- Законы динамики
- Задачи динамики
- Основные виды сил
- Дифференциальные уравнения движения точки
- Прямолинейное движение точки
- Колебательное движение материальной точки
- Свободные колебания
- Колебания при вязком трении
- Вынужденные колебания
- Вынужденные колебания при наличии вязкого трения
- Общие теоремы динамики точки
- Теорема об изменении количества движения материальной точки
- Теорема об изменении момента количества движения материальной точки
- Центральная сила. Второй закон Кеплера
- Работа силы. Мощность
- Основные понятия
- Работа основных видов сил
- Теорема об изменении кинетической энергии точки
- Силовые поля и потенциальная энергия
- Основные виды потенциальных полей
- Магия тензорной алгебры: Часть 14 — Нестандартное введение в динамику твердого тела
- Введение
- 1. Старый, как мир, принцип Даламбера
- 2. Принцип Даламбера для твердого тела. Главный вектор и главный момент сил инерции
- 3. На сцену выходят центр масс и тензор инерции
- 4. Особая роль центра масс
- Заключение
- 🔥 Видео
Видео:Основное уравнение динамики вращательного движения. 10 класс.Скачать

Законы динамики
Первый закон Ньютона (закон инерции Галилея)
Существуют такие системы отсчета, относительно которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если точка покоилось в определенный момент времени, то она будет покоиться и в последующие моменты.
Не во всех системах отсчета выполняется закон инерции. Например, если мы выберем систему отсчета, связанную с ускоряющейся ракетой, то относительно этой системы, не взаимодействующие материальные точки, не будут двигаться прямолинейно и равномерно.
Инерциальная система отсчета – это система отсчета, в которой справедлив закон инерции.
Движение по инерции – это движение точки, совершаемое при отсутствии действующих на нее сил.
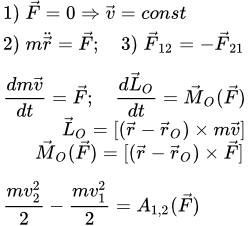
Второй закон Ньютона (основной закон динамики)
Взаимодействие на выбранную материальную точку со стороны других тел описывается вектором, который называется силой. При этом, в инерциальных системах отсчета, действие силы приводит к ускорению точки , которое пропорционально приложенной силе, имеет одинаковое с ней направление, и обратно пропорционально массе точки:
(1) .
Если есть радиус-вектор, проведенный из начала координат к точке, то ускорение есть вторая производная радиус-вектора по времени:
.
Производную по времени, в теоретической механике, обозначают точкой над переменной, а не штрихом, как в математическом анализе.
Если на точку действует не одна, а n сил, то в правой части производится суммирование по всем силам, действующих на точку. Тогда уравнение (1) примет вид:
(2) .
Третий закон динамики (закон равенства действия и противодействия)
Если две материальные точки действуют друг на друга, то сила, с которой первая точка действует на вторую, равна по абсолютной величине и противоположна по направлению силе, с которой вторая точка действует на первую. При этом силы направлены вдоль прямой, соединяющей точки.
Закон независимости сил
Несколько одновременно действующих на материальную точку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме.
То есть уравнение (2) можно записать в виде:
, где .
Видео:Урок 93. Основное уравнение динамики вращательного движенияСкачать
Задачи динамики
Первая задача динамики
Зная закон движения точки, определить действующую на нее силу.
Вторая (основная) задача динамики
Зная действующие на точку силы, определить ее закон движения.
Видео:Физика. 10 класс. Основное уравнение динамики вращательного движенияСкачать

Основные виды сил
Единицей измерения силы в СИ является 1 ньютон (1 Н = кг·м/с 2 ). Это сила, которую нужно приложить к точке массой 1 кг, чтобы она получила ускорение 1 м/с 2 .
Сила тяжести.
Сила тяжести действует на любую материальную точку, находящуюся на поверхности Земли. Она пропорциональна массе точки и равна
,
где – ускорение свободного падения, направленное вниз. Его величина зависит от широты и высоты над уровнем моря. Стандартное значение, принятое при построении систем единиц, составляет м/с 2 .
Сила тяготения.
.
Здесь – массы точек, r – расстояние между ними, Н·м 2 /кг 2 – гравитационная постоянная.
Для точки массы m на поверхности Земли имеем: . Отсюда . Тогда силу тяготения Земли можно вычислять по формуле:
,
где R = 6371 км – радиус Земли; r – расстояние от точки до центра Земли.
Сила электростатического взаимодействия.
,
где – величины зарядов; r – расстояние между ними; Н·м 2 /Кл 2 – коэффициент. Одноименные заряды отталкиваются, разноименные – притягиваются.
Сила трения скольжения
возникает при скольжении одного тела по поверхности другого. Она направлена в сторону, противоположную скорости движения. Ее величина определяется по формуле:
F = fN ,
где N – сила давления, перпендикулярная поверхности, с которой скользящее тело прижимается к поверхности; f – коэффициент трения, который зависит от материалов соприкасаемых тел.
Сила упругости.
Эта сила возникает при деформации упругих тел. Это могут быть растяжения, сжатия и изгибы. Она определяется по формуле
F = cλ ,
где λ – величина деформации; c – коэффициент, который зависит от материала упругого тела. Для пружины λ – это удлинение или сжатие пружины; c – коэффициент жесткости.
Сила вязкого трения.
При движении тела в вязкой среде с небольшими скоростями, на него действует сила трения, пропорциональная скорости движения:
F = μv ,
где v – скорость тела; μ – коэффициент сопротивления.
При больших скоростях, сила трения пропорциональна квадрату скорости.
Видео:Динамика точки. Законы Галилея-НьютонаСкачать

Дифференциальные уравнения движения точки
Спроектируем уравнение (2) на оси прямоугольной системы координат. Пусть радиус вектор точки имеет в этой системе компоненты (проекции) . Тогда из векторного уравнения (2) получаем систему уравнений:
.
Это есть дифференциальные уравнения движения точки в прямоугольной системе координат.
Спроектируем уравнение (2) на оси естественного трехгранника:
.
Здесь – единичный вектор, направленный по касательной к траектории; – единичный вектор, перпендикулярный и лежащий в касательной плоскости траектории; – единичный вектор, перпендикулярный и . Поскольку , то .
Вводим пройденный путь s , измеренный вдоль дуги траектории точки. Пусть ρ – радиус кривизны траектории в рассматриваемой точке. Тогда, для естественного способа задания движения точки, уравнения движения примут вид:
.
Уравнения движения в полярных координатах для плоского движения:
.
Прямолинейное движение точки
Пусть ось x направлена вдоль линии движения точки. Тогда уравнение движения имеет вид:
(3) .
Его общее решение:
,
где – произвольные постоянные. Их находят из начальных условий:
.
Если сила Fx зависит только от времени, то из уравнения (3) сначала определяют скорость vx , а затем координату x , последовательно интегрируя уравнения:
.
Если сила зависит только от координаты x , то выполняют преобразование:
;
;
.
Колебательное движение материальной точки
Свободные колебания
Рассмотрим движение груза на пружинке. Считаем, что груз является материальной точкой; массой пружины можно пренебречь; и отсутствует сила тяжести. Пусть движение происходит вдоль оси x . За начало отсчета выберем такое положение груза, при котором пружина не деформирована. Тогда на точку действует только восстанавливающая сила упругости пружины, которая определяется по закону Гука:
(К1) ,
где x – деформация пружины; c – коэффициент жесткости. Он равен силе, которая возникает при деформации, равной единице (один метр) и имеет размерность [Н/м]. Из (К1) видно, что сила является восстанавливающей, то есть направлена так, чтобы вернуть точку в начало координат к недеформированному состоянию. Сила такого вида возникает не только при деформации пружины, но и во многих других случаях при небольшом отклонении точки от равновесного положения.
Составим уравнение движения точки и выполняем преобразования:
.
Введем обозначение . В результате получаем.
(К2) .
Уравнение (К2) называется дифференциальным уравнением свободных колебаний. Его также называют дифференциальным уравнением гармонических колебаний. Оно является линейным однородным дифференциальным уравнением второго порядка.
Ищем его решение в виде . Получаем характеристическое уравнение:
.
Оно имеет два мнимых корня: . Тогда общее решение уравнения (К2) имеет вид:
,
где и – произвольные постоянные. Они определяются из начальных условий. Пусть – координата и скорость точки в начальный момент времени , тогда
;
.
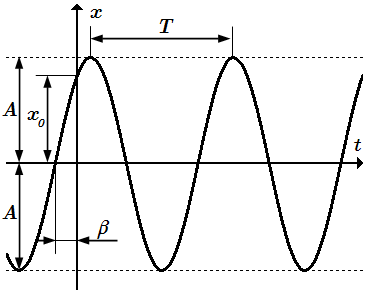
График гармонического движения точки.
Часто бывает удобно вместо постоянных интегрирования и перейти к новым постоянным A и β по формулам: . Тогда
(К3) .
Это есть уравнение гармонического колебательного движения точки. Здесь – амплитуда колебаний;
– фаза колебаний;
β – начальная фаза, ;
– циклическая частота колебаний, которую также называют угловой или собственной.
Период колебаний: .
Частота колебаний: – это число циклов колебаний, совершенных в единицу времени. Она широко применяется в технике, однако для математического описания более удобна угловая частота, которую мы будем использовать в дальнейшем и называть просто частотой.
Частота k и период T не зависят от начальных условий, а амплитуда и фаза – зависят. Кроме этого, k и T не зависят от амплитуды. Колебания, у которых частота и период не зависят от амплитуды, называют изохорными колебаниями. Если рассмотреть колебания с большой амплитудой, при которой закон Гука (К1) не выполняется, то уравнение (К2) не будет линейным и колебания не будут изохорными.
Влияние постоянной силы
Пусть теперь, наряду с восстанавливающей силой (К1), на точку действует постоянная сила P , например сила тяжести. Тогда уравнение движения примет вид:
.
Это приводит к смещению центра колебаний в сторону действия силы P на величину
δ ст = P/c .
Это смещение называют статическим отклонением. Если P – сила тяжести, то
.
Колебания при вязком трении
Пусть на точку, кроме силы упругости пружины, действует сила сопротивления среды. При малых скоростях она пропорциональна скорости точки:
. Это так называемое вязкое трение. Составим уравнение движения:
. Обозначив μ/m= 2 b , получаем:
(К4) . Составляем характеристическое уравнение:
(К5) . Оно имеет два корня:
.
Затухающие колебания
При b , корни характеристического уравнения (К5) комплексные:
. Тогда общее решение уравнения (К4) имеет вид:
,
где . Обозначим , . Тогда
(К6) .
, ;
– амплитуда (переменная величина);
b – коэффициент затухания;
– частота затухающих колебаний;
– период затухающих колебаний. Он больше периода свободных колебаний. При небольшом коэффициенте затухания (при b/k ≪ 1 ) T 1 ≈ T .
Колебания, происходящие по закону (К6) называются затухающими. График затухающих колебаний заключен между двумя кривыми x = ±Ae –bt , симметричными относительно оси t .
Затухающие колебания можно рассматривать как гармонические колебания с переменной амплитудой . Относительное изменение переменной амплитуды за период колебания называется декрементом колебаний. Он равен
. Модуль логарифма декремента называется логарифмическим декрементом. Он равен .
Апериодическое движение точки
При (или ) корни характеристического уравнения (К5) действительные. Поэтому движение точки является апериодическим.
При (или ) характеристическое уравнение (К5) имеет два различных действительных корня:
. Тогда общее решение уравнения (К4) имеет вид:
(К7) .
Сюда не входят тригонометрические функции. Поэтому это апериодическое движение. Точка может пройти через положение равновесия x = 0 не более одного раза.
Закон движения (К7) можно выразить через гиперболические функции, если положить: . Тогда
.
Перейдем к новым постоянным интегрирования A и β , выполнив подстановку:
. Тогда
.
При b = k характеристическое уравнение (К5) имеет два кратных вещественных корня . Общее решение уравнения (К4) имеет вид:
.
Движение также апериодическое. Точка может пройти через положение равновесия x = 0 не более одного раза.
Вынужденные колебания
Рассмотрим случай, когда кроме восстанавливающей силы , на точку действует возмущающая сила, меняющаяся по гармоническому закону:
(К8) . Составим уравнение движения:
.
Введем обозначение h=H/m . Разделив на m , получаем дифференциальное уравнение вынужденных колебаний:
(К9) .
Это линейное неоднородное дифференциальное уравнение с постоянными коэффициентами со специальной неоднородной частью. Его общее решение равно сумме общего решения однородного уравнения и частного (то есть любого, отличного от нулевого) решения данного уравнения:
;
;
.
Общее решение однородного уравнения: .
Ищем частное решение в виде . В результате получаем:
;
.
Коэффициент динамичности. Действие постоянной возмущающей силы величины H приводит к статическому отклонению . Периодическая возмущающая сила (К8) с амплитудой H приводит к периодическим колебаниям с амплитудой . В связи с этим вводят коэффициент динамичности: .
Он показывает, во сколько раз амплитуда колебаний превосходит статическое отклонение.
Явление резонанса и биения
Когда частота возмущающей силы равна частоте собственных колебаний p = k , коэффициент динамичности стремится к бесконечности, амплитуда колебаний неограниченно возрастает. Это явление называется резонансом. Уравнение движения точки при p = k имеет вид:
(К10) .
Оно имеет частное решение
.
Общее решение уравнения (К10):
.
Это уравнение показывает, что амплитуда вынужденных колебаний возрастает пропорционально времени. Фаза вынужденных колебаний отстает от фазы возмущающей силы на π/ 2 .
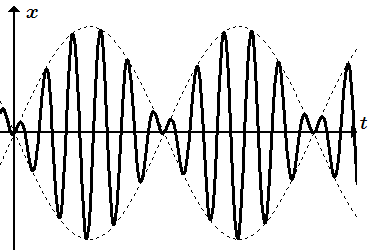
Биения.
Когда частота p возмущающей силы близка к собственной частоте k колебания точки, p/k ≈ 1 , возникает явление, называемое биениями. В этом случае частное решение уравнения (К9) имеет вид:
,
где .
Происходит наложение колебаний. Их можно рассматривать как вынужденные колебания частоты с переменной амплитудой, которая является периодической функцией с частотой .
Вынужденные колебания при наличии вязкого трения
Составим уравнение движения вынужденных колебаний при наличии вязкого трения:
.
Получаем дифференциальное уравнение:
.
Его общее решение имеет вид.
1) при b :
;
2) при b > k :
;
3) при b = k :
.
Здесь ;
ε определяется из уравнений:
.
Величины A и β являются постоянными интегрирования. Они определяются из начальных условий.
Видео:Вращательное движение. 10 класс.Скачать

Общие теоремы динамики точки
Теорема об изменении количества движения материальной точки
Теорема об изменении количества движения материальной точки в дифференциальной форме
Изменение количества движения материальной точки за бесконечно малый промежуток времени dt равно элементарному импульсу равнодействующей сил, приложенных к этой точке:
.
Эту теорему можно сформулировать так:
Производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке:
(Т1) .
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если проинтегрировать уравнение (Т1) по времени от начального момента времени t = 0 до конечного момента t = t1 , то получим теорему в интегральной форме.
Теорема об изменении количества движения материальной точки в интегральной форме
изменение количества движения материальной точки за конечный промежуток времени [0,t1] равно импульсу силы, приложенной к этой точке, за тот же промежуток времени:
.
Здесь – скорость точки в моменты времени t = 0 и t = t 1 , соответственно.
Теорема об изменении момента количества движения материальной точки
Теорема об изменении момента количества движения материальной точки
Производная по времени от момента количества движения материальной точки, относительно произвольного центра O , равна моменту равнодействующей силы, приложенной к точке, относительно того же центра:
.
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если на точку действует несколько сил , то равнодействующая сила равна их геометрической сумме:
.
Тогда можно записать эту теорему так:
.
Далее будем считать, что точка O выбрана в начале координат. Тогда .
Центральная сила. Второй закон Кеплера
Пусть на точку действует центральная сила с центром в начале координат O . Тогда ее момент относительно O равен нулю. По теореме об изменении момента количества движения материальной точки имеем:
.
Если ввести секторную скорость , то она оказывается постоянной
.
Получаем второй закон Кеплера (закон площадей).
Второй закон Кеплера (закон площадей)
Под действием центральной силы точка движется по плоской кривой с постоянной секторной скоростью. То есть радиус-вектор точки заметает равные площади в любые равные промежутки времени.
Работа силы. Мощность
Основные понятия
Единицей измерения работы в СИ является 1 джоуль (1 Дж = 1 Н·м = кг·м 2 /с 2 ).
Работа силы при движении материальной точки от точки M 1 до точки M 2 равна сумме (интегралу) элементарных работ:
.
Если ввести скорость точки , то
.
Теорема о работе силы
Работа A равнодействующей силы на некотором перемещении равна алгебраической сумме работ Ak составляющих сил на том же перемещении:
.
Мощность – это величина работы, произведенная за единицу времени.
.
Единицей измерения мощности в СИ является 1 ватт (1 Вт = 1 Дж/с). Другие единицы мощности: 1 кВт (киловатт) = 1000 Вт; 1л.с.(лошадиная сила) = 736 Вт = 75 кгс·м/с.
Работа основных видов сил
Работа силы тяжести:
,
где P – сила тяжести, действующая на точку. Если начальная точка выше конечной, то работа положительна; если начальная точка ниже конечной, то отрицательна.
Работа силы упругости:
.
Здесь – деформация пружины в начальном положении; – в конечном.
Работа силы трения. Если сила трения постоянна, то
,
где s – длина пройденного точкой пути; – сила трения, которая всегда направлена в сторону, противоположную перемещению; f – коэффициент трения; N – нормальная реакция поверхности. Работа силы трения всегда отрицательна.
Работа силы тяготения.
На точку, находящуюся вблизи планеты Земля, на расстоянии r ≥ R от ее центра, действует сила притяжения
,
где R = 6371 км – радиус Земли. Тогда при перемещении точки из положения M1 в положение M2, сила тяготения совершит работу
.
Она не зависит от траектории движения тела.
Теорема об изменении кинетической энергии точки
Теорема об изменении кинетической энергии точки в дифференциальной форме
Дифференциал кинетической энергии точки равен сумма элементарных работ всех действующих на точку сил:
.
Проинтегрировав обе части этого уравнения вдоль траектории движения точки от положения M1 до M2, получим теорему в интегральной форме.
Теорема об изменении кинетической энергии точки
Изменение кинетической энергии материальной точки, при переходе ее из начального положения M1 в конечное положение M2, равно сумме работ всех сил, приложенных к точке на этом перемещении:
.
Силовые поля и потенциальная энергия
1. Работа сил стационарного поля при перемещении точки из положения M1 в положение M2 зависит только от начального положения M1, конечного положения M2, и формы траектории, но не зависит от закона движения точки.
2. Работа, совершенная полем при перемещении точки из положения M1 в M2 равна по модулю и обратна по величине работе, совершенной полем при перемещении точки из M2 в M1 при перемещении по той же траектории:
.
Для нестационарных полей эти свойства на выполняются.
Примеры стационарных полей: поле силы тяжести на поверхности Земли; электростатическое поле от неподвижно закрепленного заряда; поле силы упругости пружины, один конец которой закреплен.
Потенциальное силовое поле – это стационарное силовое поле, работа сил которого зависит только от начального M1 и конечного M2 положений точки, и не зависит от формы ее траектории. Потенциальное силовое поле также называют консервативным.
В потенциальном поле существует такая функция, через которую можно выразить вектор силы , действующей на точку.
Силовая функция – это функция, зависящая от координат точки ( x, y, z ) , через которую выражаются проекции силы потенциального поля на оси координат:
.
Отсюда следует, что сила не изменится, если к силовой функции прибавить постоянную. Таким образом, силовая функция определена с точностью до произвольной постоянной.
В потенциальном поле элементарная работа является дифференциалом от силовой функции:
.
Работа при конечном перемещении из точки в точку равна разности силовой функции в этих точках:
.
Таким образом, в потенциальном поле, работа сил поля не зависит от формы траектории. На замкнутом перемещении работа равна 0. Для более наглядной физической интерпретации, вводят понятие потенциальной энергии. Она равна, с точностью до произвольной постоянной, силовой функции, взятой с обратным знаком.
Потенциальная энергия П – это работа, которую нужно совершить при перемещении точки в потенциальном поле из данного положения в произвольным образом выбранное нулевое положение.
Так, для поля деформации, в качестве нулевого положения обычно принимают не деформированное положение; для гравитационного и электростатических полей за нулевое выбирают положение, бесконечно удаленное от тела или заряда. Для силы тяжести в поле Земли принимают любое, удобное для расчета положение. Таким образом, потенциальная энергия равна силовой функции, взятой с обратным знаком плюс постоянная, зависящая от выбора нулевого положения:
.
Пусть – нулевое положение. Тогда
;
.
Работа сил поля при перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий: .
Эквипотенциальные поверхности – это поверхности равного потенциала:
.
Сила направлена перпендикулярно эквипотенциальной поверхности.
Закон сохранения механической энергии
Если точка находится в потенциальном поле, то сумма ее кинетической и потенциальной энергий является постоянной:
.
Если на точку действуют несколько сил от разных потенциальных полей, то в качестве потенциальной энергии нужно взять сумму потенциальных энергий от каждого силового поля:
.
Основные виды потенциальных полей
В поле силы тяжести, потенциальная энергия зависит от высоты. Направив ось z вертикально вверх, получим: .
Поле силы упругости пружины. В этом поле, потенциальная энергия зависит от деформации λ пружины:
.
В качестве нулевого положения выбирают положение без деформации: λ = 0 .
Сила гравитационного притяжения и космические скорости
Между любыми двумя точками массами m 1 и m 2 , действует сила всемирного тяготения. Так, на точку 2 действует сила притяжения со стороны точки 1:
,
направленная вдоль прямой, проходящей через точку 1. Здесь r – расстояние между точками; Н·м 2 /кг 2 – гравитационная постоянная.
В результате притяжения, обе точки получают ускорения и движутся друг относительно друга. Мы рассмотрим более простой, но важный случай, когда масса M = m 1 одного из тел намного больше массы m = m 2 второго тела. Тогда точка с меньшей массой практически не оказывает влияния на движение более массивной точки. Выберем начало инерциальной системы координат в точке 1. Тогда силу гравитационного притяжения можно рассматривать как центральную силу и представить ее в векторном виде:
(П1) .
Потенциальная энергия точки 2:
(П2) .
Здесь нулевое положение выбрано на бесконечности: .
Формулы (П1) и (П2) справедливы, если объект 1 является шаром с плотностью, зависящей только от расстояния r до его центра. Пусть R – радиус такого шара. Тогда в формулах (П1) и (П2) r – это расстояние от центра шара 1 до точки 2. Они справедливы при .
Эти формулы можно использовать при расчете движения спутников вокруг Земли. Поскольку Земля вращается вокруг своей оси, то ее форма является эллипсоидом. Но в первом приближении Землю можно считать шаром радиуса R = 6371 км. Из таких допущений можно оценить космические скорости, необходимые для выведения летательных аппаратов на космические орбиты.
Первая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на круговую орбиту. Она равна км/с. Если у тела первая космическая скорость, то оно может вращаться по круговой орбите, не падая на Землю, то есть стать ее спутником.
Вторая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на параболическую орбиту. Она равна км/с. Если у тела скорость больше второй космической, то ее траекторией является гипербола, и, при отсутствии помех, оно будет удаляться от Земли и никогда не вернется назад.
Однако Солнце является той преградой, которая не даст спутнику со второй космической скоростью удалиться на бесконечное расстояние. Чтобы тело могло покинуть пределы солнечной системы, ему необходимо сообщить третью космическую скорость км/с.
Использованная литература:
А. А. Яблонский, Курс теоретической механики, часть II, динамика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
Автор: Олег Одинцов . Опубликовано: 11-12-2019
Видео:Основное уравнение динамики вращательного движенияСкачать
Магия тензорной алгебры: Часть 14 — Нестандартное введение в динамику твердого тела
Видео:Общее уравнение динамики. Задача 1Скачать

Введение
Динамика твердого тела — раздел механики, который в своё время задал четкий вектор развития этой науки. Это один из самых сложных разделов динамики, и задача интегрирования уравнения сферического движения для произвольного случая распределения массы тела не решена до сих пор.
В этой статье мы начнем рассматривать динамику твердого тела, применяя аппарат тензорной алгебры. Эта пилотная статья о динамике ответит на ряд фундаментальных вопросов, касающихся, например, такого важного понятия как центр масс тела. Что такое центр масс, что отличает его от остальных точек тела, почему уравнения движения тела составляют в основном относительно этой точки? Ответ на эти, и некоторые другие вопросы находится под катом.

Интегрирование уравнений движения этой детской игрушки — одна из до сих пор не решенных задач механики.
Видео:Поступательное и вращательное движенияСкачать

1. Старый, как мир, принцип Даламбера

Для начала рассмотрим движение материальной точки. Непосредственно из аксиом вытекает основное уравнение динамики точки

ускорение помноженное на массу есть векторная сумма приложенных к точке сил. И о силах, которые приложены к точке надо поговорить подробнее. В разделе механики, называемом аналитической механикой, силы, прикладываемые к точкам механической системе подлежат строгой классификации.
Силы, стоящие в правой части (1) разделяются на две группы
- Активные силы. Этой группе сил можно дать следующее определение
Активными называют силы, величину которых можно определить из условия задачи
Говоря формальным языком, активная сила определяется вектор функцией
где — обобщенная координата точки; — обобщенная скорость точки. Из данного выражения видно, что начиная решать задачу о движении и имея начальные условия (момент времени, положение и скорость) можно сразу рассчитать активную силу.
Сила тяжести, упругости, Кулоновская сила взаимодействия заряда с электрическим полем, сила Ампера и сила Лоренца, сила вязкого трения и аэродинамического сопротивления — всё это примеры активных сил. Выражения для их расчета известны и эти силы можно посчитать, зная положение и скорость точки.
Реакции связей. Самые неприятные силы, которые только можно придумать. Напомню одну из аксиом статики, именуемую аксиомой о связях
Связи приложенные к телу можно отбросить, заменив их действие силой, или системой сил
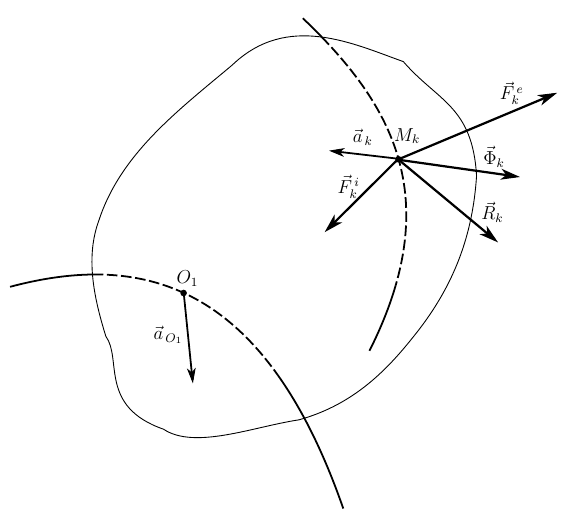
Изображенная на рисунке точка — не свободная точка. Её движение ограничено связью, условно представленной в виде некой поверхности, в пределах которых располагается траектория движения. Приведенная выше аксиома дает возможность убрать поверхность, приложив к точке силу , действие которой эквивалентно наличию поверхности. При этом данная сила не является известной заранее — её величина удовлетворяет ограничениям на положение, скорость и ускорение, накладываемыми связью, ну и, разумеется вектор реакции зависит от приложенных активных сил. Реакции связей подлежат определению в процессе решения задачи. К реакциям связей относится так же и сухое трение, наличие которого даже в простой задаче существенно осложняет процесс её решения.
Исходя из данной классификации, уравнение движения точки (1) переписывают в виде
где — равнодействующая активных сил, приложенных к точке; — равнодействующая реакций, наложенных на точку связей.
А теперь проделаем простейший фокус — ускорение с массой перенесем в другую часть уравнения (2)
и введем обозначение
Тогда, уравнение (2) превращается в
Сила, представляемая вектором (3) называется силой инерции Даламбера. А уравнение (4) выражает принцип Даламбера для материальной точки
Материальная точка находится в равновесии под действием приложенных к ней активных сил, реакций связей и сил инерции
Позвольте, о каком равновесии может идти речь, если точка движется с ускорением? Но ведь уравнение (4) есть уравнение равновесия, и приложив к точке силу (3) мы можем заменить движение точки её равновесием.
Достаточно распространен спор о том, являются ли силы инерции (3) физическими силами. В инженерной практике используется понятие центробежной силы, которая есть сила инерции, связанная с центростремительным (или осестремительным) ускорением, искривляющим траекторию точки. Моё личное мнение таково, что силы инерции есть математический фокус, продемонстрированный выше, позволяющий перейти к рассмотрению равновесия вместо движения с ускорением. Сила инерции (3) определяется ускорением точки, но оно, в свою очередь определяется действием на точку приложенных к ней сил, и в соответствии аксиоматикой Ньютона сила первична. Поэтому ни о какой «физичности» сил инерции говорить не приходится. Природа не знает активных сил, зависящих от ускорения.
Видео:Лекция. Динамика точкиСкачать

2. Принцип Даламбера для твердого тела. Главный вектор и главный момент сил инерции
Теперь распространим уравнение (4) на случай движения твердого тела. В механике его рассматривают как неизменяемую механическую систему, состоящую из множества точек, расстояние между которыми в каждый момент времени остается неизменным. Все точки тела движутся по различным траекториям, но уравнение движения каждой точки соответствует (2)
Силы, действующие на конкретную точку можно разделить на внешние активные , реакции внешних связей , и внутренние силы , представляющие собой силы взаимодействия рассматриваемой точки с остальными точками тела (по сути — внутренние реакции). Все упомянутые силы есть равнодействующие соответствующей группы сил, приложенных к точке. Применим к этому уравнению Принцип Даламбера
где — сила инерции, приложенная к данной точке тела.
Теперь, когда все точки тела находятся в равновесии, мы можем воспользоваться условием равновесия твердого тела, которое дает нам статика
Твердое тело находится в равновесии под действием приложенной к нему системы сил, если главный вектор и главный момент этой системы сил, относительно выбранного центра O, раны нулю
Главный вектор системы сил — это векторная сумма всех сил, приложенных к телу. Сумма сил, приложенных к каждой точке тела определяется последним уравнением, поэтому складывая уравнения для всех точек, в левой его части получим главный вектор
При этом, сумма внутренних сил равна нулю, как следствие из третьего закона Ньютона. Аналогично вычисляем сумму моментов всех сил относительно выбранного произвольного центра O, что дает нам равный нулю главный момент системы сил
причем, как показывается в классическом курсе динамики, сумма моментов внутренних сил, приложенных к системе материальных точек, равна нулю, то есть . Уравнения (5) и (6) уже выражают принцип Даламбера применительно к твердому телу, но лишь с одной необходимой поправкой.
Число активных сил и реакций связей в уравнениях (5) и (6) конечно. Большинство слагаемых в соответствующих суммах равны нулю, ибо активные внешние силы и реакции внешних связей, вообще говоря, приложены лишь в некоторых точках тела. Чего нельзя сказать о силах инерции — силы инерции приложены к каждой точке тела. То есть сумма сил инерции, и сумма их моментов относительно выбранного центра есть суммы интегральные. Систему сил инерции принято сводить к главному вектору и главному моменту и мы можем написать, что
главный вектор и главный момент сил инерции, приложенных к твердому телу. Интегралы (7) и (8) берутся по всему объему тела, а — радиус вектор точки тела относительно выбранного центра O.
Исходя из данного соображения мы можем переписать (5) и (6) в окончательном виде
Уравнения (10) и (11) выражают принцип Даламбера для твердого тела
Теврдое тело находится в равновесии под действием приложенных к нему внешних сил, реакций связей, главного вектора и главного момента сил инерции.
По сути (10) и (11) есть форма записи дифференциальных уравнений движения твердого тела. Они довольно часто применяются в инженерной практике, однако с точки зрения механики, такая форма записи уравнений движения не является самой удобной. Ведь интегралы (7) и (8) можно вычислить в общем виде и придти к более удобным уравнениям движения. В этой связи (10) и (11) следует рассматривать как теоретическую основу построения аналитической механики.
Видео:Теоретическая механика. Динамика. Основные задачи динам. Основное уравнение динамики для мат. точкиСкачать

3. На сцену выходят центр масс и тензор инерции
Вернемся к нашим тензорам и с их помощью вычислим интегралы (7) и (8) для общего случая движения твердого тела. В качестве центра приведения выберем точку O1. Эта точка выбрана в качестве полюса и в ней определен локальный базис связанной с телом системы координат. В одной из прошлых статей мы определили тензорное соотношение для ускорения точки тела в таком движении
Умножив (12) на массу точки со знаком минус, мы получим силу инерции, приложенную к элементу объема твердого тела
Выражение (13) — ковариантное представление вектора силы инерции. Двойное векторное произведение в (12) перепишем в более удобной форме, используя тензор Леви-Чивиты и псевдовекторы угловой скорости и углового ускорения
Подставляем (14) в (13) и берем тройной интеграл по всему объему тела, учитывая, что угловая скорость и угловое ускорение одинаковы в каждой точке этого объема, то есть их можно вынести за знак интеграла
Интеграл в первом слагаемом — это масса тела. Интеграл во втором слагаемом более интересная штука. Вспомним одну из формул курса теоретической механики:
где — контравариантные компоненты радиус-вектора центра масс рассматриваемого тела. Не в даваясь в смысл понятия центра масс просто заменим интегралы в (15) в соответствии с формулой (16), учтя, что во втором слагаемом (15) используются ковариантные компоненты.
Ага, выражение (17) тоже нам знакомо, представим его в более привычной векторной форме
Первое слагаемое в (18) — сила инерции, связанная с поступательным движением тела вместе с полюсом. Второе слагаемое — центробежная сила инерции, связанная с осествемительным ускорением центра масс тела при его движении вокруг полюса. Третье слагаемое — вращательная составляющая главного вектора сил инерции, связанная с вращательным ускорением центра масс вокруг полюса. В общем-то всё находится в соответствии с классическими соотношениями теормеха.
Пытливый читатель скажет: «зачем применять тензоры для получения этого выражения, если в векторном виде оно было бы получено не менее очевидным способом?». В ответ я скажу, что получение формул (17) и (18) — это была разминка. Теперь мы получим выражение главного момента сил инерции относительно выбранного полюса, и тут тензорный подход проявляет себя во всей красе.
Возьмем уравнение (13) и умножим его векторно слева на радиус вектор точки тела относительно полюса. Тем самым мы получим момент силы инерции, приложенной к элементарному объему тела
Снова выполним подстановку (14) в (19), но не станем торопится брать интеграл
Не знаю как у вас, а у меня рябит в глазах, даже при моей привычности к таким формулам. Слагаемые расположены в более естественном порядке — переставлены местами вращательная и центробежная составляющие. Кроме того, от первого слагаемого ко второму возрастает сложность преобразующих выкладок. Будем упрощать их по очереди, сначала упростим первое, сразу взяв интеграл
Тут снова появился радиус вектор центра масс. Здесь ничего сложного — ускорение полюса у нас одно и мы вынесли его за знак интеграла. Интерпретацией займемся чуть позже, а пока преобразуем второе слагаемое (20). В нем мы можем выполнить свертку произведения тензоров Леви-Чивиты по немому индексу k
Здесь мы воспользовались свойством дельты Кронекера заменять свободный индекс вектора/ковектора при выполнении свертки. Теперь возьмет интеграл, учтя, что угловое ускорение постоянно для всего объема тела
Во как! Малопонятный «крокодил», путем формальных тензорных преобразований схлопнулся в компактную формулу. Я лукавлю, мы ввели новое обозначение:
Но это не просто абстрактная формула. По структуре выражения (24) видно, что оно отражает распределение массы тела вокруг полюса и называется оно — тензор инерции твердого тела. Эта величина имеет поистине фундаментальное значение для механики, и о ней мы поговорим подробнее, пока лишь скажу, что (24) — тензор второго ранга, компонентами которого являются осевые и центробежные моменты инерции тела в выбранной системе координат. Он характеризует инертность твердого тела при вращении. Обращаю внимание читателя и на то, как быстро мы получили выражение для тензора инерции, по сути действуя формальным способом. С векторными соотношения без ломки мозгов не обойтись, в этом я убедился на личном опыте.
Ну и наконец обратимся к последнему слагаемому (20). При взятии интеграла в нём тоже должен получится тензор инерции, и мы будем преобразовывать его таким образом, чтобы достичь этой цели. В этой части выражения (20) должно фигурировать соотношение между тензором инерции и угловой скоростью тела. Приступим, для начало свернув произведение тензоров Леви-Чивиты
Налицо существенное упрощение выражения — за счет свойств дельты Кронекера и того, что векторное произведение . Но тензора инерции в (25) не видно. С целью его получить проведем ряд эквивалентных преобразований
Здесь мы снова учли, что , воспользовались свойствами дельты Кронекера и операцией поднятия/опускания индексов при умножении на метрический тензор. И, теперь мы интегрируем (26)
Здесь мы снова видим тензор инерции:
с учетом которого получаем компактное выражение для составляющей главного момента сил инерции, связанного с центробежными силами
Выражение (27) эквивалентно векторно-матричному соотношению:
И хоть меня и переполняют пафосные фразы, отложу их на потом, а сейчас аккуратно выпишу итоговый результат в векторной форме.
В общем случае движения твердого тела главный вектор и главный момент сил инерции, приложенных к твердому телу, равны
А теперь все же восхитимся — не смотря на то, что вышеприведенные преобразования похожи на египетские иероглифы, они формальны, мы просто выполняли действия над индексами тензоров и использовали свойства тензорных операций. Нам не надо было упражняться с векторами, расписывать векторные операции в компонентах и сводить получившиеся проекции векторов к результатам матричных операций. Все матричные и векторные операции конечных выражение вышли у нас автоматически. К тому же, естественным образом получены такие фундаментальные характеристики как координаты центра масс тела и тензор инерции.
Читая лекции студентам я задался целью вывести (29) и (30) оперируя векторами. После того как я перевел стопку бумаги и изрядно поломав мозги я пришел к результату. Поверьте на слово — вышеприведенные преобразования просто семечки, в сравнении с тем, через что надо пройти не используя тензоров.
К тому же, выражения (29) и (30) получены нами для произвольного центра приведения сил, в качестве которого мы взяли полюс O1. Эти выражения помогут нам понять что такое центр масс тела и его важность для механики.
Видео:Физика. 10 класс. Основное уравнение динамики вращательного движения /05.10.2020/Скачать

4. Особая роль центра масс
Используя формулы (29) и (30) вернемся к уравнениям (10) и (11) и, выполнив подстановку, придем к дифференциальным уравнениям движения твердого тела
Чем плохи эти уравнения? А тем, что они зависят друг от друга — ускорение полюса будет зависеть от углового ускорения и угловой скорости тела, угловое ускорение — от ускорения полюса. Вектор определяет положение центра масс тела по отношению к полюсу. А что если мы выберем полюс прямо в центре масс? Тогда ведь и уравнения (31), (32) примут более простой вид
Узнаете эти уравнения? Уравнение (33) — теорема о движении центра масс механической системы, а (34) — динамическое уравнение Эйлера сферического движения. И эти уравнения независимы друг от друга. Таким образом, центр масс твердого тела — это точка, относительно которой силы инерции приводятся к наиболее простому виду. Поступательное движение вместе с полюсом и сферическое вокруг полюса — динамически развязаны. Тензор инерции тела, вычисляется относительно центра масс и называется центральным тензором инерции.
Уравнения (33), (34) в зарубежной литературе называют уравнениями Ньютона-Эйлера, и, в настоящее время весьма активно используются для построения ПО, предназначенного для моделирования механических систем. В рамках цикла о тензорах мы ещё не раз о них вспомним.
Видео:Лекция 06 Динамика твердого телаСкачать

Заключение
Прочитанная вами статья имеет две цели — в ней мы ввели базовые понятия динамики твердого тела и проиллюстрировали мощность тензорного подхода при упрощении громоздких векторных соотношений.
В дальнейшем мы подробнее остановимся на тензоре инерции и изучим его свойства. Погрузившись в дебри аналитической механики, сведем уравнения (31) — (34) к уравнениям движения в обобщенных координатах. В общем, рассказать ещё есть о чем. А пока, благодарю за внимание!
🔥 Видео
Момент импульса. 10 класс.Скачать

Динамика. Введение, дифференциальные уравнения движения точки, прямая и обратная задачи динамики.Скачать

Урок 109. Момент импульса. Закон сохранения момента импульсаСкачать

Семинар 3. Момент силы. Основное уравнение динамики вращательного движения.Скачать

Термех. Общее уравнение динамики - ч.1Скачать
основное уравнение вращательного движенияСкачать
