамические силы крыла становятся неустойчивыми. У самолета такое явление наблюдается на малых скоростях полета, когда для сохранения необходимой подъемной силы необходимо увеличивать угол атаки крыла.
В таких же условиях обтекания могут оказаться лопасти несущих винтов, но в отличие от самолета — на больших скоростях полета. Это происходит потому, что с увеличением скорости полета вертолета в азимуте ф=270° из окружных скоростей обтекания лопасти будет вычитаться поступательная скорость полета вертолета. Поэтому подъемная сила в этом азимуте минимальная, что ведет к увеличению скорости взмаха лопасти вниз (рис. 2.14) и увеличению углов атаки на концах лопастей больше критических. Наступает срыв потока. Зона срыва появляется в азимуте ф = 270° на концах лопастей, так как в этом районе наибольшая скорость взмаха вниз.
С увеличением скорости полета и уменьшением частоты вращения несущих винтов зоны срыва будут расширяться.
Рис. 2.14. Образование зон срыва и зон обратного обтекания лопастей на максимальных скоростях полета
Вместе с тем увеличение скорости ведет к расширению ЗОИ обратного обтекания, расположенных на комлевых участках лопастей в тех же азимутах, что и зоны срыва. Зоны срыва и обратного обтекания (рис. 2.15) расположены симметрично: у ВИВ — справа, у IIIIB —слева по полету, следовательно, крена при этом не возникает, но уменьшается тяга винтов, возникает кабрирующий момент за счет завала конусов назад, возрастает вибрация, увеличивается напряжение в элементах конструкции. При глубоком срыве может ухудшиться управляемость вертолета, а также произойти опасное сближение лопастей. Для предотвращения попадания вертолета на опасные режимы введены ограничения максимально допустимой скорости по срыву. Для сохранения постоянного значения подъемной силы лопастей при увеличении высоты полета или при повышении температуры окружающего воздуха необходимо увеличивать шаг несущих винтов для соответствующего увеличения Су. Поэтому максимально допустимые скорости полета с увеличением высоты и температуры уменьшаются, а конкретные их значения определяются с помощью устройства для определения Удоп или по таблицам РЛЭ.
При полете на скоростях, близких к предельным по срыву, не следует допускать падения оборотов несущих винтов менее 87%’.
Признаками срыва потока с лопастей несущих винтов являются:
— тряска вертолета, постоянно нарастающая с ростом скорости;
— энергичное снижение, обусловленное резким ростом потребной мощности;
— повышенный расход ручки ППУ от себя, обусловленный возникновением дополнительного кабрирующего момента.
Для вывода вертолета из режима срыва потока необходимо взятием ручки ППУ на себя уменьшить скорость и плавно уменьшить общий шаг до допустимого предела в зависимости от высоты полета вплоть до авторотации. После прекращения срывных явлений перейти на обычный полет с меньшей скоростью.
Аэродинамические силы, действующие на вертолет
При вращении несущего винта суммарные подъемные силы лопастей создают полную аэродинамическую силу НВ — Rнв, приложенную к центру втулки и направленную по оси конуса НВ. Для горизонтального полета необходимо полную аэродинамическую силу Rнв наклонить вперед для создания пропульсивной силы Ха нв. Также для горизонтального полета необходимо иметь подъемную силу Уа нв для создания вертикальной тяги. Для парирования реактивного момента несущего винта на вертолетах одновинтовой схемы применен рулевой винт, тяга которого Ррв, умноженная на длину хвостовой балки, создает момент рулевого винта. Но сама сила Ррв в горизонтальной плоскости смещает вертолет влево по направлению силы. Чтобы этого не происходило необходимо создавать и боковую силу Zа нв для компенсации тяги рулевого винта, чтобы вертолет не перемещало влево по оси ОУ.

Рулевой винт
Рулевой винт аэродинамически аналогичен несущему винту. Все аэродинамические характеристики, все эволюции работы лопасти РВ (взмахи, качания) аналогичны несущему винту.
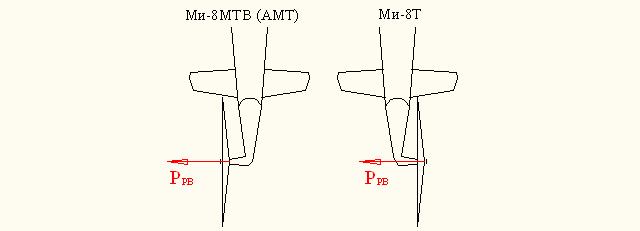
Рулевой винт служит для парирования реактивного момента несущего винта и для путевого управления. Но конструктивно РВ отличается от НВ. На вертолете Ми-8 применена конструкция РВ на карданном подвесе. У лопастей имеется только осевой шарнир для изменения углов установки лопастей РВ. Углы установки изменяются от +21 о (правая педаль на упоре) до -7,5 о (левая педаль на упоре). Отрицательные углы установки лопасти необходимы для режима самовращения НВ, когда несущий винт, вращаясь на режиме самовращения (РСНВ) создает увлекающий момент и для его парирования тягу РВ необходимо направлять в другую сторону, нежели при моторном полете. Карданный подвес лопастей РВ предусматривает жесткое крепление комля лопасти к втулке с небольшим (порядка 1 о ) углом конусности. Таким образом, в отличие от винта классического типа маховые колебания всех лопастей карданного РВ, жестко закрепленного на одном общем корпусе втулки, являются взаимосвязанными. Конусность РВ в плоскости вращения создается в основном изгибом лопастей. На вертолете Ми-8Т рулевой винт расположен справа (по полету) от концевой балки и по воздействию на концевую балку является толкающим. На вертолете Ми-8МТВ (АМТ) рулевой винт находится слева от концевой балки и является тянущим.
Развернув РВ в другую сторону, в отличие от Ми-8Т, получили ряд преимуществ от аэродинамики, не изменяя конструкции несущей системы. Так, на висении лопасти рулевого винта Ми-8Т работают в отступающем потоке, отбрасываемым несущим винтом и Wэф образуется из разности скорости набегающего потока и окружной скорости. На Ми-8МТВ (АМТ) лопасть РВ движется навстречу потоку от несущего винта и Wэф образуется из суммы скоростей набегающего потока и окружной. Так как в формуле создания подъемной силы элемента лопасти подъемная сила зависит от квадрата скорости, то изменив картину обтекания лопасти РВ на Ми-8 МТВ (АМТ) сумели существенно увеличить эффективность РВ, что положительно повлияло на летные характеристики и ограничения на висении и рулении.
АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА ВЕРТОЛЕТА
ВЕРТОЛЕТ МИ-8МТ
 |
ПРАКТИЧЕСКАЯ АЭРОДИНАМИКА
ВВЕДЕНИЕ
Военно-транспортный вертолет Ми-8МТ с двумя турбовальными двигателями ТВ3-117МТ (ВМ) предназначен для перевозки людей и различных грузов в грузовой кабине, а также для транспортировки грузов на внешней подвеске.

Внешний вид вертолета
Вертолет Ми-8МТ применяется в следующих вариантах:
— без дополнительных топливных баков (для перевозки в грузовой кабине грузов общим весом до 4000кг.);
— с одним дополнительным топливным баком;
— с двумя дополнительными топливными баками;
— для транспортировки грузов на внешней подвеске весом до 3000кг.
2. Десантный — для перевозки десантников с личным оружием (24 десантника на МТ, 30 десантников на МТВ-3).
— с носилочными ранеными (максимально 12 чел) в сопровождении медработника;
— комбинированный (максимально 12 чел.-3 носилочных и 17 сидячих раненых или 15 сидячих раненых и один дополнительный топливный бак).
4. С оборудованием ВМР-2.
АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА
ВЕРТОЛЕТА. ОСНОВНЫЕ ТАКТИКО-
ТЕХНИЧЕСКИЕ ДАННЫЕ
ПОНЯТИЕ «АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА»
Под аэродинамической компоновкой летательного аппарата понимают внешние формы и способы сочетания его частей, создающих в полете основные аэродинамические силы и моменты.
Применительно к вертолетам аэродинамическая компоновка характеризуется:
— количеством и расположением несущих винтов;
— формами (обводами) фюзеляжа;
— типом и расположением силовой установки;
— наличием, расположением и формами крыла и оперения;
— количеством и формами выступающих в поток элементов.
Главным и в значительной мере определяющим признаком аэродинамической компоновки вертолета является количество несущих винтов и их расположение.
Военно-транспортный вертолет Ми-8МТ, спроектирован и построен по одновинтовой схеме с рулевым винтом и является дальнейшим развитием вертолета Ми-8.
АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА ВЕРТОЛЕТА
Фюзеляж вертолета. Фюзеляж вертолета является основным силовым корпусом вертолета и представляет собой цельнометаллический полумонокок переменного сечения с гладкой работающей обшивкой (рис.1.1.).

Рис.1.1. Фюзеляж вертолета
Фюзеляж имеет три конструктивных разъема и включает в себя:
— концевую балку с обтекателями.
Носовая часть фюзеляжа представляет собой самостоятельный отсек, в котором размещены кабина экипажа, органы управления вертолетом, приборное и другое оборудование.
В центральной части фюзеляжа расположена грузовая кабина.
Хвостовая балка – клееной конструкции, блочно-стрингерного типа, имеет форму усеченного конуса длиной 5440мм и состоит из каркаса и гладкой работающей обшивки. К хвостовой балке крепится стабилизатор и амортизатор хвостовой опоры.
Концевая балка предназначена для выноса оси вращения рулевого винта в плоскость вращения НВ. Ось килевой балки отклонена вверх на угол 43 0 10 ’ , по отношению к оси хвостовой балки.
Стабилизатор. На вертолете установлен неуправляемый в полете стабилизатор, который служит для улучшения характеристик продольной устойчивости (рис.1.2.).

Основные геометрические данные:
— угол установки относительно оси хвостовой балки:
-6 0 — для вертолета МИ-8МТ;
-3 0 — для вертолета МИ-8МТВ-3;
— площадь стабилизатора – 2,0м 2 .
Стабилизатор имеет симметричный профиль и состоит из правой и левой половин трапециевидной формы в плане.
На режимах установившегося горизонтального полета углы атаки стабилизатора отрицательны и подъемная сила создает кабрирующий момент. Стабилизатор находится в пределах ометаемой площади, поэтому на висении в штиль и при малых скоростях он попадает в поле значительных индуктивных скоростей от НВ. При этом на стабилизаторе возникает направленная вниз сила, которая создает значительный кабрирующий момент.
Несущий винт. Несущий винт предназначен для создания подъемной силы, необходимой для осуществления вертикального набора высоты и поступательного полета вертолета.
Несущий винт состоит из пяти лопастей и втулки (рис.1.3.).

Рис.1.3. Несущий винт
Основные геометрические данные:
— диаметр винта – 21,3м;
— форма лопасти в плане – прямоугольная;
— хорда лопасти – 0,52м;
— ометаемая площадь – 356,1м 2 ;
— коэффициент заполнения – 0,0777;
— коэффициент компенсатора взмаха – 0,5.
Основным силовым элементом лопасти является прессованный из алюминиевого сплава лонжерон, к полкам и задней стенке которого приклеиваются хвостовые отсеки с сотовым заполнителем.
Лопасть имеет геометрическую крутку +5 0 в сечениях 1-4 и далее изменяющуюся по линейному закону до 0 0 на конце лопасти (рис.1.4.). На отсеках 16 и 17 имеются триммерные пластины шириной 40мм, служащие для изменения моментных характеристик лопасти при устранении несоконусности несущего винта (рис.1.5.).

Рис.1.4. Геометрическая крутка лопасти

Рис.1.5. Лопасть несущего винта
Втулка несущего винта предназначена для передачи вращения лопастям от главного редуктора, а также для восприятия и передачи на фюзеляж аэродинамических сил, возникающих на несущем винте.
Схема втулки – пятилопастная, с разнесенными вертикальными, разнесенными и повернутыми горизонтальными и осевыми шарнирами (рис.1.6.).
Благодаря шарнирному сочленению лопастей с корпусом втулки значительно снижаются переменные напряжения на втулке и уменьшаются моменты аэродинамических сил, передающихся от винта на фюзеляж. Втулка снабжена гидравлическими демпферами для гашения колебаний лопастей относительно вертикальных шарниров и имеет компенсатор взмаха.

Рис.1.6. Втулка несущего винта
Рулевой винт — трехлопастной, карданного типа, тянущий, предназначен для уравновешивания реактивного момента несущего винта и для путевого управления вертолетом. Вращение винта осуществляется от главного редуктора через трансмиссию. Рулевой винт состоит из втулки и трех лопастей, и установлен на фланце выходного вала хвостового редуктора (рис.1.7.).

Рис.1.7. Рулевой винт
Направление вращения: по часовой стрелке, если смотреть со стороны рулевого винта. Изменение направления вращения рулевого винта (по сравнению с вертолетом Ми-8Т) привело к повышению эффективности путевого управления, особенно на режимах малых скоростей. Это связано с тем, что увеличилась скорость обтекания лопасти, что привело к уменьшению углов установки лопастей для создания равноценной тяги (рис.1.8.).

Рис.1.8. Треугольники скоростей лопасти РВ
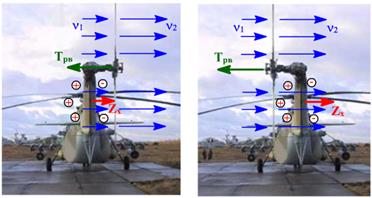
Рис.1.9. Работа толкающего и тянущего РВ
Относительная потеря силы тяги РВ на обдувку киля определяется схемой РВ(толкающий или тянущий), расстоянием  между килем и РВ и обдуваемой площадью киля
между килем и РВ и обдуваемой площадью киля  , Если РВ тянущий, боковая сила киля создается от
, Если РВ тянущий, боковая сила киля создается от
непосредственной обдувки киля индуктивным потоком, отбрасываемым РВ. Если РВ толкающий, индуктивный поток отбрасывается в свободное воздушное пространство, но подсасывается из зоны расположения киля. Поэтому потери тяги толкающего РВ обусловлены, во-первых, силой разряжения на киле и прилегающей части хвостовой балки, а во-вторых, аэродинамическим затенением винта килем. Для любого типа РВ присутствие киля всегда вызывает потерю силы тяги, не компенсируемую незначительным экранным эффектом или оптимальным профилированием киля.
В конечном счете, потеря силы тяги РВ зависит от зазора между плоскостью вращения РВ и килем  , а также от значений обдуваемой площади киля
, а также от значений обдуваемой площади киля  (рис.1.10.). Для толкающего РВ величина
(рис.1.10.). Для толкающего РВ величина  по мере приближения РВ к килю возрастает значительно интенсивнее, чем для тянущего, однако в практической реализуемом диапазоне значений 0,3 0 50 ‘. +45 ‘ 20 0 30 ‘. +20 ‘ 16 0 20 ‘
по мере приближения РВ к килю возрастает значительно интенсивнее, чем для тянущего, однако в практической реализуемом диапазоне значений 0,3 0 50 ‘. +45 ‘ 20 0 30 ‘. +20 ‘ 16 0 20 ‘
В систему путевого управления включена система подвижных упоров управления СПУУ-52-1. Она предназначена для автоматического изменения положения упора, ограничивающего максимальную величину угла установки лопастей РВ в зависимости от плотности воздуха с целью предохранения винта и трансмиссии от перегрузки. При увеличении плотности воздуха максимальный угол установки лопастей РВ уменьшается, а при уменьшении плотности воздуха – увеличивается.
Взлетно-посадочные устройства. Взлетно-посадочные устройства предназначены для восприятия ударных нагрузок при посадке вертолета, а также для перемещения вертолета по земле при рулении и взлете. К взлетно-посадочным устройствам относятся (рис.1.11.):
— колесное шасси, не убирающееся в полете, оборудованное двумя главными стойками и передней стойкой с двумя спаренными колесами;
— хвостовая опора, предназначенная для предохранения лопастей РВ от повреждений при посадке вертолета с большим углом тангажа.

Рис.1.11. Взлетно-посадочные устройства вертолета