- Теоретическая механика: Решебник Яблонского: Сложное движение (К7, К8)
- Задание К.7. Определение абсолютной скорости и абсолютного ускорения точки
- Задание К.8. Определение угловых скоростей звеньев планетарного редуктора
- iSopromat.ru
- Задача
- Решение
- Решение задач, контрольных и РГР
- VI. Определение абсолютной скорости
Теоретическая механика: Решебник Яблонского:
Сложное движение (К7, К8)
Бесплатный онлайн решебник Яблонского. Выберите задание и номер варианта для просмотра решения. Смотрите также способы и примеры решения задач по темам сложное движение точки и тела и кинематика механизмов.
Задание К.7. Определение абсолютной скорости и абсолютного ускорения точки
Точка M движется относительно тела D. По заданным уравнениям относительного движения точки M и движения тела D определить для момента времени t=t1 абсолютную скорость и абсолютное ускорение точки M.
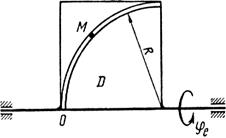
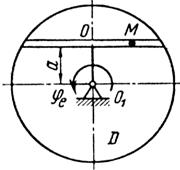
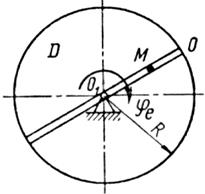
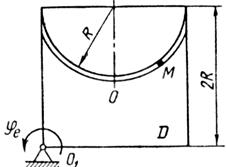
Схемы механизмов показаны на рис. 99–101, а необходимые для расчета данные приведены в табл. 34.
Примечания. Для каждого варианта положение точки M на схеме соответствует положительному значению sr; в вариантах 5, 10, 12, 13, 20–24, 28–30 OM=sr – дуга окружности; на схемах 5, 10, 12, 21, 24 OM – дуга, соответствующая меньшему центральному углу. Относительное движение точки M в вариантах 6 и 27 и движение тела D в вариантах 23 и 29 определяются уравнениями, приведенными в последнем столбце табл. 34.
Варианты с решением: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 (решено 100%)
Задание К.8. Определение угловых скоростей звеньев планетарного редуктора
Найти угловые скорости ведомого вала II и сателлитов редуктора. Схемы редукторов показаны на рис. 104–106, необходимые для расчета данные приведены в табл. 36.
Примечания. Положительный и отрицательный знаки угловых скоростей означают соответственно направление вращения против и по часовой стрелке, если смотреть со стороны ведущего вала I (для редуктора с цилиндрическими колесами) или со стороны положительного направления соответствующей оси (для редуктора с коническими колесами).
В вариантах 26 и 28 использованы численные данные из сборника 2006 г. издания. В сборнике 1985 г. численные данные для этих двух вариантов поменяны местами относительно более нового издания, а схемы редукторов те же самые. Поэтому если вам нужно сделать подсчеты по изданию 1985 г. (или любого другого, где задания отличаются только значениями величин) – просто подставьте свои числа в формулы из решения нужного варианта.
iSopromat.ru

Пример определения для заданного момента времени абсолютной скорости и абсолютного ускорения точки по заданным уравнениям относительного движения точки и треугольника вращающегося вокруг оси.
Задача
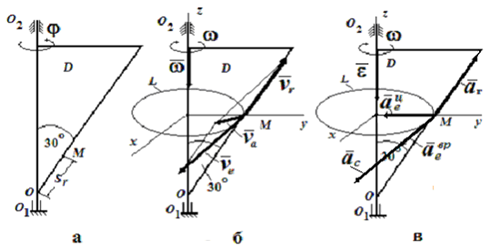
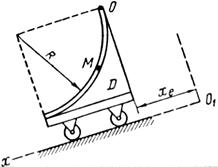
Треугольник D вращается вокруг оси O1O2 (рис. 1, а). По стороне треугольника движется точка M. По заданным уравнениям относительного движения точки M и движения треугольника D определить для момента времени t= t1 абсолютную скорость и абсолютное ускорение точки M.
Решение
Точка M совершает сложное движение. Движется относительно треугольника D и вместе с треугольником вращается вокруг оси O1O2. Тогда движение точки относительно треугольника будет относительным, движение вместе с треугольником – переносным.
Будем считать, что в заданный момент времени плоскость чертежа совпадает с плоскостью треугольника D. Положение точки M на треугольнике D определяется расстоянием sr= OM.
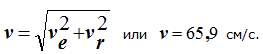
Абсолютную скорость точки М найдем как геометрическую сумму относительной и переносной скоростей:
Модуль относительной скорости vr = | vr |, где
vr= dsr/dt = 24π sin(3π t) — алгебраическое значение относительной скорости.
Положительный знак у vr показывает, что вектор vr направлен в сторону возрастания sr.
Модуль переносной скорости
где R – радиус окружности L, описываемой той точкой тела, с которой в данный момент совпадает точка М;
R = srsin 30° = 10,0 см;
ωe – модуль угловой скорости тела
Отрицательный знак у величины ωe показывает, что вращение треугольника происходит вокруг оси Oz в сторону, обратную направлению отсчета угла φ. Поэтому вектор ωe направлен по оси Oz вниз (рис. 1, б).
Модуль переносной скорости по формуле (1)
Вектор ve направлен по касательной к окружности L в сторону вращения тела.
Так как ve и vr взаимно перпендикулярны, модуль абсолютной скорости точки М
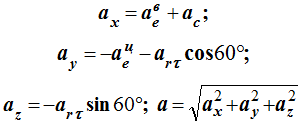
Абсолютное ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений
или в развернутом виде
Модуль относительного касательного ускорения

Отрицательный знак arτ показывает, что вектор arτ направлен в сторону отрицательных значений sr. Знаки vr и arτ различны, следовательно, относительное движение точки М замедленное.
Относительное нормальное ускорение

так как траектория относительного движения – прямая ( ρ = ∞).
Модуль переносного вращательного ускорения
где εе = | εе | – модуль углового ускорения тела D
Знаки εе и ωe одинаковы; следовательно, вращение треугольника D ускоренное, направления векторов εе и ωe совпадают (рис. 1, б, в).
Согласно (2) ae в = 102 см/с 2 . Вектор ae в направлен в ту же сторону, что и вектор ve.
Модуль переносного центростремительного ускорения
Вектор a ц e направлен к центру окружности L.
Модуль кориолисова ускорения
С учетом найденных выше значений ωe и vr получаем
Вектор aC направлен, согласно правилу векторного произведения, к нам — перпендикулярно плоскости треугольника D (рис. 1, в).
Модуль абсолютного ускорения точки М находим способом проекций:
Результаты расчета сведены в таблицу 1.

Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах

Решение задач, контрольных и РГР
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
— Рамки A4 для учебных работ
— Миллиметровки разного цвета
— Шрифты чертежные ГОСТ
— Листы в клетку и в линейку
VI. Определение абсолютной скорости
И абсолютного ускорения точки. Задание К.5.
Точка М движется относительно тела D. По заданным уравнениям относительного движения точки М и движения тела D определить для момента времени t = t1 абсолютную скорость и абсолютное ускорение точки М.
Схемы механизмов показаны на рис. 26-28, а необходимые для расчета данные приведены в табл. 10.
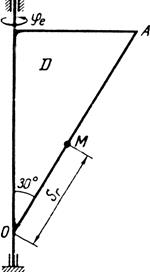
Пример выполнения задания. Дано: схема механизма (рис. 29),
sr = OM = 16 — 8 cos (3πt) см; φс=0,9t 2 -9t 3 рад; t1=2,9 c.
Решение. Будем считать, что в заданный момент времени плоскость чертежа (рис. 29) совпадает с плоскостью треугольника D. Положение точки М на теле D определяется расстоянием sr = ОМ.
Абсолютную скорость точки М найдем как геометрическую сумму относительной и переносной скоростей:

Модуль относительной скорости  ,
,
 .
.
 =65,2 см/с; vr = 65,2 см/с.
=65,2 см/с; vr = 65,2 см/с.
Положительный знак у показывает, что вектор  направлен в сторону возрастания sr.
направлен в сторону возрастания sr.
Модуль переносной скорости
| ve=Rωe, | (1) |
где R — радиус окружности L, описываемой той точкой тела, с которой в данный момент совпадает точка М, R = sr sin 30° = 10,0 см; ωe, – модуль угловой скорости тела:
ωе = |  |; = dφе/dt= 1,8t – 27t 2 .
|; = dφе/dt= 1,8t – 27t 2 .
= -0,93 рад/с; ωе = 0,93 рад/с.
Отрицательный знак у величины показывает, что вращение треугольника происходит вокруг оси Oz в сторону, обратную направлению отсчета угла φ. Поэтому вектор ωе направлен по оси Oz вниз (рис. 30, а).
Таблица 10
| Номер варианта (рис. 26-28) | Уравнение относительного движения точки М OM=sк=sк(t) см | Уравнение движения тела | t1, с | R, см | а, см | α, град | Дополнительные данные |
| φe=φe(t), рад | xe=xe(t), см | ||||||
| 18sin(πt/4) | 2t 3 -t 2 | — | 2 /3 | — | — | ||
| 20sin(πt) | 0,4t 2 +t | — | 5 /3 | — | — | ||
| 6t 3 | 2t+ 0,5t 2 | — | — | — | |||
| 10sin(πt/6) | 0,6t 2 | — | — | — | |||
| 40π соз(πt/6) | 3t-0,5t 3 | — | — | — | |||
| — | — | 3t+0,27t 3 | 10 /3 | — | — | φr=0,15π/t 3 | |
| 20cos(2πt) | 0,5t 2 | — | 3 /8 | — | |||
| 6(t+0,5t 2 ) | t 3 -5t | — | — | — | |||
| 10(1+sin(2πt) | 4t+1,6t 2 | — | 1 /8 | — | — | — | |
| 20π соs(πt/4) | 1,2t-t 2 | — | 4 /3 | — | |||
| 25sin(πt/3) | 2t 2 -0,5t | — | — | — | |||
| 15πt 3 /8 | 5t-4t 2 | — | — | ||||
| 120πt 2 | 8t 2 -3t | — | 1 /3 | — | — | ||
| 3+14sin(πt) | 4t-2t 2 | — | 2 /3 | — | — | ||
| 3π(t 2 +t) | 0,2t 3 +t | — | — | ||||
| 20sin(πt) | t-0,5t 2 | — | 1 /3 | — | — | ||
| 8t 3 +2t | 0,5t 2 | — | — |  | — | ||
| 10t+t 3 | 8t-t 2 | — | — | — | |||
| 6t+4t 3 | t+3t 2 | — | — | — | |||
| 30π соs(πt/6) | 6t+t 2 | — | — | — | |||
| 25π(t+t 2 ) | 2t-4t 2 | — | 1 /2 | — | — | ||
| 10π sin(πt/4) | 4t-0,2t 2 | — | 1 /3 | — | — | ||
| 6πt 2 | — | — | — | — | φ=5πt 3 /6; О1О=О2А=30 см | ||
| 75π(0,1t+0,3t 3 ) | 2t-0,3t 2 | — | — | — | |||
| 15sin(π/t 3 ) | 10t-0,1t 2 | — | — | — | — | ||
| 8cos(π/t 2 ) | -2πt 2 | — | 3 /2 | — | — | ||
| — | — | 50t 2 | — | — | φr=5πt 3 /48 | ||
| 2,5πt 2 | 2t 3 -5t | — | — | — | |||
| 5πt 3 /4 | — | — | — | — | φ=πt 3 /8; О1О=О2А=40 см | ||
| 4πt 2 | — | t 3 +4t | — | — |
Примечания. Для каждого варианта положение точки M на схеме соответствует положительному значению sr; в вариантах 5, 10, 12, 13, 20—24, 28 — 30 OM= sr —дуга окружности; на схемах 5, 10, 12, 21, 24 ОМ — дуга, соответствующая меньшему центральному- углу. Относительное движение точки M в вариантах 6 и 27 и движение тела D в вариантах 23 и 29 определяются уравнениями, приведенными в последнем столбце табл. 10.
 |  |
 |  |
 |  |
 |  |
 |  |
| Рис. 26. |
 |  |
 |  |
 |  |
 |  |
 |  |
| Рис. 27. |
 |  |
 |  |
 |  |
 |  |
 |  |
| Рис. 28. |
 | Модуль переносной скорости, по формуле (1), ve = 9,3 см/с. Вектор  направлен по касательной к окружности L в сторону вращения тела. Так как и взаимно перпендикулярны, модуль абсолютной скорости точки М направлен по касательной к окружности L в сторону вращения тела. Так как и взаимно перпендикулярны, модуль абсолютной скорости точки М  , v = 65,9 см/с. Абсолютное ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений: , v = 65,9 см/с. Абсолютное ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений:  , или в развернутом виде , или в развернутом виде  |
| Рис. 29 |
Модуль относительного касательного ускорения
 где
где 
При t = 2 /9 c.  = –355 см/с 2 ;
= –355 см/с 2 ;  = 355 см/с 2 .
= 355 см/с 2 .
Отрицательный показывает, что вектор  направлен в сторону отрицательных значений sr. Знаки и одинаковы; следовательно, относительное движение точки М ускоренное.
направлен в сторону отрицательных значений sr. Знаки и одинаковы; следовательно, относительное движение точки М ускоренное.