В данной статье мы расскажем о методах, видах, условиях и определениях исследований решений систем линейных уравнений, что такое метод Кронекера-Капели, а также приведем примеры.
- Общие сведения (определения, условия, методы, виды)
- Ранг матрицы и его свойства
- Системы линейных алгебраических уравнений: основные понятия, виды
- Определение СЛАУ
- Виды систем
- Матричная запись систем уравнений
- Расширенная матрица системы
- Метод Гаусса — определение и вычисление с примерами решения
- Алгоритм решения системы m линейных уравнений с n неизвестными методом Гаусса
- Исследование совместности и определённости системы. Теорема Кронекера-Капелли
- Однородные системы линейных уравнений
- Фундаментальная система решений. Общее решение неоднородной системы линейных уравнений
- Определение метода Гаусса
- Вычисление метода Гаусса
Общие сведения (определения, условия, методы, виды)
Системы линейных алгебраических уравнений с n неизвестными могут иметь:
- единственное решение;
- бесконечное множество решение (неопределенные СЛАУ);
- ни одного решения (несовместные СЛАУ).
Пример 1
Система x + y + z = 1 2 x + 2 y + 2 z = 3 не имеет решений, поэтому она несовместна.
Система x + y = 1 2 x + 7 y = — 3 имеет единственное решение x = 2 ; y = 1 .
Система x + y = 1 2 x + 2 y = 2 3 x + 3 y = 3 имеет бесконечное множество решений x = t y = 1 — t при — ∞ t ∞ .
Перед решением системы уравнений необходимо исследовать систему, т.е. ответить на следующие вопросы:
- Совместна ли система?
- Если система совместна, то, какое количество решений она имеет — одно или несколько?
- Как найти все решения?
Если система малоразмерна при m = n , то ответить на поставленные вопросы можно при помощи метода Крамера:
- если основной определитель системы, то система совместна и имеет единственное решение, которое вычисляется методом Крамера;
- если, и один из вспомогательных определителей, то система не является совместной, т.е. не имеет решений;
- если и все, и один из коэффициентов СЛАУ, то система не является определенной и имеет бесконечное множество решений.
Ранг матрицы и его свойства
Бывают случаи, которые выбиваются из представленных вариантов решения СЛАУ, например, линейные уравнения с большим количеством уравнений и неизвестных.
Для такого варианта решения существует ранг матрицы, который представляет собой алгоритм действий в случае решения системы матрицы, когда
В математике выделяют следующие подходы к определению ранга матрицы:
- при помощи понятия линейной зависимости/независимости строк/столбцов матрицы. Ранг равен максимальному количеству независимых строк (столбцов) матрицы
- при помощи понятия минора матрицы в качестве наивысшего порядка минора, который отличается от нуля. Минор матрицы порядка k — определитель k-го порядка, составленный из элементов, которые стоят на пересечении вычеркиваемых k-строк и k-столбцов матрицы;
- при помощи метода Гаусса. По завершении прямого хода ранг матрицы равняется количеству ненулевых строк.
Обозначение ранга матрицы: r ( A ) , r g ( A ) , r A .
Свойства ранга матрицы:
- квадратная невырожденная матрица обладает рангом, который отличается от нуля;
- если транспонировать матрицу, то ранг матрицы не изменяется;
- если поменять местами 2 параллельные строки или 2 параллельных столбца, ранг матрицы не изменяется;
- при удалении нулевого столбца или строки ранг матрицы не изменяется;
- ранг матрицы не изменяется, если удалить строку или столбец, которые являются линейной комбинацией других строк;
- при умножении все элементов строки/столбца на число k н е р а в н о н у л ю ранг матрицы не изменяется;
- ранг матрицы не больше меньшего из ее размеров: r ( А ) ≤ m i n ( m ; n ) ;
- когда все элементы матрицы равны нулю, то только тогда r ( A ) = 0 .
Пример 2
А 1 = 1 1 1 2 2 2 3 3 3 , B 1 = 1 0 0 0 0 0
r ( A 1 ) = 1 , r ( B 1 ) = 1
А 2 = 1 2 3 4 0 5 6 7 0 0 0 0 ; В 2 = 1 1 3 1 2 1 4 3 1 2 5 0 5 4 13 6
Системы линейных алгебраических уравнений: основные понятия, виды
Определение СЛАУ
Системой линейных алгебраических уравнений (СЛАУ) называется система вида:
$$left<begin a_ cdot x_+a_ cdot x_+ldots+a_ cdot x_=b_ \ a_ cdot x_+a_ cdot x_+ldots+a_ cdot x_=b_ \ ldots ldots ldots ldots ldots ldots ldots ldots ldots ldots ldots ldots ldots ldots . . \ a_ cdot x_+a_ cdot x_+ldots+a_ cdot x_=b_ endright.$$
Упорядоченный набор значений $$left<x_^, x_^, ldots, x_^right>$$ называется решением системы, если при подстановке в уравнения все уравнения превращаются в тождество.
Задание. Проверить, является ли набор $$ решением системы $left<begin 3 x-2 y=-6 \ 5 x+y=3 endright.$
Решение. Подставляем в каждое из уравнений системы $x=0$ и $y=3$:
$$5 x+y=3 Rightarrow 5 cdot 0+3=3 Rightarrow 3=3$$
Так как в результате подстановки получили верные равенства, то делаем вывод, что заданный набор является решением указанной СЛАУ.
Ответ. Набор $$ является решением системы $left<begin 3 x-2 y=-6 \ 5 x+y=3 endright.$
Виды систем
СЛАУ называется совместной, если она имеет, хотя бы одно решение.
В противном случае система называется несовместной.

Система $left<begin 3 x-2 y=-6 \ 5 x+y=3 endright.$ является совместной, так как она имеет, по крайней мере, одно решение $x=0$, $y=3$
Система $left<begin 5 x+y=-6 \ 5 x+y=3 endright.$ является несовместной, так как выражения, стоящие в левых частях уравнений системы равны, но правые части не равны друг другу. Ни для каких наборов $$ это не выполняется.
Система называется определённой, если она совместна и имеет единственное решение.
В противном случае (т.е. если система совместна и имеет более одного решения) система называется неопределённой.
Система называется однородной, если все правые части уравнений, входящих в нее, равны нулю одновременно.
Система называется квадратной, если количество уравнений равно количеству неизвестных.
Система $left<begin 3 x-2 y=-6 \ 5 x+y=3 endright.$ квадратная, так как неизвестных две и это число равно количеству уравнений системы.
Матричная запись систем уравнений
Исходную СЛАУ можно записать в матричном виде:
Задание. Систему $left<begin x-y+z-4 t=0 \ 5 x+y+t=-11 endright.$ записать в матричной форме и выписать все матрицы, которые ей соответствуют.
Решение. Заданную СЛАУ записываем в матричной форме $A. X=B$ , где матрица системы:
$$A=left(begin 1 & -1 & 1 & -4 \ 5 & 1 & 0 & 1 endright)$$
то есть, запись СЛАУ в матричной форме:
$$left(begin 1 & -1 & 1 & -4 \ 5 & 1 & 0 & 1 endright)left(begin x \ y \ z \ t endright)=left(begin 0 \ -11 endright)$$
Расширенная матрица системы
Задание. Записать матрицу и расширенную матрицу системы $left<begin 2 x_+x_-x_=4 \ x_-x_=5 endright.$
Решение. Матрица системы $A=left(begin 2 & 1 & -1 \ 1 & -1 & 0 endright)$ , тогда расширенная матрица $tilde=(A mid B)=left(begin 2 & 1 & -1 & 4 \ 1 & -1 & 0 & 5 endright)$
Метод Гаусса — определение и вычисление с примерами решения
Содержание:
Базисные и свободные переменные:
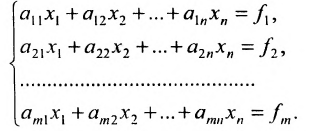
Пусть задана система
Элементарными преобразованиями системы линейных уравнений называются следующие преобразования:
- исключение из системы уравнения вида

- умножение обеих частей одного из уравнений системы на любое действительное число ;
- перестановка местами уравнений системы;
- прибавление к обеим частям одного из уравнений системы соответствующих частей другого уравнения, умноженных на любое действительное число не равное нулю.

 ;
;Элементарные преобразования преобразуют данную систему уравнений в эквивалентную систему, т.е. в систему, которая имеет те же решения, что и исходная.
Для решения системы т линейных уравнений с т неизвестными удобно применять метод Гаусса, называемый методом последовательного исключения неизвестных, который основан на применении элементарных преобразований системы. Рассмотрим этот метод.
Предположим, что в системе (6.1.1) . Если это не так, то переставим уравнения системы так, чтобы
. Если это не так, то переставим уравнения системы так, чтобы  .
.
На первом шаге метода Гаусса исключим неизвестное  из всех уравнений системы (6.1.1), начиная со второго. Для этого последовательно умножим первое уравнение системы на множители
из всех уравнений системы (6.1.1), начиная со второго. Для этого последовательно умножим первое уравнение системы на множители
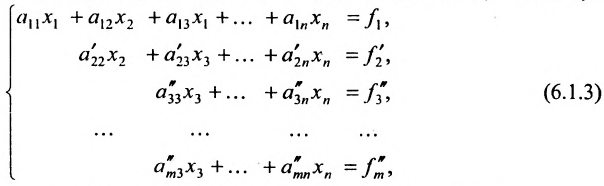
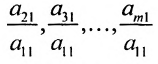 и вычтем последовательно преобразованные уравнения из второго, третьего, . последнего уравнения системы (6.1.1). В результате получим эквивалентную систему:
и вычтем последовательно преобразованные уравнения из второго, третьего, . последнего уравнения системы (6.1.1). В результате получим эквивалентную систему:
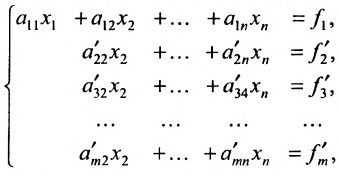 (6.1.2)
(6.1.2)
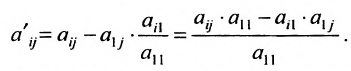
в которой коэффициенты  вычислены по формулам:
вычислены по формулам:
 На втором шаге метода Гаусса исключим неизвестное
На втором шаге метода Гаусса исключим неизвестное  из всех уравнений системы (6.1.2) начиная с третьего, предполагая, что
из всех уравнений системы (6.1.2) начиная с третьего, предполагая, что  (в противном случае, переставим уравнения системы (6.1.2)
(в противном случае, переставим уравнения системы (6.1.2)
чтобы это условие было выполнено). Для исключения неизвестного  последовательно умножим второе уравнение системы (6.1.2) на множетели
последовательно умножим второе уравнение системы (6.1.2) на множетели  и вычтем последовательно преобразованные уравнения из третьего, четвёртого, последнего. уравнения системы (6.1.2). В результате получим эквивалентную систему:
и вычтем последовательно преобразованные уравнения из третьего, четвёртого, последнего. уравнения системы (6.1.2). В результате получим эквивалентную систему:
в которой коэффициенты  вычислены по формулам:
вычислены по формулам:

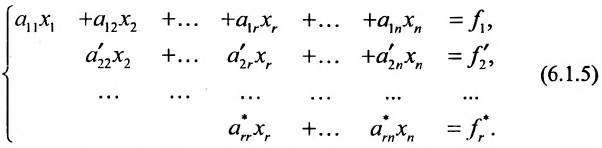
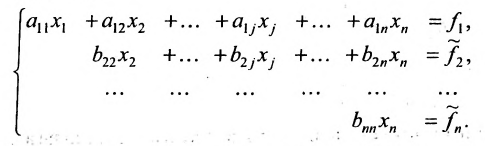
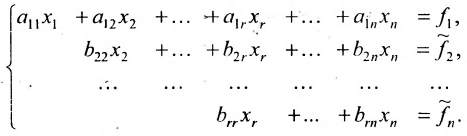
Продолжая аналогичные преобразования, систему (6.1.1) можно привести к одному из видов:
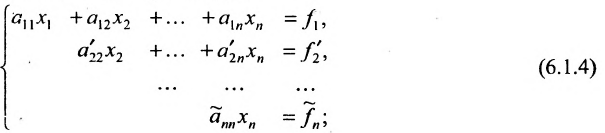
Совокупность элементарных преобразований, приводящих систему (6.1.1) к виду (6.1.4) или (6.1.5) называется прямым ходом метода Гаусса.
Отметим, что если на каком-то шаге прямого хода метода Гаусса получим уравнение вида:
 , то это означает, что система (6.1.1) несовместна.
, то это означает, что система (6.1.1) несовместна.
Итак, предположим, что в результате прямого хода метода Гаусса мы получили систему (6.1.4), которая называется системой треугольного вида. Тогда из последнего уравнения находим значение  подставляем найденное значение
подставляем найденное значение  в предпоследнее уравнение системы (6.1.4) и находим значение
в предпоследнее уравнение системы (6.1.4) и находим значение  ; и т.д. двигаясь снизу вверх в системе (6.1.4) находим единственные значения неизвестных
; и т.д. двигаясь снизу вверх в системе (6.1.4) находим единственные значения неизвестных  которые и определяют единственное решение системы (6.1.1). Построение решения системы (6.1.4) называют обратным ходом метода Гаусса.
которые и определяют единственное решение системы (6.1.1). Построение решения системы (6.1.4) называют обратным ходом метода Гаусса.
Если же в результате прямого хода метода Гаусса мы получим систему (6.1.5), которая называется системой ступенчатого вида, то из последнего уравнения этой системы находим значение неизвсстного  которое выражается через неизвестные
которое выражается через неизвестные  . Найденное выражение подставляем в предпоследнее уравнение системы (6.1.5) и выражаем неизвестное
. Найденное выражение подставляем в предпоследнее уравнение системы (6.1.5) и выражаем неизвестное  через неизвестные
через неизвестные  и т.д. Двигаясь снизу вверх в системе (6.1.5) находим выражения неизвестных
и т.д. Двигаясь снизу вверх в системе (6.1.5) находим выражения неизвестных  через неизвестные
через неизвестные  При этом неизвестные
При этом неизвестные  называются базисными неизвестными, а неизвестные
называются базисными неизвестными, а неизвестные  — свободными. Так как свободным неизвестным можно придавать любые значения и получать соответствующие значения базисных неизвестных, то система (6.1.5), а, следовательно, и система (6.1.1) в этом случае имеет бесконечное множество решений. Полученные выражения базисных неизвестных через свободные неизвестные называются общим решением системы уравнений (6.1.1).
— свободными. Так как свободным неизвестным можно придавать любые значения и получать соответствующие значения базисных неизвестных, то система (6.1.5), а, следовательно, и система (6.1.1) в этом случае имеет бесконечное множество решений. Полученные выражения базисных неизвестных через свободные неизвестные называются общим решением системы уравнений (6.1.1).
Таким образом, если система (6.1.1) путём элементарных преобразований приводится к треугольному виду (6.1.4), то она имеет единственное решение, если же она приводится к системе ступенчатого вида (6.1.5), то она имеет бесконечное множество решений. При этом неизвестные  , начинающие уравнения ступенчатой системы, называются базисными, а остальные неизвестные — свободными.
, начинающие уравнения ступенчатой системы, называются базисными, а остальные неизвестные — свободными.
Практически удобнее преобразовывать не саму систему уравнений (6.1.1), а расширенную матрицу системы, соединяя последовательно получающиеся матрицы знаком эквивалентности .
.
Формализовать метод Гаусса можно при помощи следующего алгоритма.
Алгоритм решения системы m линейных уравнений с n неизвестными методом Гаусса
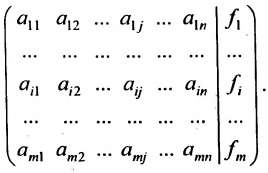
1. Составьте расширенную матрицу коэффициентов системы уравнений так, чтобы  было не равно нулю:
было не равно нулю:
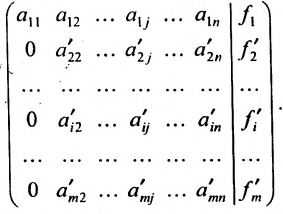
2. Выполните первый шаг метода Гаусса: в первом столбце начиная со второй строки, запишите нули, а все другие элементы вычислите по формуле

Матрица после первого шага примет вид
3. Выполните второй шаг метода Гаусса, предполагая, что  : во втором столбце начиная с третьей строки, запишите нули, а все другие элементы вычислите по формуле
: во втором столбце начиная с третьей строки, запишите нули, а все другие элементы вычислите по формуле

После второго шага матрица примет вид 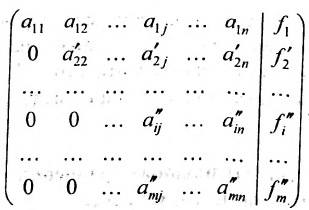
4. Продолжая аналогичные преобразования, придёте к одному из двух случаев:
а) либо в ходе преобразований получим уравнение вида 
тогда данная система несовместна;
б) либо придём к матрице вида:
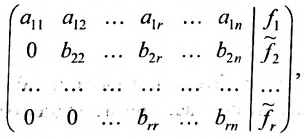
где  . Возможное уменьшение числа строк
. Возможное уменьшение числа строк 
связано с тем, что в процессе преобразований матрицы исключаются строки, состоящие из нулей.
5. Использовав конечную матрицу, составьте систему, при этом возможны два случая:
Система имеет единственное,решение  , которое находим из системы обратным ходом метода Гаусса. Из последнего уравнения находите
, которое находим из системы обратным ходом метода Гаусса. Из последнего уравнения находите  . Из предпоследнего уравнения находите
. Из предпоследнего уравнения находите  затем из третьего от конца —
затем из третьего от конца —  и т.д., двигаясь снизу вверх, найдём все неизвестные
и т.д., двигаясь снизу вверх, найдём все неизвестные  .
.
5.2.  :
:
Тогда r неизвестных будут базисными, а остальные (n-r) — свободными. Из последнего уравнения выражаете неизвестное  через
через  . Из предпоследнего уравнения находите
. Из предпоследнего уравнения находите  и т.д.
и т.д.
Система имеет в этом случае бесконечное множество решений.
Приведенный алгоритм можно несколько видоизменить и получить алгоритм полного исключения, состоящий в выполнении следующих шагов. На первом шаге:
- составляется расширенная матрица;
- выбирается разрешающий элемент расширенной матрицы (если , строки матрицы можно переставить так, чтобы выполнялось условие );
- элементы разрешающей строки (строки, содержащей разрешающий элемент) оставляем без изменения; элементы разрешающего столбца (столбца, содержащего разрешающий элемент), кроме разрешающего элемента, заменяем нулями;
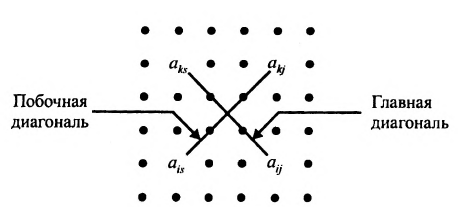
- все другие элементы вычисляем по правилу прямоугольника: преобразуемый элемент равен разности произведений элементов главной диагонали (главную диагональ образует разрешающий элемент и преобразуемый) и побочной диагонали (побочную диагональ образуют элементы, стоящие в разрешающей строке и разрешающем столбце): — разрешающий элемент (см. схему).
 (если
(если  , строки матрицы можно переставить так, чтобы выполнялось условие
, строки матрицы можно переставить так, чтобы выполнялось условие  );
); — разрешающий элемент (см. схему).
— разрешающий элемент (см. схему).Последующие шаги выполняем по правилам:
1) выбирается разрешающий элемент  (диагональный элемент матрицы);
(диагональный элемент матрицы);
2) элементы разрешающей строки оставляем без изменения;
3) все элементы разрешающего столбца, кроме разрешающего элемента, заменяем нулями; • •
4) все другие элементы матрицы пересчитываем по правилу прямоугольника.
На последнем шаге делим элементы строк на диагональные элементы матрицы, записанные слева от вертикальной черты, и получаем решение системы.
Пример:
Решить систему уравнений:
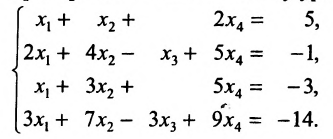
Решение:
Составим расширенную матрицу системы, и применим алгоритм полного исключения, обозначая разрешающий элемент символом 
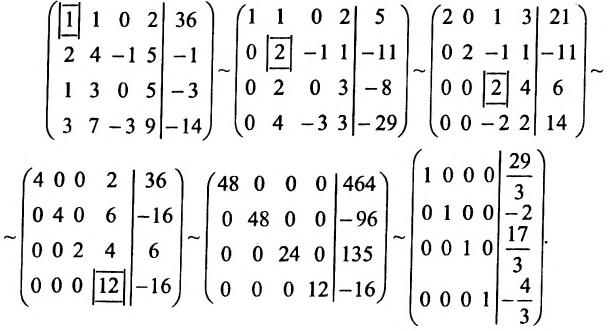
Из последней матрицы находим следующее решение системы
уравнении: 
Ответ: 
Пример:
Решить систему уравнений:
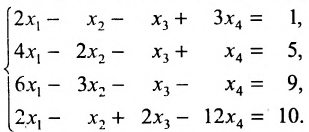
Решение:
Составим расширенную матрицу системы, и применим алгоритм полного исключения, обозначая разрешающий элемент символом 
Система привелась к ступенчатому виду (трапециевидной форме):

в которой неизвестные  — базисные, а
— базисные, а  — свободные. Из второго уравнения системы (6.1.6) находим выражение
— свободные. Из второго уравнения системы (6.1.6) находим выражение  через
через  . Из первого уравнений найдём выражение
. Из первого уравнений найдём выражение  через
через  и
и  . Система имеет бесконечное множество решений. Общее решение системы имеет вид:
. Система имеет бесконечное множество решений. Общее решение системы имеет вид:
в котором  принимают любые значения из множества действительных чисел.
принимают любые значения из множества действительных чисел.
Если в общем решении положить  , то получим решение
, то получим решение  , которое называется частным решением заданной системы.
, которое называется частным решением заданной системы.
Ответ: система имеет бесконечное множество решений, общее решение которой записывается в виде: 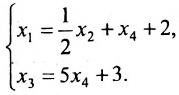
Пример:
Решить систему уравнений:
Решение:
Составим расширенную матрицу системы, и применим алгоритм полного исключения, обозначая разрешающий элемент символом 
 В последней матрице мы получили четвёртую строку, которая равносильна уравнению
В последней матрице мы получили четвёртую строку, которая равносильна уравнению  . Это означает, что заданная система не имеет решений.
. Это означает, что заданная система не имеет решений.
Ответ: система несовместна.
Замечание 1. Если дана система уравнений (6.1.1), в которой число уравнений m равно числу неизвестных n (m=n) и определитель этой системы  не равен нулю
не равен нулю  , то система имеет единственное решение, которое можно найти по формулам Крамера:
, то система имеет единственное решение, которое можно найти по формулам Крамера: 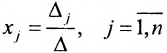 , где определитель
, где определитель  получен из определи-теля
получен из определи-теля  заменой j-ro столбца столбцом свободных членов.
заменой j-ro столбца столбцом свободных членов.
Если же такую систему (m-n) записать в матричной форме AX=F, то её решение можно найти по формуле  и оно является единственным.
и оно является единственным.
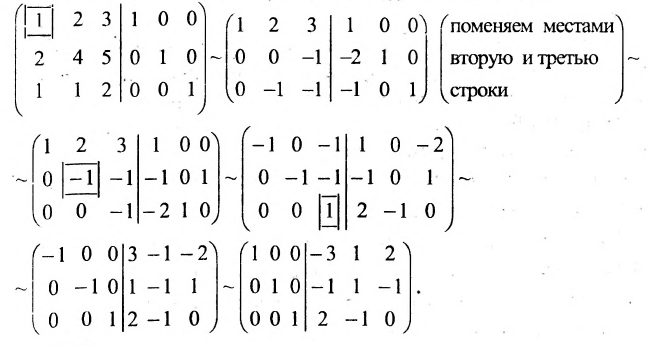
Замечание 2. Используя метод Гаусса, тем самым и алгоритм полного исключения, можно находить обратную матрицу. Для этого составляется расширенная матрица, в которой слева от вертикальной черты записана матрица А, а справа — единичная матрица. Реализовав алгоритм полного исключения, справа от вертикальной черты получаем обратную матрицу, а слева — единичную.
Пример:
Найти обратную матрицу для матрицы: 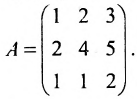
Решение:
то обратная матрица  существует. Составим расширенную мат-рицу и применим алгоритм полного исключения:
существует. Составим расширенную мат-рицу и применим алгоритм полного исключения:
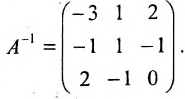
Покажем, что 
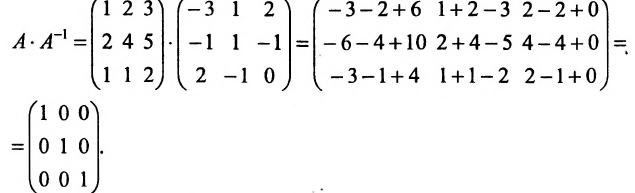
ответ 
Исследование совместности и определённости системы. Теорема Кронекера-Капелли
Рассмотрим систему (6.1.1) m линейных уравнений с n неизвестными при любых m и n (случай m=n не исключается). Вопрос о совместности системы решается следующим критерием.
Теорема 6.2.1. (критерий Кронкера-Капелли). Для того, чтобы система линейных уравнений(6.1.1) была совместна, необходимо и достаточно, чтобы ранг матрицы А системы был равен рангу расширенной матрицы  .
.
Доказательство и Необходимость:
Предположим, что система (6.1.1) совместна и  — какое-либо её решение (возможно единственное). По определению решения системы получаем:
— какое-либо её решение (возможно единственное). По определению решения системы получаем:
Из этих равенств следует, что последний столбец матрицы  есть линейная комбинация остальных ее столбцов с коэффициентами
есть линейная комбинация остальных ее столбцов с коэффициентами  , то есть система вектор-столбцов матрицы
, то есть система вектор-столбцов матрицы  линейно зависима (свойство 3 п.2.5) и значит последний столбец матрицы
линейно зависима (свойство 3 п.2.5) и значит последний столбец матрицы  не изменяет ранга матрицы А, т.е.
не изменяет ранга матрицы А, т.е.
 .
.
Достаточность. Пусть  . Рассмотрим r базисных
. Рассмотрим r базисных
столбцов матрицы А, которые одновременно будут базисными столбцами и матрицы  . В этом случае последний столбец матрицы
. В этом случае последний столбец матрицы  можно представить как линейную комбинацию базисных столбцов, а следовательно, и как линейную комбинацию всех столбцов матрицы А, то есть
можно представить как линейную комбинацию базисных столбцов, а следовательно, и как линейную комбинацию всех столбцов матрицы А, то есть
где  — коэффициенты линейных комбинаций. А это означает, что
— коэффициенты линейных комбинаций. А это означает, что  — решение системы (6.1.1), следовательно,
— решение системы (6.1.1), следовательно,
эта система совместна.
Совместная система линейных уравнений (6.1.1) может быть либо определенной, либо неопределенной.
Следующая теорема даст критерий определенности.
Теорема 6.2.2. Совместная система линейных уравнений имеет единственное решение тогда и только тогда, когда ранг матрицы А системы равен числу п ее неизвестных.
Таким образом, если число уравнений m системы (6.1.1) меньше числа ее неизвестных n и система совместна, то ранг матрицы системы  . Значит система неопределенная.
. Значит система неопределенная.
В случае  по теореме 6.2.2 получаем, что система имеет единственное решение. Так как
по теореме 6.2.2 получаем, что система имеет единственное решение. Так как  , то определитель
, то определитель  и квадратная матрица А имеет обратную x матрицу
и квадратная матрица А имеет обратную x матрицу  и её решение можно найти по формуле:
и её решение можно найти по формуле:  , где Х- столбец неизвестных, F— столбец свободных членов, или по формулам Крамера.
, где Х- столбец неизвестных, F— столбец свободных членов, или по формулам Крамера.
Следует отметить, что, решая систему (6.1.1) методом Гаусса, мы определяем и совместность, и определённость системы.
Пример:
Исследовать на совместность и определённость следующую систему линейных уравнений:
Решение:
Составим расширенную матрицу заданной системы. Определяя её ранг, находим тем самым и ранг матрицы системы. Для нахождения ранга матрицы применим алгоритм метода Гаусса. 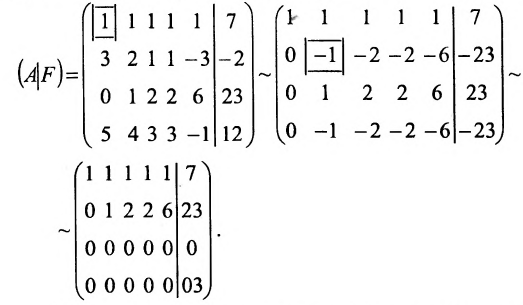
Из последней матрицы следует, что ранг расширенной матрицы  не может быть больше ранга матрицы А системы. Так как
не может быть больше ранга матрицы А системы. Так как
 , то заданная система совместная и неопределённая.
, то заданная система совместная и неопределённая.
Однородные системы линейных уравнений
Система линейных уравнений (6.1.1) называется однородной, если все свободные члены  равны нулю, то есть система имеет следующий вид:
равны нулю, то есть система имеет следующий вид:
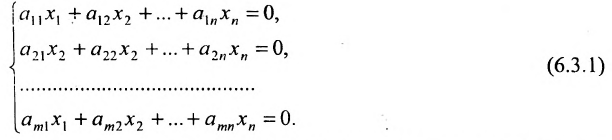
Эта система всегда совместна, так как очевидно, что она имеет нулевое решение

Для однородной системы важно установить, имеет ли она ненулевые решения. Этот факт устанавливается следующей теоремой.
Теорема 6.3.1. Для того, чтобы однородная система имела ненулевые решения, необходимо и достаточно, чтобы ранг г матрицы А системы был меньше числа неизвестных n (r n).
n).
Доказательство. Необходимость. Пусть система (6.3.1) имеет ненулевое решение. Тогда она неопределённая, т.к. имеет еще и нулевое решение. В силу теоремы 6.2.2 ранг матрицы неопределённой системы не может равняться n потому что при r(А)=n система определённая. Следовательно,  и так как он не может быль больше n то
и так как он не может быль больше n то  .
.
Достаточность. Если  , то в силу теоремы 6.2.2 система (6.3.1) имеет бесчисленное множество решений. А так как только одно решение является нулевым, то все остальные решения ненулевые.
, то в силу теоремы 6.2.2 система (6.3.1) имеет бесчисленное множество решений. А так как только одно решение является нулевым, то все остальные решения ненулевые. 
Следствие 1. Если число неизвестных в однородной системе больше числа уравнений, то однородная система имеет ненулевые решения.
Доказательство. Действительно, ранг матрицы системы (6.3.1) не может превышать m. Но так как по условию , то и
, то и  . Следовательно, в силу теоремы 6.3.1 система имеет ненулевые решения.
. Следовательно, в силу теоремы 6.3.1 система имеет ненулевые решения.
Следствие 2. Для того, чтобы однородная система с квадрат-ной матрицей имела ненулевые решения, необходимо и достаточно, чтобы её определитель  равнялся нулю.
равнялся нулю.
Доказательство. Рассмотрим однородную систему с квадратной матрицей:
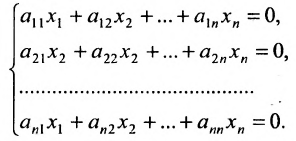 (6.3.2)
(6.3.2)
Если определитель матрицы системы  , то ранг матрицы
, то ранг матрицы  , тогда в силу теоремы 6.3.1 система (6.3.2) имеет ненулевое решение, так как условие
, тогда в силу теоремы 6.3.1 система (6.3.2) имеет ненулевое решение, так как условие  является необходимым и достаточным условием для существования ненулевого решения. Заметим, что если определитель матрицы системы (6.3.2) не равен нулю, то
является необходимым и достаточным условием для существования ненулевого решения. Заметим, что если определитель матрицы системы (6.3.2) не равен нулю, то  в силу теоремы 6.3.1 она имеет только нулевое решение.
в силу теоремы 6.3.1 она имеет только нулевое решение.
Пример:
Решить систему однородных линейных уравнений:
Решение:
Составим матицу системы и применим алгоритм полного исключения: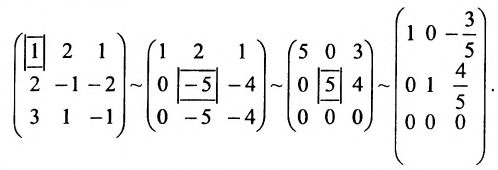
Из последней матрицы следует, что  и система имеет бесчисленное множество решений.
и система имеет бесчисленное множество решений.
Используя последнюю матрицу, последовательно находим общее решение: 
Неизвестные  — базисные,
— базисные,  — свободная неизвестная,
— свободная неизвестная,  .
.
Фундаментальная система решений. Общее решение неоднородной системы линейных уравнений
Рассмотрим систему однородных линейных уравнений
 (6.4.1)
(6.4.1)

системы m линейных однородных уравнений с n неизвестными можно рассматривать как вектор-строку  или как вектор-столбец
или как вектор-столбец  . Поэтому имеют смысл такие понятия, как сумма двух решений, произведение решения на число, линейная комбинация решений, линейная зависимость или независимость системы решений. Непосредственной подстановкой в систему (6.4.1) можно показать, что:
. Поэтому имеют смысл такие понятия, как сумма двух решений, произведение решения на число, линейная комбинация решений, линейная зависимость или независимость системы решений. Непосредственной подстановкой в систему (6.4.1) можно показать, что:
1) сумма двух решений также является решением системы, т.е.
если  — решения системы
— решения системы
(6.4.1), то и  — решение системы (6.4.1);
— решение системы (6.4.1);
2) произведение решений на любое число
на любое число  есть решение системы, т.е.
есть решение системы, т.е.  — решение системы.
— решение системы.
Из приведенных свойств следует, что
3) линейная комбинация решений системы (6.4.1) является решением этой системы.
В частности, если однородная система (6.4.1) имеет хотя бы одно ненулевое решение, то из него умножением на произвольные числа, можно получить бесконечное множество решений.
Определение 6.4.1. Фундаментальной системой решений для системы однородных линейных уравнений (6.4.1) называется линейно независимая система решений, через которую линейно выражается любое решение системы (6.4.1).
Заметим, что если ранг матрицы системы (6.4.1) равен числу неизвестных n (r(А)=n), то эта система не имеет фундаментальной системы решений, так как единственным решением будет нулевое решение, составляющее линейно зависимую систему. Существование и число фундаментальных решений определяется следующей теоремой.
Теорема 6.4.1. Если ранг матрицы однородной системы уравнений (6.4.1) меньше числа неизвестных (r(А) n), то система (6.4.1) имеет бесконечное множество фундаментальных систем решений, причём каждая из них состоит из n-r решений и любые n-r линейно независимые решения составляют фундаментальную систему.
n), то система (6.4.1) имеет бесконечное множество фундаментальных систем решений, причём каждая из них состоит из n-r решений и любые n-r линейно независимые решения составляют фундаментальную систему.
Сформулируем алгоритм построения фундаментальной системы решений:
- Выбираем любой определитель порядка n-r, отличный от нуля, в частности, определитель порядка n-r, у которого элементы главной диагонали равны единице, а остальные — нули.
- Свободным неизвестным придаём поочерёдно значения, равные элементам первой, второй и т.д. строк определителя, и каждый раз из общего решения находим соответствующие значения базисных неизвестных.
- Из полученных n-r решений составляют фундаментальную систему решений.
 порядка n-r, отличный от нуля, в частности, определитель порядка n-r, у которого элементы главной диагонали равны единице, а остальные — нули.
порядка n-r, отличный от нуля, в частности, определитель порядка n-r, у которого элементы главной диагонали равны единице, а остальные — нули. , и каждый раз из общего решения находим соответствующие значения базисных неизвестных.
, и каждый раз из общего решения находим соответствующие значения базисных неизвестных.Меняя произвольно определитель  , можно получать всевозможные фундаментальные системы решений.
, можно получать всевозможные фундаментальные системы решений.
Пример:
Найти общее решение и фундаментальную систему решений для однородной системы уравнений:
Решение:
Составим матрицу системы и применим алгоритм полного исключения.
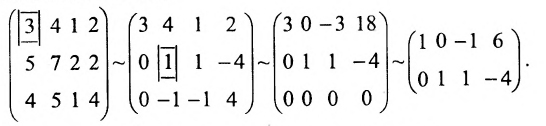
Для последней матрицы составляем систему:
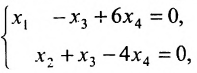 ,
,
, из которой находим общее решение:
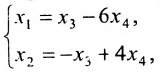
в котором  — базисные неизвестные, а
— базисные неизвестные, а  — свободные неизвестные.
— свободные неизвестные.
Построим фундаментальную систему решений. Для этого выбираем определитель  и свободным неизвестным придаём поочерёдно значения, равные элементам первой, а затем второй строк, т.е. положим вначале
и свободным неизвестным придаём поочерёдно значения, равные элементам первой, а затем второй строк, т.е. положим вначале  и получим из общего решения
и получим из общего решения  ; затем полагаем
; затем полагаем  , из общего решения находим:
, из общего решения находим:  .
.
Таким образом, построенные два решения (1; -1; 1; 0) и (-6; 4; 0; 1) составляют фундаментальную систему решений.
Если ранг матрицы системы однородных линейных уравнений (6.4.1) на единицу меньше числа неизвестных:  то
то  , и значит, фундаментальная система состоит из одного решения. Следовательно, любое ненулевое решение образует фундаментальную систему. В этом случае любые два решения различаются между собой лишь числовыми множителями.
, и значит, фундаментальная система состоит из одного решения. Следовательно, любое ненулевое решение образует фундаментальную систему. В этом случае любые два решения различаются между собой лишь числовыми множителями.
Рассмотрим теперь неоднородную систему m линейных уравнений с n неизвестными (6.1.1). Если в системе (6.1.1) положить  , то полученная однородная система называется приведенной для системы (6.1.1).
, то полученная однородная система называется приведенной для системы (6.1.1).
Решения системы (6.1.1) и её приведенной системы удовлетворяют свойствам:
- Сумма и разность любого решения системы (6.1.1) и любого решения её приведенной системы является решением неоднородной системы.
- Все решения неоднородной системы можно получить, прибавляя к одному (любому) её решению поочерёдно все решения её приведенной системы.
Из этих свойств следует теорема.
Теорема 6.4.2. Общее решение неоднородной системы (6.1.1.) определяется суммой любого частного решения этой системы и общего решения её приведенной системы.
Пример:
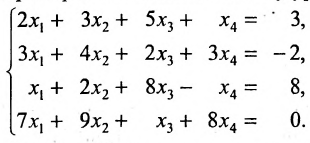
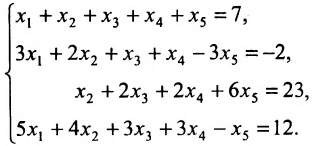
Найти общее решение системы:
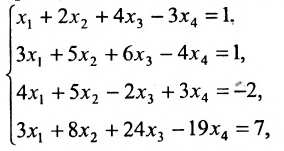
Решение:
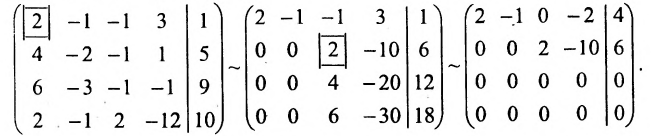
Составим расширенную матрицу (A|F) заданной системы и применим алгоритм полного исключения:
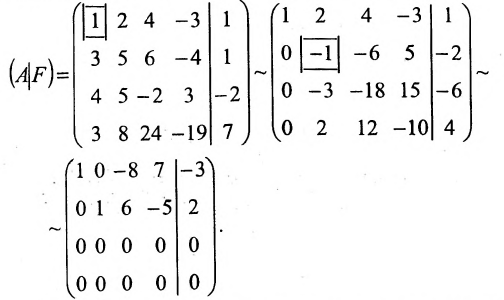 ,
,
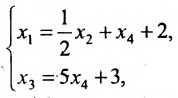
Преобразованной матрице соответствует система уравнений:
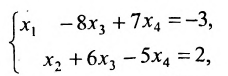
из которой находим общее решение системы:

, где  — базисные неизвестные, а
— базисные неизвестные, а  — свободные неизвестные.
— свободные неизвестные.
Покажем, что это общее решение определяется суммой любого частного решения заданной системы и общего решения приведенной системы.
Подставляя вместо свободных неизвестных  в общее решение системы нули, получаем частное решение исходной системы:
в общее решение системы нули, получаем частное решение исходной системы:  .
.
Очевидно, что общее решение приведенной системы имеет вид:

Суммируя частное решение заданной системы и общее решение приведенной системы, получим общее решение (6.4.2) исходной системы.
Отметим, что общее решение системы (6.1.1) можно представить в векторном виде:

где  — • некоторое решение (вектор-строка) системы (6.1.1);
— • некоторое решение (вектор-строка) системы (6.1.1);
 — фундаментальная система решений системы (6.4.1);
— фундаментальная система решений системы (6.4.1);
 — любые действительные числа.
— любые действительные числа.
Формула (6.4.4) называется общим решением системы (6.1.1) в векторной форме.
Запишем общее решение системы примера 6.4.1 в векторной форме. Для этого определим фундаментальную систему решений приведенной системы. Возьмём определитель  и придадим поочерёдно свободным неизвестным значения, равные элементам строк. Пусть
и придадим поочерёдно свободным неизвестным значения, равные элементам строк. Пусть  тогда из общего решения (6.4.3) приведенной системы находим
тогда из общего решения (6.4.3) приведенной системы находим  ; если же
; если же  , то
, то  . Следовательно, фундаментальную систему решений образуют решения:
. Следовательно, фундаментальную систему решений образуют решения:  и
и  . Тогда общее решение заданной системы в векторной форме имеет вид:
. Тогда общее решение заданной системы в векторной форме имеет вид:  , где
, где  — частное решение заданной системы;
— частное решение заданной системы;  .
.
Определение метода Гаусса
Исторически первым, наиболее распространенным методом решения систем линейных уравнений является метод Гаусса, или метод последовательного исключения неизвестных. Сущность этого метода состоит в том, что посредством последовательных исключений неизвестных данная система превращается в ступенчатую (в частности, треугольную) систему, равносильную данной. При практическом решении системы линейных уравнений методом Гаусса удобнее приводить к ступенчатому виду не саму систему уравнений, а расширенную матрицу этой системы, выполняя элементарные преобразования над ее строками. Последовательно получающиеся в ходе преобразования матрицы обычно соединяют знаком эквивалентности.
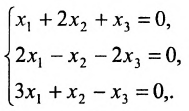
Пример:
Решить систему уравнений методом Гаусса:
Решение:
Выпишем расширенную матрицу данной системы 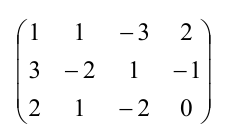 и произведем следующие элементарные преобразования над ее строками:
и произведем следующие элементарные преобразования над ее строками:
а) из ее второй и третьей строк вычтем первую, умноженную соответственно на 3 и 2: 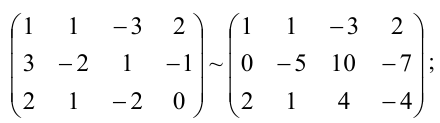
б) третью строку умножим на (-5) и прибавим к ней вторую: 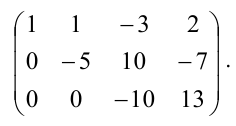
В результате всех этих преобразований данная система приводится к треугольному виду: 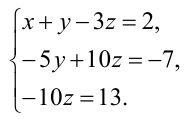
Из последнего уравнения находим  Подставляя это значение во второе уравнение, имеем
Подставляя это значение во второе уравнение, имеем  Далее из первого уравнения получим
Далее из первого уравнения получим 
Вычисление метода Гаусса
Этот метод основан на следующей теореме.
Теорема:
Элементарные преобразования не изменяют ранга матрицы.
К элементарным преобразованиям матрицы относят:
- перестановку двух параллельных рядов;
- умножение какого-нибудь ряда на число, отличное от нуля;
- прибавление к какому-либо ряду матрицы другого, параллельного ему ряда, умноженного на произвольное число.
Путем элементарных преобразований исходную матрицу можно привести к трапециевидной форме
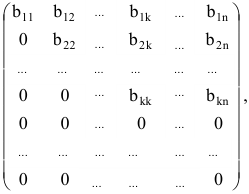
где все диагональные элементы  отличны от нуля. Тогда ранг полученной матрицы равен рангу исходной матрицы и равен k.
отличны от нуля. Тогда ранг полученной матрицы равен рангу исходной матрицы и равен k.
Пример:
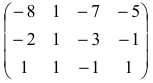
Найти ранг матрицы
1) методом окаймляющих миноров;
2 ) методом Гаусса.
Указать один из базисных миноров.
Решение:
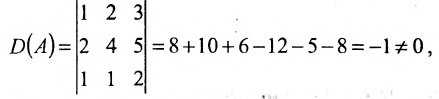
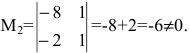
1. Найдем ранг матрицы методом окаймляющих миноров. Выберем минор второго порядка, отличный от нуля. Например,
 Существуют два минора третьего порядка, окаймляющих минор
Существуют два минора третьего порядка, окаймляющих минор 
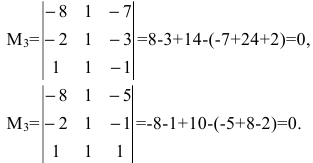 Т.к. миноры третьего порядка равны нулю, ранг матрицы равен двум. Базисным минором является, например, минор
Т.к. миноры третьего порядка равны нулю, ранг матрицы равен двум. Базисным минором является, например, минор 
2. Найдем ранг матрицы методом Гаусса. Производя последовательно элементарные преобразования, получим: 
- переставили первую и третью строки;
- первую строку умножили на 2 и прибавили ко второй, первую строку умножили на 8 и прибавили к третьей;
- вторую строку умножили на -3 и прибавили к третьей.
Последняя матрица имеет трапециевидную форму и ее ранг равен двум. Следовательно, ранг исходной матрицы также равен двум.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Прямая линия на плоскости и в пространстве
- Плоскость в трехмерном пространстве
- Функция одной переменной
- Производная функции одной переменной
- Дифференциальные уравнения с примерами
- Обратная матрица — определение и нахождение
- Ранг матрицы — определение и вычисление
- Определители второго и третьего порядков и их свойства
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.