Общая характеристика методов
Методы решения систем уравнений — прямые (точные) и итерационные (приближенные). Прямые применяются для решения систем линейных урав-нений, итерационные — для решения систем линейных и нелинейных уравне-ний.
Нелинейные уравнения установившегося режима формируются, если в узлах сети задана постоянная мощность(нагрузка или генерация).
Суть итерационных методов: задается некоторое начальное прибли-жение неизвестных U (0) , которое постепенно уточняется в ходе выполнения ряда однотипных шагов вычислений (итераций). Если итерационный про-цесс сходится, то получаем искомое решение U (*) с заданной точностью.
Итерациями называются многократно повторяющиеся однотипные ша-ги вычислений.
Основные характеристики итерационных методов:
1. Условия сходимости к решению, при которых происходит приближе-ние к искомому решению U (*) , либо удаление от него;
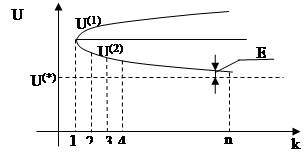
2. Скорость сходимости. Характеризуется количеством итераций n, необ-ходимых для достижения решения с заданной точностью, или законом изменения вектора погрешности при переходе от итерации к итерации;
2.3. 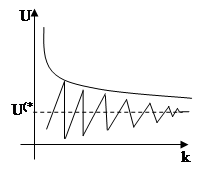 Характер сходимости. Сходимость – апе-риодическая или колебательная.
Характер сходимости. Сходимость – апе-риодическая или колебательная.
Возможно влияние на скорость сходимос-ти за счет введения дополнительных коэффици-ентов;
4. Необходимость хранения в памяти ЭВМ всех коэффициентов систем уравнений. Удобство программирования, простота алгоритмов и т.д.
Рассматриваем систему нелинейных уравнений установившегося режи-ма. В матричной форме она имеет вид:
 (1)
(1)
В развернутой форме такая система уравнений может быть представлена в следующем виде:
 (2)
(2)
Преобразуем систему (2) квиду, пригодному для решения ее итераци-онными методами. Для этого каждое уравнение системы решим относитель-но одной из неизвестных величин Ui:
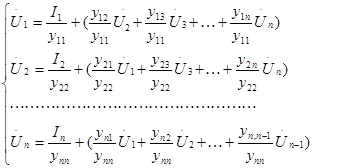 (3)
(3)
Любое i-ое уравнение этой системы можно записать в общем виде:
 (4)
(4)
Если задать начальные приближения неизвестных U (0) , подставить их в правую часть уравнений (4) и выполнить необходимые вычисления, опреде-лим следующее приближение неизвестных U (1) и т.д. Такая после-довательность действий соответствует методу простой итерации. Тогда (4) в итерационной форме:
 (4а)
(4а)
В матричной форме система (3) может быть записана следующим образом:

здесь  — вектор неизвестных напряжений;
— вектор неизвестных напряжений;
D — вектор свободных членов,  ;
;
С — матрица коэффициентов при неизвестных,  .
.
В итерационном виде система (5) принимает вид:
 . (6)
. (6)
Здесь к – номер приближения неизвестных.
Общий алгоритм итерационных методов решения СНАУ установившегося режима
1) Задание начальных приближений вектора неизвестных U (0) =Uном.
Как правило, в качестве начальных приближений напряжений задают номи-нальные напряжения узлов Uном.В некоторых случаях, в качестве начальных приближений напряжений принимают значения, полученные в предыдущих близких расчетах для данной схемы;
2) Задание точности расчета E, предельного количества итераций nпред.,
начального значения счетчика итераций к=0 и других параметров расчета;
3) Выполнение итерации в соответствии с формулой (6):
 ;
;
4) Контроль завершения итерационного процесса:
Если условие не выполняется, то изменяем счетчик итераций (к=к+1) и возвращаемся к пункту (3). Повторяем расчет при новых приближениях неизвестных.
Если условие выполняется для всех значений Ui, то итерационный процесс завершается, найденные на последней итерации приближения неизвестных U ( k +1) принимаются в качестве искомых значений с заданной точностью.
Итерационные методы дают последовательность приближенных значе-ний неизвестных, сходящуюся к точному решению. Это означает, что су-ществует предел последовательности:
 (7)
(7)
здесь U (* ) — точное решение при  .
.
Таким образом, точное решение может быть получено лишь в резуль-тате бесконечного итерационного процесса. Всякий вектор U ( k ) , полученный на к-ой итерации, является приближенным решением системы уравнений.
Вектор погрешности этого приближенного решения:
 (8)
(8)
Так как точное решение U (*) заранее неизвестно, то о погрешности судят по разности значений на смежных итерациях (к+1) и к, то есть по вектору поправок:
 (9)
(9)
Если  для всех і, то итерационный процесс завершается.
для всех і, то итерационный процесс завершается.
Такой подход к контролю завершения итерационного процесса — не единственный и не очень надежный, так как возможно такое незначительное изменение приближений от итерации к итерации даже вдали от решения.
Более строгим и надежным способом контроля завершения итераци-онных процессов является контроль невязок уравнений. Невязка уравнения – разность между левой и правой частями уравнения. Её значение получаем при подстановке в уравнения системы (2) очередного приближения неиз-вестных. Например, для 1-го уравнения:
 . (10)
. (10)
Для УУР невязка уравнения соответствует расчетному небалансу тока (мощ-ности) в узле. При подстановке точных значений неизвестных U1 (*) ,U2 (*) ,…,Un (*) невязки будут равны нулю:
 .
.
То есть если итерационный процесс сошелся, то невязки близки к нулю. И чем дальше приближение Ui ( k ) от точного решения, тем больше величина не-вязок. В общем случае вектор невязок можно определить:
 (11)
(11)
Итерационный процесс сошелся, если выполняются условия завершения итерационного процесса:
 (12)
(12)
Это условие является более надежным критерием окончания итерационного процесса.
Достаточным условием сходимости итерационного процесса для урав-нений установившегося режима является:

Т.о. условие сходимости определяется только соотношением элементов матрицы проводимостей Y . В ней диагональные элементы Уіі (собственные проводимости узлов) неравны нулю. Как правило, диагональные элементы матрицы проводимостей больше или равны суммы недиагональных элемен-тов. Т.е. при правильном формировании матрицы, это условие сходимости выполняется всегда.
Два вида сходимости итерационных процессов:
1. Экспоненциальный (апериодический):
 |
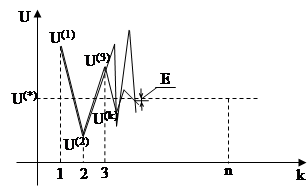 Итерационный процесс может быть так же несходящимся (приб-лижения не приближаются и не удаляются от решения), либо рас-ходящимся (значения приближе-ний удаляются от точного реше-ния).
Итерационный процесс может быть так же несходящимся (приб-лижения не приближаются и не удаляются от решения), либо рас-ходящимся (значения приближе-ний удаляются от точного реше-ния).
В случае не сходящихся или расходящихся итерационных процессов, нужно проверять правильность расчетов параметров схемы замещения, правильность расчета элементов и формирования матрицы проводимос-тей, анализировать величины токов и мощностей в заданных узлах.
Пример использования метода Ньютона для решения УУН
УЧЕТ КОМПЛЕКСНОГО ХАРАКТЕРА
ПАРАМЕТРОВ СХЕМЫ ЗАМЕЩЕНИЯ И РЕЖИМА[1]
Система уравнений узловых напряжений для цепи переменного тока:
 . . | (9.7) |
При решении на ЭВМ системы уравнений узловых напряжений для сети переменного тока, как правило, она приводится к системе действительных уравнений порядка  , где
, где  — число узлов схемы. Для этого представляют матрицы и вектор — столбцы с комплексными элементами в виде сумм матриц и вектор — столбцов с действительными элементами (при этом надо в виде такой суммы представить каждый комплексный элемент и учесть правило сложения матриц):
— число узлов схемы. Для этого представляют матрицы и вектор — столбцы с комплексными элементами в виде сумм матриц и вектор — столбцов с действительными элементами (при этом надо в виде такой суммы представить каждый комплексный элемент и учесть правило сложения матриц):
 | (9.8) |
Подставляя (9.8) в (9.7), получим:
 | (9.9) |
Уравнение (9.9) переписываем, разделяя действительные и мнимые слагаемые.
 . . | (9.10) |
 . . | (9.11) |
Иными словами, систему уравнений узловых напряжений для цепи переменного тока можно записать в виде блочного матричного уравнения:
 | (9.12) |
Выражение (9.12) является системой действительных уравнений порядка и содержит неизвестных действительных и мнимых составляющих узловых напряжений, представленных в форме действительных чисел.
ОПИСАНИЕ РАСЧЕТА УР С ПОМОЩЬЮ ВЕКТОР-ФУНКЦИИ
Нелинейные уравнения установившегося режима в общей форме можно записать в виде системы неявных функций:
 | (9.53) |
где  — вектор-функция.
— вектор-функция.
Эти уравнения связывают между собой параметры установившегося режима электрической системы. Часть параметров режима задана (независимые переменные  ). Обозначим вектор-столбец независимых переменных при расчете установившегося режима
). Обозначим вектор-столбец независимых переменных при расчете установившегося режима  . Остальные (зависимые переменные
. Остальные (зависимые переменные  ) могут быть найдены из уравнений установившегося режима. Обозначим вектор-столбец зависимых переменных
) могут быть найдены из уравнений установившегося режима. Обозначим вектор-столбец зависимых переменных  .
.
Число зависимых переменных  равно числу уравнений установившегося режима. Это означает, что вектор-функция и вектор-столбец имеют одинаковую размерность. В зависимости от постановки задачи и способов задания исходных данных в состав векторов независимых и зависимых переменных и могут входить разные параметры режима.
равно числу уравнений установившегося режима. Это означает, что вектор-функция и вектор-столбец имеют одинаковую размерность. В зависимости от постановки задачи и способов задания исходных данных в состав векторов независимых и зависимых переменных и могут входить разные параметры режима.
Разделение параметров режима на зависимые и независимые переменные играет важную роль при оптимизации режимов, при определении предельных по статической апериодической устойчивости режимов и при исследовании существования и единственности решения уравнений установившегося режима.
При расчетах установившегося режима вектор независимых переменных задан, то есть  , следовательно, нелинейную систему уравнений (9.53) можно переписать как
, следовательно, нелинейную систему уравнений (9.53) можно переписать как
 | (9.54) |
Число уравнений в этой системе также равно числу зависимых переменных , то есть равно размерности вектора . В результате решения уравнений УР можно найти все зависимые переменные .
МЕТОД НЬЮТОНА
Метод Ньютона для решения систем нелинейных уравнений представляет собой обобщение на многомерный случай метода касательных, применяемого для решения одного нелинейного уравнения.
Идея метода Ньютона состоит в последовательной замене на каждой итерации системы нелинейных уравнений некоторой линейной системой, решение которой дает значения неизвестных, более близкие к решению нелинейной системы, чем исходное приближение. Поясним идею этого метода на примере решения уравнения
 | (5.4) |
Решение уравнения  — точка, в которой кривая — точка, в которой кривая  проходит через нуль (рисунок 5.1): Рисунок 5.1- Графическая иллюстрация метода Ньютона проходит через нуль (рисунок 5.1): Рисунок 5.1- Графическая иллюстрация метода Ньютона |  |
Зададим начальное приближение к решению уравнения  и вычислим значение функции
и вычислим значение функции  . Если точка
. Если точка  достаточно близка к решению, то для его получения целесообразно разложить функцию
достаточно близка к решению, то для его получения целесообразно разложить функцию  в ряд Тейлора в окрестностях точки :
в ряд Тейлора в окрестностях точки :
 | (5.5) |
Выражению (5.5) соответствует касательная к функции, проведенная в точке . Такая касательная показана на рисунке 5.1. Для малых значений  приближение (5.5) хорошо моделирует саму функцию , поэтому в качестве приближенного решения исходного уравнения целесообразно использовать решение
приближение (5.5) хорошо моделирует саму функцию , поэтому в качестве приближенного решения исходного уравнения целесообразно использовать решение  линеаризованного уравнения (5.5), равное
линеаризованного уравнения (5.5), равное
 | (5.6) |
Полученную точку  можно использовать в качестве нового приближения и сделать шаг, в результате которого будет найдено приближение
можно использовать в качестве нового приближения и сделать шаг, в результате которого будет найдено приближение  и т. д. Итерационный процесс получения решения показан на рисунке 5.1.
и т. д. Итерационный процесс получения решения показан на рисунке 5.1.
Аналогично определяется решение для системы нелинейных уравнений. Рекуррентное выражение, представленное в матричной форме записи, имеет вид:
 | (5.7) |
где  — матрица Якоби (или якобиан), составленная из частных производных;
— матрица Якоби (или якобиан), составленная из частных производных;
 — вектор невязок, вычисленный в точке
— вектор невязок, вычисленный в точке  ;
;
 — вектор поправок к
— вектор поправок к  приближению .
приближению .
Пример использования метода Ньютона для решения УУН
Для электрической сети, представленной на рисунке 5.2, определить напряжения в узлах, используя метод Ньютона (три итерации).
Для рассматриваемой схемы электрической сети может быть записана система нелинейных УУН в форме баланса токов:
 | (5.8) |
 | |
| Рисунок 5.2 | Схема электрической сети. |
Для решения методом Ньютона система УУН (5.8) представляется в форме баланса мощностей
 | (5.9) |
И приводится к виду
 |
Рекуррентное выражение метода Ньютона:
 , , | (5.10) |
Где: 1) элементы матрицы Якоби вычисляются по формулам:
 , , |
2) вектор невязок вычисляется в точке  по следующим выражениям:
по следующим выражениям:
 , , |
3)  — вектор поправок к
— вектор поправок к  -му приближению
-му приближению  .
.
Новые напряжения вычисляются по выражению
 | (5.11) |
Для схемы электрической сети, представленной на рисунке 5.2, исходная система (5.9) имеет вид:
 |
Начальное приближение:  кВ
кВ
Вектор невязок записывается: 
Элементы матрицы Якоби:
 |
Для заданного начального приближения кВ элементы матрицы Якоби приобретают значение
 |
Подставляем все найденные величины в  и получаем систему двух линейных уравнений:
и получаем систему двух линейных уравнений:
 |
Решив ее, находим:
 |
По выражению (5.11):
 кВ кВ |
 |
 |
Система двух линейных уравнений:
 |
Решив ее, находим:
 |
По выражению (5.11):
 кВ кВ |
 |
 |
Система двух линейных уравнений:
 |
Решив ее, находим:
 |
По выражению (5.11):
 кВ кВ |
Вектор невязок для 4-ой итерации составил бы:
Уравнения узловых напряжений
Уравнения узловых напряжений (УУН) — система нелинейных (иногда линейных) алгебраических уравнений, в которых неизвестными являются напряжения в узлах электрической сети, наиболее часто применяемая для расчёта установившегося режима электрической сети.
Содержание
Описание
Установившийся режим электрических систем можно рассчитывать при различных способах задания исходных данных в зависимости от физической сути и цели расчёта. В статье рассмотрен наиболее часто встречающийся и наиболее простой случай, когда известны сопротивления и проводимости всех пассивных элементов электрической сети. Кроме того, заданы постоянные величины всех значений токов (мощности) во всех узлах, кроме балансирующего и все ЭДС, а также напряжение одного узла — базисного. При этом необходимо определить напряжения всех [math](n-1)[/math] узлов и токи во всех m ветвях.
В общем случае базисный по напряжению и балансирующий узлы могут не совпадать. Как правило, при расчётах режимов электрических систем предполагают, что эти узлы совпадают, в дальнейшем для простоты изложения предполагается, что базисным по напряжению и балансирующим является один и тот же [math]n[/math] -й узел. Число независимых уравнений по первому закону Кирхгофа равно числу независимых узлов [math](n-1)[/math] . Уравнение первого закона Кирхгофа для [math]n[/math] -го узла является следствием уравнений для остальных [math](n-1)[/math] узлов и не входит в число независимых уравнений.
Если в качестве неизвестных принять [math](n-1)[/math] узловых напря¬жений, то установившийся режим можно описать только узловыми уравнениями, вытекающими из первого закона Кирхгофа и закона Ома [1] , [2] , [3] , [4] . Уравнения узловых напряжений следуют из первого закона Кирхгофа, если все токи в ветвях выразить через узловые напряжения и проводимости ветвей. Число уравнений узловых напряжений равно числу независимых узлов [math](n-1)[/math] .
Уравнения баланса токов представляют собой простейшую форму уравнений, описывающих установившиеся режимы. Существуют две математические модели уравнений узловых напряжений:
Отличительной особенностью этих моделей является то, что линейная модель предполагает задание комплексных значений токов, в отличие от нелинейной модели, которая предполагает задание активной и реактивной мощностей. В большинстве задач нагрузки в узлах задаются активной и реактивной мощностями, по этой причине обычно используется нелинейная модель.
Вывод уравнений узловых напряжений
Для формирования УУН рассмотрим представленную на рис. 1 часть схемы замещения:
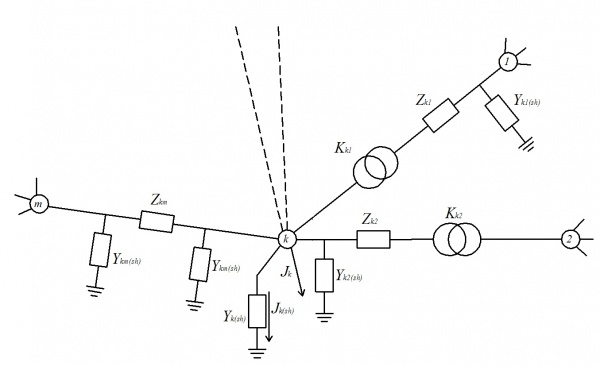
Первый закон Кирхгофа для к-го узла:
Наличие знака сопряжения в этом выражении обусловлено тем, что для идеального двухобмоточного трансформатора выполняется закон сохранения мощности [math]dot=dot=hatdot=hatdot[/math] , где индексами «Н» и «В» обозначены соответственно низшая и высшая обмотки трансформатора, поэтому, если [math]dot=dotdot<K_>[/math] , то из закона сохранения следует:
Подстановка полученных выражений в уравнение (1.1) с приведением подобных членов позволяет получить уравнение для k-го узла в виде:
В прямоугольной системе координат
В данной системе комплексные величины [math]displaystyle underline_, dot<U_>, dot<J_>[/math] представляются в виде
для проводимости справедливо следующее:
получаем, что [math]displaystyle underline=g-jb,[/math]
но для удобства расчёта матрицы проводимостей будем использовать соотношение
Запишем УУН для линейной ЭЭС:
левая часть данной системы характеризует токи, втекающие в k-й узел, правая часть — токи, вытекающие из того же узла, но с учетом влияния токов базы.
Подставляем (1), (2), (3) в (4), [math]dot_б[/math] представим аналогично уравнению (1), тогда имеем следующее:
[math]displaystyle begin sum_^ left( g_ + j b_ right) left( U_’ + j U_» right) = J_‘ + j J_»- left( g_ + j b_ right) left(U_’ + j U_»right), i = 1 ldots N end.[/math]
Сгруппируем и приведем подобные:
Сгруппируем относительно [math]j[/math] левую и правую части системы (5). Два комплексных числа равны, если равны их действительные и мнимые составляющие. Распишем в новой системе отдельно действительные и мнимые части. Получаем:
Представим данную систему (6) в матричной форме:
В случае, если [math]dot_б=U_б+j0,[/math] система (6) преобразуется к виду:
Соответственно упрощается матричная форма записи системы (8):
Вернемся к нелинейной модели ЭЭС. Для этого перенесем составляющую токов базы системы (4) в левую часть, изменив при этом диапазон [math]i=1 ldots (N-1)[/math] . Получаем:
Добавим, что [math]dot = P + j Q.[/math] (12)
Подставляем (11) в выражение (10), получаем следующее:
Подставляем (1), (3), (12) в (13), получаем:
[math]displaystyle begin sum_^ left( g_ + j b_ right) left( U_’ + j U_» right) = frac
, i = 1 ldots (N-1)end.[/math]
Раскрываем скобки, домножаем правую часть на сопряженное и группируем относительно [math]j[/math] :
Вынесем [math]j[/math] за знак суммы в левой части, а в правой части разобьем дробное выражение на две составляющие относительно [math]j[/math] , получим:
Преобразуем систему (14) к виду, аналогичному системе (8), и получаем нелинейную систему УУН для сети переменного тока в прямоугольных координатах в форме баланса токов:
Выведем систему нелинейных УУН для сети переменного тока в прямоугольных координатах в форме баланса мощностей. Для этого домножим систему (13) на [math]hat[/math] , получаем:
[math]displaystyle beginleft(U_i’-jU_i»right)sum_^left(g_+jb_right)left(U_’+jU_»right)=P_i-jQ_iend, i=1 ldots (N-1).[/math]
Вносим сопряженный комплекс напряжения под знак суммы и группируем относительно [math]j[/math] , имеем:
Преобразуем систему (17) к виду, аналогичному системе (15), и получаем нелинейную систему УУН для сети переменного тока в прямоугольных координатах в форме баланса мощностей:
В полярной системе координат
Комплексное число можно представить в алгебраической, показательной и тригонометрической формах:
[math]displaystyle dot=U_k’+jU_k» = V_k cdot e^ = V_k big(cos(δ_k)+j sin(δ_k)big).[/math]
Для того, чтобы вывести УУН в форме баланса мощностей в полярной системе координат, необходимо в систему (16) подставить показательную запись комплексного числа [math]dot[/math] . Выполнив это, получим:
[math]displaystyle begin V_i e^ sum_ limits^ (g_ + j b_) cdot V_k cdot e^ = P_i — j Q_i end, i= overline.[/math]
Переносим экспоненты в одну сторону:
[math]displaystyle begin V_isum_limits^V_k(g_+jb_) cdot e^ cdot e^=P_i-jQ_iend, i= overline.[/math]
Используя свойство степеней, выполним преобразования:
[math]displaystyle begin V_isum_limits^ V_k (g_+jb_) cdot e^ = P_i — jQ_iend, i= overline.[/math]
Переходим к тригонометрической форме:
[math]displaystyle begin V_isum_limits^ V_k bigg( big(g_ + jb_ big) big( cos(δ_k-δ_i) + j cdot sin(δ_k-δ_i) big) bigg) = P_i-jQ_i end, i= overline.[/math]
Группируем относительно [math]j[/math] :
Преобразуем систему (19) к виду, аналогичному системе (15), и получаем нелинейную систему УУН для сети переменного тока в полярных координатах в форме баланса мощностей:
Методы решения
Основные методы решения системы уравнений узловых напряжений:
- Метод Гаусса-Зейделя — это один из самых первых разработанных методов. Обычно показывает более медленную сходимость по сравнению с другими итерационными методами. Основными особенности — это малое использование памяти и не требуется матричная алгебра.
- Метод Якоби.
- Метод Z-матриц.
- Метод Ньютона-Рафсона — один из самых популярных методов решения, основанный на разложении в ряд Тейлора.
- Метод голоморфного встраивания — прямой метод расчёта на основе комплексного анализа.