- Законы динамики
- Задачи динамики
- Основные виды сил
- Дифференциальные уравнения движения точки
- Прямолинейное движение точки
- Колебательное движение материальной точки
- Свободные колебания
- Колебания при вязком трении
- Вынужденные колебания
- Вынужденные колебания при наличии вязкого трения
- Общие теоремы динамики точки
- Теорема об изменении количества движения материальной точки
- Теорема об изменении момента количества движения материальной точки
- Центральная сила. Второй закон Кеплера
- Работа силы. Мощность
- Основные понятия
- Работа основных видов сил
- Теорема об изменении кинетической энергии точки
- Силовые поля и потенциальная энергия
- Основные виды потенциальных полей
- Динамика в физике — основные понятия, формулы и определения с примерами
- Взаимодействие тел и первый закон Ньютона
- Масса
- Как измеряют массу
- Второй закон Ньютона — основной закон динамики
- Третий закон Ньютона. Принцип относительности Галилея
- Деформация тел. Сила упругости. Закон Гука
- Силы трения. Силы сопротивления среды
- Движение тела под действием силы тяжести
- Движение тела, брошенного под углом к горизонту
- Закон всемирного тяготения
- Ускорение свободного падения на планетах
- Невесомость и перегрузки
- Основная задача динамики
- Законы динамики
- Второй и третий закон Ньютона
- Основные законы динамики в теоретической механике
- Основные законы динамики
- Первый закон (закон инерции):
- Второй закон (основной закон динамики):
- Третий закон (закон равенства действия и противодействия) :
- Четвертый закон (закон независимости действия сил):
Законы динамики
Первый закон Ньютона (закон инерции Галилея)
Существуют такие системы отсчета, относительно которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если точка покоилось в определенный момент времени, то она будет покоиться и в последующие моменты.
Не во всех системах отсчета выполняется закон инерции. Например, если мы выберем систему отсчета, связанную с ускоряющейся ракетой, то относительно этой системы, не взаимодействующие материальные точки, не будут двигаться прямолинейно и равномерно.
Инерциальная система отсчета – это система отсчета, в которой справедлив закон инерции.
Движение по инерции – это движение точки, совершаемое при отсутствии действующих на нее сил.
Второй закон Ньютона (основной закон динамики)
Взаимодействие на выбранную материальную точку со стороны других тел описывается вектором, который называется силой. При этом, в инерциальных системах отсчета, действие силы приводит к ускорению точки , которое пропорционально приложенной силе, имеет одинаковое с ней направление, и обратно пропорционально массе точки:
(1) .
Если есть радиус-вектор, проведенный из начала координат к точке, то ускорение есть вторая производная радиус-вектора по времени:
.
Производную по времени, в теоретической механике, обозначают точкой над переменной, а не штрихом, как в математическом анализе.
Если на точку действует не одна, а n сил, то в правой части производится суммирование по всем силам, действующих на точку. Тогда уравнение (1) примет вид:
(2) .
Третий закон динамики (закон равенства действия и противодействия)
Если две материальные точки действуют друг на друга, то сила, с которой первая точка действует на вторую, равна по абсолютной величине и противоположна по направлению силе, с которой вторая точка действует на первую. При этом силы направлены вдоль прямой, соединяющей точки.
Закон независимости сил
Несколько одновременно действующих на материальную точку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме.
То есть уравнение (2) можно записать в виде:
, где .
Задачи динамики
Первая задача динамики
Зная закон движения точки, определить действующую на нее силу.
Вторая (основная) задача динамики
Зная действующие на точку силы, определить ее закон движения.
Основные виды сил
Единицей измерения силы в СИ является 1 ньютон (1 Н = кг·м/с 2 ). Это сила, которую нужно приложить к точке массой 1 кг, чтобы она получила ускорение 1 м/с 2 .
Сила тяжести.
Сила тяжести действует на любую материальную точку, находящуюся на поверхности Земли. Она пропорциональна массе точки и равна
,
где – ускорение свободного падения, направленное вниз. Его величина зависит от широты и высоты над уровнем моря. Стандартное значение, принятое при построении систем единиц, составляет м/с 2 .
Сила тяготения.
.
Здесь – массы точек, r – расстояние между ними, Н·м 2 /кг 2 – гравитационная постоянная.
Для точки массы m на поверхности Земли имеем: . Отсюда . Тогда силу тяготения Земли можно вычислять по формуле:
,
где R = 6371 км – радиус Земли; r – расстояние от точки до центра Земли.
Сила электростатического взаимодействия.
,
где – величины зарядов; r – расстояние между ними; Н·м 2 /Кл 2 – коэффициент. Одноименные заряды отталкиваются, разноименные – притягиваются.
Сила трения скольжения
возникает при скольжении одного тела по поверхности другого. Она направлена в сторону, противоположную скорости движения. Ее величина определяется по формуле:
F = fN ,
где N – сила давления, перпендикулярная поверхности, с которой скользящее тело прижимается к поверхности; f – коэффициент трения, который зависит от материалов соприкасаемых тел.
Сила упругости.
Эта сила возникает при деформации упругих тел. Это могут быть растяжения, сжатия и изгибы. Она определяется по формуле
F = cλ ,
где λ – величина деформации; c – коэффициент, который зависит от материала упругого тела. Для пружины λ – это удлинение или сжатие пружины; c – коэффициент жесткости.
Сила вязкого трения.
При движении тела в вязкой среде с небольшими скоростями, на него действует сила трения, пропорциональная скорости движения:
F = μv ,
где v – скорость тела; μ – коэффициент сопротивления.
При больших скоростях, сила трения пропорциональна квадрату скорости.
Дифференциальные уравнения движения точки
Спроектируем уравнение (2) на оси прямоугольной системы координат. Пусть радиус вектор точки имеет в этой системе компоненты (проекции) . Тогда из векторного уравнения (2) получаем систему уравнений:
.
Это есть дифференциальные уравнения движения точки в прямоугольной системе координат.
Спроектируем уравнение (2) на оси естественного трехгранника:
.
Здесь – единичный вектор, направленный по касательной к траектории; – единичный вектор, перпендикулярный и лежащий в касательной плоскости траектории; – единичный вектор, перпендикулярный и . Поскольку , то .
Вводим пройденный путь s , измеренный вдоль дуги траектории точки. Пусть ρ – радиус кривизны траектории в рассматриваемой точке. Тогда, для естественного способа задания движения точки, уравнения движения примут вид:
.
Уравнения движения в полярных координатах для плоского движения:
.
Прямолинейное движение точки
Пусть ось x направлена вдоль линии движения точки. Тогда уравнение движения имеет вид:
(3) .
Его общее решение:
,
где – произвольные постоянные. Их находят из начальных условий:
.
Если сила Fx зависит только от времени, то из уравнения (3) сначала определяют скорость vx , а затем координату x , последовательно интегрируя уравнения:
.
Если сила зависит только от координаты x , то выполняют преобразование:
;
;
.
Колебательное движение материальной точки
Свободные колебания
Рассмотрим движение груза на пружинке. Считаем, что груз является материальной точкой; массой пружины можно пренебречь; и отсутствует сила тяжести. Пусть движение происходит вдоль оси x . За начало отсчета выберем такое положение груза, при котором пружина не деформирована. Тогда на точку действует только восстанавливающая сила упругости пружины, которая определяется по закону Гука:
(К1) ,
где x – деформация пружины; c – коэффициент жесткости. Он равен силе, которая возникает при деформации, равной единице (один метр) и имеет размерность [Н/м]. Из (К1) видно, что сила является восстанавливающей, то есть направлена так, чтобы вернуть точку в начало координат к недеформированному состоянию. Сила такого вида возникает не только при деформации пружины, но и во многих других случаях при небольшом отклонении точки от равновесного положения.
Составим уравнение движения точки и выполняем преобразования:
.
Введем обозначение . В результате получаем.
(К2) .
Уравнение (К2) называется дифференциальным уравнением свободных колебаний. Его также называют дифференциальным уравнением гармонических колебаний. Оно является линейным однородным дифференциальным уравнением второго порядка.
Ищем его решение в виде . Получаем характеристическое уравнение:
.
Оно имеет два мнимых корня: . Тогда общее решение уравнения (К2) имеет вид:
,
где и – произвольные постоянные. Они определяются из начальных условий. Пусть – координата и скорость точки в начальный момент времени , тогда
;
.
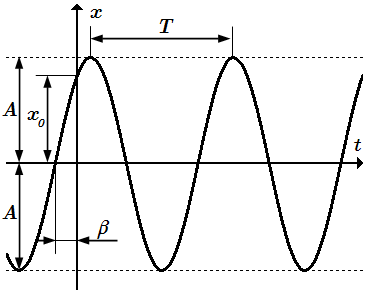
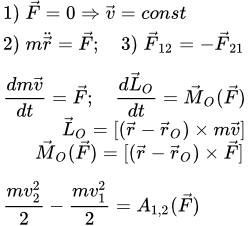
График гармонического движения точки.
Часто бывает удобно вместо постоянных интегрирования и перейти к новым постоянным A и β по формулам: . Тогда
(К3) .
Это есть уравнение гармонического колебательного движения точки. Здесь – амплитуда колебаний;
– фаза колебаний;
β – начальная фаза, ;
– циклическая частота колебаний, которую также называют угловой или собственной.
Период колебаний: .
Частота колебаний: – это число циклов колебаний, совершенных в единицу времени. Она широко применяется в технике, однако для математического описания более удобна угловая частота, которую мы будем использовать в дальнейшем и называть просто частотой.
Частота k и период T не зависят от начальных условий, а амплитуда и фаза – зависят. Кроме этого, k и T не зависят от амплитуды. Колебания, у которых частота и период не зависят от амплитуды, называют изохорными колебаниями. Если рассмотреть колебания с большой амплитудой, при которой закон Гука (К1) не выполняется, то уравнение (К2) не будет линейным и колебания не будут изохорными.
Влияние постоянной силы
Пусть теперь, наряду с восстанавливающей силой (К1), на точку действует постоянная сила P , например сила тяжести. Тогда уравнение движения примет вид:
.
Это приводит к смещению центра колебаний в сторону действия силы P на величину
δ ст = P/c .
Это смещение называют статическим отклонением. Если P – сила тяжести, то
.
Колебания при вязком трении
Пусть на точку, кроме силы упругости пружины, действует сила сопротивления среды. При малых скоростях она пропорциональна скорости точки:
. Это так называемое вязкое трение. Составим уравнение движения:
. Обозначив μ/m= 2 b , получаем:
(К4) . Составляем характеристическое уравнение:
(К5) . Оно имеет два корня:
.
Затухающие колебания
При b , корни характеристического уравнения (К5) комплексные:
. Тогда общее решение уравнения (К4) имеет вид:
,
где . Обозначим , . Тогда
(К6) .
, ;
– амплитуда (переменная величина);
b – коэффициент затухания;
– частота затухающих колебаний;
– период затухающих колебаний. Он больше периода свободных колебаний. При небольшом коэффициенте затухания (при b/k ≪ 1 ) T 1 ≈ T .
Колебания, происходящие по закону (К6) называются затухающими. График затухающих колебаний заключен между двумя кривыми x = ±Ae –bt , симметричными относительно оси t .
Затухающие колебания можно рассматривать как гармонические колебания с переменной амплитудой . Относительное изменение переменной амплитуды за период колебания называется декрементом колебаний. Он равен
. Модуль логарифма декремента называется логарифмическим декрементом. Он равен .
Апериодическое движение точки
При (или ) корни характеристического уравнения (К5) действительные. Поэтому движение точки является апериодическим.
При (или ) характеристическое уравнение (К5) имеет два различных действительных корня:
. Тогда общее решение уравнения (К4) имеет вид:
(К7) .
Сюда не входят тригонометрические функции. Поэтому это апериодическое движение. Точка может пройти через положение равновесия x = 0 не более одного раза.
Закон движения (К7) можно выразить через гиперболические функции, если положить: . Тогда
.
Перейдем к новым постоянным интегрирования A и β , выполнив подстановку:
. Тогда
.
При b = k характеристическое уравнение (К5) имеет два кратных вещественных корня . Общее решение уравнения (К4) имеет вид:
.
Движение также апериодическое. Точка может пройти через положение равновесия x = 0 не более одного раза.
Вынужденные колебания
Рассмотрим случай, когда кроме восстанавливающей силы , на точку действует возмущающая сила, меняющаяся по гармоническому закону:
(К8) . Составим уравнение движения:
.
Введем обозначение h=H/m . Разделив на m , получаем дифференциальное уравнение вынужденных колебаний:
(К9) .
Это линейное неоднородное дифференциальное уравнение с постоянными коэффициентами со специальной неоднородной частью. Его общее решение равно сумме общего решения однородного уравнения и частного (то есть любого, отличного от нулевого) решения данного уравнения:
;
;
.
Общее решение однородного уравнения: .
Ищем частное решение в виде . В результате получаем:
;
.
Коэффициент динамичности. Действие постоянной возмущающей силы величины H приводит к статическому отклонению . Периодическая возмущающая сила (К8) с амплитудой H приводит к периодическим колебаниям с амплитудой . В связи с этим вводят коэффициент динамичности: .
Он показывает, во сколько раз амплитуда колебаний превосходит статическое отклонение.
Явление резонанса и биения
Когда частота возмущающей силы равна частоте собственных колебаний p = k , коэффициент динамичности стремится к бесконечности, амплитуда колебаний неограниченно возрастает. Это явление называется резонансом. Уравнение движения точки при p = k имеет вид:
(К10) .
Оно имеет частное решение
.
Общее решение уравнения (К10):
.
Это уравнение показывает, что амплитуда вынужденных колебаний возрастает пропорционально времени. Фаза вынужденных колебаний отстает от фазы возмущающей силы на π/ 2 .
Биения.
Когда частота p возмущающей силы близка к собственной частоте k колебания точки, p/k ≈ 1 , возникает явление, называемое биениями. В этом случае частное решение уравнения (К9) имеет вид:
,
где .
Происходит наложение колебаний. Их можно рассматривать как вынужденные колебания частоты с переменной амплитудой, которая является периодической функцией с частотой .
Вынужденные колебания при наличии вязкого трения
Составим уравнение движения вынужденных колебаний при наличии вязкого трения:
.
Получаем дифференциальное уравнение:
.
Его общее решение имеет вид.
1) при b :
;
2) при b > k :
;
3) при b = k :
.
Здесь ;
ε определяется из уравнений:
.
Величины A и β являются постоянными интегрирования. Они определяются из начальных условий.
Общие теоремы динамики точки
Теорема об изменении количества движения материальной точки
Теорема об изменении количества движения материальной точки в дифференциальной форме
Изменение количества движения материальной точки за бесконечно малый промежуток времени dt равно элементарному импульсу равнодействующей сил, приложенных к этой точке:
.
Эту теорему можно сформулировать так:
Производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке:
(Т1) .
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если проинтегрировать уравнение (Т1) по времени от начального момента времени t = 0 до конечного момента t = t1 , то получим теорему в интегральной форме.
Теорема об изменении количества движения материальной точки в интегральной форме
изменение количества движения материальной точки за конечный промежуток времени [0,t1] равно импульсу силы, приложенной к этой точке, за тот же промежуток времени:
.
Здесь – скорость точки в моменты времени t = 0 и t = t 1 , соответственно.
Теорема об изменении момента количества движения материальной точки
Теорема об изменении момента количества движения материальной точки
Производная по времени от момента количества движения материальной точки, относительно произвольного центра O , равна моменту равнодействующей силы, приложенной к точке, относительно того же центра:
.
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если на точку действует несколько сил , то равнодействующая сила равна их геометрической сумме:
.
Тогда можно записать эту теорему так:
.
Далее будем считать, что точка O выбрана в начале координат. Тогда .
Центральная сила. Второй закон Кеплера
Пусть на точку действует центральная сила с центром в начале координат O . Тогда ее момент относительно O равен нулю. По теореме об изменении момента количества движения материальной точки имеем:
.
Если ввести секторную скорость , то она оказывается постоянной
.
Получаем второй закон Кеплера (закон площадей).
Второй закон Кеплера (закон площадей)
Под действием центральной силы точка движется по плоской кривой с постоянной секторной скоростью. То есть радиус-вектор точки заметает равные площади в любые равные промежутки времени.
Работа силы. Мощность
Основные понятия
Единицей измерения работы в СИ является 1 джоуль (1 Дж = 1 Н·м = кг·м 2 /с 2 ).
Работа силы при движении материальной точки от точки M 1 до точки M 2 равна сумме (интегралу) элементарных работ:
.
Если ввести скорость точки , то
.
Теорема о работе силы
Работа A равнодействующей силы на некотором перемещении равна алгебраической сумме работ Ak составляющих сил на том же перемещении:
.
Мощность – это величина работы, произведенная за единицу времени.
.
Единицей измерения мощности в СИ является 1 ватт (1 Вт = 1 Дж/с). Другие единицы мощности: 1 кВт (киловатт) = 1000 Вт; 1л.с.(лошадиная сила) = 736 Вт = 75 кгс·м/с.
Работа основных видов сил
Работа силы тяжести:
,
где P – сила тяжести, действующая на точку. Если начальная точка выше конечной, то работа положительна; если начальная точка ниже конечной, то отрицательна.
Работа силы упругости:
.
Здесь – деформация пружины в начальном положении; – в конечном.
Работа силы трения. Если сила трения постоянна, то
,
где s – длина пройденного точкой пути; – сила трения, которая всегда направлена в сторону, противоположную перемещению; f – коэффициент трения; N – нормальная реакция поверхности. Работа силы трения всегда отрицательна.
Работа силы тяготения.
На точку, находящуюся вблизи планеты Земля, на расстоянии r ≥ R от ее центра, действует сила притяжения
,
где R = 6371 км – радиус Земли. Тогда при перемещении точки из положения M1 в положение M2, сила тяготения совершит работу
.
Она не зависит от траектории движения тела.
Теорема об изменении кинетической энергии точки
Теорема об изменении кинетической энергии точки в дифференциальной форме
Дифференциал кинетической энергии точки равен сумма элементарных работ всех действующих на точку сил:
.
Проинтегрировав обе части этого уравнения вдоль траектории движения точки от положения M1 до M2, получим теорему в интегральной форме.
Теорема об изменении кинетической энергии точки
Изменение кинетической энергии материальной точки, при переходе ее из начального положения M1 в конечное положение M2, равно сумме работ всех сил, приложенных к точке на этом перемещении:
.
Силовые поля и потенциальная энергия
1. Работа сил стационарного поля при перемещении точки из положения M1 в положение M2 зависит только от начального положения M1, конечного положения M2, и формы траектории, но не зависит от закона движения точки.
2. Работа, совершенная полем при перемещении точки из положения M1 в M2 равна по модулю и обратна по величине работе, совершенной полем при перемещении точки из M2 в M1 при перемещении по той же траектории:
.
Для нестационарных полей эти свойства на выполняются.
Примеры стационарных полей: поле силы тяжести на поверхности Земли; электростатическое поле от неподвижно закрепленного заряда; поле силы упругости пружины, один конец которой закреплен.
Потенциальное силовое поле – это стационарное силовое поле, работа сил которого зависит только от начального M1 и конечного M2 положений точки, и не зависит от формы ее траектории. Потенциальное силовое поле также называют консервативным.
В потенциальном поле существует такая функция, через которую можно выразить вектор силы , действующей на точку.
Силовая функция – это функция, зависящая от координат точки ( x, y, z ) , через которую выражаются проекции силы потенциального поля на оси координат:
.
Отсюда следует, что сила не изменится, если к силовой функции прибавить постоянную. Таким образом, силовая функция определена с точностью до произвольной постоянной.
В потенциальном поле элементарная работа является дифференциалом от силовой функции:
.
Работа при конечном перемещении из точки в точку равна разности силовой функции в этих точках:
.
Таким образом, в потенциальном поле, работа сил поля не зависит от формы траектории. На замкнутом перемещении работа равна 0. Для более наглядной физической интерпретации, вводят понятие потенциальной энергии. Она равна, с точностью до произвольной постоянной, силовой функции, взятой с обратным знаком.
Потенциальная энергия П – это работа, которую нужно совершить при перемещении точки в потенциальном поле из данного положения в произвольным образом выбранное нулевое положение.
Так, для поля деформации, в качестве нулевого положения обычно принимают не деформированное положение; для гравитационного и электростатических полей за нулевое выбирают положение, бесконечно удаленное от тела или заряда. Для силы тяжести в поле Земли принимают любое, удобное для расчета положение. Таким образом, потенциальная энергия равна силовой функции, взятой с обратным знаком плюс постоянная, зависящая от выбора нулевого положения:
.
Пусть – нулевое положение. Тогда
;
.
Работа сил поля при перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий: .
Эквипотенциальные поверхности – это поверхности равного потенциала:
.
Сила направлена перпендикулярно эквипотенциальной поверхности.
Закон сохранения механической энергии
Если точка находится в потенциальном поле, то сумма ее кинетической и потенциальной энергий является постоянной:
.
Если на точку действуют несколько сил от разных потенциальных полей, то в качестве потенциальной энергии нужно взять сумму потенциальных энергий от каждого силового поля:
.
Основные виды потенциальных полей
В поле силы тяжести, потенциальная энергия зависит от высоты. Направив ось z вертикально вверх, получим: .
Поле силы упругости пружины. В этом поле, потенциальная энергия зависит от деформации λ пружины:
.
В качестве нулевого положения выбирают положение без деформации: λ = 0 .
Сила гравитационного притяжения и космические скорости
Между любыми двумя точками массами m 1 и m 2 , действует сила всемирного тяготения. Так, на точку 2 действует сила притяжения со стороны точки 1:
,
направленная вдоль прямой, проходящей через точку 1. Здесь r – расстояние между точками; Н·м 2 /кг 2 – гравитационная постоянная.
В результате притяжения, обе точки получают ускорения и движутся друг относительно друга. Мы рассмотрим более простой, но важный случай, когда масса M = m 1 одного из тел намного больше массы m = m 2 второго тела. Тогда точка с меньшей массой практически не оказывает влияния на движение более массивной точки. Выберем начало инерциальной системы координат в точке 1. Тогда силу гравитационного притяжения можно рассматривать как центральную силу и представить ее в векторном виде:
(П1) .
Потенциальная энергия точки 2:
(П2) .
Здесь нулевое положение выбрано на бесконечности: .
Формулы (П1) и (П2) справедливы, если объект 1 является шаром с плотностью, зависящей только от расстояния r до его центра. Пусть R – радиус такого шара. Тогда в формулах (П1) и (П2) r – это расстояние от центра шара 1 до точки 2. Они справедливы при .
Эти формулы можно использовать при расчете движения спутников вокруг Земли. Поскольку Земля вращается вокруг своей оси, то ее форма является эллипсоидом. Но в первом приближении Землю можно считать шаром радиуса R = 6371 км. Из таких допущений можно оценить космические скорости, необходимые для выведения летательных аппаратов на космические орбиты.
Первая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на круговую орбиту. Она равна км/с. Если у тела первая космическая скорость, то оно может вращаться по круговой орбите, не падая на Землю, то есть стать ее спутником.
Вторая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на параболическую орбиту. Она равна км/с. Если у тела скорость больше второй космической, то ее траекторией является гипербола, и, при отсутствии помех, оно будет удаляться от Земли и никогда не вернется назад.
Однако Солнце является той преградой, которая не даст спутнику со второй космической скоростью удалиться на бесконечное расстояние. Чтобы тело могло покинуть пределы солнечной системы, ему необходимо сообщить третью космическую скорость км/с.
Использованная литература:
А. А. Яблонский, Курс теоретической механики, часть II, динамика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
Автор: Олег Одинцов . Опубликовано: 11-12-2019
Динамика в физике — основные понятия, формулы и определения с примерами
Содержание:
Динамика (от греч. — сильный, сила) — раздел механики, в котором изучается движение материальных тел под действием приложенных к ним сил.
В механике, кроме кинематического описания движений, возникает необходимость выявления причин изменения состояния движения. Для этого рассматривают механическое движение тела, учитывая действие других тел, т. е. движение под действием приложенных к нему сил. Этот раздел механики называют динамикой.
Взаимодействие тел и первый закон Ньютона
Вам уже известно, что окружающие нас тела взаимодействуют друг с другом. Каким закономерностям подчиняются взаимодействия тел? Как они влияют на механическое движение тел? Ответы на эти вопросы дает раздел физики динамика. 
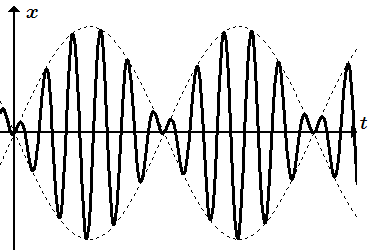
Рассмотрим взаимодействие стального шарика с различными телами (рис. 98, а, б, в). Шарик находится в состоянии покоя.
С какими телами взаимодействует шарик в случае а? С Землей и опорой.
Количественной мерой взаимодействия, как вам известно, является сила. Земля притягивает шарик силой тяжести 
Действующие силы компенсируют друг друга 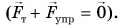 Шарик находится в состоянии покоя относительно опоры.
Шарик находится в состоянии покоя относительно опоры.
В случае б сила упругости действует на шарик со стороны растянутой пружины. В обоих случаях шарик взаимодействовал с двумя телами: Землей и опорой (рис. 98, а), с Землей и пружиной (рис. 98, б). Значит, число сил, приложенных к телу, равно числу тел, с которыми данное тело взаимодействует.
В земных условиях любое тело взаимодействует хотя бы с одним телом (Землей).
В случае в на шарик действуют три тела: Земля с силой  нить с силой
нить с силой  и магнит с силой
и магнит с силой  Сумма всех сил, приложенных к шарику, как и в случаях а и б, равна нулю:
Сумма всех сил, приложенных к шарику, как и в случаях а и б, равна нулю:  Шарик находится в состоянии покоя относительно Земли.
Шарик находится в состоянии покоя относительно Земли.

А при каком условии шарик сохранял бы состояние равномерного прямолинейного движения? Повседневный опыт говорит: чтобы тело двигалось равномерно, его нужно тянуть или толкать (рис. 99), прилагая силу. Прекратится действие силы — движущееся тело рано или поздно остановится. Так считали и известные ученые древности, например Аристотель. Опровергнуть эти представления удалось в первой половине XVII в. итальянскому ученому Галилео Галилею.
Проведем опыт, подобный опытам Галилея. Пустим с некоторой высоты железный шарик по наклонному желобу (рис. 100). Шарик скатывается с желоба и продолжает движение по горизонтальной поверхности стола, покрытого тканью (рис. 100, а), картоном (рис. 100, б), стеклом (рис. 100, в).
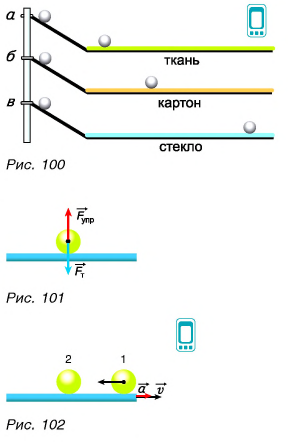
Опыт показывает, что по стеклу шарик прокатится дальше всего. Почему? Потому что в этом случае трение было наименьшим. А если бы трения не было совсем? На шарик действовали бы только две силы: сила тяжести  и сила упругости
и сила упругости  (рис. 101), компенсирующие друг друга. Шарик двигался бы с постоянной скоростью как угодно долго.
(рис. 101), компенсирующие друг друга. Шарик двигался бы с постоянной скоростью как угодно долго.
Галилей сделал вывод: скорость движения тела остается постоянной, если на тело не действуют силы или силы действуют, но при этом компенсируют друг друга. Такое движение называют движением но инерции.
Развивая идеи Галилея, в 1687 г. Исаак Ньютон сформулировал утверждение, получившее название первый закон Ньютона (или за кон инерции): всякое тело находится в состоянии покоя или равномерного прямолинейного движения до тех пор, пока на него не подействуют силы.
В первом законе Ньютона заключена важнейшая идея механики. Действовать на тело силой необходимо не для того, чтобы сохранить его скорость постоянной, а для того, чтобы изменить ее. Сила нужна как для изменения модуля скорости, так и для изменения ее направления.
Мы знаем, что скорость тела зависит от системы отсчета. В любой ли системе отсчета выполняется первый закон Ньютона?
Приведем в ускоренное движение опору, на которой покоится шарик (см. рис. 101). Относительно опоры шарик начнет двигаться ускоренно в противоположную сторону (от положения 1 к положению 2) (рис. 102). Но ведь на шарик действовали те же силы  и
и  которые по-прежнему компенсировали друг друга:
которые по-прежнему компенсировали друг друга: 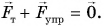
Какая же сила вызвала движение шарика? Такой силы нет. Просто первый закон Ньютона выполняется в системе отсчета, покоящейся относительно Земли, но не выполняется в системе отсчета, связанной с ускоренно движущейся опорой.
Системы отсчета, относительно которых тела покоятся или движутся равномерно и прямолинейно, когда на них не действуют силы (или силы скомпенсированы), называются инерциальными.
Значит, система отсчета, связанная с Землей, является инерциальной системой отсчета, а система отсчета, связанная с ускоренно движущейся относительно Земли опорой — неинерциальной. Существование систем отсчета, близких к инерциальным, — важнейший, проверенный экспериментально, факт. Поэтому первому закону Ньютона дают следующую формулировку: существуют системы отсчета, относительно которых любое тело движется равномерно и прямолинейно, если на него не действуют силы или действие сил скомпенсировано.
Для любознательных:
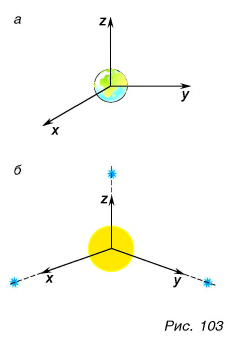
Опыты показывают, что систему отсчета, связанную с Землей, — геоцентрическую систему (рис. 103, а) — можно считать инерциальной только приближенно. Гораздо более близка к инерциальной гелиоцентрическая система отсчета. Ее начало координат связано с Солнцем, а оси координат направлены на далекие звезды (рис. 103, б).
Любая система отсчета, движущаяся относительно инерциальной системы поступательно, равномерно и прямолинейно, также будет инерциальной. Если же система отсчета движется ускоренно или вращается относительно инерциальной системы, то она будет неинерциальной. Например, неинерциальные системы отсчета — это системы, связанные с ракетой на участке разгона, с тормозящим поездом, вращающейся каруселью и т. п.
Мы не замечаем неинерциальности геоцентрической системы из-за того, что Земля вращается вокруг своей оси медленно (один оборот за 24 ч).
Главные выводы:
- Количественной мерой взаимодействия является сила.
- Если все силы, действующие на тело, скомпенсированы или их нет, то тело находится в состоянии покоя или в состоянии равномерного прямолинейного движения.
- Равномерное движение тела при действии на него скомпенсированных сил называется движением по инерции.
- Система отсчета называется инерциальной, если тела, на которые не действуют силы, покоятся или движутся относительно нее равномерно и прямолинейно.
- Первый закон Ньютона в современной формулировке: «Существуют системы отсчета, относительно которых любое тело движется равномерно и прямолинейно, если на него не действуют силы или действие сил скомпенсировано».
Масса
Мы часто вместо слова «масса» говорим «вес», а слова «массивный» и «тяжелый» считаем синонимами. С точки зрения физики это грубая ошибка.
Представим, что на космической станции, построенной на Луне, проходят соревнования по подъему штанги. На них любой из вас смог бы поднять стокилограммовую штангу! Легче ли штанга на Луне, чем на Земле? Да. Меньше ли на Луне масса штанги? Нет. Так что такое масса? Каковы ее свойства?
Как измеряют массу
1. Измерение массы тел путем взвешивания
Существуют различные типы весов:
- • рычажные (рис. 104, а, б);
- • пружинные (рис. 104, в, г);
- • электронные (рис. 104, д).
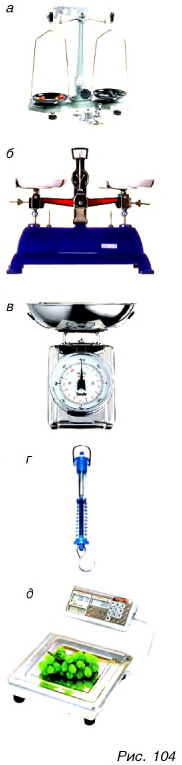
Во всех случаях весы — прибор для определения массы тела по действующей на него силе тяжести.
Как вы знаете, сила тяжести прямо пропорциональна массе тела:

Рычажные весы с равными плечами находятся в равновесии, если силы тяжести взвешиваемого тела и набора гирь будут равны:  т. е. при
т. е. при  Значит, результат взвешивания тела на рычажных весах не зависит от значения коэффициента g и будет одним и тем же на Земле, Луне и любой планете.
Значит, результат взвешивания тела на рычажных весах не зависит от значения коэффициента g и будет одним и тем же на Земле, Луне и любой планете.
А как измерить массу тела на пружинных весах? Их показания пропорциональны силе тяжести. Сила тяжести на Луне примерно в 6 раз меньше, чем на Земле. Во столько же раз меньше будут и показания пружинных весов.
Чтобы правильно определить массу тела на пружинных весах, нужно провести взвешивание гири-эталона массой  Сравнивая показания пружинных весов для тела и эталона
Сравнивая показания пружинных весов для тела и эталона  и
и  получим:
получим:


Формула (3) выражает массу тела независимо от того, где проводилось взвешивание.
А можно ли найти массу тела, не используя силу тяжести? Можно, сравнивая инертность тел.
2. Сравнение масс по инертности тел
Любое тело обладает свойством двигаться по инерции, т. е. сохранять свою скорость неизменной, если на него не действуют силы (или силы компенсируют друг друга). Однако одни тела легче разогнать (а разогнав, остановить), а другие — труднее. Например, для разгона или остановки нагруженной тележки на нее следует действовать гораздо большей силой, чем па порожнюю. Груженая тележка более инертна.
Как определить, во сколько раз одно тело более инертно, чем другое?
Проведем опыт. Поставим на горизонтальную поверхность две легкие тележки, нагруженные телами 1 и 2 соответственно (рис. 105), способные катиться почти без трения.
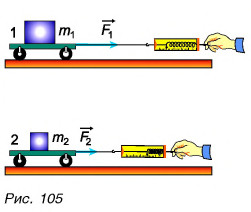
Будем разгонять тележки так, чтобы они двигались с одинаковым ускорением, не обгоняя и не отставая друг от друга. Пусть для этого на тележку 1 пришлось подействовать силой  в три раза большей, чем сила
в три раза большей, чем сила  приложенная к тележке 2.
приложенная к тележке 2.
Значит, тело 1 в три раза инертнее тела 2. Или, другими словами, масса как мера инертности у тела 1 в три раза больше, чем у тела 2.
Современные, очень точные опыты показывают, что сравнение масс тел путем взвешивания и путем сравнения их инертности дают одинаковые результаты.
Напомним еще о двух практически важных свойствах массы:
• общая масса  нескольких тел равна сумме их масс:
нескольких тел равна сумме их масс:

• масса однородного тела объемом  равна:
равна:

где  — плотность вещества, из которого состоит тело.
— плотность вещества, из которого состоит тело.
Для любознательных:
Массу как меру инертности называют инертной массой, а массу, определяемую по силе притяжения тел друг к другу, — гравитационной массой.
Равенство инертной и гравитационной масс неоднократно проверялось на опыте.
Главные выводы:
- Масса тела — мера его инертности.
- Масса тела — мера его гравитационных свойств.
- Масса данного тела на Земле, на Луне, на космической станции и т. д. одинакова.
Второй закон Ньютона — основной закон динамики
Первый закон Ньютона отвечает на вопрос: «Как ведет себя тело, если на него действуют силы, которые компенсируют друг друга?» А что будет с телом, если силы не скомпенсированы? На этот вопрос дает ответ второй закон Ньютона.
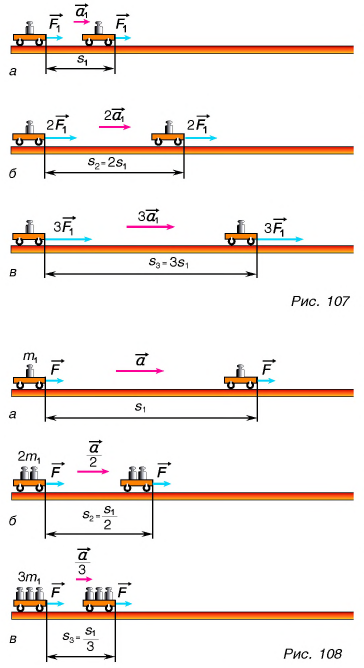
Рассмотрим опыт. Приложим силу  к тележке, находящейся на гладкой горизонтальной поверхности (рис. 107, а). Кроме силы
к тележке, находящейся на гладкой горизонтальной поверхности (рис. 107, а). Кроме силы  на тележку действуют сила тяжести и реакция опоры (на рисунке они не показаны), которые компенсируют друг друга. Силой трения качения можно пренебречь. Поэтому сила
на тележку действуют сила тяжести и реакция опоры (на рисунке они не показаны), которые компенсируют друг друга. Силой трения качения можно пренебречь. Поэтому сила  равна результирующей всех сил, приложенных к тележке. Под действием силы
равна результирующей всех сил, приложенных к тележке. Под действием силы  тележка приобретает ускорение
тележка приобретает ускорение 
Ускорение тележки будем определять по формуле  пройденный путь s измерять рулеткой, время t — секундомером, силу F — динамометром. Как связано ускорение с приложенной к тележке результирующей силой?
пройденный путь s измерять рулеткой, время t — секундомером, силу F — динамометром. Как связано ускорение с приложенной к тележке результирующей силой?
Увеличим силу в два раза  (рис. 107, б). За такое же время t тележка пройдет путь, в 2 раза больший:
(рис. 107, б). За такое же время t тележка пройдет путь, в 2 раза больший:  Значит,
Значит,  т. е. в два раза большая сила сообщает телу в два раза большее ускорение. Продолжив опыты, получим, что при увеличении результирующей силы в
т. е. в два раза большая сила сообщает телу в два раза большее ускорение. Продолжив опыты, получим, что при увеличении результирующей силы в  раза модуль ускорения а увеличится тоже в
раза модуль ускорения а увеличится тоже в  раза. Сделаем вывод.
раза. Сделаем вывод.
Ускорение тела прямо пропорционально результирующей всех сил, приложенных к нему:

А как зависит ускорение от массы тела? Будем теперь силу  прикладывать к телам разных масс (рис. 108, а, б, в). Под действием одной и той же силы тело в 2 раза большей массы приобретет в 2 раза меньшее ускорение. Ускоряя тела в
прикладывать к телам разных масс (рис. 108, а, б, в). Под действием одной и той же силы тело в 2 раза большей массы приобретет в 2 раза меньшее ускорение. Ускоряя тела в  раза большей массы, мы увидим, что модуль ускорения в
раза большей массы, мы увидим, что модуль ускорения в  раза уменьшится.
раза уменьшится.
Модули ускорений, приобретаемых телами под действием одинаковых сил, обратно пропорциональны массам этих тел:

А как направлено ускорение? В нашем опыте направления ускорения  и силы
и силы  совпадали (рис. 108). Рассмотрим еще два примера.
совпадали (рис. 108). Рассмотрим еще два примера.
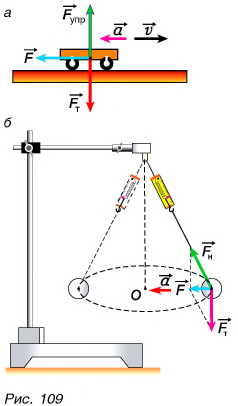
- К тележке приложили силу
 направленную против ее скорости (рис. 109, а). Скорость тележки будет уменьшаться, и ее ускорение будет направлено противоположно скорости, но так же, как и результирующая сила
направленную против ее скорости (рис. 109, а). Скорость тележки будет уменьшаться, и ее ускорение будет направлено противоположно скорости, но так же, как и результирующая сила - Шарик, подвешенный на нити, движется по окружности (рис. 109, б). Ускорение шарика направлено к ее центру О. Опыт показывает, что и в этом случае направления ускорения и результирующей всех сил, приложенных к телу (силы тяжести и силы натяжения нити ), совпадают.
 направленную против ее скорости
направленную против ее скорости  (рис. 109, а). Скорость тележки будет уменьшаться, и ее ускорение
(рис. 109, а). Скорость тележки будет уменьшаться, и ее ускорение  будет направлено противоположно скорости, но так же, как и результирующая сила
будет направлено противоположно скорости, но так же, как и результирующая сила 
 и результирующей
и результирующей  всех сил, приложенных к телу (силы тяжести
всех сил, приложенных к телу (силы тяжести  и силы натяжения нити
и силы натяжения нити  ), совпадают.
), совпадают.В итоге приходим к выводу.
Ускорение тела прямо пропорционально результирующей всех сил, приложенных к нему, обратно пропорционально массе тела и направлено так же, как результирующая сила:

Это основной закон динамики — второй закон Ньютона. Из формулы (3) следует, что направления ускорения  и результирующей силы
и результирующей силы  совпадают.
совпадают.
Запишем второй закон Ньютона в виде:

В соответствии с формулой (4) определяется единица силы в СИ — ньютон (Н).
1 Н — сила, под действием которой тело массой 1 кг приобретает ускорение 
В каких системах отсчета выполняется второй закон Ньютона? В § 15 мы выяснили, что если система неинерциальна, то при результирующей  ускорение тела
ускорение тела  Но согласно второму закону Ньютона при
Но согласно второму закону Ньютона при  ускорение
ускорение  должно быть равно нулю. Значит, второй закон Ньютона выполняется только в инерциальных системах отсчета.
должно быть равно нулю. Значит, второй закон Ньютона выполняется только в инерциальных системах отсчета.
А как применять формулу (4), если тело нельзя рассматривать как материальную точку? В таких случаях под ускорением  следует понимать ускорение точки, называемой центром тяжести этого тела. Понятие «центр тяжести» мы рассмотрим в следующем разделе.
следует понимать ускорение точки, называемой центром тяжести этого тела. Понятие «центр тяжести» мы рассмотрим в следующем разделе.
Главные выводы:
- Ускорение тела прямо пропорционально результирующей всех сил, действующих на него, и обратно пропорционально массе тела.
- Ускорение тела направлено так же, как результирующая всех приложенных к нему сил.
- Единица силы в СИ — 1 ньютон. Это сила, под действием которой тело массой 1 кг движется с ускорением
- Второй закон Ньютона выполняется только в инерциальных системах отсчета.

Пример №1
Сани массой  тянут по горизонтальному участку пути, прикладывая силу
тянут по горизонтальному участку пути, прикладывая силу  под углом
под углом  к горизонту. Модуль силы
к горизонту. Модуль силы  Модуль силы трения скольжения
Модуль силы трения скольжения  Определите ускорение саней. Примите
Определите ускорение саней. Примите 

Решение
Сделаем рисунок к задаче (рис. 110). 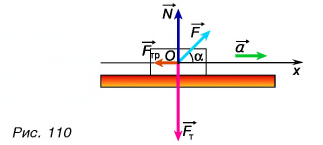
К саням приложены четыре силы: сила тяжести  сила реакции опоры
сила реакции опоры  сила трения
сила трения  и сила
и сила  По второму закону Ньютона:
По второму закону Ньютона:

В проекции на ось Ох уравнение (1) примет вид:

где 
Тогда из уравнения (2) следует:

Ответ: 
Пример №2
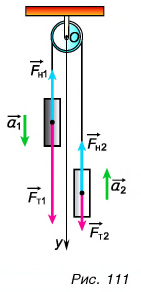
Два цилиндра — стальной и алюминиевый — одинакового объема подвешены к концам нити, перекинутой через неподвижный блок. Какой путь пройдет каждый цилиндр за время  Силами сопротивления пренебречь. Блок считать невесомым, нить — невесомой и нерастяжимой. Принять
Силами сопротивления пренебречь. Блок считать невесомым, нить — невесомой и нерастяжимой. Принять 

Решение
Сделаем рисунок к данной задаче (рис. 111).
На каждую гирю действуют сила тяжести  и сила натяжения нити
и сила натяжения нити 
Согласно второму закону Ньютона:
Модули сил тяжести  где
где  — масса груза. Так как нить нерастяжима,
— масса груза. Так как нить нерастяжима, 
Так как блок и нити невесомы, 
Запишем уравнения (1) и (2) в проекции на вертикальную ось Оу (см. рис. 111):

Вычтем из уравнения (3) уравнение (4), получим:


Путь, пройденный каждым из цилиндров:
Ответ: 
Третий закон Ньютона. Принцип относительности Галилея
Второй закон Ньютона объясняет, какое ускорение возникает при движении тела; на которое действуют другие тела. А действует ли при этом данное тело на эти тела?
Рассмотрим несколько примеров.
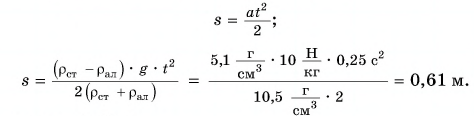
Земля притягивает кубик силой  (рис. 115, а). Заряженный шар 1 отталкивает такой же заряженный шар 2 силой
(рис. 115, а). Заряженный шар 1 отталкивает такой же заряженный шар 2 силой  (рис. 115, б). Магнит притягивает железный брусок силой
(рис. 115, б). Магнит притягивает железный брусок силой  (рис. 115, в). Действует ли при этом кубик на Землю? Заряженный шар 2 на заряженный шар 1? Железный брусок па магнит? Если действует, то с какой силой?
(рис. 115, в). Действует ли при этом кубик на Землю? Заряженный шар 2 на заряженный шар 1? Железный брусок па магнит? Если действует, то с какой силой?
Ответ очевиден лишь для случая, представленного на рисунке 115, б. Заряженные шары 1 и 2 «равноправны». Модули сил  равны, а их направления противоположны, т. е.
равны, а их направления противоположны, т. е.  А если тела отличаются друг от друга (рис. 115, в)?
А если тела отличаются друг от друга (рис. 115, в)?
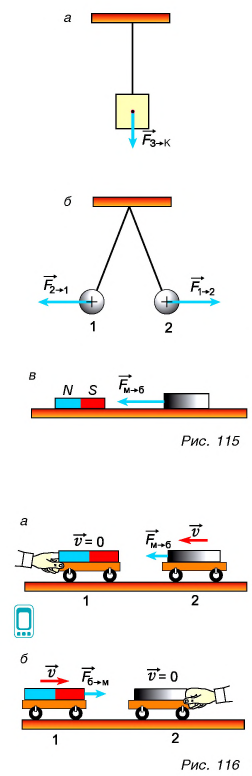
Проведем опыт. Поместим магнит на тележку 1, а железный брусок — на тележку 2 (рис. 116).
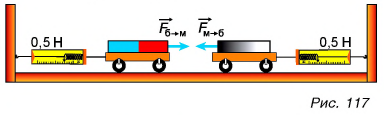
Будем удерживать тележку 1 с магнитом. Тележка 2 с бруском (рис. 116, а) поедет в сторону магнита. Удержим теперь тележку 2 (рис. 116, б), а тележку 1 с магнитом отпустим. Тележка с магнитом поедет в сторону бруска. Значит, и железный брусок притягивает к себе магнит.
Одинаковы ли модули сил, с которыми магнит и брусок притягивают друг друга? Это можно выяснить с помощью опытов. Равенство показаний динамометров (рис. 117) говорит о том, что модули этих сил равны: 
Результаты данных опытов не случайны. Механическое действие тел друг на друга всегда взаимно. Одностороннего действия не бывает. Существует лишь взаимодействие. При этом силы, с которыми тела действуют друг на друга, имеют равные модули, противоположные направления и лежат на одной прямой:
Это утверждение носит название третьего закона Ньютона. Он выполняется для тел любых масс, размеров, формы и состава вещества.
Что еще надо знать о силах взаимодействия?
Силы взаимодействия приложены к разным телам (  — к шару 2,
— к шару 2,  — к шару 1) (см. рис. 115, б). Поэтому они не могут компенсировать (уравновесить) друг друга.
— к шару 1) (см. рис. 115, б). Поэтому они не могут компенсировать (уравновесить) друг друга.
Силы взаимодействия всегда имеют одну и ту же природу (например, обе являются электрическими силами или обе — гравитационными и т. д.).
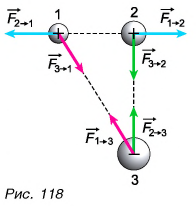
Если одновременно взаимодействует несколько тел (рис. 118), то равенство 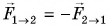 выполняется для каждой пары тел.
выполняется для каждой пары тел.
Третий закон Ньютона объясняет многие явления повседневной жизни. Так, для прыжка вверх (рис. 119) спортсмен отталкивает опору силой  направленной вниз. Ответная (противодействующая) сила
направленной вниз. Ответная (противодействующая) сила  придает прыгуну направленное вверх ускорение.
придает прыгуну направленное вверх ускорение.
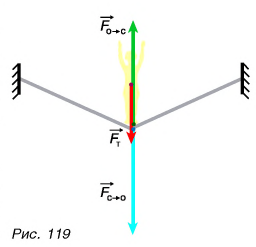
Человек при ходьбе, автомобиль при движении отталкиваются от дорожного покрытия. В ответ на это дорожное покрытие действует па них с силой, имеющей горизонтальную составляющую, направленную вперед. Лодка (рис. 120), корабль отталкиваются от воды, самолет — от воздуха (или от реактивной струи).
Мы рассмотрели законы Ньютона — основные законы механики.
Рассмотрим еще одно важное положение механики — принцип относительности Галилея.
Мы познакомились с понятиями «инерциальная система отсчета» и «неинерциальная система отсчета». Мы узнали, что если на тело не действуют силы (или действуют, но компенсируют друг друга), то:
- относительно инерциальных систем это тело покоится или движется равномерно и прямолинейно;
- относительно неинерциальных — движется с ускорением.
Значит, в инерциальных и неинерциальных системах механические явления происходят по-разному. Эти системы «неравноправны». А равноправны ли между собой инерциальные системы?
Опыты показывают, что относительно поезда, самолета, автобуса и т. д., имеющих в системе отсчета «Земля» постоянную скорость, любое тело ведет себя точно так же, как и относительно Земли.
На основе опытов был сделан вывод: во всех инерциальных системах отсчета механические явления при одинаковых условиях происходят одинаково.
Данное утверждение выражает равноправие всех инерциальных систем в механике. Оно носит название «принцип относительности Галилея».
Этот принцип можно сформулировать и иначе: «Никакими механическими опытами, проводимыми внутри любой инерциальной системы, нельзя установить, покоится она или движется».
Главные выводы:
- Действие тел друг на друга всегда взаимно.
- Силы взаимодействия двух тел имеют равные модули, направлены по одной прямой в противоположные стороны и имеют одинаковую природу (третий закон Ньютона).
- Силы взаимодействия двух тел не компенсируют друг друга, так как они приложены к разным телам.
- Во всех инерциальных системах все механические явления при одинаковых условиях происходят одинаковым образом (принцип относительности Галилея).
Деформация тел. Сила упругости. Закон Гука
До сих пор мы рассматривали модель абсолютно твердого тела. Размеры и форма тела в процессе его движения и взаимодействия не изменялись. Однако в ряде явлений происходит деформация тела, т. е. изменение его размеров, формы. Какими закономерностями описываются деформации?
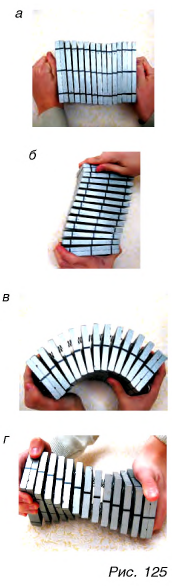
Деформация происходит в результате перемещения одних частей тела относительно других. Па рисунке 125, а, б, в, г на модели показаны различные виды деформаций: сжатие, сдвиг, изгиб, кручение.
При сжатии (рис. 125, а) и растяжении изменяются расстояния между слоями. При сдвиге (рис. 125, б) слои смещаются относительно друг друга. Деформация изгиба (рис. 125, в) является комбинацией сжатия и растяжения. При деформации кручения (рис. 125, г) слои поворачиваются относительно друг друга.
Деформации возникают под действием приложенных к телу сил (рис. 125). Что будет, если действие сил прекратится?

Проведем опыт. Изогнем ластик (рис. 126, а). Он деформируется. Прекратим воздействие. Деформация исчезнет.
Если размеры и форма тела полностью восстанавливаются после прекращения действия силы, то деформацию называют упругой.
Деформируем теперь кусок пластилина (рис. 126, б). После прекращения действия силы его форма не восстановилась. Такую деформацию называют неупругой или пластической.

Пластической деформации подвергают металл при прокатке, ковке (рис. 127), штамповке и т. д.
Характер деформации зависит не только от вещества, из которого состоит тело, но и от того, насколько велика внешняя сила, как долго она действует, а также от температуры тела. Например, если железную пластину немного изогнуть и отпустить, она восстановит свою форму. Однако если ее закрепить в деформированном состоянии на длительное время, то после снятия внешней силы восстановление будет неполным.
Если же тело нагрето до высокой температуры, то деформация будет пластической даже под действием кратковременной силы (рис. 127).
Рассмотрим подробнее наиболее простую деформацию: упругое растяжение. Как величина деформации тела зависит от приложенной к нему силы?
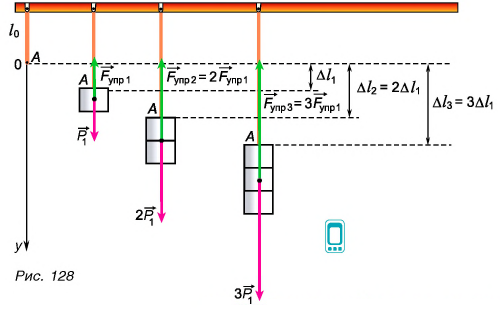
Проведем опыт. Закрепим один конец резинового шнура, а к другому подвесим груз (рис. 128). Под действием деформирующей силы  (веса груза) шнур растянется. Его длина станет больше начальной на величину
(веса груза) шнур растянется. Его длина станет больше начальной на величину  Будем увеличивать деформирующую силу, подвешивая два, три и т. д. одинаковых груза:
Будем увеличивать деформирующую силу, подвешивая два, три и т. д. одинаковых груза: 
Удлинение шнура  возрастает во столько же раз.
возрастает во столько же раз.
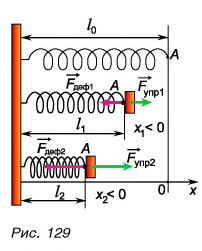
Проведем аналогичные опыты с пружиной (рис. 129). Ее можно как растягивать, так и сжимать. Результаты будут аналогичны: при упругих деформациях сжатия и растяжения изменение длины тела прямо пропорционально деформирующей силе:

Как при растяжении шнура, так и при сжатии пружины в ответ па действие деформирующей силы  возникала противодействующая ей сила упругости
возникала противодействующая ей сила упругости  (рис. 128 и 129).
(рис. 128 и 129).
К чему приложена упругая сила? Куда она направлена? Каким закономерностям она подчиняется? Какова ее природа?
Рисунки 128 и 129 показывают: сила упругости приложена к телу, которое вызвало деформацию.
Согласно третьему закону Ньютона

Сила упругости направлена противоположно деформирующей силе, а их модули равны.
Из формул (1) и (2) следует:

где  — постоянный коэффициент. Значит, при упругих деформациях сжатия и растяжения модуль силы упругости прямо пропорционален изменению длины тела.
— постоянный коэффициент. Значит, при упругих деформациях сжатия и растяжения модуль силы упругости прямо пропорционален изменению длины тела.
Это — закон Гука (установлен английским ученым Робертом Гуком в 1660 г.).
Коэффициент пропорциональности  называется жесткостью тела.
называется жесткостью тела.
Жесткость тела численно равна модулю силы упругости, возникающей при удлинении (или сжатии) тела на единицу длины.
Единица жесткости в СИ — 1 ньютон на метр 
Для любознательных:
Жесткость тела зависит от материала, из которого оно изготовлено, от формы и размеров тела, от его температуры. Жесткость тела постоянного поперечного сечения (шнура, проволоки и т. д.) прямо пропорциональна площади сечения и обратно пропорциональна длине тела.
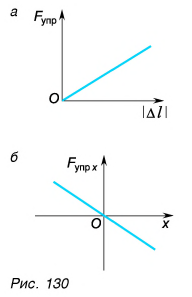
Из рисунков 128 и 129 видно, что и при растяжении, и при сжатии сила упругости направлена противоположно перемещению точки приложения деформирующей силы (точки А). С учетом этого закон Гука записывают в следующем виде:

где  — проекция силы упругости на ось Ох, а х — координата точки А. Начало координат па оси Ох выбрано так, чтобы при
— проекция силы упругости на ось Ох, а х — координата точки А. Начало координат па оси Ох выбрано так, чтобы при  деформация отсутствовала.
деформация отсутствовала.
На рисунке 130, а, б представлены графики зависимости силы упругости от деформации  и от х. Прямолинейность графиков выражает прямую пропорциональную зависимость силы упругости от
и от х. Прямолинейность графиков выражает прямую пропорциональную зависимость силы упругости от  и от х.
и от х.
Не забывайте, что закон Гука, а значит, и формулы (3), (4) выполняются только для упругих деформаций!
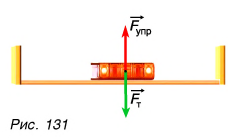
Все окружающие нас тела в той или иной степени деформированы. Хотя эти деформации чаще всего незаметны, связанные с ними силы упругости не малы. Например, сила упругости полки уравновешивает силу тяжести книги (рис. 131), сила упругости рельсов — силу тяжести поезда и т. д. Силу упругости, возникающую в ответ на действие тела на опору, называют силой реакции опоры. Силу упругости растянутой нити, веревки, троса и т. д. — силой натяжения.
Почему при деформации возникают силы упругости? Какова их природа?
Из 7-го класса вам известно, что тела состоят из молекул, которые взаимодействуют друг с другом, и что силы взаимодействия имеют электромагнитное происхождение. Свойства этих сил таковы, что на определенном расстоянии  между молекулами сила их взаимодействия обращается в нуль, при
между молекулами сила их взаимодействия обращается в нуль, при  молекулы отталкивают друг друга, а при
молекулы отталкивают друг друга, а при  — притягивают.
— притягивают.
Поэтому при сжатии тела силы взаимодействия молекул препятствуют его сжатию, а при растяжении — растяжению.
Силы упругости возникают из-за взаимодействия молекул между собой и имеют электромагнитную природу.

И упругие, и пластические свойства тел определяются тем, из каких молекул тела состоят и как расположены молекулы по отношению друг к другу. На рисунке 132 изображены кристаллические решетки алмаза и графита (разновидностей углерода). Различное расположение одних и тех же атомов углерода приводит к резким отличиям свойств данных веществ.
Главные выводы:
- Изменение размеров или формы тела называется деформацией.
- Если после прекращения действия внешних сил размеры и форма тела полностью восстанавливаются, то деформация называется упругой. Если восстанавливаются не полностью, то — пластической.
- Силы упругости направлены противоположно деформирующим силам.
- При упругих деформациях сжатия и растяжения модуль силы упругости прямо пропорционален модулю изменения длины тела:

Пример №3
Под действием пружинного динамометра железный кубик с длиной ребра  движется по гладкой горизонтальной поверхности с постоянным ускорением, модуль которого
движется по гладкой горизонтальной поверхности с постоянным ускорением, модуль которого  Определите удлинение пружины динамометра жесткостью
Определите удлинение пружины динамометра жесткостью 

Решение
Сделаем рисунок к задаче (рис. 133).
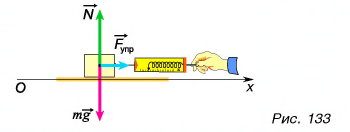
По условию задачи на кубик действуют: сила тяжести  сила реакции
сила реакции  и сила упругости пружины динамометра
и сила упругости пружины динамометра  Трение отсутствует. По второму закону Ньютона:
Трение отсутствует. По второму закону Ньютона:

В проекции на ось Ох:

Масса кубика  где объем кубика
где объем кубика  Тогда
Тогда

Модуль силы упругости пружины динамометра по закону Гука:

Подставив выражения (3) и (4) в выражение (2), получим:
Отсюда 
Ответ: 
Силы трения. Силы сопротивления среды
Согласно первому закону Ньютона для движения с постоянной скоростью силы не нужны. Почему же движущиеся санки, лодка, шайба и т. д. останавливаются, если мы перестаем действовать на них силой? Какие силы препятствуют их движению?
Санки и шайбу останавливает сила трения скольжения у лодку — сила сопротивления среды.
Рассмотрим силу трения скольжения. Она возникает при перемещении одного тела по поверхности другого.
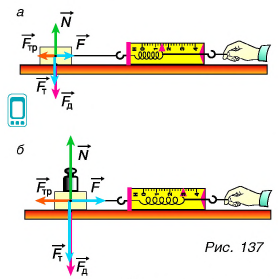
Проведем опыт. С помощью динамометра будем перемещать деревянный брусок по поверхности стола (рис. 137, а). На брусок действуют сила тяжести  сила реакции опоры
сила реакции опоры  компенсирующая силу тяжести, сила упругости пружины динамометра
компенсирующая силу тяжести, сила упругости пружины динамометра  и сила трения
и сила трения  При равномерном перемещении бруска модули сил
При равномерном перемещении бруска модули сил  равны.
равны.
С помощью гири увеличим силу давления  бруска на стол (рис. 137, б). Сила трения тоже возрастает. При увеличении силы давления в
бруска на стол (рис. 137, б). Сила трения тоже возрастает. При увеличении силы давления в  раза показания динамометра F увеличиваются также в
раза показания динамометра F увеличиваются также в  раза. Значит, модуль силы трения скольжения прямо пропорционален модулю силы давления тела на опору:
раза. Значит, модуль силы трения скольжения прямо пропорционален модулю силы давления тела на опору:

где  — коэффициент трения скольжения. Он зависит от свойств соприкасающихся поверхностей, от их шероховатости, от наличия примесей и загрязнений.
— коэффициент трения скольжения. Он зависит от свойств соприкасающихся поверхностей, от их шероховатости, от наличия примесей и загрязнений.
Приведем приближенные значения коэффициентов трения для некоторых материалов (табл. 2).
Таблица 2. Коэффициенты трении скольжения 
Сила давления  действует со стороны бруска на стол, а сила
действует со стороны бруска на стол, а сила  — со стороны стола на брусок. Направления этих сил противоположны (рис. 137), а их модули, по третьему закону Ньютона, равны
— со стороны стола на брусок. Направления этих сил противоположны (рис. 137), а их модули, по третьему закону Ньютона, равны  Поэтому вместо формулы (1) часто используют формулу
Поэтому вместо формулы (1) часто используют формулу

Так как сила  направлена по нормали к поверхности опоры, ее следует называть нормальной реакцией опоры.
направлена по нормали к поверхности опоры, ее следует называть нормальной реакцией опоры.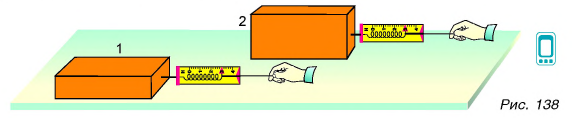
Зависит ли сила трения скольжения от площади соприкосновения тел? Сравним силу трения при двух положениях 1 и 2 бруска (рис. 138). Хотя площадь контакта бруска с доской в положении 2 меньше, показания динамометра почти не изменились. Значит, сила трения практически не зависит от площади соприкосновения тел.
Куда направлена сила трения скольжения?
Опыты, показанные на рисунке 137, свидетельствуют, что сила трения скольжения направлена противоположно скорости движения тела относительно опоры.
Для любознательных:
Отметим, что коэффициент трения скольжения  незначительно зависит от скорости движения тела относительно опоры
незначительно зависит от скорости движения тела относительно опоры  (рис. 139). При решении задач, как правило, принимают
(рис. 139). При решении задач, как правило, принимают 

А может ли сила трения действовать на неподвижное тело? Рассмотрим пример. Шкаф стоит на горизонтальном полу (рис. 140). На него действуют две силы: сила тяжести  и сила реакции опоры
и сила реакции опоры  Они уравновешивают друг друга. Сила трения равна нулю.
Они уравновешивают друг друга. Сила трения равна нулю.
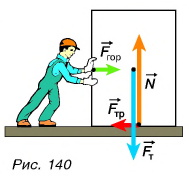
Приложим к шкафу внешнюю силу  параллельную полу. Шкаф по-прежнему в состоянии покоя. Значит, есть сила, компенсирующая силу
параллельную полу. Шкаф по-прежнему в состоянии покоя. Значит, есть сила, компенсирующая силу  Этой силой является сила трения покоя
Этой силой является сила трения покоя 
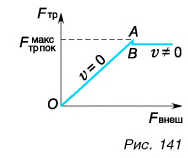
При увеличении внешней силы растет и сила трения покоя (рис. 141), пока шкаф не сдвинется с места. В этот момент сила трения покоя достигает своего максимального значения  Оно, как показывает опыт, прямо пропорционально модулю силы давления
Оно, как показывает опыт, прямо пропорционально модулю силы давления 

Коэффициент трения покоя  как правило, немного больше, чем коэффициент трения скольжения
как правило, немного больше, чем коэффициент трения скольжения  (рис. 141). Поэтому тело труднее сдвинуть с места, чем затем его перемешать.
(рис. 141). Поэтому тело труднее сдвинуть с места, чем затем его перемешать.
Сила трения покоя направлена противоположно горизонтальной составляющей внешней силы, стремящейся сдвинуть тело. Это следует из условия равновесия 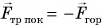 (рис. 140).
(рис. 140).

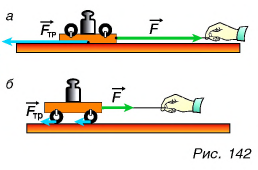
А какой будет сила трения при качении тела?
Опыт показывает, что при замене скольжения качением (рис. 142, а, б) сила трения уменьшается (в десятки раз — для дерева по дереву, почти в 100 раз — для стали по стали и т. д.).
Трение играет очень важную роль в технике и в повседневной жизни. Так, при отсутствии трения любой предмет соскользнул бы с полки при малейшем ее наклоне. И автомобиль, и пешеход не смогли бы ни начать движение, ни остановиться. Поэтому трение часто стремятся увеличить. Обувь и автопокрышки делают рельефными (рис. 143, а), дорогу зимой посыпают песком и т. д.
В то же время трение деталей при работе механизмов (валов в подшипниках, шарнирных соединений и т. д.) является вредным. Оно приводит к износу и нагреванию деталей, к потерям энергии. В таких случаях трение стремятся уменьшить. Трущиеся поверхности шлифуют, на них наносят специальные смазки, скольжение заменяют качением (рис. 143, б).
Рассмотрим движение тела в жидкости или газе. Здесь тоже есть силы, препятствующие движению. Их называют силами сопротивления. Силы сопротивления в жидкости и газе возникают только при движении тела и среды друг относительно друга.
Значит, сила трения покоя в жидкостях и газах равна нулю.
Поэтому человек, который не смог бы сдвинуть с места лежащую на берегу лодку, легко приведет ее в движение в воде.
От чего зависит сила сопротивления? Выяснить это можно на опытах, измеряя по показаниям динамометра силу, с которой поток газа или жидкости действует на тело (рис. 144).
Опыты показывают, что сила сопротивления зависит от следующих факторов.
1. От свойств среды: для данного тела при одной и той же скорости сила сопротивления в воздухе намного меньше, чем в воде, в воде — меньше, чем в сахарном сиропе, и т. д.
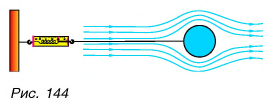
2. От размеров тела: сила сопротивления прямо пропорциональна площади их поперечного сечения (рис. 145).
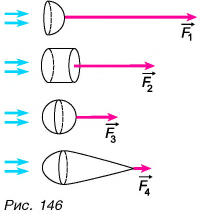
3. От формы тела: у тел на рисунке 146 одинаковая площадь поперечного сечения, но разная форма. Наибольшую силу сопротивления испытывает вогнутая полусфера, а наименьшую — тело каплевидной (обтекаемой) формы.
Обтекаемая форма тела у птиц и рыб сводит до минимума силу сопротивления воздуха или воды и тем самым облегчает их движение. С той же целью обтекаемую форму придают самолетам (рис. 147, а), речным и морским судам, подводным лодкам (рис. 147, б) и т. д.
Чем обусловлена форма парашюта (рис. 147, в)? Объясните самостоятельно.
4. От скорости движения: сила сопротивления возрастает с увеличением скорости движения тела относительно среды. При малых скоростях она растет прямо пропорционально модулю скорости, а при больших — квадрату модуля скорости и даже быстрее.
Силы трения и сопротивления среды (как и силы упругости) определяются взаимодействием молекул и, следовательно, имеют электромагнитную природу. 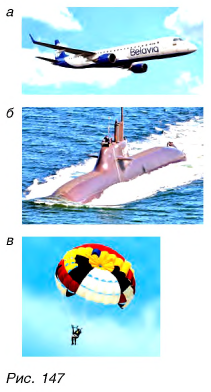
Главные выводы:
- Сила трения скольжения прямо пропорциональна силе давления и направлена против скорости движения тела.
- Коэффициент трения скольжения зависит от материалов и состояния соприкасающихся поверхностей, но практически не зависит от их площади.
- Сила трения качения существенно меньше силы трения скольжения.
- Сила трения покоя возникает при наличии внешней силы, стремящейся вызвать движение тела.
- Силы сопротивления движению тела в газе или жидкости зависят от свойств среды, размеров и формы тела и от скорости его движения.
Пример №4
Автомобиль, имея скорость, модуль которой  тормозит на горизонтальном участке дороги до полной остановки. Коэффициент трения скольжения
тормозит на горизонтальном участке дороги до полной остановки. Коэффициент трения скольжения  Приняв
Приняв  определите время торможения и тормозной путь.
определите время торможения и тормозной путь.
Решение
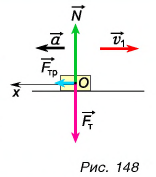
Изобразим силы, действующие на автомобиль(рис. 148).
Сила тяжести  и сила реакции опоры
и сила реакции опоры  компенсируют друг друга. Результирующая всех сил, приложенных к автомобилю, равна силе трения. По второму закону Ньютона
компенсируют друг друга. Результирующая всех сил, приложенных к автомобилю, равна силе трения. По второму закону Ньютона  В проекции на ось Ох:
В проекции на ось Ох: 
Поскольку  модуль ускорения
модуль ускорения  Учитывая, что
Учитывая, что  получим:
получим:  откуда
откуда 
Подставив численные значения, находим: 
Тормозной путь: 
Ответ: 
Движение тела под действием силы тяжести
Законы падения тел интересовали людей с древних времен. Считалось очевидным, что тяжелые тела падают быстрее легких. А что показывает опыт?
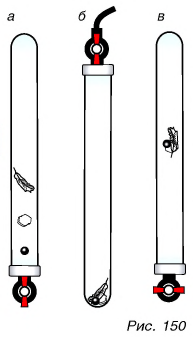
Поместим на дно стеклянной трубки дробинку, кусочек пробки и птичье перышко. Перевернем трубку. Быстрее всех падает дробинка, медленнее всех — перышко (рис. 150, а). Означает ли это, что тяжелые тела надают быстрее легких? Не торопитесь с ответом. Откачаем из трубки воздух (рис. 150, б) и перевернем ее снова (рис. 150, в). Теперь дробинка, пробка и перышко достигают дна одновременно!
Тела падают по-разному не из-за различия масс, а из-за различия действующих на них сил сопротивления воздуха. Такой вывод сделал Галилей еще в XVI в.
Движение тела, на которое действует только сила тяжести, называется свободным падением.
Почему свободно падавшие дробинка, пробка, перышко двигались одинаково?
Найдем ускорение свободного падения  тела массой
тела массой  На него действует только сила тяжести
На него действует только сила тяжести  модуль которой равен
модуль которой равен  По второму закону Ньютона
По второму закону Ньютона  Значит, ускорение всех свободно падающих тел направлено по вертикали вниз, а его модуль
Значит, ускорение всех свободно падающих тел направлено по вертикали вниз, а его модуль

Ускорение свободного падения для всех тел (в данном месте) одинаково.
В чем причина такой удивительной закономерности? В том, что масса является одновременно:
- мерой гравитационных свойств тел (сила тяжести прямо пропорциональна массе);
- мерой инертности тел (ускорение обратно пропорционально массе) (см. § 16).
Именно поэтому в формуле (1) масса  попадает и в числитель, и в знаменатель и сокращается.
попадает и в числитель, и в знаменатель и сокращается.
В 7-м классе коэффициент  мы выражали в
мы выражали в  а согласно формуле (1)
а согласно формуле (1)  измеряется в
измеряется в  В этом нет противоречия. Докажите самостоятельно, что
В этом нет противоречия. Докажите самостоятельно, что 
Для любознательных:
На широте Минска  па экваторе —
па экваторе —  на полюсах —
на полюсах —  Причиной зависимости ускорения свободного падения от географической широты является вращение Земли вокруг своей оси, а также «сплюснутость» Земли у полюсов. При удалении от поверхности Земли ускорение свободного падения постепенно уменьшается.
Причиной зависимости ускорения свободного падения от географической широты является вращение Земли вокруг своей оси, а также «сплюснутость» Земли у полюсов. При удалении от поверхности Земли ускорение свободного падения постепенно уменьшается.
Характеристики движения свободно падающих тел (траектория, время полета и т. д.) зависят от положения точки бросания и от начальной скорости.
Рассмотрим различные движения металлического шарика: а) вертикально вниз (рис. 151); б) горизонтально (рис. 152).
1. Шарик падает с высоты h без начальной скорости  Движение шарика будет прямолинейным, равноускоренным (рис. 151). Проекция скорости
Движение шарика будет прямолинейным, равноускоренным (рис. 151). Проекция скорости  на ось Оу и координата равны:
на ось Оу и координата равны:

Из формул (2) можно определить любую характеристику движения шарика. Например, приравнивая  находим время падения:
находим время падения:  Затем, подставляя t в формулу для
Затем, подставляя t в формулу для  определяем скорость шарика в конце падения:
определяем скорость шарика в конце падения: 
2. Шарик брошен горизонтально. Из рисунка 152 видно, что шарик, брошенный горизонтально, движется по криволинейной траектории ОВ. При этом он участвует одновременно в двух движениях: переметается вправо по горизонтали и снижается по вертикали. 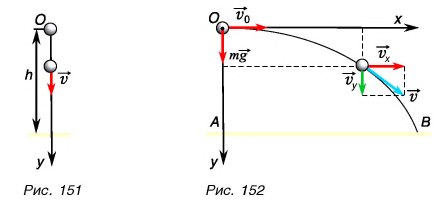
Для описания движения шарика введем две координатные оси (Ох и Оу). Во время полета на шарик действует одна постоянная сила  направленная но оси Оу. Следовательно, проекции ускорения шарика:
направленная но оси Оу. Следовательно, проекции ускорения шарика:

- проекция скорости движения шарика и его координата х изменяются по законам равномерного движения с начальной скоростью
 и его координата х изменяются по законам равномерного движения с начальной скоростью
и его координата х изменяются по законам равномерного движения с начальной скоростью 

- проекция скорости и координата у — но законам равноускоренного движения без начальной скорости. Для них выполняются те же формулы (2), что и для шарика в предыдущем примере.
 и координата у — но законам равноускоренного движения без начальной скорости. Для них выполняются те же формулы (2), что и для шарика в предыдущем примере.
и координата у — но законам равноускоренного движения без начальной скорости. Для них выполняются те же формулы (2), что и для шарика в предыдущем примере.Отсюда следует вывод. Время полета шарика в случаях, изображенных на рисунках 151 и 152, одинаково! Оно равно  и не зависит от начальной скорости.
и не зависит от начальной скорости.
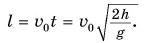
Подтвердим это опытом с помощью установки, показанной на рисунке 153. В результате удара молотком по пластине шарик 1 приобретает горизонтальную начальную скорость  В тот же момент шарик 2 начинает падение по вертикали без начальной скорости. Шарики достигают горизонтальной поверхности одновременно.
В тот же момент шарик 2 начинает падение по вертикали без начальной скорости. Шарики достигают горизонтальной поверхности одновременно.
Дополнительную информацию дают фотографии шариков, сделанные через равные промежутки времени (рис. 153). Они подтверждают, что движение обоих шариков по вертикали было равноускоренным (и одинаковым), а движение шарика 1 но горизонтали — равномерным. 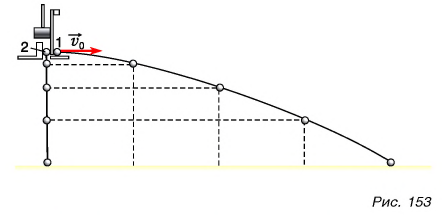
Найдем горизонтальную дальность полета шарика — расстояние  от точки А до места падения шарика — точки В (см. рис. 152). Из рисунка видно, что расстояние равно значению координаты х в момент падения:
от точки А до места падения шарика — точки В (см. рис. 152). Из рисунка видно, что расстояние равно значению координаты х в момент падения:
Скорость движения шарика в каждой точке направлена но касательной к траектории. С помощью формул (2) и (3) находим зависимость модуля скорости от времени:  В конце полета
В конце полета  Докажите это самостоятельно.
Докажите это самостоятельно.
Определим теперь форму траектории. Выразим время t из формулы (3)  и подставим его в выражение для у из формулы (2)
и подставим его в выражение для у из формулы (2)  Находим:
Находим:  (уравнение параболы). Следовательно, траектория движения тела, брошенного горизонтально, есть участок параболы с вершиной в точке бросания.
(уравнение параболы). Следовательно, траектория движения тела, брошенного горизонтально, есть участок параболы с вершиной в точке бросания.
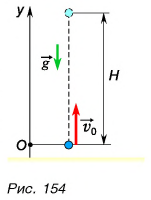
3. Шарик брошен вертикально вверх. Шарик при подъеме движется прямолинейно и равнозамедленно (рис. 154). Проекция скорости движения  и координата у шарика определяются по формулам
и координата у шарика определяются по формулам
Приравнивая  находим время подъема:
находим время подъема:  Приравнивая
Приравнивая  получаем полное время полета:
получаем полное время полета:  Подставляя
Подставляя  в формулу для координаты у из формулы (4), определяем максимальную высоту подъема:
в формулу для координаты у из формулы (4), определяем максимальную высоту подъема: 
Главные выводы:
- Свободным падением называют движение тела, на которое действует только сила тяжести.
- Ускорения всех свободно падающих тел в данном месте одинаковы. Вблизи поверхности Земли модуль ускорения свободного падения постоянен и равен
- Свободно падающее тело участвует одновременно в двух движениях: в равнопеременном по вертикали и в равномерном — по горизонтали.
- Траектория движения тела, брошенного горизонтально, является участком параболы (если сопротивлением воздуха можно пренебречь).

- Заказать решение задач по физике
Пример №5
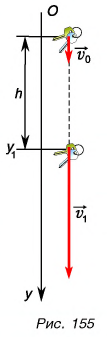
С балкона десятого этажа девочка бросила своему брату связку ключей, придав ей начальную скорость  направленную вертикально вниз. К моменту приземления скорость связки стала равной
направленную вертикально вниз. К моменту приземления скорость связки стала равной  Определите высоту, с которой были сброшены ключи, и время их падения, если
Определите высоту, с которой были сброшены ключи, и время их падения, если  Сопротивление воздуха не учитывать;
Сопротивление воздуха не учитывать; 

Решение
Сделаем рисунок к задаче (рис. 155). Скорость  — время падения. В проекции на ось Оу получим:
— время падения. В проекции на ось Оу получим:  Тогда время падения:
Тогда время падения:
Высота, с которой сброшены ключи, равна значению координаты у в момент их приземления:

Ответ: 
Пример №6
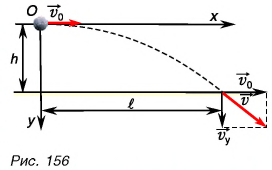
Стоящий на берегу мальчик бросает в озеро камешек. Точка бросания находится на высоте  над поверхностью воды. Начальная скорость камешка
над поверхностью воды. Начальная скорость камешка  направлена горизонтально. Камешек падает в воду на расстоянии
направлена горизонтально. Камешек падает в воду на расстоянии  от берега. Определите время полета камешка, модуль его начальной скорости и модуль скорости, с которой он вошел в воду. Сопротивление воздуха не учитывать;
от берега. Определите время полета камешка, модуль его начальной скорости и модуль скорости, с которой он вошел в воду. Сопротивление воздуха не учитывать; 

Решение
Сделаем рисунок к задаче (рис. 156). Камешек участвует одновременно в двух движениях: равномерном со скоростью  по горизонтами и равноускоренном без начальной скорости по вертикали. В конце полета проекции скорости на оси Ох и Оу и координаты камешка:
по горизонтами и равноускоренном без начальной скорости по вертикали. В конце полета проекции скорости на оси Ох и Оу и координаты камешка:

Отсюда 
Ответ: 
Движение тела, брошенного под углом к горизонту
Рассмотрим движение тела, брошенного под углом к горизонту. Такое движение совершают, например, волейбольный мяч; артиллерийский снаряд и др.
Моделью движения тела, брошенного под углом к горизонту, может служить движение капель, образующих водяную струю. Проведем опыт на установке, показанной на рисунке 157. В открытом сосуде находится подкрашенная вода. Струя образуется с помощью гибкого шланга, снабженного наконечником. Для определения формы траектории капель форму струи можно сравнить с кривыми, заранее нарисованными на листе картона.
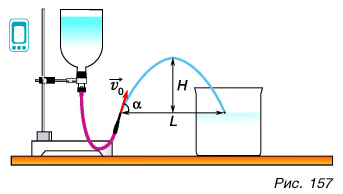
Выясним на опыте, как начальная скорость капель влияет на максимальную высоту Н и дальность L их полета.
Не изменяя угла вылета капель а, увеличим их начальную скорость, поднимая выше сосуд с водой. Высота Н и дальность полета L также будут увеличиваться.
Затем, не изменяя модуль начальной скорости, будем увеличивать угол а вылета капель от 0° до 90°. Сравнение формы струи с кривыми, нарисованными на картоне, укажет на сходство траекторий капель с параболами. Опыт показал, что высота и дальность полета, а также дальность траектории тела, брошенного под углом к горизонту, зависят от угла бросания и от начальной скорости.
А что показывают расчеты? Тело, брошенное под углом к горизонту, участвует одновременно в движении по вертикали и по горизонтали. Если сопротивлением воздуха можно пренебречь, то движение по вертикали будет равнопеременным с начальной скоростью  , а по горизонтали — равномерным со скоростью
, а по горизонтали — равномерным со скоростью  (рис. 158).
(рис. 158).
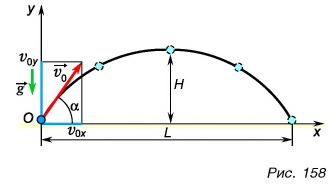
Тогда зависимости от времени для проекций скорости и координат тела на оси  имеют вид:
имеют вид:

Из рисунка 158 видно, что  Поэтому максимальная высота Ну время подъема на эту высоту
Поэтому максимальная высота Ну время подъема на эту высоту  и время полета
и время полета  определяются формулами для равнопеременного движения тела, брошенного вертикально вверх с начальной скоростью
определяются формулами для равнопеременного движения тела, брошенного вертикально вверх с начальной скоростью  :
:

Умножив проекцию скорости  на время полета
на время полета  , получим горизонтальную дальность полета:
, получим горизонтальную дальность полета:

(при выводе формулы (4) использовалось тригонометрическое соотношение  ).
).
Формула (4) показывает: максимальная дальность полета  достигается при
достигается при  (т. е. при угле бросания a = 45°), дальность полета прямо пропорциональна квадрату начальной скорости.
(т. е. при угле бросания a = 45°), дальность полета прямо пропорциональна квадрату начальной скорости.
Для любознательных:
Влияние сопротивления воздуха на движение тел большой массы и малых размеров при небольших скоростях невелико (брошенный камень, спортивное ядро и др.). В других случаях, например для волейбольного мяча, ружейной пули и т. д., сопротивление воздуха весьма существенно. На рисунке 159 изображены траектории реального движения (сплошные линии) и траектории движения без учета сопротивления воздуха (штриховые линии): а) для спортивного ядра; б) для ружейной пули.
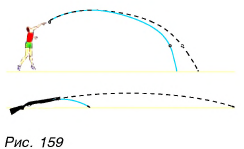
Главные выводы
Если сопротивлением воздуха можно пренебречь, то:
- Тело, брошенное под углом к горизонту, движется с постоянным ускорением по вертикали и равномерно — по горизонтали.
- Траектория движения тела, брошенного под углом к горизонту, является параболой.
Закон всемирного тяготения
В 7-м классе вы узнали о всемирном тяготении. Силами тяготения (гравитационными силами) притягивают друг друга все физические тела: атомы, молекулы, тела обычных размеров, планеты, звезды. Почему мы не замечаем взаимного притяжения окружающих нас предметов? С какой силой Солнце притягивает Землю?
Ответы на такие вопросы дает закон всемирного тяготения, сформулированный И. Ньютоном в 1667 г.
Все тела притягивают друг друга силами, прямо пропорциональными произведению масс этих тел и обратно пропорциональными квадрату расстояния между ними:

где  — массы тел, г — расстояние между телами, G — гравитационная постоянная.
— массы тел, г — расстояние между телами, G — гравитационная постоянная.
Формула (1) дает точное значение F для материальных точек и однородных тел, имеющих форму шара (для них г — расстояние между центрами). Силу тяготения для тел произвольной формы вычисляют, условно разбивая каждое тело на малые части и суммируя силы притяжения частей одного тела к частям другого.
Силы тяготения  (рис. 160) направлены по линии, соединяющей тела, в противоположные стороны. Модули сил равны:
(рис. 160) направлены по линии, соединяющей тела, в противоположные стороны. Модули сил равны:

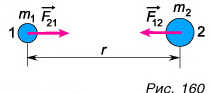
Согласно формуле (1) гравитационная постоянная G численно равна силе притяжения двух материальных точек массами по 1 кг, находящихся на расстоянии 1 м друг от друга.
Значение гравитационной постоянной можно определить экспериментально. Впервые такой опыт был проведен Генри Кавендишем в 1798 г.
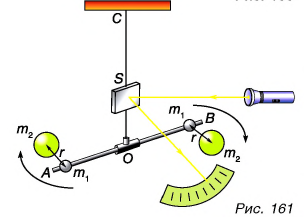
Схема установки представлена па рисунке 161. На стержне АС закреплены два одинаковых свинцовых шарика массой  — 775 г. Стержень подвешен на тонкой упругой металлической нити ОС с легким зеркальцем S. Такое устройство называется крутильными весами.
— 775 г. Стержень подвешен на тонкой упругой металлической нити ОС с легким зеркальцем S. Такое устройство называется крутильными весами.
Притяжение шариков к тяжелым неподвижным свинцовым шарам массами  = 49,5 кг вызывает поворот стержня АВ и закручивание нити ОС. Угол закручивания чрезвычайно мал. Его определяли с помощью луча света, отраженного от зеркальца S, и шкалы. По углу закручивания нити находили силу притяжения.
= 49,5 кг вызывает поворот стержня АВ и закручивание нити ОС. Угол закручивания чрезвычайно мал. Его определяли с помощью луча света, отраженного от зеркальца S, и шкалы. По углу закручивания нити находили силу притяжения.
Зная массы  , расстояние r (см. рис. 161) и модуль силы притяжения F, по формуле (1) можно найти гравитационную постоянную
, расстояние r (см. рис. 161) и модуль силы притяжения F, по формуле (1) можно найти гравитационную постоянную  Современные эксперименты дают значение
Современные эксперименты дают значение 
Значение гравитационной постоянной крайне мало. В связи с этим мала и сила притяжения окружающих нас тел друг к другу. Силы же притяжения этих тел к Земле не малы, потому что масса Земли огромна (около 6 • 10 24 кг).
Закон всемирного тяготения объясняет многое в окружающем мире. С помощью данного закона можно найти ускорение свободного падения тел на разных планетах, определить массу Солнца, Земли и других планет, вычислить скорость движения орбитальной станции и т. д.
Ускорение свободного падения на планетах
Мы знаем, что на поверхности Земли  Чему оно равно на других планетах?
Чему оно равно на других планетах?
Рассмотрим тело массой т, находящееся на расстоянии г от центра планеты массой М и радиусом R (рис. 162). Сила притяжения  тела к планете придает ему ускорение
тела к планете придает ему ускорение  Из закона всемирного тяготения
Из закона всемирного тяготения  Тогда
Тогда 
Так как  , где h — расстояние до поверхности планеты, то:
, где h — расстояние до поверхности планеты, то:

С ростом высоты h ускорение свободного падения убывает. На поверхности планеты, т. е. при h = 0, согласно формуле (2)

Ускорение свободного падения на поверхности планеты прямо пропорционально массе планеты и обратно пропорционально квадрату ее радиуса.
Для любознательных:
Рассмотрите таблицу 3 и сравните ускорение свободного падения на Юпитере и на Луне с ускорением g па Земле.
Таблица 3. Массы, радиусы и ускорения свободного падения для некоторых планет и их спутников
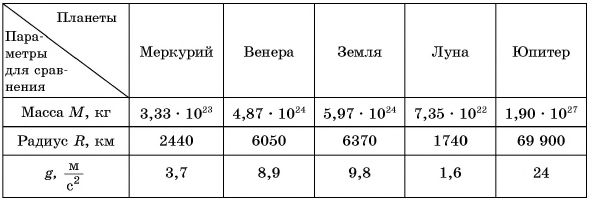
«Взвешивание» Земли. Выразим из формулы (3) массу планеты:

Из формулы (4) следует: зная ускорение свободного падения на поверхности планеты, ее радиус и гравитационную постоянную, можно определить массу планеты. Например, масса Земли

Скорость движения спутника Земли но круговой орбите. За пределами атмосферы силы сопротивления движению спутника отсутствуют. На него действует только сила притяжения к Земле. Поэтому спутник движется с ускорением  . Оно направлено к центру орбиты и является центростремительным ускорением:
. Оно направлено к центру орбиты и является центростремительным ускорением:  (рис. 163).
(рис. 163).
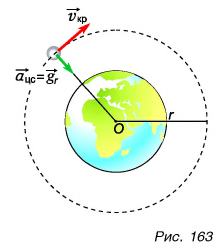
Как мы знаем из кинематики,  , где
, где  — скорость движения спутника по круговой орбите. Следовательно,
— скорость движения спутника по круговой орбите. Следовательно,  откуда
откуда

Скорость движения тела по круговой орбите, близкой к поверхности планеты ( ), называется первой космической скоростью. Из формулы (5) значение первой космической скорости для Земли:
), называется первой космической скоростью. Из формулы (5) значение первой космической скорости для Земли:

Второй космической скоростью  называют наименьшую начальную скорость, приобретя которую тело сможет покинуть планету. Можно доказать, что
называют наименьшую начальную скорость, приобретя которую тело сможет покинуть планету. Можно доказать, что  Для Земли
Для Земли 
Скорость движения но круговой орбите радиусом г можно выразить через массу планеты и радиус орбиты. Подставляя gr из формулы (2) в формулу (5), получим:

Видно, что скорость  уменьшается при увеличении радиуса орбиты.
уменьшается при увеличении радиуса орбиты.
Из формулы (6) можно найти массу М. Значит, спутники планет могут «рассказать» о массе планеты, а планеты — о массе Солнца!
Главные выводы:
- Все тела притягивают друг друга силами, прямо пропорциональными произведению масс этих тел и обратно пропорциональными квадрату расстояния между ними.
- Гравитационная постоянная показывает, с какой силой притягиваются две материальные точки массами по 1 кг на расстоянии 1 м друг от друга.
- Ускорение свободного падения на поверхности планеты прямо пропорционально ее массе и обратно пропорционально квадрату радиуса планеты.
Пример №7
Геостационарным называют спутник, постоянно находящийся над определенной точкой поверхности Земли. Такие спутники широко используются как спутники связи. Определите радиус орбиты геостационарного спутника и его высоту над поверхностью Земли.
Решение
Орбита геостационарного спутника — окружность, лежащая в экваториальной плоскости Земли (рис. 164). Период обращения такого спутника совпадает с периодом вращения Земли вокруг своей оси ( ).
).
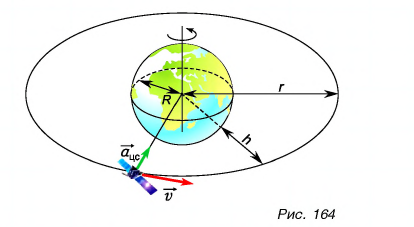
Хотя геостационарный спутник неподвижен относительно Земли, он движется ускоренно относительно инерциальной системы, связанной со звездами. Его центростремительное ускорение (рис. 164)  создано силой тяготения Земли. Приравнивая
создано силой тяготения Земли. Приравнивая  к ускорению свободного падения
к ускорению свободного падения  получим:
получим:
Отсюда радиус орбиты  Подставляя
Подставляя  , радиус Земли
, радиус Земли  , период обращения
, период обращения  , находим:
, находим:  При таком радиусе орбиты расстояние до поверхности Земли составит:
При таком радиусе орбиты расстояние до поверхности Земли составит: 
Ответ: 
Невесомость и перегрузки
Всегда ли вес равен силе тяжести? При каких условиях наступает невесомость? Можно ли испытать состояние невесомости, не отправляясь в космос?
В 7-м классе вы узнали, что вес тела — это сила, с которой тело действует на опору или на подвес из-за притяжения к Земле.
Вес нельзя путать с силой тяжести. Сила тяжести  — это сила тяготения, действующая со стороны Земли на тело. Она приложена к телу в его центре тяжести (рис. 165, а, б).
— это сила тяготения, действующая со стороны Земли на тело. Она приложена к телу в его центре тяжести (рис. 165, а, б).
Вес  — сила, с которой тело действует на опору или на подвес. Он приложен к опоре или к подвесу.
— сила, с которой тело действует на опору или на подвес. Он приложен к опоре или к подвесу.
Вес возникает от того, что под действием силы тяжести тело стремится двигаться вниз, а опора препятствует этому движению. Именно поэтому тело давит на опору силой  . В ответ на силу
. В ответ на силу  опора действует на тело силой реакции
опора действует на тело силой реакции  (рис. 165, а).
(рис. 165, а).
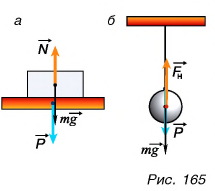
Как связаны между собой вес  и сила тяжести mg?
и сила тяжести mg?
Проведем простой опыт. Положим тело массой т = 1 кг на чашу пружинных весов. Показания весов Р будут равны 9,8 И, т. е. Р = mg. Результат находится в полном согласии с законами Ньютона. По первому закону силы, действующие на покоящееся тело, компенсируют друг друга:

По третьему закону Ньютона

Значит, 
Но всегда ли вес численно равен силе тяжести?
Продолжим опыт в кабине лифта. Если лифт движется равномерно, то показания весов будут такими же, как в состоянии покоя. Вес тела, движущегося равномерно и прямолинейно (как и покоящегося), равен силе тяжести mg.
Пусть теперь кабина лифта движется с ускорением а. При ускорении, направленном вверх, результирующая сила тоже должна быть направлена вверх (рис. 166, а). Значит, N > mg. Но по третьему закону Ньютона модули сил N и Р равны. Следовательно, Р > mg, т. е. вес тела больше силы тяжести.
При ускорении кабины лифта, направленном вниз (рис. 1(56, б), вес тела уменьшается: Р 2 . Тело массой  под воздействием этой же силы получает ускорение 5 м/c 2 .
под воздействием этой же силы получает ускорение 5 м/c 2 .
Если соединить эти тела, с каким ускорением они будут двигаться под воздействием этой силы?
Дано:

Решение: 
Ответ: 
Карта изменения скорости движения тел в динамике:
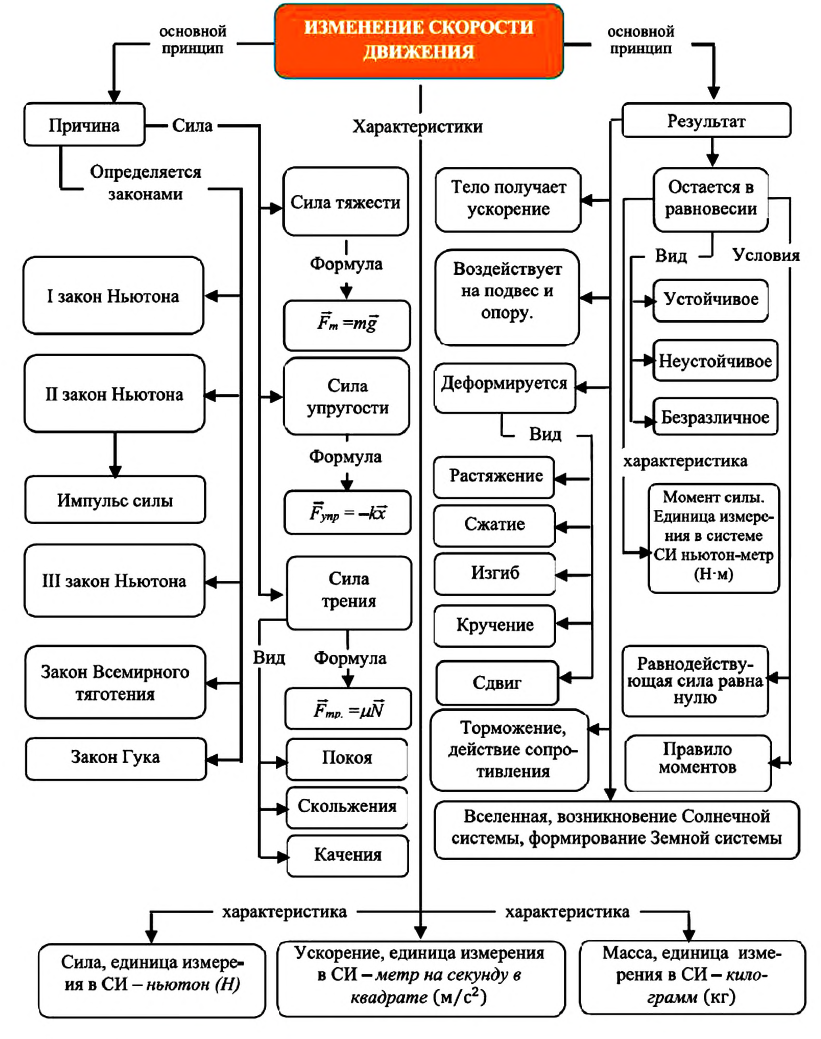
Основная задача динамики
Как вы уже знаете, причиной изменения скорости движения произвольного тела является взаимодействие его с другими телами.
Изучив учебный материал раздела «Кинематика», вы научились различать равномерное и равноускоренное движения, а также записать для них уравнения движения. Однако осталось невыясненным, по какой причине возникает равномерное или равноускоренное движение. Этот вопрос изучается в разделе механики, называемом динамикой.
Динамика (по-гречески dinamikos — «сильный», «мощный») — раздел механики, изучающий причины, определяющие характер движения, а также как эти причины изменяют характер движения.
Основная задача динамики — определить характер движения тела в соответствии с действующей на него силой, или наоборот, по характеру движения тела определить, какая сила действует на него.
Понятие «сила» является основополагающим в динамике. Сила — векторная физическая величина, характеризующая действие одного тела на другое и являющаяся мерой этого действия. Направление вектора силы совпадает с направлением действия тела, а его модуль выражает количественную меру действия.
Говоря об определенной силе, необходимо четко представить:
- на какое тело действует эта сила или к какому телу она приложена?
- к какой точке тела, имеющего определенные размеры, прикладывается эта сила?
- действие какого тела она характеризует?
- вдоль какой линии и куда направлена эта сила?
- чему равен её модуль?
При действии на тело нескольких сил их действие заменяется одной равнодействующей силой.
Равнодействующая сила — это векторная сумма всех сил, действующих на тело:

Например, если на материальную точку действуют две взаимноперпендикулярные силы  и
и  то они могут быть заменены вектором силы
то они могут быть заменены вектором силы  (а). Модуль этой силы:
(а). Модуль этой силы: 
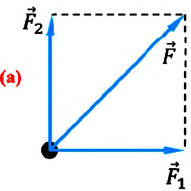
Если же на тело действуют две силы  и
и  под произвольным углом
под произвольным углом  (b), то модуль равнодействующей силы определяется на основании теоремы косинусов:
(b), то модуль равнодействующей силы определяется на основании теоремы косинусов:  Ускорение приобретается телом под действием силы, поэтому в динамике понятие «ускорение» имеет более значимый смысл.
Ускорение приобретается телом под действием силы, поэтому в динамике понятие «ускорение» имеет более значимый смысл.
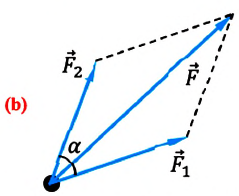
• Приобретение телом ускорения происходит в результате его взаимодействия с другими телами. Известно, что отношение ускорений двух взаимодействующих тел равно обратному отношению их масс:

Это соотношение между ускорениями и массами взаимодействующих тел может быть использовано для определения масс тел. Но для этого сначала следует выбрать единицу массы — принять массу какого-либо тела за эталон. Затем тело, массу которого необходимо определить, привести во взаимодействие с телом, принятым за эталон. Далее, из соотношения между ускорениями и массами этих тел определяется неизвестная масса тела:
Законы динамики
Действие одного тела на другое описывается векторной физической величиной — силой. Сила характеризуется направлением, модулем и точкой приложения.
Действие силы является причиной изменения скорости тела. В отсутствие сил (взаимодействий) скорость тела не изменяется ни по модулю, ни по направлению.
Закон всемирного тяготения: две материальные точки притягиваются друг к другу с силой, прямо пропорциональной произведению их масс  обратно пропорциональной квадрату расстояния r между ними и направленной по соединяющей их прямой:
обратно пропорциональной квадрату расстояния r между ними и направленной по соединяющей их прямой:
Кинематика, описывающая различные типы движения тел, не может ответить на вопрос о причинах возникновения, изменения и прекращения движения, поскольку для этого необходимо рассматривать закономерности механического взаимодействия тел. Закономерности механического взаимодействия тел являются предметом изучения следующего раздела механики — динамики.
Динамика — раздел механики, в котором изучается движение взаимодействующих материальных тел.
Термин «динамика» закрепился за этим разделом механики после выхода в свет в 1743 г. книги Ж. Л. Даламбера «Трактат по динамике».
Действие одного тела на другое в механике проявляется в деформации взаимодействующих тел и в изменении характера их движения.
Сила  — векторная физическая величина, являющаяся мерой воздействия на тело со стороны других тел и полей.
— векторная физическая величина, являющаяся мерой воздействия на тело со стороны других тел и полей.
В результате действия силы (сил) тело приобретает ускорение и деформируется. Любая сила характеризуется модулем (абсолютной величиной), направлением и точкой приложения. Прямая линия, вдоль которой направлена сила, называется линией действия силы.
Единица силы в СИ — ньютон: 
В качестве примеров различных сил можно привести силу всемирного тяготения  силу тяжести (F=mg), силу трения
силу тяжести (F=mg), силу трения  силу упругости
силу упругости 
Для измерения модуля действующей силы с помощью пружинных весов или динамометра используется способность силы вызывать упругие деформации. О модуле силы можно также судить по ускорению, сообщаемому силой телу известной массы.
Опыт показывает, что при одновременном действии на тело нескольких сил  справедлив принцип суперпозиции сил, согласно которому их действие эквивалентно действию одной силы, называемой равнодействующей (результирующей)
справедлив принцип суперпозиции сил, согласно которому их действие эквивалентно действию одной силы, называемой равнодействующей (результирующей)  данных сил. Она является их векторной суммой:
данных сил. Она является их векторной суммой: 
Например, равнодействующая двух сил  равна их векторной сумме (рис. 30):
равна их векторной сумме (рис. 30):
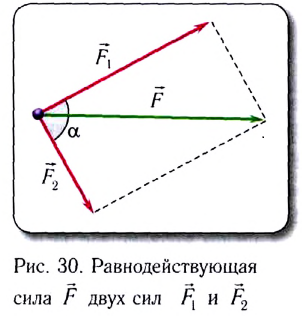
Модуль равнодействующей силы в данном случае вычисляется по формуле 
Силы  называются также составляющими силы
называются также составляющими силы 
В основе классической динамики лежат три закона Ньютона, установленные в результате обобщения различных экспериментальных данных.
Первый закон Ньютона (закон инерции):
- существуют такие системы отсчета, называемые инерциальными, относительно которых тело (материальная точка) сохраняет состояние покоя или равномерного прямолинейного движения, если на него не действуют другие тела или их воздействия скомпенсированы.
Отметим, что силы, действующие на рассматриваемое тело со стороны других тел, скомпенсированы, если их векторная сумма равна нулю 
Тело, на которое не действуют силы со стороны других тел или их воздействие скомпенсировано, называется свободным. Подчеркнем, что движение свободного тела происходит по инерции до тех пор, пока не изменятся силы, действующие на него.
Термин «инерция» происходит от латинского слова iners — косность, бездеятельность.
Можно показать, что любая система отсчета, движущаяся относительно данной ИСО равномерно и прямолинейно, также является инерциальной.
Инерциальными системами отсчета в классической механике принято считать такие системы отсчета, в которых выполняется первый закон Ньютона — закон инерции. Время в классической механике носит абсолютный характер и не меняется при переходе от одной ИСО к другой.
Примерами ИСО являются, например, гелиоцентрическая, связанная с Солнцем, или геоцентрическая, связанная с Землей.
В классической механике справедлив принцип относительности Галилея, устанавливающий факт равноправности различных инерциальных систем отсчета:
во всех ИСО любые механические процессы протекают одинаково при одинаковых начальных условиях.
Иными словами, все ИСО равноправны между собой при изучении разнообразных механических процессов, и никакие эксперименты в замкнутой системе тел не позволят отличить одну инерциальную систему отсчета от другой. Так, никакими механическими экспериментами внутри лифта вы не сможете определить, покоится лифт или движется равномерно прямолинейно.
Аналитически первый закон Ньютона записывается в виде

Система отсчета, относительно которой свободное тело не сохраняет скорость движения неизменной, называется неинерциальной.
При взаимодействии двух тел имеющее большую массу тело приобретает меньшее ускорение, т. е. оно более инертно:

Инертность — свойство тела, характеризующее его способность к изменению скорости при взаимодействии с другими телами. Поскольку количественной мерой инертности является масса m тела, то ее в этом случае называют инертной массой.
С другой стороны, масса определяет также способность тел взаимодействовать с другими телами в соответствии с законом всемирного тяготения
Такое взаимодействие называется также гравитационным (от латинского слова gravitas — тяжесть), и массу в этом случае называют гравитационной.
В современной физике с высокой точностью доказана тождественность значений гравитационной и инертной масс. Поэтому говорят просто о массе тела.
Измерение массы производят по измерению ускорения при взаимодействии исследуемого тела с эталоном:  и взвешиванием тела на весах:
и взвешиванием тела на весах:  (g — ускорение свободного падения).
(g — ускорение свободного падения).
Таким образом, масса — это скалярная физическая величина, являющаяся количественной мерой инертных и гравитационных свойств тела.
Масса является аддитивной величиной, т. е. масса системы тел равна сумме масс отдельных тел, образующих систему: 
Единица массы — килограмм (1 кг) — является основной единицей в СИ.
ГВ качестве эталона килограмма установлена масса Международного прототипа килограмма, который представляет собой цилиндр диаметром и высотой 39 мм из платиноиридиевого сплава (90 % Pt и 10 % Iг) и хранится в Международном бюро мер и весов в Севре близ Парижа.
Второй и третий закон Ньютона
Импульс тела  — векторная физическая величина, равная произведению массы тела и его скорости:
— векторная физическая величина, равная произведению массы тела и его скорости: 
Эксперименты показывают, что действие силы приводит к изменению характера движения свободной материальной точки (тела) — в инерциальной системе отсчета у нее появляется ускорение, направление и модуль которого определяются вторым законом Ньютона.
Второй закон Ньютона (основной закон динамики):
- ускорение приобретаемое материальной точкой в любой ИСО под действием сил, прямо пропорционально равнодействующей этих сил и обратно пропорционально массе m материальной точки:
 приобретаемое материальной точкой в любой ИСО под действием сил, прямо пропорционально равнодействующей
приобретаемое материальной точкой в любой ИСО под действием сил, прямо пропорционально равнодействующей  этих сил и обратно пропорционально массе m материальной точки:
этих сил и обратно пропорционально массе m материальной точки:
где  (рис. 31).
(рис. 31).
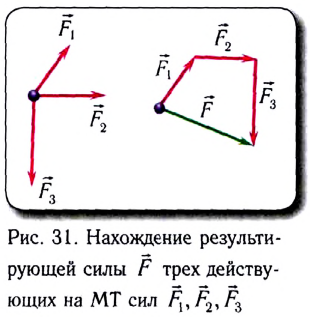
Таким образом, ускорение совпадает по направлению с результирующей силой: 
Основной закон динамики справедлив и для поступательного движения абсолютно твердого тела массой m, так как ускорение  всех его точек одинаково.
всех его точек одинаково.
Отметим, что в случае непоступательного движения абсолютно твердого тела второй закон Ньютона определяет ускорение центра масс тела

С учетом определения ускорения  и импульса тела (МТ)
и импульса тела (МТ)  в случае действия постоянной результирующей силы
в случае действия постоянной результирующей силы  можно записать
можно записать

где  — импульс результирующей силы
— импульс результирующей силы 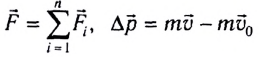 — изменение импульса тела (МТ).
— изменение импульса тела (МТ).
Подчеркнем, что импульс силы определяется как модулем, так и временем действия силы.
Термин «импульс» происходит от латинского слова impulsus — натиск, т. е. включает в себя представления как о величине, так и о продолжительности действия. Впервые этот термин еще до работ И. Ньютона был использован Дж. Валлисом в 1671 г.
Второй закон Ньютона в импульсной форме можно записать следующим образом:
- изменение импульса тела (МТ) относительно любой ИСО равно импульсу результирующей всех сил, подействовавших на него в течение промежутка времени
 тела (МТ) относительно любой ИСО равно импульсу результирующей всех сил, подействовавших на него в течение промежутка времени
тела (МТ) относительно любой ИСО равно импульсу результирующей всех сил, подействовавших на него в течение промежутка времени 

Таким образом, из второго закона Ньютона следует, что:
- а) приложенные к телу (МТ) силы являются причиной изменения его скорости;
- б) равнодействующая всех сил (независимо от их природы), приложенных к телу (МТ), определяет величину и направление его ускорения.
Второй закон Ньютона позволяет определить условие сохранения состояния покоя или равномерного движения тела (МТ) при действии на него других тел.
Таким условием является равенство нулю векторной суммы всех сил, действующих на тело (МТ):

Второй закон Ньютона определяет уравнение движения материальной точки в векторной форме. Его используют для нахождения проекций сил и ускорений на оси прямоугольной декартовой системы координат.
Третий закон Ньютона устанавливает связь между силами, с которыми тела действуют друг на друга, и отражает факт взаимности механического действия (взаимодействия).
Третий закон Ньютона (закон действия и противодействия):
- при любых взаимодействиях двух тел на них действуют силы одинаковой природы со стороны одного тела на другое. Эти силы равны по модулю, противоположны по направлению и приложены к разным телам:
 одинаковой природы со стороны одного тела на другое. Эти силы равны по модулю, противоположны по направлению и приложены к разным телам:
одинаковой природы со стороны одного тела на другое. Эти силы равны по модулю, противоположны по направлению и приложены к разным телам:
Здесь  — сила, действующая на первое тело со стороны второго, a
— сила, действующая на первое тело со стороны второго, a  — на второе со стороны первого. Подчеркнем, что силы
— на второе со стороны первого. Подчеркнем, что силы  и
и  в случае взаимодействия материальных точек направлены вдоль соединяющей их прямой.
в случае взаимодействия материальных точек направлены вдоль соединяющей их прямой.
Так, при столкновении тележки действуют друг на друга с силами, равными по модулю и противоположными по направлению (рис. 32). 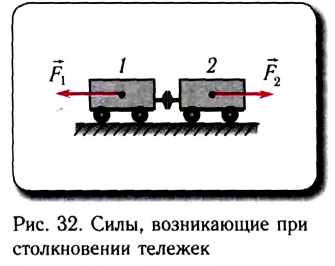
Из третьего закона Ньютона следует, что силы любой природы при различных взаимодействиях всегда возникают и исчезают парами.
Следует помнить, что рассматриваемые силы  приложены к разным телам и по этой причине они не могут компенсировать друг друга, так как при вычислении равнодействующей складывают только силы, приложенные к одному телу.
приложены к разным телам и по этой причине они не могут компенсировать друг друга, так как при вычислении равнодействующей складывают только силы, приложенные к одному телу.
Примеры различных пар сил действия и противодействия приведены на рисунке 33.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Статика в физике
- Кинематика в физике
- Законы сохранения в физике
- Международная система единиц СИ
- Магнитное поле в физике
- Вектор индукции магнитного поля
- Магнитное поле Земли
- Ядерная энергетика в физике
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Основные законы динамики в теоретической механике

Основные законы динамики
Первый закон (закон инерции):
Материальная точка сохраняет состояние покоя или прямолинейного и равномерного движения, пока и поскольку она не понижается приложенными к ней силами изменять это состояние’).
Свойство материальной точки сохранять состояние своего движения (модуля и направления своей скорости или, в частности, состояние покоя) неизменным при отсутствии сил, действующих на точку (или при их равновесии), называется ее инерцией. Отсюда и закон, устанавливающий это свойство всякой материальной точки, получил название закона инерции.
В древности считали покой естественным состоянием материн, полагая, что всякое тело, будучи выведено из состояния покоя, стремится к нему возвратиться. В переводе с латинского слово «инерция» означает косность, бездействие. Ясно, что в механике в настоящее время это слово надо понимать иначе. Смысл понятия «инерция» простой и очевидный: движение материальной точки не может изменяться «само по себе», при отсутствии действия па нее со стороны других тел, т. е. при отсутствии сил. Но достаточно приложить к любой материальной точке любую, даже ничтожно малую силу (если только она не уравновешивается силами сопротивления движению п реакциями связей), как точка тотчас же начнет изменять свою скорость, и это изменение будет происходить все время, пока на нее будет действовать сила.
Отмстим одно обстоятельство, имеющее принципиальное значение для классической динамики.
Из кинематики мы знаем, что движение тела нельзя рассматривать безотносительно к системе отсчета. Относя же движение одного н того же тела к различным системам отсчета, мы можем наблюдать, вообще говоря, совершенно различные движения. Так, например, тело, находящееся в покое на палубе речного парохода или движущееся по ней прямолинейно и равномерно, может двигаться по отношению к берегам реки и непрямолинейпо и неравномерно при изменении направления и модуля скорости парохода. В этом случае, применяя к наблюдаемым движениям тела закон инерции, наблюдатель, стоящий на палубе парохода, и наблюдатель, стоящий па берегу реки, сделают противоположные выводы. Первый — об уравновешенности сил, приложенных к данному телу, второй — об отсутствии равновесия.
Предметом динамики служит установление связи между наблюдаемым движением тел и действующими на них силами, связь же эта зависит от выбора системы отсчета, и потому нужно, прежде всего, решить вопрос о том, для какой системы отсчета применимы законы классической механики вообще и, в частности, закон инерции.
Система отсчета, по отношению к которой выполняется закон инерции, называется основной или инер-циальной системой, а движение, наблюдаемое по отношению к этой системе, называется абсолютным.
Излагая основные законы классической механики, Ньютон указывал, что они относятся к абсолютному движению, под которым он понимал движение в некотором абсолютно неподвижном пространстве. Так как такого пространства в природе не существует, то нет и такой системы отсчета, по отношению к которой мы могли бы считать движение абсолютным в ньютоновском понимании этого слова.
Однако все же можно найти такую систему отсчета, которая может быть принята практически за неподвижную для всех тел нашей солнечной системы.
Если поместить начало координат в центре Солнца, а координатные оси направить на так называемые «неподвижные» звезды, то получится система координат, называемая гелиоцентрической.
Опыт и наблюдения показывают, что для движений (со скоростями, значительно меньшими скорости света), отнесенных к гелиоцентрической системе координат, закон инерции выполняется с очень большой степенью точности, и потому такая система отсчета может быть принята за ннерциальную.
Если материальная точка движется относительно инерциальной системы отсчета по инерции с какой-либо абсолютной скоростью  , то таким же будет движение этой точки относительно любой другой системы отсчета, движущейся относительно инерциальной поступательно, прямолинейно и равномерно со скоростью
, то таким же будет движение этой точки относительно любой другой системы отсчета, движущейся относительно инерциальной поступательно, прямолинейно и равномерно со скоростью  .
.
В самом деле, как это следует из теоремы о сложении скоростей, относительная скорость точки  = —. Но в данном случае и суть постоянные векторы, следовательно, постоянным будет и вектор .
= —. Но в данном случае и суть постоянные векторы, следовательно, постоянным будет и вектор .
Отсюда следует, что любая система отсчета, совершающая относительно инерциальной системы поступательное, прямолинейное и равномерное движение, будет также инерциальной системой. Всякая же система отсчета, движущаяся относительно инерциальной непрямолинейно, пли хотя бы и прямолинейно, но неравномерно, уже не будет инерциальной системой.
Так как Земля движется вокруг Солнца по некоторой криволинейной орбите, вращаясь при этом вокруг своей оси, то, строго говоря, система отсчета, жестко связанная с Землей, не является инерциальной системой. Однако, вследствие малой кривизны земной орбиты и малой угловой скорости вращения Земли вокруг ее оси (один оборот за сутки), в подавляющем большинстве задач динамики, с которыми приходится иметь дело и обычной технической практике, можно с вполне достаточной точностью систему отсчета, неподвижную относительно Земли, считать инерциальной. Поправки приходится при этом вводить лишь в тех сравнительно редких случаях, когда вращением Земли пренебречь нельзя (в задачах артиллерии и ракет дальнего действия при изучении морских и воздушных течений и некоторых других, очень быстрых или длящихся очень долго, движений).
Второй закон (основной закон динамики):
Модуль силы, действующей на материальную точку, равен произведению массы точки на модуль ее ускорения, а направление силы совладает с направлением ускорения:

Необходимо иметь в виду, что формулировкой закона предполагается, что точка, к которой приложена сила, совершенно свободна, т. е. не встречает никаких препятствий своему движению. Требуется подчеркнуть, что t направлением силы всегда совпадает направление ускорения точки, а не направление ее движения. Направление движения будет совпадать с направлением силы лишь в тех случаях, когда сила действует на свободную точку, находившуюся до того в noxoj или имевшую начальную скорость, совпадающую с направлением силы.
Из равенства (104) следует, что

т.е. чем больше масса точки, тем меньше ускорение точки, сообщаемое он данной силой. Следовательно, чем больше масса точки, тем медленнее, под действием приложенной к ней силы, изменяется скорость точки, тем меньше отклоняется ее движение от инерциального.
Таким образом, различные материальные точки обладают различной инертностью, и мерой инертности материальной точки является ее масса.
Всякое тело можно считать состоящим из материальных точек (частиц), н потому масса тела равна сумме масс его частиц.
Так как различные точки твердого теля могут совершать различные движения и иметь различные ускорения, то масса тела не во всех случаях служит мерой его инерции. Мера инерции тела зависит, вообще говоря, не только от величины масс част ни тела, по и от их распределения в теле. Масса тела япляется мерой, его инерции только в том случае, когда тело совершает поступательное движение (т.е. когда ускорения всех точек тела одинаковы).
На каждое тело, находящееся в поле тяжести, действует сила  тяжести тела. Из опыта известно, что при свободном падении (в пустоте и с небольшой высоты) все тела падают на Землю в данном месте се поверхности с одинаковым ускорением. На основании равенства (104) можно записать:
тяжести тела. Из опыта известно, что при свободном падении (в пустоте и с небольшой высоты) все тела падают на Землю в данном месте се поверхности с одинаковым ускорением. На основании равенства (104) можно записать:

Вес тела равен произведению массы тела на ускорение свободно падающего тела в данном месте земной поверхности. Так как ускорение свободно падающего тела не зависит от его размеров, то масса материальной точки определяется по ее весу из той же зависимости (105), что и масса любого тела.
По воззрениям классической механики масса тела является величиной постоянной, не зависящей от его движения. Вес же тела, как и ускорение  свободно падающего тела, зависит от географической широты места, в котором производится взвешивание, от его высоты над уровнем моря и от других физических причин.
свободно падающего тела, зависит от географической широты места, в котором производится взвешивание, от его высоты над уровнем моря и от других физических причин.
Так как направление силы всегда совпадает с направлением ускорения, сообщаемого ею свободной материальной точке, а масса точки есть скалярная положительная величина, то равенству (104) можно придать форму векторного уравнения:

Вектор силы, приложенной к материальной точке, равен произведению массы точки на вектор ее ускорения.
Уравнение (10G), устанавливающее зависимость между движением материальной точки и действующей на нее силон и являющееся полной математическом формулировкой основного закона динамики, называется основным уравнением динамики точки.
С изменением системы отсчета наблюдаемый характер движения точки, а следовательно, и се ускорение могут изменяться, поэтому второй закон динамики, так же как и ее первый закон, нельзя применять безотносительно к системе отсчета.
Под ускорением точки, входящим в основное уравнение динамики, надо понимать ее абсолютное ускорение, ■г. е. ускорение точки по отношению к инерциальной системе отсчета.
Третий закон (закон равенства действия и противодействия) :
Силы, с которыми действуют друг на друга две материальные точки, всегда равны по модулю и направлены по одной прямой (соединяющей данные точки) в противоположные стороны.
Этот закон был подробно рас-смотрен нами в статике, в качестве четвертой ее аксиомы (§ 4), и имел там широкое применение.
Если материальная точка  действует на материальную точку
действует на материальную точку  с силой
с силой  , то точка действует на точку с силой
, то точка действует на точку с силой  (рис. 161). Пусть масса точки равна
(рис. 161). Пусть масса точки равна  и ускорение, сообщаемое ей силой
и ускорение, сообщаемое ей силой  , равно
, равно  масса же точки равна
масса же точки равна  и ускорение, сообщаемое ей силой . равно
и ускорение, сообщаемое ей силой . равно  . По основному уравнению динамики
. По основному уравнению динамики  и
и

Согласно же данному закону



Модули ускорений, сообщаемых друг другу двумя материальными точками, обратно пропорциональны массам этих точек. Направлены же эти ускорения гак же, как и силы взаимодействия, т. е. но одной прямой  в противоположные стороны.
в противоположные стороны.
Четвертый закон (закон независимости действия сил):
Ускорение, получаемое материальной точкой при одновременном действии на нее нескольких сил, равно геометрической сумме тех ускорений, которые получила бы эта точка под действием каждой из данных сил в отдельности.
Пусть на точку, масса которой равна  , одновременно действуют силы
, одновременно действуют силы

сообщая ей при этом ускорение  . Ускорения, которые получила бы эта точка при раздельном действии на нее каждой из данных сил, обозначим через
. Ускорения, которые получила бы эта точка при раздельном действии на нее каждой из данных сил, обозначим через

Согласно закону, установленному на основании многочисленных опытов Галилеем, будем иметь:

Если мы умножим обе части этого равенства па массу точки, то получим:

Согласно основному уравнению динамики


Обозначив через  равнодействующую системы сил, приложенных к точке, равную их геометрической сумме, будем иметь:
равнодействующую системы сил, приложенных к точке, равную их геометрической сумме, будем иметь:

Последнее равенство ничем не отличается от основного уравнения динамики (106). Следовательно, основное уравнение динамики остается справедливым и в том Случае, когда на точку одновременно действует несколько сил. Под приложенной к точке силой нужно понимать в этом случае равнодействующую всех сил, действующих на точку.
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Возможно вам будут полезны эти дополнительные темы:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института