Для численного интегрирования системы нелинейных уравнений движения необходимо использовать итерационные методы в методах прямого интегрирования. Наиболее часто используемым методом прямого численного интегрирования являются метод Ньюмарка (метод линейного ускорения).
Рассмотрим прямое интегрирование уравнений движения методом Ньюмарка с использованием итерационной процедуры модифицированного метода Ньютона-Рафсона. Для конечноэлементной системы в целом в момент времени

Необходимо определить узловые перемещения, скорости и ускорения, момент времени t+∆t, для которых также должно выполнятся равенство

Вычтя (2.75) из (2.76) и разложив полученное выражение в ряд Тейлора получим уравнение движения в приращениях, полагая ∆tмалым и пренебрегая слагаемыми со степенями ∆ 2 и выше

По сути, выражение (2.79) представляет собой линеаризованное в момент времени t+∆tуравнение движения геометрически нелинейной системы (2.76). Благодаря аналогии с уравнением движения линейной системы, решение для приращений перемещений, скоростей и ускорений в (2.79) для момента t+∆t может быть получено с помощью методов прямого интегрирования, используемых для интегрирования линейных систем. Так в работе [357] при численном интегрировании нелинейных уравнений для аппроксимации ускорений и скоростей были использованы формулы линейного метода Ньюмарка (метода среднего ускорения).

где а и β- параметры метода Ньюмарка.
Согласно методу Ньюмарка векторы узловых скоростей и узловых ускорений в момент времени t+Δ∕ определяются по формулам

Подставив (2.81) в уравнения движения (2.79) после преобразований получим

где эффективная матрица жесткости и вектор эффективной нагрузки имеют вид

Получив решение уравнения (2.82) можно вычислить узловые перемещения в момент времени /+Δ/

Полученное решение линеаризованного уравнения движения (2.79) при его подстановке в нелинейное уравнение (2.76) не будет обращать его в равенство. При этом появится вектор сил невязки ∆ уравнения (2.76) вида

Очевидно, что решением уравнения (2.76) будут те узловые перемещения, скорости и ускорения, при которых вектор сил невязки в (2.86) обращается в ноль. Для получения нужного решения с заданной погрешностью необходимо использовать итерационные методы. Наиболее эффективным с вычислительной точки зрения является модифицированный метод Ньютона-Рафсона [238,239].
Прямое численное интегрирование нелинейных уравнений движения предлагается производить неявным методом Ньюмарка в сочетании с итерационным модифицированным методом Ньютона-Рафсона [66, 238, 239]. Начальные приближения значений ускорений, скоростей и приращений на первой итерации 123
вычисляются из (2.82) и (2.81).
Приведем алгоритм методики прямого численного интегрирования уравнений движения геометрически нелинейной системы:
1) . Предполагаем, что для момента времени / известны начальные условия
 удовлетворяющие уравнению равновесия (2.75).
удовлетворяющие уравнению равновесия (2.75).
2) . Вычислим матрицу касательной жесткости и вектор
и вектор
упругих сил системы 
3) . Используя аппроксимации метода Ньюмарка для момента времени /+Δ/ по формулам (2.83) и (2.84) вычислим эффективную матрицу жесткости 
и вектор эффективной нагрузки . Из решения уравнения (2.82) получим начальное значение приращений перемещений
. Из решения уравнения (2.82) получим начальное значение приращений перемещений (верхний индекс
(верхний индекс
обозначает номер итерации по методу Ньютона-Рафсона).
4) . Из (2.85) получим узловые перемещения Используя выражение
Используя выражение
(2.81) получим узловые скорости и ускорения
и ускорения 
вектор невязки ∆* и если он удовлетворяет условию сходимости, то начинаем новый шаг во времени и переходим к шагу № 2.
и переходим к шагу № 2.
6) . Если условие сходимости не удовлетворено, то вычисляем корректирующую поправку приращений перемещений ∆ a по формуле

где — эффективная матрица жесткости, вычисленная на шаге № 3. Используя поправку, корректируем приращения перемещений по формуле
— эффективная матрица жесткости, вычисленная на шаге № 3. Используя поправку, корректируем приращения перемещений по формуле

7) . Переходим к следующей итерации для момента времени /+Δ/ — шаг алгоритма № 4.
Итерации для момента времени /+Δ/ (шаги алгоритма с №№ 4 по 7) повто- 124
ряются до тех пор, пока условия сходимости не будут удовлетворены (шаг № 5). Подобная итерационная схема называется модифицированным методом Ньютона-Рафсона [238, 239], поскольку эффективная матрица жесткости в выражении (2.87) вычисляется только один раз на начальной итерации и остается постоянной на всем временном шаге. Это приводит к снижению вычислительных затрат (треугольное разложение матрицы также делается лишь один раз), но приводит к линейной скорости сходимости итерационной схемы, по сравнению с квадратичной скоростью сходимости полного метода Ньютона-Рафсона.
Аналогичная неявная методика численного интегрирования может быть получена с использованием аппроксимирующих формул 0-метода Вилсона. Основным отличием методики на основе 0-метода Вилсона является то, что в ней ищется решение, удовлетворяющее уравнениям равновесия не в момент времени t+∆t, а в момент времени ∕+θ∆t, где θ> 1 — параметр метода Вилсона.
Представленный выше алгоритм в случае методики на основе 0-метода Вилсона изменится следующим образом:
• Все индексы переменных, связанные с t+∆tменяются на t + θ∆t.
• Аппроксимирующие формулы (2.81) заменяются следующими

• Константы интегрирования а0. ,а& вычисляются по формулам

• Когда итерационный процесс сошелся к значениям приращений перемещений , удовлетворяющим
, удовлетворяющим
уравнения динамического равновесия в момент времени с заданной
с заданной
погрешностью (шаг №5), то после этого вычисляются те же вектора для момента времени t+∆tпри помощи следующих выражений

Было проведено исследование точности предлагаемой методики динамического 125
анализа в зависимости от параметров интегрирования, временного шага Δ/, степени нелинейности, вида нелинейной упругой характеристики («жесткой», «мягкой») , величины и характера возмущающей силы. Полученные результаты указывают на хорошую точность и работоспособность исследуемых методик численного интегрирования нелинейных уравнений движения, причем методика на основе метода Ньюмарка более точна и требует меньших вычислительных затрат, т.к. не требует дополнительного пересчета решения для момента времени t + Δ t.
- Интегрирование уравнений движения
- Интегрирование уравнений движения
- Численное интегрирование
- Явный метод Эйлера
- Почему явный метод Эйлера не (всегда) так уж хорош
- Симплектический метод Эйлера
- Существует множество других методов интегрирования
- Реализация RK4
- Сравнение симплектического метода Эйлера и RK4
- Заключение
Интегрирование уравнений движения
Симуляция физики делает небольшие предсказания на основании законов физики. Эти предсказания на самом деле достаточно просты, что-то вроде «если объект вот здесь и он движется с такой скоростью в этом направлении, то за краткий промежуток времени он окажется вот тут». Мы создаём такие предсказания с помощью математической техники под названием интегрирование.
Темой этой статьи как раз и будет реализация такого интегрирования.
Интегрирование уравнений движения
Вы можете помнить из курса старшей школы или вуза, что сила равна произведению массы на ускорение.

Преобразуем это уравнение и увидим, что ускорение равно силе, делённой на массу. Это соответствует нашим интуитивным ожиданиям, потому что тяжёлые объекты труднее бросать.

Ускорение — это темп изменения скорости от времени:

Аналогично, скорость — это темп изменения позиции от времени:

Это значит, что если мы знаем текущие позицию и скорость объекта, а также приложенные к нему силы, то сможем проинтегрировать, чтобы найти его позицию и скорость в определённый момент времени.
Численное интегрирование
Если вы не изучали дифференциальные уравнения в вузе, то можете вздохнуть спокойно — вы почти в такой же ситуации, что и те, кто их изучал, потому что мы не будем решать дифференциальные уравнения аналитически. Вместо этого мы будем искать решение численным интегрированием.
Вот как работает численное интегрирование: во-первых, начнём с исходной позиции и скорости, затем сделаем небольшой шаг вперёд, чтобы найти скорость и позицию в будущем. Затем повторим это, двигаясь вперёд небольшими шагами, используя результат предыдущих вычислений как исходную точку следующих.
Но как нам найти изменение скорости и позиции на каждом шаге?
Ответ лежит в уравнениях движения.
Давайте назовём наше текущее время t, а шаг времени dt или «delta time».
Теперь мы можем представить уравнения движения в понятном всем виде:
Интуитивно это понятно: если вы находитесь в автомобиле, движущемся со скоростью 60 км/ч, то за один час вы проедете 60 км. Аналогично, автомобиль, ускоряющийся на 10 км/ч в секунду, через 10 секунд будет двигаться на 100 км/ч быстрее.
Разумеется, эта логика сохраняется, только когда ускорение и скорость постоянны. Но даже если они меняются, то это для начала вполне неплохая аппроксимация.
Давайте представим это в коде. Начнём с стационарного объекта массой один килограмм и приложим к нему постоянную силу в 10 кН (килоньютонов) и сделаем шаг вперёд, принимая, что один временной шаг равен одной секунде:
Вот каким будет результат:
Как вы видите, на каждом шаге мы знаем и позицию, и скорость объекта. Это и есть численное интегрирование.
Явный метод Эйлера
Вид интегрирования, который мы только что использовали, называется явным методом Эйлера.
Он назван в честь швейцарского математика Леонарда Эйлера, впервые открывшего эту технику.
Интегрирование Эйлера — это простейшая техника численного интегрирования. Она точна на 100% только когда темп изменений в течение шага времени постоянен.
Поскольку в примере выше ускорение постоянно, интегрирование скорости выполняется без ошибок. Однако мы ещё интегрируем и скорость для получения позиции, а скорость увеличивается из-за ускорения. Это значит, что в проинтегрированной позиции возникает ошибка.
Но насколько велика эта ошибка? Давайте выясним!
Существует аналитическое решение движения объекта при постоянном ускорении. Мы можем использовать его, чтобы сравнить численно интегрированную позицию с точным результатом:
Через 10 секунд объект должен был переместиться на 500 метров, но явным метод Эйлера даёт нам результат 450. То есть погрешность в целых 50 метров всего за 10 секунд!
Кажется, что это невероятно плохо, но в играх обычно для шага физики берётся не такой большой временной интервал. На самом деле, физика обычно вычисляется с частотой, примерно равной частоте кадров дисплея.
Если задать шаг dt = 1 ⁄100, то мы получим гораздо лучший результат:
Как вы видите, это достаточно хороший результат, определённо вполне достаточный для игры.
Почему явный метод Эйлера не (всегда) так уж хорош
С достаточно малым шагом времени явный метод Эйлера при постоянном ускорении даёт вполне достойные результаты, но что будет, если ускорение не постоянно?
Хорошим примером переменного ускорения является система пружинного амортизатора.
В этой системе масса присоединена к пружине, и её движение гасится чем-то вроде трения. Существует сила, пропорциональная расстоянию до объекта, которая притягивает его к исходной точке, и сила, пропорциональная скорости объекта, но направленная в противоположном направлении, которая замедляет его.
Здесь ускорение в течение шага времени совершенно точно изменяется, но эта постоянно меняющаяся функция является сочетанием позиции и скорости, которые сами постоянно изменяются за шаг времени.
Вот пример гармонического осциллятора с затуханием. Это хорошо изученная задача, и для него существует аналитическое решение, которое можно использовать для проверки результата численного интегрирования.
Давайте начнём со слабозатухающей системы, в которой масса колеблется рядом с исходной точкой, постепенно замедляясь.
Вот входные параметры системы масса-пружина:
- Масса: 1 килограмм
- Исходная позиция: 1000 метров от исходной точки
- Коэффициент упругости по закону Гука: k = 15
- Коэффициент затухания по закону Гука: b = 0.1
И вот график точного решения:

Если для интегрирования этой системы мы применим явный метод Эйлера, то получим следующий результа, который я отмасштабировал по вертикали:
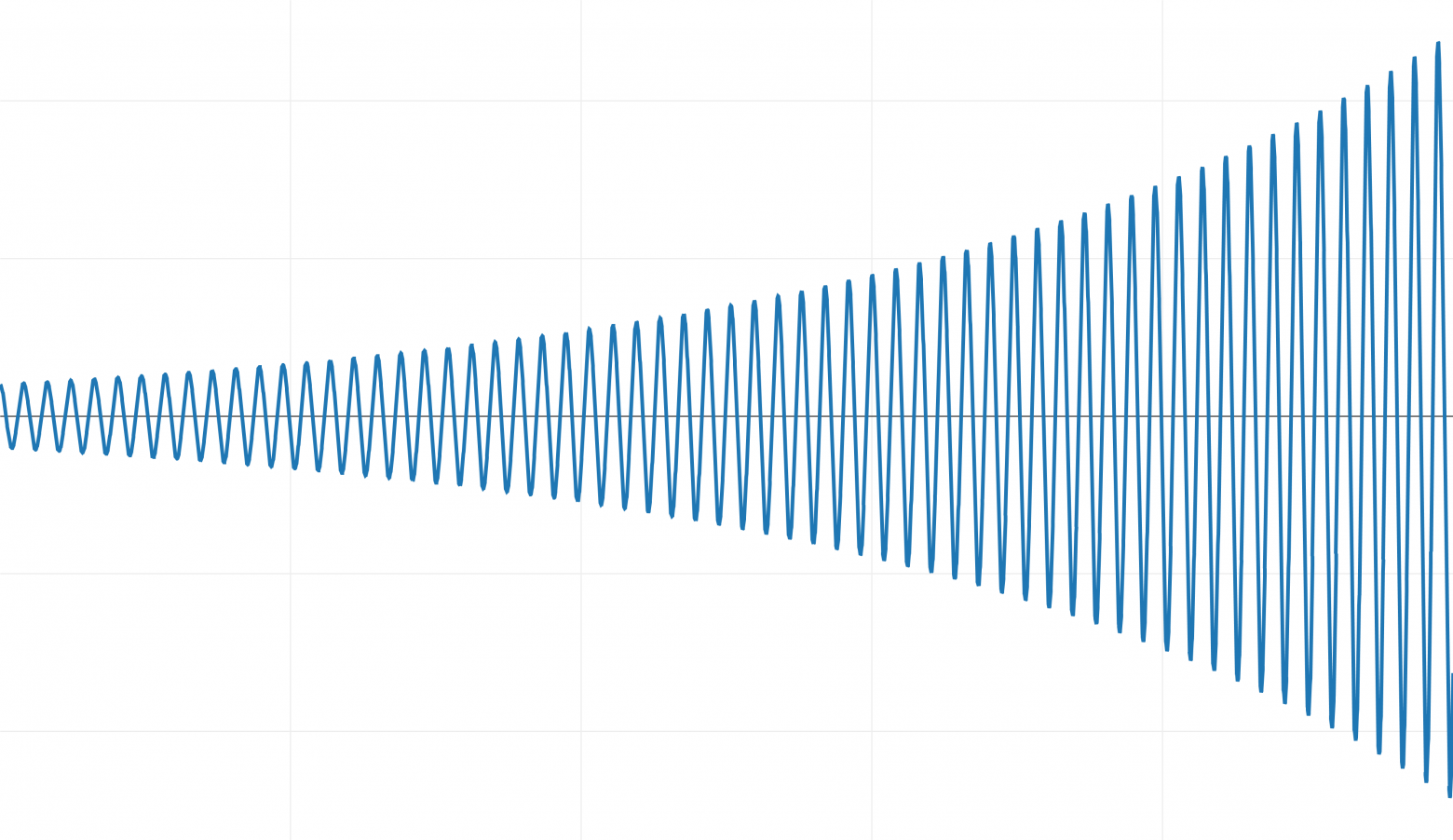
Вместо затухания и сближения с исходной точкой, система со временем набирает энергию!
При интегрировании явным методом Эйлера и с dt= 1 ⁄100 такая система нестабильна.
К сожалению, поскольку мы уже интегрируем с малым шагом времени, то не имеем практичных способов повышения точности. Даже если мы уменьшим шаг времени, то всегда будет коэффициент упругости k, при котором мы получим такое поведение.
Симплектический метод Эйлера
Мы можем рассмотреть ещё один интегратор — симплектический метод Эйлера.
В большинстве коммерческих игровых физических движков используется этот интегратор.
Переход от явного к симплектическому методу Эйлера заключается только в замене:
Использование симплектического интегратора Эйлера при dt = 1 ⁄100 для системы пружинного амортизатора даёт стабильный результат, очень близкий к точному решению:
Даже несмотря на то, что симплектический метод Эйлера имеет ту же степень точности, что и явный метод (степень 1), при интегрировании уравнений движения мы получаем намного лучший результат, потому что оно является симплектическим.
Существует множество других методов интегрирования
И теперь нечто совершенно другое.
Неявный метод Эйлера — это способ интегрирования, хорошо подходящий для интегрирования жёстких уравнений, которые при других методах становятся нестабильными. Его недостаток заключается в том, что он требует решения системы уравнений на каждом шаге времени.
Интегрирование Верле обеспечивает бо́льшую точность, чем неявный метод Эйлера, и требует меньше памяти при симуляции большого числа частиц. Это интегратор второй степени, который тоже является симплектическим.
Существует целое семейство интеграторов, называемое методами Рунге-Кутты. На самом деле, явный метод Эйлера считается частью этого семейства, но в него входят интеграторы и более высокого порядка, самым классическим из которых является метод Рунге-Кутты порядка 4 (Runge Kutta order 4) или просто RK4.
Это семейство интеграторов названо в честь открывших их немецких физиков: Карла Рунге и Мартина Кутты.
RK4 — это интегратор четвёртого порядка, то есть накапливаемая ошибка имеет порядок четвёртой производной. Это делает метод очень точным, гораздо более точным, чем явный и неявный методы Эйлера, имеющие только первый порядок.
Но хотя он более точен, нельзя сказать, что RK4 автоматически становится «лучшим» интегратором, или даже что он лучше симплектического метода Эйлера. Всё гораздо сложнее. Тем не менее, это довольно интересный интегратор и его стоит изучить.
Реализация RK4
Существует уже много объяснений математики, используемой в RK4. Например: здесь, здесь и здесь. Я настоятельно рекомендую изучить его выведение и понять, как и почему он работает на математическом уровне. Но я понимаю, что целевая аудитория этой статьи — программисты, а не математики, поэтому мы здесь будем рассматривать только реализацию. Так что давайте приступим.
Прежде чем приступить, давайте зададим состояние объекта как struct в C++, чтобы можно было удобно хранить позицию и скорость в одном месте:
Также нам нужна структура для хранения производных значений состояний:
Теперь нам нужна функция для вычисления состояния физики из t в t+dt с помощью одного набора производных, а после этого для вычисления производных в новом состоянии:
Функция ускорения управляет всей симуляцией. Давайте используем её в системе пружинного амортизатора и вернём ускорение для единичной массы:
То, что нужно здесь записать, разумеется, зависит от симуляции, но необходимо структурировать симуляцию таким образом, чтобы можно было вычислять ускорение внутри этого метода для заданных состояния и времени, в противном случае он не подойдёт для интегратора RK4.
Наконец, мы получаем саму процедуру интегрирования:
Интегратор RK4 делает выборку производной в четырёх точках, чтобы определить кривизну. Заметьте, как производная a используется при вычислении b, b используется при вычислении c, и c для d. Эта передача текущей производной в вычисление следующей и даёт интегратору RK4 его точность.
Важно то, что каждая из этих производных a, b, c и d будет разной, когда темп изменения в этих величинах является функцией времени или функцией самого состояния. Например, в нашей системе пружинного амортизатора ускорение является функцией текущей позиции и скорости, которые меняются в шаге времени.
После вычисления четырёх производных наилучшая общая производная вычисляется как взвешенная сумма, полученная из разложения в ряд Тейлора. Эта комбинированная производная используется для перемещения позиции и скорости вперёд во времени, точно так же, как мы делали это в явном интеграторе Эйлера.
Сравнение симплектического метода Эйлера и RK4
Давайте подвергнем проверке интегратор RK4.
Очевидно, что поскольку он является интегратором более высокого порядка (четвёртый против первого) он наглядно будет более точен, чем симплектический метод Эйлера, правда?
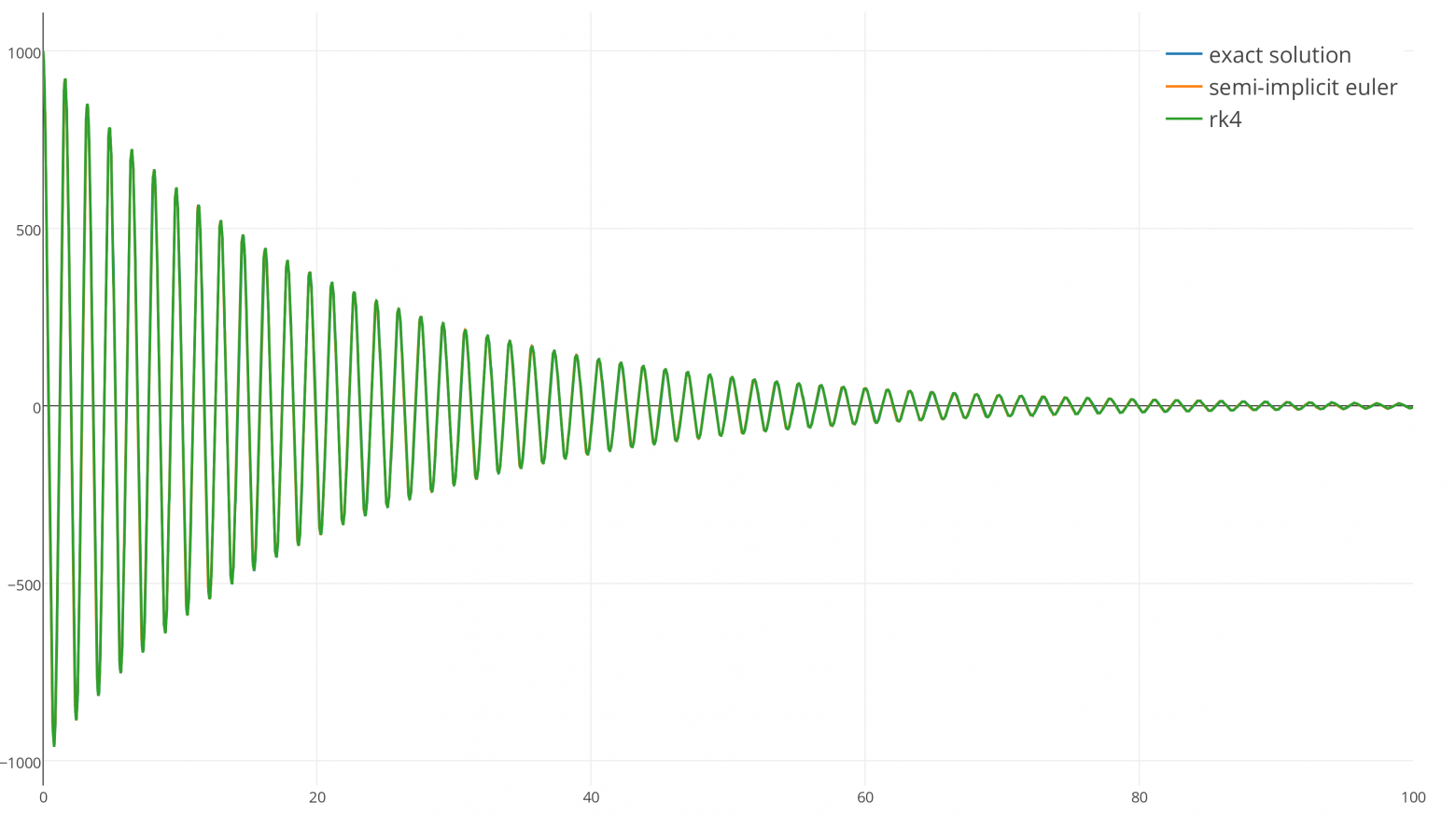
Неправда. Оба интегратора так близки к точному результату, что при таком масштабе почти невозможно найти между ними разницу. Оба интегратора стабильны и очень хорошо повторяют точное решение при dt= 1 ⁄100.
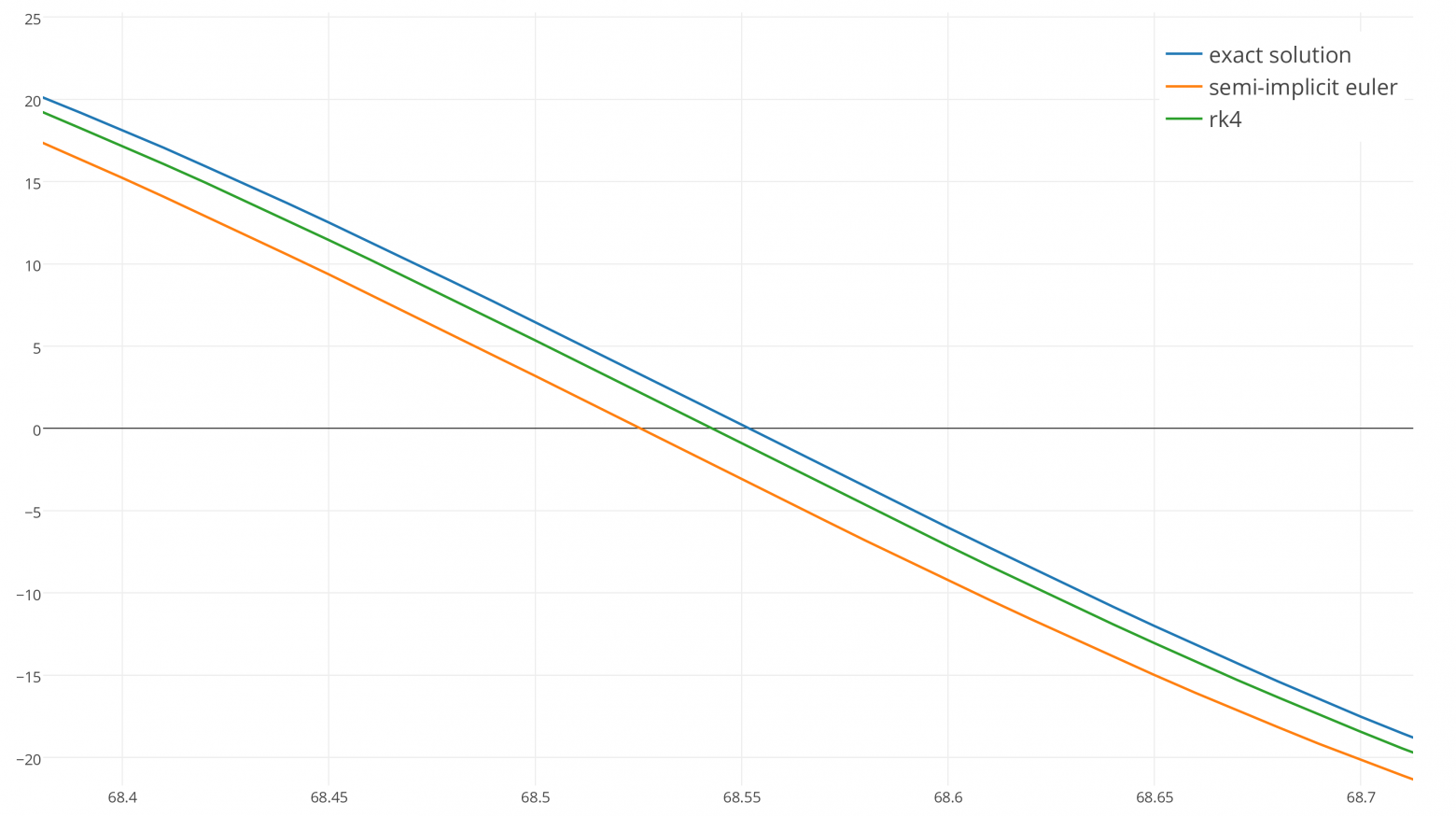
При увеличении видно, что RK4 действительно более точен, чем симплектический метод Эйлера, но стоит ли эта точность сложности и лишнего времени выполнения RK4? Трудно судить.
Давайте постараемся и посмотрим, сможем ли мы найти значительное различие между двумя интеграторами. К сожалению, мы не сможем долго наблюдать за этой системой, потому что она быстро затухает до нуля, поэтому давайте перейдём к простому гармоническому осциллятору, который колеблется бесконечно и без затуханий.
Вот точный результат, к которому мы будем стремиться:

Чтобы усложнить интеграторам задачу, давайте увеличим шаг времени до 0,1 секунды.
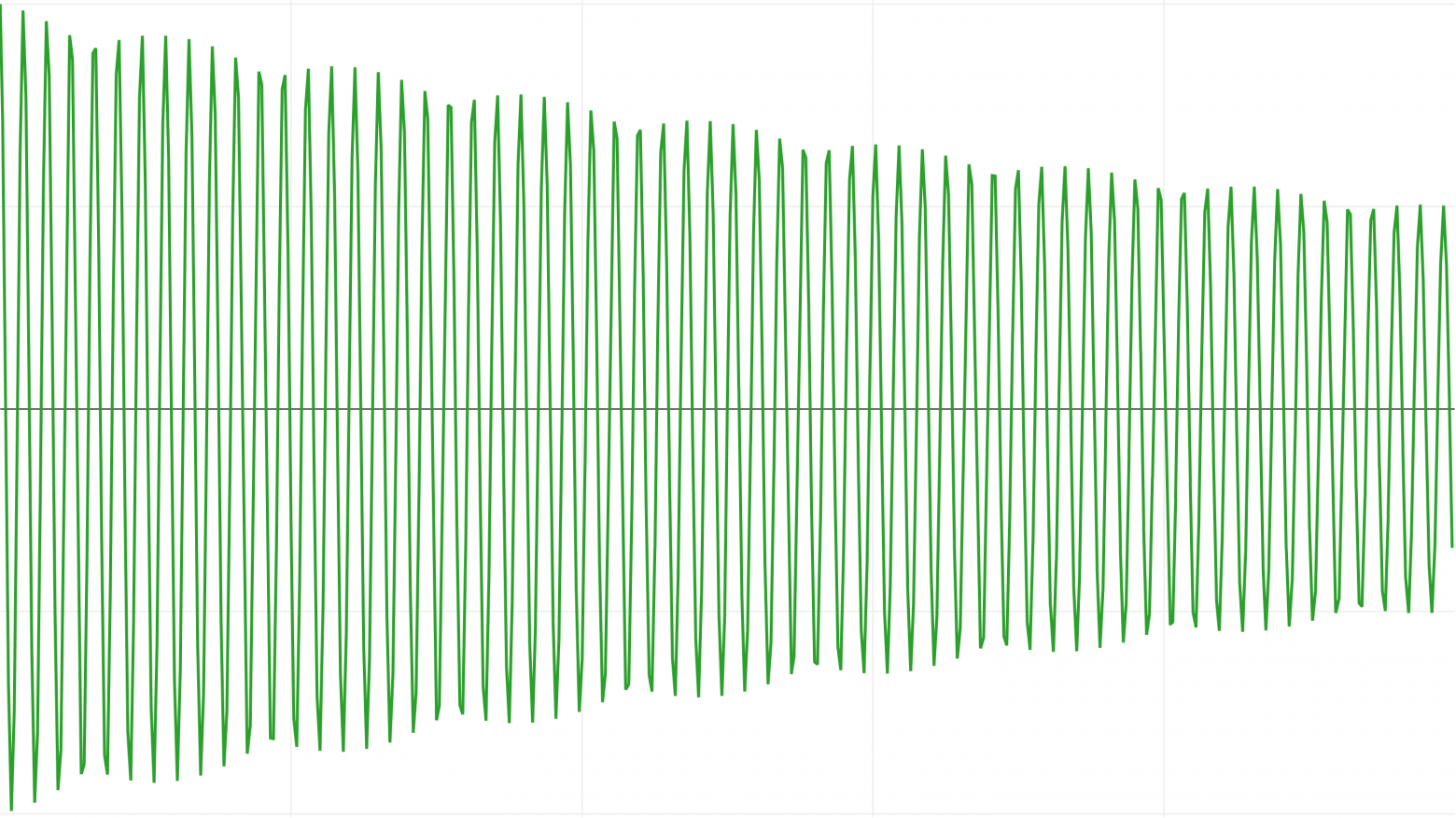
Теперь запустим интеграторы на 90 секунд и увеличим масштаб:
Через 90 секунд симплектический метод Эйлера (оранжевая кривая) сдвинулся по фазе относительно точного решения, потому что его частота немного отличалась, в то время как зелёная кривая RK4 соответствует частоте, но теряет энергию!
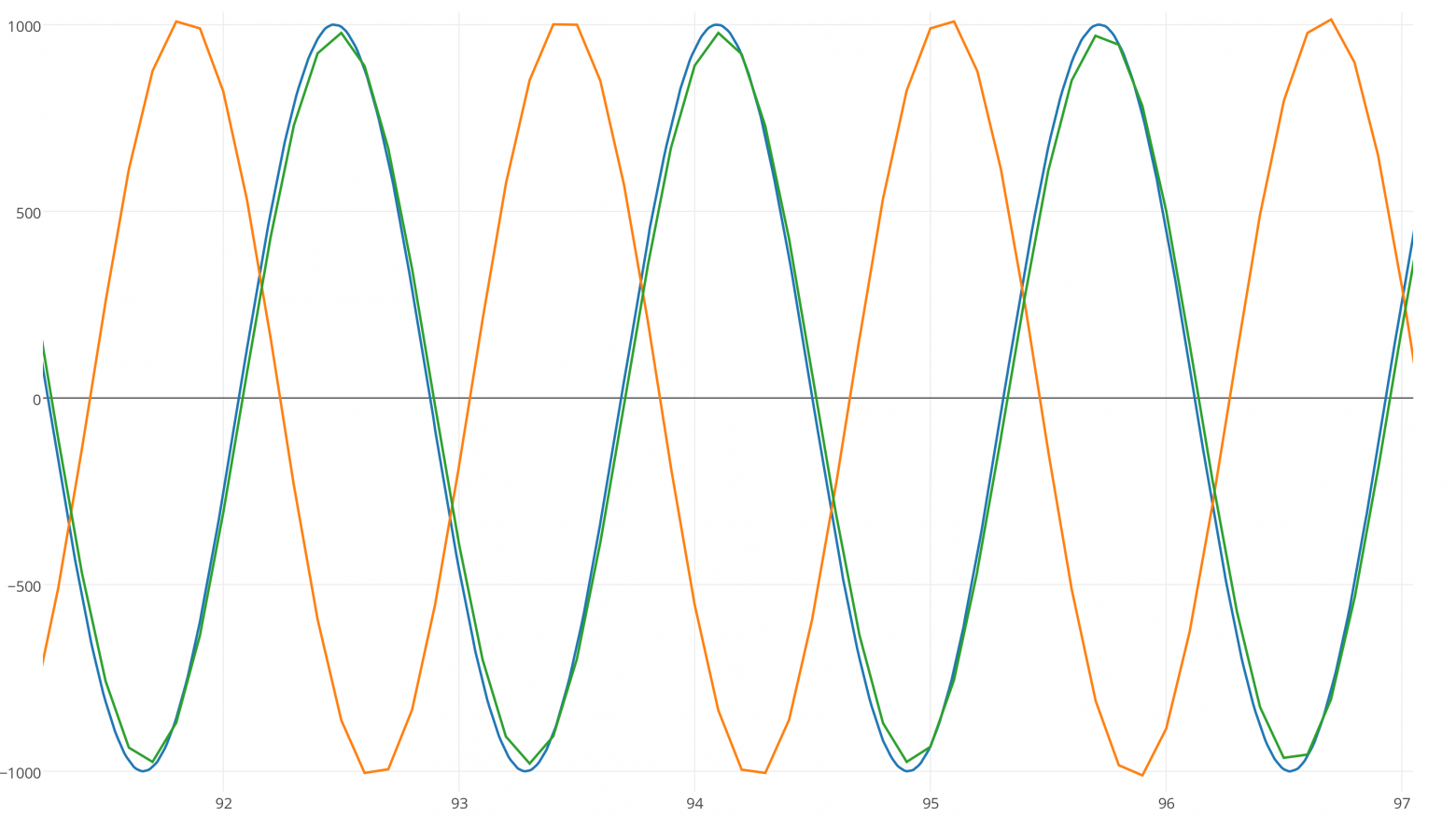
Мы чётко можем это заметить, увеличив шаг времени до 0,25 секунды.
RK4 сохраняет верную частоту, но теряет энергию:
А симплектический метод Эйлера в среднем намного лучше сохраняет энергию:
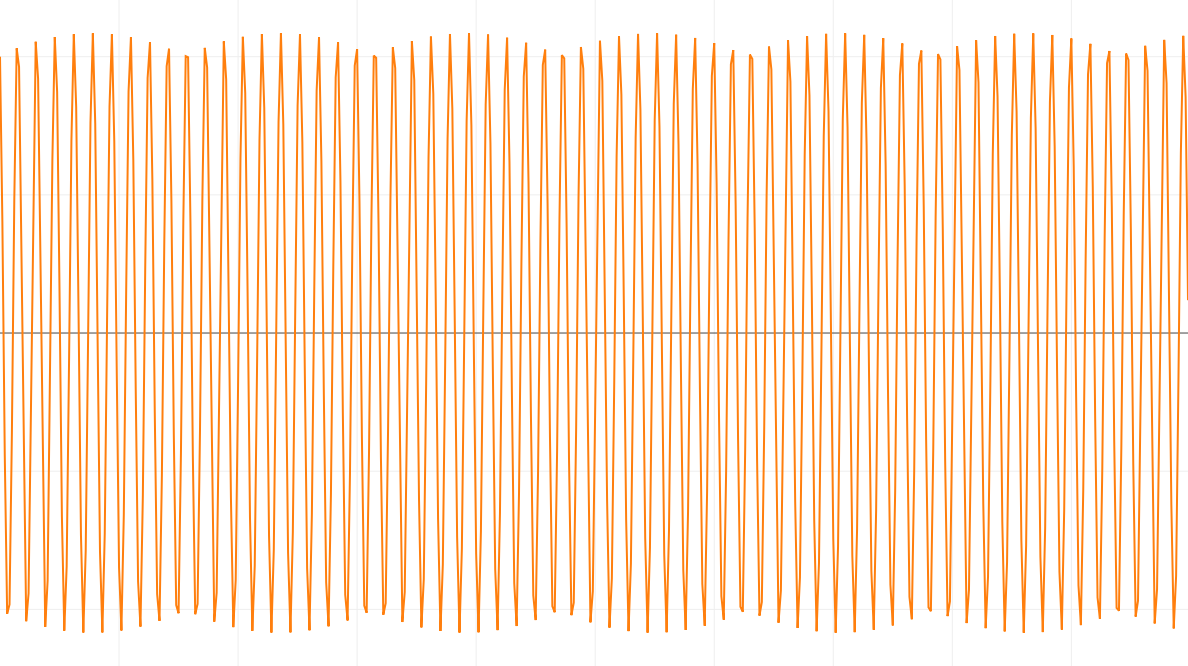
Но от сдвигается от фазы. Какой интересный результат! Как вы видите, если RK4 имеет более высокий порядок точности, то он не обязательно «лучше». В этом вопросе есть множество нюансов.
Заключение
Мы реализовали три различных интегратора и сравнили результаты.
- Явный метод Эйлера
- Симплектический метод Эйлера
- Метод Рунге-Кутты порядка 4 (RK4)
Так какой же интегратор стоит использовать в игре?
Я рекомендую симплектический метод Эйлера. Он «дёшев» и прост в реализации, гораздо стабильнее явного метода Эйлера и в среднем стремится к сохранению энергии даже при близких к предельным условиях.
Если вам действительно нужна бОльшая точность, чем у симплектического метода Эйлера, я рекомендую посмотреть на симплектические интеграторы более высокого порядка, рассчитанные на гамильтоновы системы. Таким образом вы изучите более современные техники интегрирования высокого порядка, которые лучше подходят для симуляций, чем RK4.
И наконец, если вы всё ещё пишете в игре такое:
То потратьте секунду и замените эти строки на: