DSPL-2.0 — свободная библиотека алгоритмов цифровой обработки сигналов
Распространяется под лицензией LGPL v3
В предыдущих разделах мы подробно рассмотрели расчет аналоговых фильтров с заданными характеристиками. Пришло время переходить к анализу цифровых фильтров. Необходимо разделить понятия дискретного и цифрового фильтра.
Дискретным мы будем называть фильтр, импульсная характеристика которого является дискретной, а коэффициенты передаточной функции рассчитаны точно без ошибок округления.
Под цифровым фильтром мы будем понимать дискретный фильтр, коэффициенты передаточной характеристики которого рассчитаны не точно, а с ошибками округления вызванными конечной разрядностью представления числа.
На практике все рассчитанные фильтры являются цифровыми, так как разрядность представления числа ограничена. Однако использование компьютера позволяет производить операции с 64-битными числами с плавающей точкой, что минимизирует ошибки округления, поэтому можно предполагать, что рассчитанные с такой разрядностью фильтры «почти дискретные».
Важно отметить, что округление коэффициентов устойчивого дискретного фильтра, даже самое незначительное, может привести к неустойчивому цифровому фильтру. Поэтому при расчете фильтров, особенно фильтров высокого порядка, всегда необходимо проверять их устойчивость.
В цифровых системах сигналы представляют собой последовательности отсчетов, взятые, как правило, через равные промежутки времени . Ранее мы уже рассматривали модель дискретного сигнала :
Графически процесс дискретизации сигнала показан на рисунке 1.

Рассмотрим преобразование Лапласа дискретного сигнала :
Важное замечание. Если , то получаем дискретно-временное преобразование Фурье дискретного сигнала, при этом является периодической функцией частоты с периодом , кроме того, если , то
Кружочками условно показаны нули образа , а крестиками — полюсы.

Важно отметить, что периодичность дискретного преобразования Лапласа соответствует периодичности преобразования Фурье дискретного сигнала . Однако, как мы знаем из теории дискретного преобразования Фурье, на каждом периоде повторения спектр дискретного сигнала может быть искажен эффектом алиасинга, т.е. наложением «хвостов» исходной спектральной плотности из высших зон Найквиста (заполненная точками область на карте нулей и полюсов образа соответствует высшим зонам Найквиста).
В случае дискретного преобразования Лапласа эффект алиасинга сохраняется, и периодический образ на каждом периоде отличается от исходного образа . Так например, мы можем наблюдать алиасинг полюсов из высших зон Найквиста при неверном выборе частоты дискретизации. Если все полюсы исходного образа попадают в первую зону Найквиста, то при дискретизации они периодически разможатся, как это показано на рисунке 2.
Положение нулей дискретного преобразования Лапласа , как правило отличается от положения нулей исходного образа в результате эффекта алиасинга.
Рассмотрим процесс фильтрации дискретного сигнала . Согласно свойству преобразования Лапласа, процесс фильтрации во временно́й области сводится к умножению образа исходного сигнала на передаточную характеристику фильтра , которая в свою очередь, представляет преобразование Лапласа импульсной характеристики фильтра . Тогда преобразование Лапласа сигнала на выходе фильтра можно записать:
Первый случай. — образ дискретного сигнала, удовлетворяет (3), а — передаточная характеристика непрерывного фильтра, и свойство (3) не выполняется, значит также не удовлетворяето (3). Тогда можно сделать вывод о том, что при прохождении дискретного сигнала через аналоговый фильтр, выходной сигнал получается аналоговым. Аналоговый фильтр производит восстановление непрерывного сигнала по имеющемуся дискретному.
Второй случай. удовлетворяет (3), также удовлетворяет (3) (импульсная характеристика фильтра является дискретной), причем интервалы дискретизации сигнала и фильтра одинаковые и равны . Тогда в результате произведения также удовлетворяет (3). Таким образом, при прохождении дискретного сигнала через дискретный фильтр, выходной сигнал получается дискретным, с той же частотой дискретизации.
Третий случай. и удовлетворяют (3), но интервал дискретизации сигнала равен , а интервал дискретизации импульсной характеристики фильтра (исходный сигнал и и импульсная характеристика фильтра дискретизированы с разной частотой). В этом случае , в частных случаях, может удовлетворять (3), но период дискретизации выходного сигнала , будет равен «наименьшему общему кратному» периодов и . Заметим, что термин «наименьшее общее кратное» взят в кавычки, потому что и могут быть вещественными числами, в том числе и иррациональными. Тогда понимается как вещественное число, которое делится нацело как на , так и на . Например, если , а , то . Данный на практике не встречается, так как требует реализации цифровых схем, работающих на разных тактовых частотах. Разработка таких схем сопряжена с трудностями синхронизации при переходе данных из модулей, работающих на различных тактовых частотах.
Основное правило — для дискретных и цифровых фильтров интервалы дискретизации сигнала и фильтра должны быть равны.
Таким образом, для того чтобы на выходе фильтра получить дискретный сигнал, необходимо чтобы импульсная характеристика фильтра также была дискретной, а значит передаточная характеристика дискретного фильтра может быть представлена как результат дискретного преобразования Лапласа:
Если у дискретного фильтра количество коэффициентов ограничено, то такой фильтр называют фильтром с конечной импульсной характеристикой (КИХ-фильтром) [1] , а если количество коэффициентов бесконечно, то такой фильтр называют фильтром с бесконечной импульсной характеристикой (БИХ-фильтр) [2] .
При переходе от аналогового фильтра к цифровому, происходит периодическое размножение передаточной характеристики вдоль оси . При этом, переменная в образах дискретного преобразования Лапласа всегда присутствует только в показателе экспоненты, для обеспечения периодичности передаточных характеристик дискретных систем [1, стр 155].
В результате периодизации также происходит периодическое размножение нулей и полюсов, что доставляет некоторые неудобства. Для облегчения анализа вводят переменную вида:
Отображение не является конформным [2, стр. 145], потому что множество точек плоскости отображается в одну точку плоскости .
Графически отображение -плоскости в комплексную -плоскость показано на рисунке 3.

Рассмотрим некоторые особенности отображения (7).
Если , где , то для всех этих точек .
Если чисто вещественно, то и также вещественное, причем 0″/>. Заметим, что при , (внутри единичной окружности), а при величина (вне единичной окружности).
При , точка на мнимой оси плоскости отображается в точку , расположенную на единичной окружности и повернутой на угол рад. Таким образом, вся мнимая ось плоскости отображается в единичную окружность плоскости . Причем, один оборот единичной окружности соответствует от до рад/c.
Левая полуплоскость комплексной плоскости отображается внутрь единичной окружности плоскости . Действительно если , то представляет вектор длины повернутый на угол рад. При , длина вектора .
Правая полуплоскость комплексной плоскости отображается вне единичной окружности плоскости .
При переходе из комплексной -плоскости в комплексную -плоскость все бесконечно-повторяющиеся нули и полюса дискретного фильтра в -плоскости отображаются в конечное количество нулей и полюсов в -плоскости. Тогда выражение для передаточной характеристики дискретного фильтра может быть представлено при помощи подстановки (7) через конечное количество нулей и полюсов в -плоскости как:
Таким образом, главный вывод, который мы должны сделать заключается в следующем: при переходе от аналогового фильтра к дискретному, образ по Лапласу становится периодическим по мнимой оси, а количество нулей и полюсов фильтра бесконечным. Но при переходе в комплексную –плоскость мы получаем снова конечное количество нулей и полюсов, и соответственно конечное количество коэффициентов дискретного фильтра.
Рассмотрим некоторые свойства -преобразования. При этом мы будем рассматривать свойства относительно индексов отсчетов в предположении . В результате мы можем опустить период дискретизации в выражениях -преобразования.
Линейность. -образ суммы двух сигналов равен сумме -образов этих сигналов. Действительно, пусть есть два дискретных сигнала и , . Найдем -преобразование их суммы :
Можно показать, что данное свойство также справедливо и для циклической задержки ограниченной выборки сигнала:
Теорема о свертке. Пусть дано два сигнала ограниченной длительности и , . Найдем -преобразование их циклической свертки :
При выводе было использовано свойство циклической задержки -преобразования. Таким образом циклическая свертка сигналов соответствует произведению их -образов.
Аналогично, используя свойство задержки, можно показать, что -образ линейной свёртки сигналов равен произведению их -образов:
Ранее мы говорили о том, что пассивные аналоговые цепи описываются интегро-дифференциальными уравнениями непрерывного времени . При этом математический аппарат преобразования Лапласа позволяет перейти к алгебраическим уравнениям комплексной переменной при описании характеристик комплексных сопротивлений двухполюсников и передаточных функций четырехполюсников.
Ограничение количества пассивных элементов аналогового фильтра приводит к ограничению порядков интегро-дифференциальных уравнений и, соответственно, полиномов переменной при описании передаточных характеристик.
Прохождение сигнала через аналоговый фильтр описывается интегралом свертки входного сигнала и непрерывной импульсной характеристики , которая в свою очередь не может иметь произвольную форму при ограничении порядка аналогового фильтра, потому что является результатом решения интегро-дифференциальных уравнений ограниченного порядка.
Дискретные системы, в свою очередь, описываются разностными уравнениями дискретного времени . По аналогии с аналоговыми фильтрами, мы не можем требововать бесконечных порядков разностных уравнений, потому что это потребует бесконечных вычислительных ресурсов. Таким образом, мы должны ограничить порядки разностных уравнений, которые связывают выходной сигнал дискретного фильтра с входным сигналом , а также со значениями выходного сигнала на предыдущих тактах .
Заметим, что здесь мы также ведем рассмотрение относительно индексов отсчетов сигналов, в предположении c.
Общее разностное уравнение линейного цифрового фильтра имеет вид:
Временной индекс изменяется от до бесконечности, т.к. предполагается, что фильтр после включения может работать неограниченно долго.
Рассмотрим -преобразование разностного уравнения (16). -образ выходного сигнала равен:
Z-преобразование (прямое и обратное, примеры). Основные теоремы Z-преобразования.
При большом числе разрядов АЦП цифровой сигнал x(n) эквивалентен дискретному сигналу  , который представляется в виде последовательности взвешенных дельта-функций, площадь которых равна не единице, а значению непрерывного сигнала в моменты взятия отсчетов. Тогда, используя фильтрующее во времени свойство дельта-функций, запишем:
, который представляется в виде последовательности взвешенных дельта-функций, площадь которых равна не единице, а значению непрерывного сигнала в моменты взятия отсчетов. Тогда, используя фильтрующее во времени свойство дельта-функций, запишем:  где n — номера отсчетов.
где n — номера отсчетов.
Возьмем преобразование Лапласа от сигнала :
 =
=  =
=  =
=  . (1)
. (1)
По этому выражению определяется дискретное преобразование Лапласа (ДПЛ) по отсчетам x(nT) из непрерывного сигнала. Однако для описания цифровых систем ДПЛ не нашло широкого применения из-за неудобства, связанного с частым повторением в формулах ДПЛ функции  . От этого недостатка свободно Z — преобразование, которое следует из ДПЛ введением новой комплексной переменной
. От этого недостатка свободно Z — преобразование, которое следует из ДПЛ введением новой комплексной переменной  .
.
Тогда из (1) имеем формулу прямого Z — преобразования для сигнала x(nT)
 . (2)
. (2)
Сравнивая (1) и (2), видим, что формула для прямого Z — преобразования проще и компактнее формулы для прямого ДПЛ.
Примеры прямого Z — преобразования.
Единичный импульс 
Аналогично для  имеем X(p)=1.
имеем X(p)=1.
Единичный дискретный скачок
 =
=  .
.
Аналогично для x(t)=1(t) имеем  откуда следует удобное для практики соответствие между переменной p в преобразовании Лапласа и переменной z в Z — преобразовании
откуда следует удобное для практики соответствие между переменной p в преобразовании Лапласа и переменной z в Z — преобразовании  .
.
Наряду с прямым существует обратное Z — преобразование, которое определяется по выражению
 =
=  (3)
(3)
где  — вычеты X(z). Однократные вычеты определяются по формуле
— вычеты X(z). Однократные вычеты определяются по формуле
 (4)
(4)
Выражение для X(z) в этой формуле следует представлять в следующем виде:
где  ,
,  — нули и полюсы функции X(z) соответственно. Часто букву Т в описании этих сигналов опускают, полагая Т=1, т.е. x(nT)=x(n).
— нули и полюсы функции X(z) соответственно. Часто букву Т в описании этих сигналов опускают, полагая Т=1, т.е. x(nT)=x(n).
Основные теоремы Z — преобразования
Если  , то
, то  .
.
2) Смещение во времени.
Если  , то
, то  .
.
3) Разность дискретных функций.
Если  , то
, то  =
=  .
.
Аналогия: если  то
то  ,
,  .
.
4) Сумма дискретных функций.
Если  то
то 
Аналогия: если  то
то 
5) Свертка двух дискретных функций.
Если  то
то 
6) Предельные соотношения:

 .
.
Из этих теорем следует, что между преобразованием Лапласа и Z — преобразованием очень много общего.
34. Системная функция ЦСУ: определение, связь с разностным уравнением ЦСУ.
По аналогии с передаточными функциями для аналоговых систем в цифровых системах введено понятие системных функций, которые по определению есть отношение Z — преобразования от выходного цифрового сигнала y(nT) к Z — преобразованию от входного цифрового сигнала x(nT), т.е. 
Дифференциальные уравнения применимы для аналоговых систем, а цифровые системы описываются разностными уравнениями. В разностных уравнениях время изменяется через конечный временной интервал Т, называемый периодом дискретизации.
Покажем на примере, как от дифференциального уравнения переходят к разностному уравнению.
Инерционное звено с передаточной функцией

описывается дифференциальным уравнением, следующим из соотношения
 , откуда Y(p) × (1+pa) = X(p), тогда
, откуда Y(p) × (1+pa) = X(p), тогда 
Так как  ,
,
то введя в дифференциальное уравнение дискретное время nT вместо t, получим следующее разностное уравнение  , или
, или

Этим уравнением описывается цифровое инерционное звено первого порядка.
Системные функции W(z) цифровых звеньев можно представить в двух формах:с положительными степенями z в виде
 , (1)
, (1)
с отрицательными степенями z, которая получается из (1) умножением числителя и знаменателя на дробь  тогда
тогда
 (2)
(2)
где 
 , откуда а0 = 1.
, откуда а0 = 1.
Вторая форма записи W(z) используется чаще.
По определению  и с учетом (2) имеем:
и с учетом (2) имеем:
откуда  .
.
Перейдя от изображений к оригиналам, из этого выражения получим следующее разностное уравнение при а0=1:
 (3)
(3)
где m — порядок разностного уравнения.
Таким образом из системной функции (2) однозначно определяется разностное уравнение (3) и наоборот, по разностному уравнению (3) однозначно определяется системная функция (2).
Дата добавления: 2015-06-17 ; просмотров: 8958 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Решение обыкновенных линейных разностных уравнений с постоянными коэффициентами
Страницы работы

Содержание работы
Решение обыкновенных линейных разностных уравнений
с постоянными коэффициентами
Связь выхода и входа линейной дискретной системы может быть описана обыкновенным линейным разностным уравнением с постоянными коэффициентами
 ,
,
где y[n]— выходной сигнал в момент n,
x[n] — входной сигнал в момент n,
Для решения таких уравнений могут использоваться два метода
- Прямой метод,
- Метод Z – преобразования.
Вначале рассмотрим решение линейного разностного уравнения с помощью прямого метода.
Общее решение неоднородного (с отличной от нуля правой частью) линейного разностного уравнения равно сумме общего решения линейного однородного разностного уравнения и частного решения неоднородного уравнения

Общее решение однородного разностного уравнения (zero-input response) yh[n]
определяется в виде
 .
.
Подставляя это решение в однородное уравнение, получаем

или  .
.
Такой полином называют характеристическим полиномом системы. Он имеет N корней  . Корни могут быть действительными или комплексными и некоторые корни — совпадающими (кратными).
. Корни могут быть действительными или комплексными и некоторые корни — совпадающими (кратными).
Если корни являются действительными и разными, то решение однородного уравнения имеет вид
 ,
,
где коэффициенты  определяются по начальным условиям.
определяются по начальным условиям.
Если некоторый корень, например, λ1 имеет кратность m, то соответствующий ему член решения приобретает форму
 .
.
Если все коэффициенты однородного уравнения и соответственно характеристического многочлена действительны, то два члена решения, соответствующие простым комплексно сопряженным корням  можно представить (записать) в виде
можно представить (записать) в виде  , при этом коэффициенты A, B определяются по начальным условиям.
, при этом коэффициенты A, B определяются по начальным условиям.
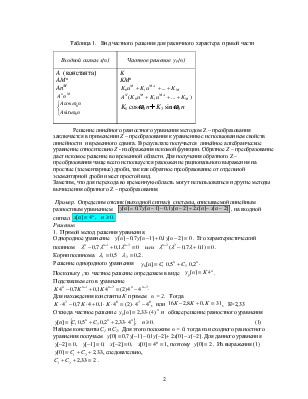
Вид частного решения yp[n] уравнения зависит от правой части (входного сигнала) и определяется согласно нижеприведенной таблице
Таблица 1. Вид частного решения для различного характера правой части





Решение линейного разностного уравнения методом Z – преобразования заключается в применении Z – преобразования к уравнению с использованием свойств линейности и временного сдвига. В результате получается линейное алгебраическое уравнение относительно Z — изображения искомой функции. Обратное Z – преобразование дает искомое решение во временной области. Для получения обратного Z – преобразования чаще всего используется разложение рационального выражения на простые (элементарные) дроби, так как обратное преобразование от отдельной элементарной дроби имеет простой вид.
Заметим, что для перехода во временную область могут использоваться и другие методы вычисления обратного Z – преобразования.
Пример. Определим отклик (выходной сигнал) системы, описываемой линейным разностным уравнением  , на входной сигнал
, на входной сигнал 
1. Прямой метод решения уравнения.
Однородное уравнение  . Его характеристический полином
. Его характеристический полином  .
.
Корни полинома  .
.
Решение однородного уравнения  .
.
Поскольку ,то частное решение определяем в виде  .
.
Подставляем его в уравнение
 .
.
Для нахождения константы К примем n = 2. Тогда
 , или
, или  , К=2,33
, К=2,33
Отсюда частное решение  и общее решение разностного уравнения
и общее решение разностного уравнения  (1)
(1)
Найдем константы С1 и С2. Для этого положим n = 0, тогда из исходного разностного уравнения получаем  . Для данного уравнения
. Для данного уравнения
 , поэтому
, поэтому  . Из выражения (1)
. Из выражения (1)
 , следовательно,
, следовательно,
 .
.
Далее положим n = 1, при этом из уравнения следует  . Поскольку
. Поскольку  , то
, то
 . Из выражения (1) для n = 1 имеем
. Из выражения (1) для n = 1 имеем  .
.
Получаем следующие два уравнения для С1 и С2
 .
.
Решение этой системы дает следующие значения: С1 =0,486 и С2 = -0,816.
Следовательно, общее решение данного уравнения

2. Решение методом Z – преобразования.
Возьмем Z – преобразование от исходного разностного уравнения  , учитывая свойство (теорему) временного сдвига
, учитывая свойство (теорему) временного сдвига  . Получаем
. Получаем
 Для данного уравнения
Для данного уравнения  , в связи с этим
, в связи с этим
 . Разрешая это уравнение относительно Y(z), имеем
. Разрешая это уравнение относительно Y(z), имеем
 .
.
Для данного случая  его Z — преобразование
его Z — преобразование  .
.
Подставляя его в предыдущее выражение, получаем решение уравнения в Z – области
 .
.
Найдем корни полинома 
 .
.
Для получения решения уравнения во временной области представим Y(z) в виде суммы элементарных дробей
 .
.
Определим коэффициенты A, B, C
 ,
,  ,
,
 .
.
Поэтому представление Y(z) как суммы элементарных дробей имеет вид
 .
.
Обратное Z – преобразование от  равно
равно 
Следовательно, решение уравнения во временной области имеет вид

 Составил: доц. Щетинин Ю.И.
Составил: доц. Щетинин Ю.И.