
Контрольная работа по электрическим машинам.
Основные понятия и формулы
Синхронная машина (СМ) – это электрическая машина переменного тока, у которой частота вращения  ротора и частота
ротора и частота  токов и ЭДС в обмотке якоря связаны строгим соотношением
токов и ЭДС в обмотке якоря связаны строгим соотношением  . В таких машинах в установившемся режиме работы результирующее магнитное поле и ротор вращаются с одинаковой частотой вращения (синхронно).
. В таких машинах в установившемся режиме работы результирующее магнитное поле и ротор вращаются с одинаковой частотой вращения (синхронно).
Явнополюсная и неявнополюсная СМ – машина с явно и неявно выраженными полюсами на роторе, где расположена обмотка возбуждения.
Номинальные данные: полная мощность  (для двигателей – мощности
(для двигателей – мощности  механической энергии на валу, линейные напряжения
механической энергии на валу, линейные напряжения  и ток
и ток  коэффициент мощности
коэффициент мощности  , частота , частота вращения
, частота , частота вращения  ротора, напряжение
ротора, напряжение  и ток
и ток  обмотки возбуждения.
обмотки возбуждения.
Электромагнитные мощность и момент неявнополюсной СМ:

где  — число обмотки якоря,
— число обмотки якоря,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
Полная активная и реактивная мощности:

Расчеты, анализ электромагнитных процессов в машине, построение векторных диаграмм существенно упрощаются, ели пользоваться относительными значениями электрических величин. Приняв за базисные (единичные) полную номинальную мощность , номинальные фазные напряжение и ток , ток возбуждения  при котором
при котором  , и полное сопротивление фазной обмотки
, и полное сопротивление фазной обмотки  имеем
имеем

Угловые характеристики – зависимости  и
и  при
при  и неизменных напряжений
и неизменных напряжений  и частоте
и частоте  сети (см ур. 3.1). В относительных единицах.
сети (см ур. 3.1). В относительных единицах.

Максимальная мощность и момент при :


где  -максимальная мощность при
-максимальная мощность при  — номинальная активная мощность генератора,
— номинальная активная мощность генератора,  — номинальный коэффициент мощности.
— номинальный коэффициент мощности.
Для неявнополюсных СМ  .
.
Область устойчивой работы:

Имеется трехфазный синхронный генератор мощности  с напряжением на выходе
с напряжением на выходе  (обмотка статора соединена «звездой») при частоте тока 50 Гц и частоте вращения
(обмотка статора соединена «звездой») при частоте тока 50 Гц и частоте вращения  . КПД генератора при номинальной нагрузке
. КПД генератора при номинальной нагрузке  (табл. 1). Генератор работает на нагрузку с
(табл. 1). Генератор работает на нагрузку с  . Требуется определить активную мощность генератора при номинальной нагрузке ток в обмотке статора
. Требуется определить активную мощность генератора при номинальной нагрузке ток в обмотке статора  , мощность первичного двигателя
, мощность первичного двигателя  и вращающий момент
и вращающий момент  при непосредственном механическом соединении валов генератора и двигателя.
при непосредственном механическом соединении валов генератора и двигателя.
, кВА
кВ
%
об. мин
Трехфазны синхронный двигатель номинальной мощность  и числом полюсов
и числом полюсов  работает от сети напряжением (обмотки статора соединены «звездой»). КПД двигателя , коэффициент мощности при опережающем токе статора. Перегрузочная способность двигателя —
работает от сети напряжением (обмотки статора соединены «звездой»). КПД двигателя , коэффициент мощности при опережающем токе статора. Перегрузочная способность двигателя —  , а его пусковые параметры определены кратности пускового тока
, а его пусковые параметры определены кратности пускового тока  и кратностью пускового момента
и кратностью пускового момента  . Значения этих величин приведены в таблице 2. Требуется определить: потребляемые двигателем из сети активную и ток , развиваемый двигателем при номинальной нагрузке вращающий момент
. Значения этих величин приведены в таблице 2. Требуется определить: потребляемые двигателем из сети активную и ток , развиваемый двигателем при номинальной нагрузке вращающий момент  , суммарные потери
, суммарные потери  , пусковой момент
, пусковой момент  и пусковой ток
и пусковой ток  , а так же вращающий момент
, а так же вращающий момент  , при котором двигатель выпадает из синхронизма.
, при котором двигатель выпадает из синхронизма.

(Вариант задачи принимается по последней цифре шифра зачетной книжки)
Определить напряжение на зажимах трехфазного синхронного генератора, работающего в режиме холостого хода, при соединении обмотки статора по схеме «треугольник» и «звезда», если известно, что частота  Гц, число последовательно соединенных витков фазы обмотки статора
Гц, число последовательно соединенных витков фазы обмотки статора  , обмоточный коэффициент
, обмоточный коэффициент  , максимально значение магнитного потока одной фазы
, максимально значение магнитного потока одной фазы  Вб.
Вб.
Трехфазный синхронный генератор расчетной мощностью  мВА характеризуется следующими данными: номинальное напряжение
мВА характеризуется следующими данными: номинальное напряжение  , , коэффициент мощности
, , коэффициент мощности  , активное сопротивление фазы обмотки статора
, активное сопротивление фазы обмотки статора  Ом, схема соединения обмотки статора – «звезда». Определить КПД генератора, если потери в магнитопроводе
Ом, схема соединения обмотки статора – «звезда». Определить КПД генератора, если потери в магнитопроводе  кВт, добавочные потери составляют 5 % от номинальной мощности, механические потери
кВт, добавочные потери составляют 5 % от номинальной мощности, механические потери  . Напряжение возбудителя
. Напряжение возбудителя  В, ток возбуждения в номинальном режиме
В, ток возбуждения в номинальном режиме  А, коэффициент полезного действия возбудителя
А, коэффициент полезного действия возбудителя  .
.
Ротор трехфазного синхронного генератора имеет 12 полюсов. Частота напряжения на зажимах генератора  = 50 Гц. Полезная мощность приводного двигателя 5 кВт. Определить вращающий момент на валу генератора.
= 50 Гц. Полезная мощность приводного двигателя 5 кВт. Определить вращающий момент на валу генератора.
Трехфазный синхронный генератор вырабатывает напряжение частотой = 50 Гц. Число полюсов 2р = 2 . Приводной двигатель создает вращающий момент на валу  Нм. Определить полезную мощность приводного двигателя.
Нм. Определить полезную мощность приводного двигателя.
Вращающий момент на валу трехфазного синхронного генератора — 48 Нм. Полезная мощность приводного двигателя 5 кВт. Частота напряжения на зажимах генератора = 50 Гц. Определить число полюсов генератора.
Трёхфазный четырехполюсный синхронный двигатель имеет следующие данные: номинальная мощность Рном = 500 кВт, номинальное напряжение UH0M = 0.66 кВ, коэффициент полезного действия  ном = 0,95 , коэффициент мощности
ном = 0,95 , коэффициент мощности  (опережающий ток), частота тока = 50 Гц. Определить частоту вращения ротора, номинальный вращающий момент, активную и реактивную составляющие мощности, потребляемый из сети ток статора и его реактивную составляющую.
(опережающий ток), частота тока = 50 Гц. Определить частоту вращения ротора, номинальный вращающий момент, активную и реактивную составляющие мощности, потребляемый из сети ток статора и его реактивную составляющую.
Трехфазный синхронный двигатель включен в сеть напряжением 220 В, потребляет линейный ток  А и развивает мощность на валу Рном = 25 кВт. КПД двигателя = 0,95 % . Определить реактивную мощность, потребляемую двигателем из сети.
А и развивает мощность на валу Рном = 25 кВт. КПД двигателя = 0,95 % . Определить реактивную мощность, потребляемую двигателем из сети.
Трехфазный синхронный двигатель включен в сеть напряжением UH0M = 600 В и потребляет ток  А, КПД двигателе H0M = 0,9, коэффициент мощности . Определить суммарные потери мощности в двигателе.
А, КПД двигателе H0M = 0,9, коэффициент мощности . Определить суммарные потери мощности в двигателе.
Трехфазный синхронный двигатель включение сеть напряжением 380 В и развивает на валу мощность 75 кВт. КПД двигателя = 0,92 %, коэффициент мощности. Определить реактивную составляющую потребляемого из сети тока.
Полная мощность, потребляемая из сети синхронным двигателем, S = 45 кВА.
Коэффициент мощности . Суммарные потери мощности  кВт. Определить коэффициент полезного действия двигателя.
кВт. Определить коэффициент полезного действия двигателя.
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА
Основные понятия и формулы
Машина постоянного тока (МПТ) — электрическая машина, обмотка якоря которой соединена с электрической сетью постоянного тока с помощью механического (коллектора) или полупроводникового преобразователя частоты. Машины постоянного тока классифицируются: а) по назначению — генераторы (ГПТ) и двигатели (ДПТ) постоянного тока; б) по способам возбуждения (в зависимости от того, как обмотка возбуждения включена по отношению к обмотке якоря): с независимым, параллельным, последовательным, смешанным возбуждением (МПТ имеет одну последовательную, и одну параллельную обмотки возбуждения), с постоянными магнитами.
Номинальный режим — режим работы МПТ при условиях, для которых она предназначена заводом-изготовителем.
Соответствующие номинальному режиму мощность, напряжение на главных зажимах машины, ток, частота вращения, КПД называются номинальными и указываются на заводской табличке (паспорте), прикрепленной к корпусу машины.
Основные формулы, описывающие электромагнитные процессы в МПТ как в генераторном, так и двигательном режимах работы, следующие.
ЭДС якоря (ЭДС параллельной ветви обмотки якоря)
где  — постоянная, N — число активных проводников в обмотке якоря, р — число пар главных полюсов, — число пар параллельных ветвей обмотки якоря,
— постоянная, N — число активных проводников в обмотке якоря, р — число пар главных полюсов, — число пар параллельных ветвей обмотки якоря,  угловая скорость вращения якоря
угловая скорость вращения якоря  .
.
Магнитный потоп на полюс

где  — среднее значение магнитной индукции в воздушном зазоре под главным полюсом,
— среднее значение магнитной индукции в воздушном зазоре под главным полюсом,  — расчетная длина сердечника якоря,
— расчетная длина сердечника якоря,  — полюсное деление (часть окружности якоря, приходящийся на один полюс).
— полюсное деление (часть окружности якоря, приходящийся на один полюс).
где  ток якоря.
ток якоря.
Мощность потерь в МПТ
где Рпмх, Рпм , Рпэ — мощность механических, магнитных (мощность потерь в стали сердечника якоря) и электрических (в обмотке якоря) потерь соответственно, причем  , где
, где  — внутренние сопротивление цепи якоря
— внутренние сопротивление цепи якоря —мощность потерь на возбуждение в МПТ с электромагнитным возбуждением, где
—мощность потерь на возбуждение в МПТ с электромагнитным возбуждением, где  и UB — ток в цепи возбуждения и напряжение на ее зажимах, a
и UB — ток в цепи возбуждения и напряжение на ее зажимах, a  — эквивалентное
— эквивалентное
сопротивление этой цепи  — мощность добавочных потерь, а
— мощность добавочных потерь, а  —
—
относительное значение тока МПТ.
Коэффициент полезного действия (КПД)
где  — мощность энергии, подведенной к МПТ, Р2 — полезная мощность МПТ.
— мощность энергии, подведенной к МПТ, Р2 — полезная мощность МПТ.
Генератор постоянного тока
Уравнение напряжения генератора
Полезная электрическая мощность
где ток генератора
— при параллельном или смешанном возбуждении,
— при других способах возбуждения
Мощность подведенной механической энергии
где М1 — вращающий момент на валу первичного двигателя.
— холостого хода  при I = 0 и
при I = 0 и  = const;
= const;
— внешняя  при
при  и n = const;
и n = const;
— регулировочная  при U = const и = const, где RB — сопротивление обмотки возбуждения, Ррв — сопротивление регулировочного реостата в цепи возбуждения.
при U = const и = const, где RB — сопротивление обмотки возбуждения, Ррв — сопротивление регулировочного реостата в цепи возбуждения.
Двигатель постоянного тока

где М0 — момент холостого хода, обусловленный и механическими потерями в двигателе, М2 — полезный момент на валу, J — момент инерции вращающихся масс. В установившемся режиме работы двигателя (при = const)

Полезная механическая мощность на валу
Мощность электрической энергии, потребляемой из сети
— при независимом возбуждении,
— при других способах возбуждения.
где Рпв — мощность потерь на возбуждение.
— при параллельном или смешанном возбуждении,
— при других способах возбуждения.
Ток якоря в установившемся режиме
где I0м — ток якоря в режиме холостого хода.
Угловая скорость вращения в установившемся режиме
Начальный пусковой ток якоря
Где  — сопротивление пускового реостата в момент пуска.
— сопротивление пускового реостата в момент пуска.
Начальная кратность пускового тока

где  — пусковой ток.
— пусковой ток.
ЭДС якоря Ея, электромагнитный момент М, мощность потерь  и КПД определяют по формулам (4.1), (4.4), (4.5) и (4.6).
и КПД определяют по формулам (4.1), (4.4), (4.5) и (4.6).
Двигатель постоянного тока номинальной мощности Рном включен в сеть напряжением UH0M и при номинальной нагрузке потребляет ток /ном развивая при этом частоту вращения  (табл.1). Требуется определить: мощность Р1 ном потребляемую двигателем из сети, суммарные потери мощности
(табл.1). Требуется определить: мощность Р1 ном потребляемую двигателем из сети, суммарные потери мощности  , КПД
, КПД  , момент на валу двигателя М2ном.
, момент на валу двигателя М2ном.
 , кВт
, кВт
 , В
, В
 , А
, А
,об/мИН
Генератор постоянного тока независимого возбуждения с номинальным напряжением UH0M и номинальной частотой вращения имеет простую волновую обмотку якоря, состоящую из N проводников. Число полюсов генератора 2р = 4, сопротивление обмоток в цепи якоря при рабочей температуре  , основной магнитный поток Ф (табл.2). Для номинального режима работы генератора определить: ЭДС Еа , ток нагрузки, полезную мощность Рн, электромагнитную мощность Рэм и электромагнитный момент Мэм . Размагничивающим действием реакции якоря пренебречь.
, основной магнитный поток Ф (табл.2). Для номинального режима работы генератора определить: ЭДС Еа , ток нагрузки, полезную мощность Рн, электромагнитную мощность Рэм и электромагнитный момент Мэм . Размагничивающим действием реакции якоря пренебречь.
В
,Об/мИН
,Ом
(Вариант задачи принимается по последней цифре шифра зачетной книжки)
При напряжении UH0M = 220 В двигатель постоянного тока потребляет из сети ток = 20 А. Мощность на валу двигателя Р2 = 3,2 кВт. Определить суммарные потери мощности в двигателе.
При напряжении UU0M = 220 В двигатель параллельного возбуждения потребляет ток = 20 А и вращается с частотой п = 1400 об/мин. Определить частоту вращения двигателя после введения добавочного сопротивления в цепь якоря  , если известно, что
, если известно, что  = 0,1 Ом, а сопротивление обмотки возбуждения
= 0,1 Ом, а сопротивление обмотки возбуждения  = 100 Ом.
= 100 Ом.
Для двигателя постоянного тока параллельного возбуждения известны технические данные: номинальная мощность Рп = 10 кВт, номинальное напряжение UH0M = 220 В, сопротивление цени якоря при рабочей температуре = 0,3 Ом, сопротивление цепи возбуждения при рабочей температуре = 85 Ом, КПД двигателя  = 0,795. Определить: потребляемую мощность, ток якоря, ЭДС, электрические потери в цепи якоря, потери в цепи возбуждения, суммарные потери мощности, потери холостого хода.
= 0,795. Определить: потребляемую мощность, ток якоря, ЭДС, электрические потери в цепи якоря, потери в цепи возбуждения, суммарные потери мощности, потери холостого хода.
Тяговый двигатель постоянного тока последовательного возбуждения имеет — номинальную мощность Рном — 52 кВт, коэффициент полезного действия  81 %, частоту вращения = 650 об/мин, номинальное напряжение UH0M = 550 В, общее сопротивление обмоток якоря и возбуждения
81 %, частоту вращения = 650 об/мин, номинальное напряжение UH0M = 550 В, общее сопротивление обмоток якоря и возбуждения  = 0,095 Ом. Определить: потребляемую мощность, ток двигателя, полезный момент на валу, ЭДС, суммарные потери мощности.
= 0,095 Ом. Определить: потребляемую мощность, ток двигателя, полезный момент на валу, ЭДС, суммарные потери мощности.
Двигатель постоянного тока смешанного возбуждения имеет следующие технические данные: номинальная мощность Рном = 25 кВт, номинальное напряжение UH0M — 220 В, сопротивление якорной цепи га = 0,111 Ом, сопротивление последовательной обмотки возбуждения гвс = 0,0048 Ом, сопротивление параллельной обмотки возбуждения гвш = 48,4 Ом, коэффициент полезного действия г = 0,86. Определить: номинальный ток двигателя, ток якоря, потребляемую мощность, ЭДС, электрические потери в параллельной обмотке возбуждения.
Для генератора постоянного тока независимого возбуждения известны технические данные: номинальное напряжение UH0M = 230 В, потребляемая мощность Рх = 45 кВт, ток возбуждения /в = 20 А, сопротивление обмотки возбуждения и якоря соответственногв = ЮООм иг, = 0,12 Ом, коэффициент полезного действия г = 0,86 . Определить ЭДС якорной обмотки Еа, электромагнитную мощность Рэм, потери в обмотке возбуждения Рэлв, суммарные потери мощности £ ДР-
Для генератора постоянного тока независимого возбуждения известны технические данные: номинальная мощность Рном = 40 кВт, номинальное напряжение 1/Ном = 230 В, сопротивление цепи якоря при рабочей температуре га = 0,12 Ом, коэффициент полезного действия ц = 0,86, номинальная частота вращения п = 1470 об/мин. Определить: номинальный ток генератора Ашм ‘ сопротивление нагрузки гн, ЭДС генератора Еа, суммарные потери мощности £ДР, электромагнитную мощность Рэм , электромагнитный момент Мэм.
Генератор параллельного возбуждения работает на сеть напряжением Уном = 120 В. Сопротивления обмоток якоря и возбуждения в рабочем режиме га — 0,08 Ом, гв = 18 Ом, сопротивление нагрузки гн = 1,2 Ом. Определить: ток нагрузки генератора, ток в цепи возбуждения, ток якоря, ЭДС генератора, полезную мощность, потери в цепи якоря, потери в цепи возбуждения.
Для генератора постоянного тока параллельного возбуждения известны технические данные: номинальное напряжение UH0M = 115 В, номинальный ток/ном = 20 А, сопротивление цепи якоря работающей машины га = 0,4 Ом, сопротивление цепи возбуждения работающей машины гв = 145 Ом, коэффициент полезного действия rj = 0,8 , частота вращения п = 2850 об/мин. Определить: номинальную мощность генератора, мощность первичного двигателя, ток якоря, электромагнитную мощность, ЭДС генератора, электромагнитный момент.
Для оператора постоянною тока смешанного возбуждения известны технические данные: номинальная мощность Рном = 10 кВт, номинальное напряжение UH0M = 220 В, ЭДС £’а = 230 В, ток возбуждения /в = 2 А, сопротивление последовательной обмотки возбуждения гвс = 0,15 Ом, частота вращения п = 1470 об/мин. Определить: ток якоря, сопротивление якорной цепи, сопротивление цепи возбуждения (параллельной), электромагнитную мощность, электромагнитный момент.
Синхронный двигатель
Принцип действия синхронного двигателя.
Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя.
Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток . Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС
. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС  и
и  .
.
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС  , которая направлена против напряжения сети
, которая направлена против напряжения сети  . Сумма ЭДС
. Сумма ЭДС  с учётом падения напряжения на активном сопротивлении обмотки статора
с учётом падения напряжения на активном сопротивлении обмотки статора  уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора.
В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
 , (4.4)
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что =0).

Векторная диаграмма синхронного двигателя.
Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол  от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор , где
, где  — угол сдвига фаз между током и ЭДС.
— угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок  , где
, где  —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
—масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя  .
.
Механический момент на валу двигателя  ,
,
где  — угловая скорость ротора; Мтах =
— угловая скорость ротора; Мтах =  — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
— максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики.
В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90° Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя.
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС  остаются неизменными (рис. 14.17).
остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что , конец вектора токаскользит по прямой cd.
, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), = , ток
, ток  отстаёт по фазе
отстаёт по фазе  от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
 и ток
и ток  является чисто активным.
является чисто активным.
Наоборот, при перевозбуждении  и вектор тока
и вектор тока  опережает по фазе вектор напряжения ,
опережает по фазе вектор напряжения ,  , ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при
, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при  .
.
U – образные характеристики.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается  (рис.4.17).
(рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.

Рис. 4.17 и 4.18
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы.
Пуск синхронного двигателя.
Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв.
Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный.
В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Синхронные машины
Если во вращающемся магнитном поле разместить на валу ротора магнит так, чтобы ось, соединяющая его полюса, была направлена вдоль вектора индукции магнитного поля, то вращающееся магнитное поле вовлекает во вращение магнит вместе с валом ротора, который вращается синхронно с магнитным полем. Однако для этого необходимо раскрутить ротор до скорости вращения поля (условие синхронизма). На ротор действует вращающий момент, и энергия тока превращается в механическую энергию электродвигателя, который получил название синхронного.
Синхронные машины используются в качестве источников электрической энергии (генераторов), электродвигателей и синхронных компенсаторов.
Синхронные генераторы гидроэлектростанций вращаются с помощью гидротурбин и носят название гидрогенераторов. Кроме электростанций синхронные генераторы находят применение в установках, требующих автономного источника питания.
Синхронные двигатели переменного тока используются с механизмами средней и большой мощности при редких пусках, требующих постоянной частоты вращения. К таким механизмам относятся компрессоры, вентиляторы, насосы и т.д.
Синхронный компенсатор предназначается для улучшения коэффициента мощности электротехнических установок (компенсации индуктивной реактивной мощности).
Дополнительно по теме
Схема замещения синхронного двигателя и векторная диаграмма
Конструктивно синхронная машина состоит из статора и ротора. Статор аналогичен статору асинхронной машины, а ротор представляет собой постоянный магнит, поле которого создается обмоткой возбуждения, по которой пропускается постоянный ток. Питание обмотки возбуждения осуществляется через скользящий контакт между контактными кольцами и неподвижными щетками. Особенностью синхронной машины является возможность работы как в режиме двигателя, так и в режиме генератора.
Частота ЭДС переменного тока в синхронной машине зависит от частоты вращения ротора и числа пар полюсов, f1 = рn/60. Действующее значение ЭДС, индуцируемой в проводниках
Взаимодействие вращающегося поля статора и поля постоянного магнита ротора вызывает появление вращающего момента, вследствие чего ротор вращается в том же направлении, что и поле статора (n1=n). Скольжение синхронной машины равно нулю.
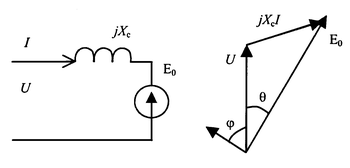
На рисунке Хс — синхронное индуктивное сопротивление; q — угол нагрузки
В соответствии со схемой уравнение имеет вид:
Характеристика зависимости момента двигателя от угла нагрузки имеет вид синусоиды и выражает работу как двигательного, так и генераторного режима.
С целью получения запаса устойчивости за номинальный момент синхронного двигателя принимается 0,5Мн, которому соответствует угол q=30°.
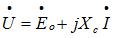
Важным преимуществом синхронного двигателя является способность регулировать потребляемую из сети реактивную мощность путем изменения тока возбуждения. Рассмотрим зависимости тока статора двигателя от тока возбуждения.
При перевозбуждении Iдв имеет емкостной характер, а при недовозбуждении — индуктивный. Таким образом, синхронный двигатель может быть использован в качестве компенсирующего устройства для регулирования реактивной мощности.
Характеристики имеют границу устойчивости, вдоль которой уменьшение тока возбуждения приведет к опрокидыванию двигателя или «выпаданию из синхронизма». Граница устойчивости соответствует режиму Мдв= Мген.
Недостатком синхронного двигателя является необходимость возбудителя для запуска, так как при равенстве синхронной частоты вращения поля статора и частоты вращения поля ротора пусковой момент отсутствует. Наиболее распространен асинхронный запуск. В этом случае на полюсах двигателя размещается короткозамкнутая обмотка. При пуске статор подключают к сети. Возникающее магнитное поле индуцирует в этой обмотке ЭДС и токи, в результате чего создается электромагнитный момент, как и у асинхронного двигателя. При этом обмотка возбуждения отключена от источника постоянного тока, но замкнута на активное сопротивление с целью уменьшения напряжения на ее зажимах при пуске. При достижении двигателем частоты вращения, близкой к синхронной, обмотка возбуждения переключается на источник постоянного тока. В этом случае говорят, что двигатель «втянулся в синхронизм».
Генераторный режим синхронной машины
Так как выражения электромагнитной мощности и момента у синхронной машины аналогичны и в двигательном и в генераторном режимах, то достаточно рассмотреть генераторный режим синхронной машины.
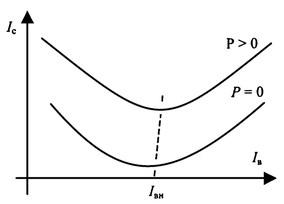
При работе синхронной машины в качестве генератора можно регулировать магнитный поток Фо и пропорциональную ему Ео, изменяя ток возбуждения.
 Зависимость Ео=f(Iв) называется характеристикой холостого хода генератора.
Зависимость Ео=f(Iв) называется характеристикой холостого хода генератора.
Остаточная ЭДС у синхронного генератора равна 5-10 В.
Совпадение токов в проводниках по фазе с ЭДС будет только при активной нагрузке,
При включении статора на сопротивление нагрузки по обмотке пойдет ток, который создаст поле, вращающееся относительно статора и неподвижное относительно поля возбуждения основного потока ротора Фо. Совпадение токов в проводниках по фазе с ЭДС будет только при активной нагрузке, при индуктивной ток отстает на 90°, при емкостной опережает на 90°. Рост напряжения при емкостной нагрузке связан с подмагничивающим действием реакции якоря (статора), а снижение при индуктивной нагрузке — размагничиванием.
Упрощенное уравнение электрического состояния одной фазы синхронного генератора без учета поля рассеяния якоря имеет вид:

где Ео — ЭДС холостого хода.
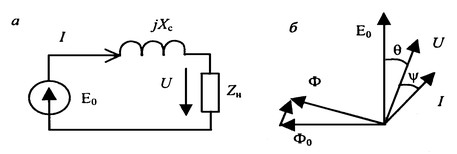 Данному выражению соответствуют схема замещения (рис. а) и векторная диаграмма (рис. б). Из диаграммы следует, что Ео соответствует магнитному потоку ротора Фо, а напряжение U — результирующему магнитному потоку Ф. Отсюда следует, что в генераторном режиме Фо опережает Ф на угол q.
Данному выражению соответствуют схема замещения (рис. а) и векторная диаграмма (рис. б). Из диаграммы следует, что Ео соответствует магнитному потоку ротора Фо, а напряжение U — результирующему магнитному потоку Ф. Отсюда следует, что в генераторном режиме Фо опережает Ф на угол q.
Основной режим работы генератора нагрузочный. Пренебрегая потерями в сопротивлении обмотки якоря, получим из векторной диаграммы значение cosy между напряжением и Еo:

С учетом этого выражения получим зависимость для определения электромагнитной мощности:

Момент равен отношению мощности к частоте вращения:

Выражение в скобках соответствует максимальному моменту Мmax, причем .
.
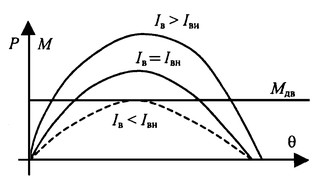 Зависимости электромагнитной мощности и момента синхронной машины при различных токах возбуждения показаны на рисунке.
Зависимости электромагнитной мощности и момента синхронной машины при различных токах возбуждения показаны на рисунке.
В синхронном генераторе с активно-реактивной нагрузкой при определении электромагнитного момента необходимо учитывать фазовый сдвиг тока относительно магнитного потока или напряжения. Тогда выражение для момента
Синхронный генератор в качестве источника электрической энергии переменного тока включают в распределительную сеть параллельно. При параллельной работе генератора с системой большой мощности его частота и напряжение, а также угловая скорость должны оставаться неизменными при любых изменениях как нагрузки, так и тока возбуждения и момента первичного двигателя. Активную мощность, отдаваемую генератором в сеть, можно регулировать только изменением момента первичного двигателя, а реактивную — изменением тока возбуждения.