Содержание:
- Методы решения систем линейных алгебраических уравнений (СЛАУ)
- Метод Крамера
- Матричный способ решения СЛАУ
- Метод Гаусса
- Ранг матрицы. Теорема Кронекера-Капелли
- Следствия из теоремы Кронекера — Капелли
- Основы математического моделирования систем и процессов (стр. 2 )
- 2.2.1. Прямые методы
- 3.3.1.3. Уточнение корней
- Решение систем линейных алгебраических уравнений, методы решения, примеры.
- Определения, понятия, обозначения.
- Решение элементарных систем линейных алгебраических уравнений.
- Решение систем линейных уравнений методом Крамера.
- Решение систем линейных алгебраических уравнений матричным методом (с помощью обратной матрицы).
- Решение систем линейных уравнений методом Гаусса.
- Решение систем линейных алгебраических уравнений общего вида.
- Теорема Кронекера – Капелли.
- Метод Гаусса для решения систем линейных алгебраических уравнений общего вида.
- Запись общего решения однородных и неоднородных систем линейных алгебраических с помощью векторов фундаментальной системы решений.
- Решение систем уравнений, сводящихся к СЛАУ.
Методы решения систем линейных алгебраических уравнений (СЛАУ)
Метод Крамера
Определение: Системой линейных алгебраических уравнений (СЛАУ) называется выражение 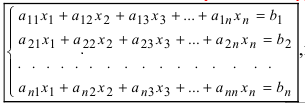
Определение: Определитель, составленный из коэффициентов при неизвестных, называется главным определителем системы 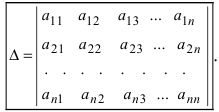
Крамер предложил следующий метод решения СЛАУ: умножим главный определитель на  для этого умножим все элементы первого столбца на эту неизвестную:
для этого умножим все элементы первого столбца на эту неизвестную: 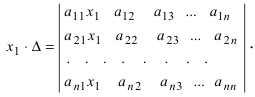
Второй столбец умножим на  третий столбец — на
третий столбец — на  -ый столбец — на
-ый столбец — на  и все эти произведения прибавим к первому столбцу, при этом произведение
и все эти произведения прибавим к первому столбцу, при этом произведение  не изменится:
не изменится:
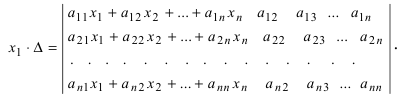
Согласно записи СЛАУ первый столбец получившегося определителя представляет собой столбец свободных коэффициентов, т.е. 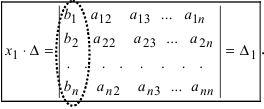
Определение: Определитель  называется первым вспомогательным определителем СЛАУ.
называется первым вспомогательным определителем СЛАУ.
Поступая аналогично тому, как описано выше, найдем все вспомогательные определители СЛАУ: 
31. Для того чтобы найти вспомогательный определитель i, надо в главном определителе СЛАУ заменить столбец i на столбец свободных коэффициентов.
Определение: Полученные выше соотношения называются формулами Крамера. Используя формулы Крамера, находят неизвестные величины  Проанализируем полученные формулы:
Проанализируем полученные формулы:
- если главный определитель системы отличен от нуля (
 ), то система имеет единственное решение;
), то система имеет единственное решение; - если главный определитель системы равен нулю (), а хотя бы один из вспомогательных определителей отличен от нуля ( или , или, . или ), то система не имеет решений (деление на нуль запрещено);
- если все определители системы равны нулю (), то система имеет бесчисленное множество решений.
 ), то система имеет единственное решение;
), то система имеет единственное решение; ), а хотя бы один из вспомогательных определителей отличен от нуля (
), а хотя бы один из вспомогательных определителей отличен от нуля (  или
или  , или, . или
, или, . или  ), то система не имеет решений (деление на нуль запрещено);
), то система не имеет решений (деление на нуль запрещено); ), то система имеет бесчисленное множество решений.
), то система имеет бесчисленное множество решений.Пример:
Решить СЛАУ методом Крамера 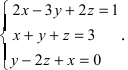
Решение:
Прежде всего, обращаем внимание на то, что в последнем уравнении переменные записаны в неправильном порядке, в этом случае говорят, что СЛАУ записана в ненормализованном виде. Нормализуем СЛАУ, для чего запишем неизвестные в последнем уравнении системы в правильном порядке, чтобы одноименные неизвестные были записаны друг под другом
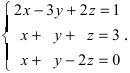
Найдем главный определитель СЛАУ (раскрываем по первой строке) 
Так как главный определитель системы отличен от нуля, то СЛАУ имеет единственное решение. Найдем три вспомогательных определителя 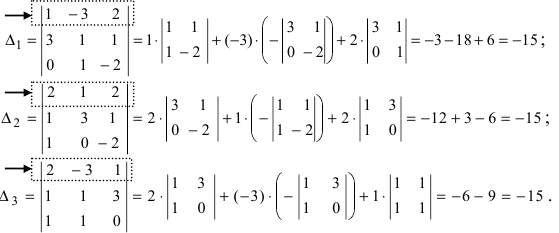
Воспользуемся формулами Крамера

Замечание: После нахождения решения СЛАУ надо обязательно провести проверку, для чего найденные числовые значения неизвестных подставляется в нормализованную систему линейных алгебраических уравнений.
Выполним проверку  Отсюда видно, что СЛАУ решена верно.
Отсюда видно, что СЛАУ решена верно.
Матричный способ решения СЛАУ
Для решения СЛАУ матричным способом введем в рассмотрение матрицу, составленную из коэффициентов при неизвестных  матpицы-столбцы неизвестных
матpицы-столбцы неизвестных  и свободных коэффициентов
и свободных коэффициентов 
Тогда СЛАУ можно записать в матричном виде  Матричный способ решения СЛАУ состоит в следующем: умножим слева матричное уравнение на обратную матрицу
Матричный способ решения СЛАУ состоит в следующем: умножим слева матричное уравнение на обратную матрицу  к матрице А, получим
к матрице А, получим  в силу того, что произведение
в силу того, что произведение  найдем
найдем  Таким образом, для нахождения неизвестных матричным способом, надо найти обратную к А матрицу
Таким образом, для нахождения неизвестных матричным способом, надо найти обратную к А матрицу  после чего надо умножить эту матрицу на матрицу-столбец свободных коэффициентов.
после чего надо умножить эту матрицу на матрицу-столбец свободных коэффициентов.
Пример:
Решить СЛАУ матричным способом 
Решение:
Введем в рассмотрение следующие матрицы 
Найдем матрицу  (см. Лекцию № 2): найдем детерминант матрицы А.
(см. Лекцию № 2): найдем детерминант матрицы А.
Пример:

Решение:
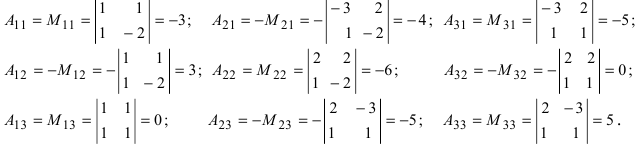
Найдем алгебраические дополнения всех элементов 
 Запишем обратную матрицу
Запишем обратную матрицу 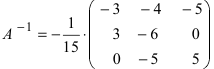 (в правильности нахождения обратной матрицы убедиться самостоятельно). Подействуем пай денной матрицей на матрицу-столбец свободных коэффициентов В:
(в правильности нахождения обратной матрицы убедиться самостоятельно). Подействуем пай денной матрицей на матрицу-столбец свободных коэффициентов В:
Отсюда находим, что х = 1; y = l; z = l.
Метод Гаусса
Метод Гаусса или метод исключения неизвестных состоит в том, чтобы за счет элементарных преобразований привести СЛАУ к треугольному виду. Покажем использование расширенной матрицы, составленной из коэффициентов при неизвестных и расширенной за счет столбца свободных коэффициентов, для приведения СЛАУ к треугольному виду на примере системы, рассматриваемой в этой лекции. Расширенная матрица для СЛАУ имеет вид: 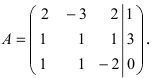
Замечание: В методе Гаусса желательно, чтобы первая строка расширенной матрицы начиналась с единицы.
Обменяем в расширенной матрице первую и вторую строки местами, получим 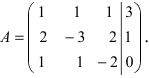 Приведем матрицу к треугольному виду, выполнив следующие преобразования: умножим элементы первой строки на (-2) и прибавим к соответствующим элементам второй строки
Приведем матрицу к треугольному виду, выполнив следующие преобразования: умножим элементы первой строки на (-2) и прибавим к соответствующим элементам второй строки 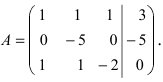 Разделим все элементы второй строки на (-5), получим эквивалентную матрицу
Разделим все элементы второй строки на (-5), получим эквивалентную матрицу 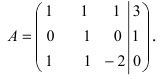
Умножим элементы первой строки на (—1) и прибавим к соответствующим элементам третьей строки 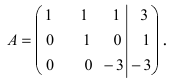 Разделим все элементы третьей строки на (-3), получим
Разделим все элементы третьей строки на (-3), получим  Таким образом, эквивалентная СЛАУ имеет вид (напомним, что первый столбец это коэффициенты при неизвестной х, второй — при неизвестной у, третий — при неизвестной z, а за вертикальной чертой находится столбец свободных коэффициентов):
Таким образом, эквивалентная СЛАУ имеет вид (напомним, что первый столбец это коэффициенты при неизвестной х, второй — при неизвестной у, третий — при неизвестной z, а за вертикальной чертой находится столбец свободных коэффициентов):
Из первого уравнения находим, что х = 1.
Вывод: Из вышеизложенного материала следует, что вне зависимости от
способа решения СЛАУ всегда должен получаться один и тот же ответ.
Замечание: После нахождения решения СЛАУ надо обязательно выполнить проверку, то есть подставить полученные значения неизвестных в заданную СЛАУ и убедиться в тождественности левой части всех равенств системы соответствующим правым частям. Отметим, что задание СЛАУ всегда верно, то есть, если проверка показывает нарушение оговоренной тождественности, то надо искать ошибку в проведенных вычислениях.
Ранг матрицы. Теорема Кронекера-Капелли
Определение: Рангом матрицы  называется наивысший порядок отличного от нуля минора этой матрицы.
называется наивысший порядок отличного от нуля минора этой матрицы.
Если  то среди всевозможных миноров этой матрицы есть хотя бы один минор порядка r, который отличен от нулю, а все миноры порядков больших, чем r, равны нулю.
то среди всевозможных миноров этой матрицы есть хотя бы один минор порядка r, который отличен от нулю, а все миноры порядков больших, чем r, равны нулю.
При вычислении ранга необходимо начинать вычислять миноры 2 порядка, затем миноры 3 порядка и так далее, пока не будут найдены миноры, обращающиеся в нуль. Если все миноры порядка p равны нулю, то и все миноры, порядок которых больше p, равны нулю.
Пример:
Найти ранг матрицы 
Решение:
Очевидно, что среди миноров второго порядка есть миноры отличные от нуля, например,  среди миноров третьего порядка также есть миноры, которые не равны нулю, например,
среди миноров третьего порядка также есть миноры, которые не равны нулю, например, 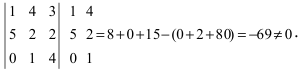 Очевидно, что определитель четвертого порядка равен нулю, так как он будет содержать строку, состоящую из одних нулей (см. свойство
Очевидно, что определитель четвертого порядка равен нулю, так как он будет содержать строку, состоящую из одних нулей (см. свойство  для определителей). Следовательно, ранг матрицы А равен 3.
для определителей). Следовательно, ранг матрицы А равен 3.
Теорема Кронекера-Капелли (критерий совместности СЛАУ). Для совместности системы линейных алгебраических уравнений (СЛАУ) необходимо и достаточно, чтобы ранг расширенной матрицы совпадал с рангом основной матрицы, составленной из коэффициентов при неизвестных величинах.
Следствия из теоремы Кронекера — Капелли
Следствие: Если ранг матрицы совместной системы равен числу неизвестных, то система имеет единственное решение (то есть она определенная).
Следствие: Если ранг матрицы совместной системы меньше числа неизвестных, то система имеет бесчисленное множество решений (т.е. она неопределенная).
В случае неопределенной системы решения ищут следующим образом: выбираются главные неизвестные, число которых равно рангу, а остальные неизвестные считаются свободными; далее главные неизвестные выражаются через свободные и получают множество решений, зависящих от свободных неизвестных. Это множество решений называется общим решением системы. Придавая свободным неизвестным различные произвольные значения, получим бесчисленное множество решений, каждое из которых называется частным решением системы.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Скалярное произведение и его свойства
- Векторное и смешанное произведения векторов
- Преобразования декартовой системы координат
- Бесконечно малые и бесконечно большие функции
- Критерий совместности Кронекера-Капелли
- Формулы Крамера
- Матричный метод
- Экстремум функции
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Telegram и логотип telegram являются товарными знаками корпорации Telegram FZ-LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Основы математического моделирования систем и процессов (стр. 2 )
 | Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 |

В каждом из перечисленных случаев в различной степени сказывается влияние таких ранее не учтенных факторов, как сила сопротивления воздуха, притяжение Луны, Солнца, убывание плотности атмосферы с высотой, вращение Земли, ветер, по-разному дующий на разных высотах, фактическое отличие формы Земли от шара (она является телом более сложной геометрической формы).
Проблема 3. Определение уровня детализации исследуемого объекта.
Любая физическая система представляет собой совокупность элементов. Каждый элемент в свою очередь можно расчленить на подэлементы. Процесс расчленения теоретически может быть бесконечным. Задача исследователя – выбрать оптимальный уровень детализации моделируемого объекта. Уровень детализации определяется целью моделирования и степенью знаний о свойствах элементов объекта.
Детализацию целесообразно производить до такого уровня, на котором для каждого элемента можно определить зависимость параметров выходных сигналов от параметров входных сигналов. Стремление повысить уровень детализации приводит к чрезмерной громоздкости модели и резкому увеличению ее размерности.
3-й этап. Формирование математической модели, т. е. запись модели в формализованном виде:
– все соотношения записывают в аналитической форме;
– логические условия выражают в виде систем неравенств;
4-й этап. Исследование математической модели. Инструментами исследования являются численные и аналитические методы.
5-й этап. Анализ результатов моделирования с последующим выводом об адекватности модели либо о необходимости ее доработки, либо о ее непригодности.
1.3.4. Классификация математических моделей
Математические модели можно классифицировать по форме их представления (рис. 1.10). За основу второй классификации (рис. 1.11) взят характер модели.

 |
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ В ФОРМЕ
СИСТЕМ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
2.1. Области применения
Исследование некоторых физических систем приводит к математическим моделям в форме систем линейных алгебраических уравнений (СЛАУ). Иногда СЛАУ появляются в процессе математического моделирования как промежуточный шаг (этап) в решении более сложной задачи. Есть значительное число научно-технических задач, в которых математические модели сложных нелинейных систем посредством дискретизации или линеаризации сводятся к решению СЛАУ.
Примеры задач, использующих математические модели в форме СЛАУ:
1) при проектировании и эксплуатации электротехнических устройств требуется проведение расчета и анализа их работы в стационарных режимах. Задача сводится к расчету эквивалентных схем, в основе которого лежит формирование и решение СЛАУ;
2) при построении математической модели, связывающей функциональной зависимостью некоторые параметры x, y исследуемого объекта на основании полученных в результате эксперимента данных  , где i = 1,2,3, . ,n (задачи аппроксимации данных);
, где i = 1,2,3, . ,n (задачи аппроксимации данных);
3) при исследовании процессов в системах, математические модели которых строятся в классе дифференциальных уравнений в частных производных. В результате разностной аппроксимации исходной модели при определенных условиях приходят к математическим соотношениям в форме СЛАУ;
4) сущность многих физических процессов математически отображается с помощью интегральных уравнений. Ввиду сложности решения многих из них исследователь предпочитает свести задачу к решению модели в форме СЛАУ, используя известные методы аппроксимации.
5) исследование систем автоматического регулирования в установившемся режиме приводит во многих случаях к статическим моделям в форме СЛАУ.
Система линейных уравнений порядка n имеет вид:

 (2.1)
(2.1)
или в векторно-матричной форме:
 (2.2)
(2.2)
где  – вектор свободных членов;
– вектор свободных членов;
 – вектор неизвестных;
– вектор неизвестных;
A – матрица коэффициентов системы, размером  .
.
2.2. Методы решения
Методы решения СЛАУ делятся на две группы: прямые (точные) и итерационные (приближенные).
Прямые методы позволяют получить решение за конечное число шагов. Итерационные методы построены по принципу многократного вычисления последовательных приближений, сходящихся к искомому решению.
Прямые методы целесообразно использовать для решения систем сравнительно небольшой размерности с плотно заполненной матрицей (матрицей, имеющей малое количество нулевых элементов). Итерационные методы предпочтительнее в задачах большой размерности со слабо заполненными матрицами.
К прямым методам относятся метод определителей, метод Гаусса и его модификации, метод LU-разложения, матричный метод и др. К разряду итерационных методов принадлежат метод простой итерации, метод Зейделя.
2.2.1. Прямые методы
2.2.1.1. Метод Гаусса
Решение СЛАУ осуществляется в два этапа (прямой и обратный ход)
Прямой ход. Исходная система (2.1) путем последовательных преобразований приводится к треугольному виду. Это достигается последовательным исключением неизвестных  из уравнений. В результате получается эквивалентная система:
из уравнений. В результате получается эквивалентная система:

 (2.3)
(2.3)
Обратный ход. С помощью подстановки  в предпоследнее (n-1)-е уравнение системы (2.3) вычисляется
в предпоследнее (n-1)-е уравнение системы (2.3) вычисляется  . Подстановкой
. Подстановкой  и
и  в (n-2)-е уравнение определяют
в (n-2)-е уравнение определяют  . Таким же образом последовательно определяют неизвестные
. Таким же образом последовательно определяют неизвестные  .
.
П р и м е р 14. Решить систему с тремя неизвестными методом Гаусса:

 (2.4)
(2.4)
Прямой ход. Первое уравнение из системы (2.4) разделим на 3:
 (2.5)
(2.5)
Из второго уравнения исключим неизвестное  Для этого ко второму уравнению прибавим преобразованное первое уравнение, умноженное на (–2). Получим:
Для этого ко второму уравнению прибавим преобразованное первое уравнение, умноженное на (–2). Получим:
 (2.6)
(2.6)
 (2.7)
(2.7)
Разделим уравнение (2.7) на  . Получим:
. Получим:
 . (2.8)
. (2.8)
Из третьего уравнения системы (2.4) исключим  . Для этого из третьего уравнения вычтем первое преобразованное (2.5):
. Для этого из третьего уравнения вычтем первое преобразованное (2.5):
 (2.9)
(2.9)
 (2.10)
(2.10)
Разделим уравнение (2.10) на  :
:
 , (2.11)
, (2.11)

 (2.12)
(2.12)
Из третьего уравнения системы (2.12) исключим неизвестное  . Для этого к третьему уравнению прибавим второе:
. Для этого к третьему уравнению прибавим второе:
 (2.13)
(2.13)
или  , (2.14)
, (2.14)
откуда выразим  :
:  .
.
Тогда эквивалентная система в треугольном виде примет вид:

 (2.15)
(2.15)
Обратный ход. Подставим значение  во второе уравнение системы (2.15) и найдем
во второе уравнение системы (2.15) и найдем  . Подстановкой значений
. Подстановкой значений  и
и  в первое уравнение найдем
в первое уравнение найдем  .
.
Если квадратная матрица  линейной системы
линейной системы
 (2.16)
(2.16)
имеет отличные от нуля главные диагональные миноры, т. е.
 (2.17)
(2.17)
то она может быть разложена на произведение двух треугольных матриц – нижней  с ненулевыми диагональными элементами и верхней –
с ненулевыми диагональными элементами и верхней –  с единичными диагональными элементами
с единичными диагональными элементами
 (2.18)
(2.18)
Поэтому матричное уравнение (2.16) можно заменить уравнением:
 (2.19)
(2.19)
Введем вектор вспомогательных переменных  Тогда уравнение (2.19) можно записать в виде системы двух векторно-матричных уравнений:
Тогда уравнение (2.19) можно записать в виде системы двух векторно-матричных уравнений:
 (2.20)
(2.20)
Таким образом, решение системы (2.16) сводится к последовательному решению двух систем с треугольными матрицами типа (2.3) или (2.15), из которых неизвестные определяются последовательной подстановкой.
Математически это выражается так: из первого уравнения системы (2.20) определяется вектор  :
:
 , (2.21)
, (2.21)
после чего из второго уравнения системы (2.19) вычисляется вектор  :
:
 . (2.22)
. (2.22)
Обратные матрицы  и
и  существуют, т. к. определители треугольных матриц L и U, вычисляемые как произведения их диагональных элементов, отличны от нуля.
существуют, т. к. определители треугольных матриц L и U, вычисляемые как произведения их диагональных элементов, отличны от нуля.
Метод LU-разложения – это фактически метод Гаусса, выраженный в векторно-матричной форме, отличающийся от классического варианта способом хранения матриц.
2.2.1.3. Матричный метод
Если для системы  выполняется условие невырожденности матрицы A
выполняется условие невырожденности матрицы A
 , (2.23)
, (2.23)
то решение этой системы можно представить в виде:
 , (2.24)
, (2.24)
где  – обратная матрица.
– обратная матрица.
2.2.2. Итерационные методы
2.2.2.1. Метод простых итераций
Исходная система уравнений (2.1) приводится к виду:

 (2.25)
(2.25)

 (2.26)
(2.26)
Задав начальные (нулевые) приближения для искомых неизвестных:
 (2.27)
(2.27)
подставляем их в правую часть системы (2.26). Получаемые при этом в левой части системы значения  представляют собой первые приближения:
представляют собой первые приближения:
 , (2.28)
, (2.28)
где 
Подставив первые приближения  в правую часть системы (2.26), в левой ее части получим вторые приближения −
в правую часть системы (2.26), в левой ее части получим вторые приближения −  :
:
 . (2.29)
. (2.29)
Таким образом, итерационный процесс описывается соотношениями:

 (2.30)
(2.30)
Полученные в результате последовательности итераций приближения:  сходятся к истинному решению системы (2.1), в том случае, если для коэффициентов системы (2.26) выполняется хотя бы одно из условий:
сходятся к истинному решению системы (2.1), в том случае, если для коэффициентов системы (2.26) выполняется хотя бы одно из условий:
 ; (2.31)
; (2.31)
 . (2.32)
. (2.32)
Вычисления продолжают до тех пор, пока не будет выполнено условие:
 (2.33)
(2.33)
где  – заданная точность.
– заданная точность.
2.2.2.2. Метод Зейделя
Метод Зейделя – модификация метода простых итераций, обеспечивающая ускорение сходимости итерационного процесса к истинному решению системы за счет следующего приема.
Уточненное значение  , полученное из первого уравнения системы (2.26) вводится во второе уравнение системы и используется для вычисления
, полученное из первого уравнения системы (2.26) вводится во второе уравнение системы и используется для вычисления  . Затем уточненные значения
. Затем уточненные значения  ,
,  вводятся в третье уравнение системы (2.26) и используются для вычисления
вводятся в третье уравнение системы (2.26) и используются для вычисления  . Таким образом, k-е приближение
. Таким образом, k-е приближение  будет определяться через уточненные в процессе k-й итерации значения
будет определяться через уточненные в процессе k-й итерации значения  . Следовательно, итерационный процесс, реализуемый в методе Зейделя, может быть выражен соотношениями:
. Следовательно, итерационный процесс, реализуемый в методе Зейделя, может быть выражен соотношениями:

 (2.34)
(2.34)
3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ В ФОРМЕ НЕЛИНЕЙНЫХ
АЛГЕБРАИЧЕСКИХ И ТРАНСЦЕНДЕНТНЫХ УРАВНЕНИЙ
3.1. Пример формирования модели
 П р и м е р 15. Моделируемый объект – нелинейная цепь постоянного тока (рис. 3.1). R2 – нелинейное сопротивление.
П р и м е р 15. Моделируемый объект – нелинейная цепь постоянного тока (рис. 3.1). R2 – нелинейное сопротивление.
По закону Кирхгофа
 (3.1)
(3.1)
Нелинейную вольт-амперную характеристику (ВАХ) элемента R2 аппроксимируем выражением:
 (3.2)
(3.2)
Сделаем подстановку выражения (3.2) в уравнение (3.1):
 (3.3)
(3.3)
 (3.4)
(3.4)
 f(i)
f(i)
Соотношение f(i) = 0 представляет собой математическую модель электрической цепи в форме нелинейного алгебраического уравнения относительно тока i. Решение этой модели позволит определить ток i в цепи при заданных значениях U и R1.
Исследование объектов различной физической природы в установившемся режиме часто приводит к статическим моделям в форме нелинейных алгебраических уравнений.
Алгебраическое уравнение  может содержать только алгебраические функции, в которых над переменной x производятся арифметические операции, возведение в степень с рациональным показателем и извлечение корня. Например:
может содержать только алгебраические функции, в которых над переменной x производятся арифметические операции, возведение в степень с рациональным показателем и извлечение корня. Например:
 (3.5)
(3.5)
 (3.6)
(3.6)
В некоторых задачах моделирование приводит к трансцендентному уравнению.
Трансцендентным называется уравнение, в состав которого входят трансцендентные функции: показательная, логарифмическая, тригонометрические функции, возведение в иррациональную степень. Например:
 (3.7)
(3.7)
 (3.8)
(3.8)
3.2. Базовые понятия
Уравнение с одним неизвестным x в общем случае имеет вид:
где z(x) и g(x) — функции, определенные на некотором числовом множестве X, называемом областью допустимых значений уравнения.
Другая форма записи уравнения с одним неизвестным имеет вид:
где f(x) = z(x) – g(x) получается в результате переноса функции g(x) в левую часть уравнения (3.9).
Всякое значение x*, которое при подстановке в уравнение (3.10) обращает его в числовое равенство, а функцию f(x) — в ноль, т. е. такое, что
 , (3.11)
, (3.11)
называется корнем уравнения, или нулем функции f(x).
Решить уравнение – значит найти все его корни (решения) или доказать, что уравнение не имеет корней.
Для алгебраических уравнений число корней известно заранее. Каждое алгебраическое уравнение степени n имеет в множестве комплексных чисел n корней с учетом кратности.
3.3. Методы решения
Аналитическое (явное) решение, т. е. решение в виде готовой формулы, выражающей неизвестное x через параметры уравнения, можно получить только для ограниченного круга уравнений, например формулы для вычисления корней квадратного (аx2+bx+c=0) и кубического (x3+px+q=0) уравнений. Решение некоторых простейших трансцендентных уравнений может быть получено в аналитической форме с использованием степенных рядов, непрерывных дробей и т. д.
В большинстве случаев найти явное решение уравнения очень сложно или невозможно. Кроме того, использование аналитических формул для решения большинства уравнений не может обеспечить получение точного значения корня, поскольку коэффициенты уравнения являются приближенными величинами, определенными в результате измерений. Поэтому задача отыскания точного значения корня теряет смысл.
Ставится задача – определить приближенное значение корня уравнения с заданной точностью.
Приближенное решение математических задач лежит в основе численных методов.
3.3.1. Особенности численных методов решения
3.3.1.1. Этапы численного решения нелинейного уравнения
Численное решение уравнения f(x) = 0 (речь идет о действительных корнях) проводят в два этапа:
1) отделение корней, т. е. отыскание таких достаточно малых отрезков в области допустимых значений x, в которых содержится только один корень;
2) уточнение корней, т. е. вычисление корней с заданной точностью.
 3.3.1.2. Отделение корней
3.3.1.2. Отделение корней
Рассмотрим несколько способов отделения корней.
С п о с о б 1 – по графику функции y = f(x).
приближенно определяется как абсцисса точки пересечения графика с осью Оx (рис. 3.2). Устанавливаются границы a и b отрезка, в пределах которого заключен только один корень x*.
С п о с о б 2 – уравнение f(x) = 0 заменяют равносильным:
 . (3.13)
. (3.13)
Строят графики функций  и
и 
Приближенное значение корня определяют как абсциссу точки пересечения этих графиков.
Например: отделим корень уравнения
 (3.14)
(3.14)
 для области значений аргумента x > 0.
для области значений аргумента x > 0.
Преобразуем уравнение (3.14) к виду:
 (3.15)
(3.15)
где 
Строим графики (рис. 3.3) и находим приближенно x* и отрезок  .
.
С п о с о б 3 – по таблице значений функции f(x) на интересующем интервале изменения аргумента x. Например, представим таблицу (табл.3.1) значений функции
 . (3.16)
. (3.16)
Из данных табл. 3.1 видно, что корень уравнения существует и его следует искать на отрезке [7,0; 10,0], так как значения функции на концах этого отрезка имеют разные знаки.
Таблица значений функции
С п о с о б 4 – аналитический метод отделения корней, который базируется на знании следующих свойств функции:
а) если функция  непрерывна на отрезке
непрерывна на отрезке  и принимает на концах этого отрезка значения разных знаков, то внутри отрезка
и принимает на концах этого отрезка значения разных знаков, то внутри отрезка  существует по крайней мере один корень уравнения
существует по крайней мере один корень уравнения  ;
;
б) если функция  непрерывна и монотонна на отрезке
непрерывна и монотонна на отрезке  и принимает на концах отрезка значения разных знаков, а производная
и принимает на концах отрезка значения разных знаков, а производная  сохраняет постоянный знак внутри отрезка, то внутри этого отрезка существует корень уравнения
сохраняет постоянный знак внутри отрезка, то внутри этого отрезка существует корень уравнения  и притом единственный.
и притом единственный.
Функция  называется монотонной в заданном интервале, если при любых
называется монотонной в заданном интервале, если при любых  из этого интервала она удовлетворяет условию
из этого интервала она удовлетворяет условию  (монотонно возрастающая функция)
(монотонно возрастающая функция)
или  (монотонно убывающая функция).
(монотонно убывающая функция).
Необходимым и достаточным условием монотонности функции в заданном интервале является выполнение для всех внутренних точек этого интервала условия  или
или 
Зная свойства функции , можно сделать вывод о характере графика  , что может существенно облегчить процесс отыскания корней. Продемонстрируем это для непрерывной и монотонной на отрезке функции
, что может существенно облегчить процесс отыскания корней. Продемонстрируем это для непрерывной и монотонной на отрезке функции  , которая принимает на концах отрезка значения разных знаков, имеет во всех точках интервала первую и вторую производные
, которая принимает на концах отрезка значения разных знаков, имеет во всех точках интервала первую и вторую производные  и
и  , сохраняющие постоянный знак (рис. 3.4).
, сохраняющие постоянный знак (рис. 3.4).
3.3.1.3. Уточнение корней
Рассмотрим несколько численных методов уточнения корней, применяемых для решения как алгебраических, так и трансцендентных уравнений. Эти методы относятся к разряду итерационных.
Итерационный процесс состоит в последовательном шаг за шагом уточнении начального приближения x0 искомого корня. Каждый шаг такого метода называется итерацией.
 |
В результате реализации итерационного метода получают последовательность приближенных значений корня  Если эти значения с увеличением n приближаются к истинному значению корня x*, то говорят, что итерационный процесс сходится.
Если эти значения с увеличением n приближаются к истинному значению корня x*, то говорят, что итерационный процесс сходится.
3.3.1.3.1. Метод половинного деления (дихотомии, бисекции)
Пусть дано уравнение
 (3.17)
(3.17)
где функция  непрерывна и монотонна на отрезке и имеет на концах отрезка разные знаки:
непрерывна и монотонна на отрезке и имеет на концах отрезка разные знаки:
 (3.18)
(3.18)
 Требуется найти корень
Требуется найти корень  уравнения (3.17) с точностью до
уравнения (3.17) с точностью до  График функции представлен на рис. 3.5.
График функции представлен на рис. 3.5.
Рассмотрим суть и этапы реализации метода половинного деления.
1) Отрезок  делим пополам и определяем середину отрезка:
делим пополам и определяем середину отрезка:
 (3.19)
(3.19)
2) Вычисляем значение функции в точке  Если
Если  , то
, то  является корнем уравнения. Если
является корнем уравнения. Если  то поиск корня продолжается на одном из двух полученных отрезков –
то поиск корня продолжается на одном из двух полученных отрезков –  или
или  . Следует выбрать тот отрезок, на концах которого функция принимает значения противоположных знаков. В данном случае (см. рис. 3.5) выбираем отрезок
. Следует выбрать тот отрезок, на концах которого функция принимает значения противоположных знаков. В данном случае (см. рис. 3.5) выбираем отрезок  , так как для него выполняется условие:
, так как для него выполняется условие:  Для того чтобы сохранить в дальнейших расчетах единое обозначение
Для того чтобы сохранить в дальнейших расчетах единое обозначение  текущего отрезка, на котором ведется поиск корня на данном шаге вычислений, необходимо параметру b присвоить новое значение
текущего отрезка, на котором ведется поиск корня на данном шаге вычислений, необходимо параметру b присвоить новое значение  : b =
: b =  . С точки зрения геометрической интерпретации (см. рис. 3.5) это означает, что правая граница исходного отрезка точка b переносится в точку а оставшаяся за пределами точки часть графика дальше не рассматривается.
. С точки зрения геометрической интерпретации (см. рис. 3.5) это означает, что правая граница исходного отрезка точка b переносится в точку а оставшаяся за пределами точки часть графика дальше не рассматривается.
Решение систем линейных алгебраических уравнений, методы решения, примеры.
Решение систем линейных алгебраических уравнений (СЛАУ), несомненно, является важнейшей темой курса линейной алгебры. Огромное количество задач из всех разделов математики сводится к решению систем линейных уравнений. Этими факторами объясняется причина создания данной статьи. Материал статьи подобран и структурирован так, что с его помощью Вы сможете
- подобрать оптимальный метод решения Вашей системы линейных алгебраических уравнений,
- изучить теорию выбранного метода,
- решить Вашу систему линейных уравнений, рассмотрев подробно разобранные решения характерных примеров и задач.
Краткое описание материала статьи.
Сначала дадим все необходимые определения, понятия и введем обозначения.
Далее рассмотрим методы решения систем линейных алгебраических уравнений, в которых число уравнений равно числу неизвестных переменных и которые имеют единственное решение. Во-первых, остановимся на методе Крамера, во-вторых, покажем матричный метод решения таких систем уравнений, в-третьих, разберем метод Гаусса (метод последовательного исключения неизвестных переменных). Для закрепления теории обязательно решим несколько СЛАУ различными способами.
После этого перейдем к решению систем линейных алгебраических уравнений общего вида, в которых число уравнений не совпадает с числом неизвестных переменных или основная матрица системы является вырожденной. Сформулируем теорему Кронекера — Капелли, которая позволяет установить совместность СЛАУ. Разберем решение систем (в случае их совместности) с помощью понятия базисного минора матрицы. Также рассмотрим метод Гаусса и подробно опишем решения примеров.
Обязательно остановимся на структуре общего решения однородных и неоднородных систем линейных алгебраических уравнений. Дадим понятие фундаментальной системы решений и покажем, как записывается общее решение СЛАУ с помощью векторов фундаментальной системы решений. Для лучшего понимания разберем несколько примеров.
В заключении рассмотрим системы уравнений, сводящиеся к линейным, а также различные задачи, при решении которых возникают СЛАУ.
Навигация по странице.
Определения, понятия, обозначения.
Будем рассматривать системы из p линейных алгебраических уравнений с n неизвестными переменными ( p может быть равно n ) вида

 — неизвестные переменные,
— неизвестные переменные,  — коэффициенты (некоторые действительные или комплексные числа),
— коэффициенты (некоторые действительные или комплексные числа),  — свободные члены (также действительные или комплексные числа).
— свободные члены (также действительные или комплексные числа).
Такую форму записи СЛАУ называют координатной.
В матричной форме записи эта система уравнений имеет вид  ,
,
где  — основная матрица системы,
— основная матрица системы,  — матрица-столбец неизвестных переменных,
— матрица-столбец неизвестных переменных,  — матрица-столбец свободных членов.
— матрица-столбец свободных членов.
Если к матрице А добавить в качестве (n+1)-ого столбца матрицу-столбец свободных членов, то получим так называемую расширенную матрицу системы линейных уравнений. Обычно расширенную матрицу обозначают буквой Т , а столбец свободных членов отделяют вертикальной линией от остальных столбцов, то есть,

Решением системы линейных алгебраических уравнений называют набор значений неизвестных переменных  , обращающий все уравнения системы в тождества. Матричное уравнение при данных значениях неизвестных переменных также обращается в тождество
, обращающий все уравнения системы в тождества. Матричное уравнение при данных значениях неизвестных переменных также обращается в тождество  .
.
Если система уравнений имеет хотя бы одно решение, то она называется совместной.
Если система уравнений решений не имеет, то она называется несовместной.
Если СЛАУ имеет единственное решение, то ее называют определенной; если решений больше одного, то – неопределенной.
Если свободные члены всех уравнений системы равны нулю  , то система называется однородной, в противном случае – неоднородной.
, то система называется однородной, в противном случае – неоднородной.
Решение элементарных систем линейных алгебраических уравнений.
Если число уравнений системы равно числу неизвестных переменных и определитель ее основной матрицы не равен нулю, то такие СЛАУ будем называть элементарными. Такие системы уравнений имеют единственное решение, причем в случае однородной системы все неизвестные переменные равны нулю.
Такие СЛАУ мы начинали изучать в средней школе. При их решении мы брали какое-нибудь одно уравнение, выражали одну неизвестную переменную через другие и подставляли ее в оставшиеся уравнения, следом брали следующее уравнение, выражали следующую неизвестную переменную и подставляли в другие уравнения и так далее. Или пользовались методом сложения, то есть, складывали два или более уравнений, чтобы исключить некоторые неизвестные переменные. Не будем подробно останавливаться на этих методах, так как они по сути являются модификациями метода Гаусса.
Основными методами решения элементарных систем линейных уравнений являются метод Крамера, матричный метод и метод Гаусса. Разберем их.
Решение систем линейных уравнений методом Крамера.
Пусть нам требуется решить систему линейных алгебраических уравнений

в которой число уравнений равно числу неизвестных переменных и определитель основной матрицы системы отличен от нуля, то есть,  .
.
Пусть  — определитель основной матрицы системы, а
— определитель основной матрицы системы, а  — определители матриц, которые получаются из А заменой 1-ого, 2-ого, …, n-ого столбца соответственно на столбец свободных членов:
— определители матриц, которые получаются из А заменой 1-ого, 2-ого, …, n-ого столбца соответственно на столбец свободных членов:

При таких обозначениях неизвестные переменные вычисляются по формулам метода Крамера как  . Так находится решение системы линейных алгебраических уравнений методом Крамера.
. Так находится решение системы линейных алгебраических уравнений методом Крамера.
Решите систему линейных уравнений методом Крамера  .
.
Основная матрица системы имеет вид  . Вычислим ее определитель (при необходимости смотрите статью определитель матрицы: определение, методы вычисления, примеры, решения):
. Вычислим ее определитель (при необходимости смотрите статью определитель матрицы: определение, методы вычисления, примеры, решения):

Так как определитель основной матрицы системы отличен от нуля, то система имеет единственное решение, которое может быть найдено методом Крамера.
Составим и вычислим необходимые определители  (определитель
(определитель  получаем, заменив в матрице А первый столбец на столбец свободных членов
получаем, заменив в матрице А первый столбец на столбец свободных членов  , определитель
, определитель  — заменив второй столбец на столбец свободных членов,
— заменив второй столбец на столбец свободных членов,  — заменив третий столбец матрицы А на столбец свободных членов):
— заменив третий столбец матрицы А на столбец свободных членов):

Находим неизвестные переменные по формулам  :
:

Основным недостатком метода Крамера (если это можно назвать недостатком) является трудоемкость вычисления определителей, когда число уравнений системы больше трех.
Для более детальной информации смотрите раздел метод Крамера: вывод формул, примеры, решения.
Решение систем линейных алгебраических уравнений матричным методом (с помощью обратной матрицы).
Пусть система линейных алгебраических уравнений задана в матричной форме , где матрица A имеет размерность n на n и ее определитель отличен от нуля.
Так как , то матрица А – обратима, то есть, существует обратная матрица  . Если умножить обе части равенства на слева, то получим формулу для нахождения матрицы-столбца неизвестных переменных
. Если умножить обе части равенства на слева, то получим формулу для нахождения матрицы-столбца неизвестных переменных  . Так мы получили решение системы линейных алгебраических уравнений матричным методом.
. Так мы получили решение системы линейных алгебраических уравнений матричным методом.
Решите систему линейных уравнений матричным методом.
Перепишем систему уравнений в матричной форме:

Так как
то СЛАУ можно решать матричным методом. С помощью обратной матрицы решение этой системы может быть найдено как  .
.
Построим обратную матрицу с помощью матрицы из алгебраических дополнений элементов матрицы А (при необходимости смотрите статью методы нахождения обратной матрицы):

Осталось вычислить  — матрицу неизвестных переменных, умножив обратную матрицу
— матрицу неизвестных переменных, умножив обратную матрицу  на матрицу-столбец свободных членов
на матрицу-столбец свободных членов  (при необходимости смотрите статью операции над матрицами):
(при необходимости смотрите статью операции над матрицами):

 или в другой записи x1 = 4, x2 = 0, x3 = -1 .
или в другой записи x1 = 4, x2 = 0, x3 = -1 .
Основная проблема при нахождении решения систем линейных алгебраических уравнений матричным методом заключается в трудоемкости нахождения обратной матрицы, особенно для квадратных матриц порядка выше третьего.
Более подробное описание теории и дополнительные примеры смотрите в статье матричный метод решения систем линейных уравнений.
Решение систем линейных уравнений методом Гаусса.
Пусть нам требуется найти решение системы из n линейных уравнений с n неизвестными переменными 
определитель основной матрицы которой отличен от нуля.
Суть метода Гаусса состоит в последовательном исключении неизвестных переменных: сначала исключается x1 из всех уравнений системы, начиная со второго, далее исключается x2 из всех уравнений, начиная с третьего, и так далее, пока в последнем уравнении останется только неизвестная переменная xn . Такой процесс преобразования уравнений системы для последовательного исключения неизвестных переменных называется прямым ходом метода Гаусса. После завершения прямого хода метода Гаусса из последнего уравнения находится xn , с помощью этого значения из предпоследнего уравнения вычисляется xn-1 , и так далее, из первого уравнения находится x1 . Процесс вычисления неизвестных переменных при движении от последнего уравнения системы к первому называется обратным ходом метода Гаусса.
Кратко опишем алгоритм исключения неизвестных переменных.
Будем считать, что  , так как мы всегда можем этого добиться перестановкой местами уравнений системы. Исключим неизвестную переменную x1 из всех уравнений системы, начиная со второго. Для этого ко второму уравнению системы прибавим первое, умноженное на
, так как мы всегда можем этого добиться перестановкой местами уравнений системы. Исключим неизвестную переменную x1 из всех уравнений системы, начиная со второго. Для этого ко второму уравнению системы прибавим первое, умноженное на  , к третьему уравнению прибавим первое, умноженное на
, к третьему уравнению прибавим первое, умноженное на  , и так далее, к n-ому уравнению прибавим первое, умноженное на
, и так далее, к n-ому уравнению прибавим первое, умноженное на  . Система уравнений после таких преобразований примет вид
. Система уравнений после таких преобразований примет вид

где  , а
, а  .
.
К такому же результату мы бы пришли, если бы выразили x1 через другие неизвестные переменные в первом уравнении системы и полученное выражение подставили во все остальные уравнения. Таким образом, переменная x1 исключена из всех уравнений, начиная со второго.
Далее действуем аналогично, но лишь с частью полученной системы, которая отмечена на рисунке

Будем считать, что  (в противном случае мы переставим местами вторую строку с k-ой , где
(в противном случае мы переставим местами вторую строку с k-ой , где  ). Приступаем к исключению неизвестной переменной x2 из всех уравнений, начиная с третьего.
). Приступаем к исключению неизвестной переменной x2 из всех уравнений, начиная с третьего.
Для этого к третьему уравнению системы прибавим второе, умноженное на  , к четвертому уравнению прибавим второе, умноженное на
, к четвертому уравнению прибавим второе, умноженное на  , и так далее, к n-ому уравнению прибавим второе, умноженное на
, и так далее, к n-ому уравнению прибавим второе, умноженное на  . Система уравнений после таких преобразований примет вид
. Система уравнений после таких преобразований примет вид

где  , а
, а  . Таким образом, переменная x2 исключена из всех уравнений, начиная с третьего.
. Таким образом, переменная x2 исключена из всех уравнений, начиная с третьего.
Далее приступаем к исключению неизвестной x3 , при этом действуем аналогично с отмеченной на рисунке частью системы

Так продолжаем прямой ход метода Гаусса пока система не примет вид

С этого момента начинаем обратный ход метода Гаусса: вычисляем xn из последнего уравнения как  , с помощью полученного значения xn находим xn-1 из предпоследнего уравнения, и так далее, находим x1 из первого уравнения.
, с помощью полученного значения xn находим xn-1 из предпоследнего уравнения, и так далее, находим x1 из первого уравнения.
Решите систему линейных уравнений методом Гаусса.
Исключим неизвестную переменную x1 из второго и третьего уравнения системы. Для этого к обеим частям второго и третьего уравнений прибавим соответствующие части первого уравнения, умноженные на  и на
и на  соответственно:
соответственно:

Теперь из третьего уравнения исключим x2 , прибавив к его левой и правой частям левую и правую части второго уравнения, умноженные на  :
:

На этом прямой ход метода Гаусса закончен, начинаем обратный ход.
Из последнего уравнения полученной системы уравнений находим x3 :

Из второго уравнения получаем  .
.
Из первого уравнения находим оставшуюся неизвестную переменную и этим завершаем обратный ход метода Гаусса  .
.
Более детальную информацию и дополнительные примеры смотрите в разделе решение элементарных систем линейных алгебраических уравнений методом Гаусса.
Решение систем линейных алгебраических уравнений общего вида.
В общем случае число уравнений системы p не совпадает с числом неизвестных переменных n :
Такие СЛАУ могут не иметь решений, иметь единственное решение или иметь бесконечно много решений. Это утверждение относится также к системам уравнений, основная матрица которых квадратная и вырожденная.
Далее нам потребуется понятие минора матрицы и ранга матрицы, которые даны в статье ранг матрицы: определение, методы нахождения, примеры, решения.
Теорема Кронекера – Капелли.
Прежде чем находить решение системы линейных уравнений необходимо установить ее совместность. Ответ на вопрос когда СЛАУ совместна, а когда несовместна, дает теорема Кронекера – Капелли:
для того, чтобы система из p уравнений с n неизвестными ( p может быть равно n ) была совместна необходимо и достаточно, чтобы ранг основной матрицы системы был равен рангу расширенной матрицы, то есть, Rank(A)=Rank(T) .
Рассмотрим на примере применение теоремы Кронекера – Капелли для определения совместности системы линейных уравнений.
Выясните, имеет ли система линейных уравнений  решения.
решения.
Найдем ранг основной матрицы системы  . Воспользуемся методом окаймляющих миноров. Минор второго порядка
. Воспользуемся методом окаймляющих миноров. Минор второго порядка  отличен от нуля. Переберем окаймляющие его миноры третьего порядка:
отличен от нуля. Переберем окаймляющие его миноры третьего порядка:

Так как все окаймляющие миноры третьего порядка равны нулю, то ранг основной матрицы равен двум.
В свою очередь ранг расширенной матрицы  равен трем, так как минор третьего порядка
равен трем, так как минор третьего порядка

отличен от нуля.
Таким образом, , следовательно, по теореме Кронекера – Капелли можно сделать вывод, что исходная система линейных уравнений несовместна.
система решений не имеет.
Итак, мы научились устанавливать несовместность системы с помощью теоремы Кронекера – Капелли.
А как же находить решение СЛАУ, если установлена ее совместность?
Для этого нам потребуется понятие базисного минора матрицы и теорема о ранге матрицы.
Минор наивысшего порядка матрицы А , отличный от нуля, называется базисным.
Из определения базисного минора следует, что его порядок равен рангу матрицы. Для ненулевой матрицы А базисных миноров может быть несколько, один базисный минор есть всегда.
Для примера рассмотрим матрицу  .
.
Все миноры третьего порядка этой матрицы равны нулю, так как элементы третьей строки этой матрицы представляют собой сумму соответствующих элементов первой и второй строк.
Базисными являются следующие миноры второго порядка, так как они отличны от нуля

Миноры  базисными не являются, так как равны нулю.
базисными не являются, так как равны нулю.
Теорема о ранге матрицы.
Если ранг матрицы порядка p на n равен r , то все элементы строк (и столбцов) матрицы, не образующие выбранный базисный минор, линейно выражаются через соответствующие элементы строк (и столбцов), образующих базисный минор.
Что нам дает теорема о ранге матрицы?
Если по теореме Кронекера – Капелли мы установили совместность системы, то выбираем любой базисный минор основной матрицы системы (его порядок равен r ), и исключаем из системы все уравнения, которые не образуют выбранный базисный минор. Полученная таким образом СЛАУ будет эквивалентна исходной, так как отброшенные уравнения все равно излишни (они согласно теореме о ранге матрицы являются линейной комбинацией оставшихся уравнений).
В итоге, после отбрасывания излишних уравнений системы, возможны два случая.
Если число уравнений r в полученной системе будет равно числу неизвестных переменных, то она будет определенной и единственное решение можно будет найти методом Крамера, матричным методом или методом Гаусса.
Решите систему линейных алгебраических уравнений  .
.
Ранг основной матрицы системы  равен двум, так как минор второго порядка
равен двум, так как минор второго порядка  отличен от нуля. Ранг расширенной матрицы
отличен от нуля. Ранг расширенной матрицы  также равен двум, так как единственный минор третьего порядка равен нулю
также равен двум, так как единственный минор третьего порядка равен нулю

а рассмотренный выше минор второго порядка отличен от нуля. На основании теоремы Кронекера – Капелли можно утверждать совместность исходной системы линейных уравнений, так как Rank(A)=Rank(T)=2 .
В качестве базисного минора возьмем . Его образуют коэффициенты первого и второго уравнений:

Третье уравнение системы не участвует в образовании базисного минора, поэтому исключим его из системы на основании теоремы о ранге матрицы:

Так мы получили элементарную систему линейных алгебраических уравнений. Решим ее методом Крамера:

Если число уравнений r в полученной СЛАУ меньше числа неизвестных переменных n , то в левых частях уравнений оставляем слагаемые, образующие базисный минор, остальные слагаемые переносим в правые части уравнений системы с противоположным знаком.
Неизвестные переменные (их r штук), оставшиеся в левых частях уравнений, называются основными.
Неизвестные переменные (их штук), которые оказались в правых частях, называются свободными.
Теперь считаем, что свободные неизвестные переменные могут принимать произвольные значения, при этом r основных неизвестных переменных будут выражаться через свободные неизвестные переменные единственным образом. Их выражение можно найти решая полученную СЛАУ методом Крамера, матричным методом или методом Гаусса.
Разберем на примере.
Решите систему линейных алгебраических уравнений  .
.
Найдем ранг основной матрицы системы  методом окаймляющих миноров. В качестве ненулевого минора первого порядка возьмем . Начнем поиск ненулевого минора второго порядка, окаймляющего данный минор:
методом окаймляющих миноров. В качестве ненулевого минора первого порядка возьмем . Начнем поиск ненулевого минора второго порядка, окаймляющего данный минор:

Так мы нашли ненулевой минор второго порядка. Начнем поиск ненулевого окаймляющего минора третьего порядка:

Таким образом, ранг основной матрицы равен трем. Ранг расширенной матрицы также равен трем, то есть, система совместна.
Найденный ненулевой минор третьего порядка возьмем в качестве базисного.
Для наглядности покажем элементы, образующие базисный минор:

Оставляем в левой части уравнений системы слагаемые, участвующие в базисном миноре, остальные переносим с противоположными знаками в правые части:

Придадим свободным неизвестным переменным x2 и x5 произвольные значения, то есть, примем  , где
, где  — произвольные числа. При этом СЛАУ примет вид
— произвольные числа. При этом СЛАУ примет вид

Полученную элементарную систему линейных алгебраических уравнений решим методом Крамера:

Следовательно,  .
.
В ответе не забываем указать свободные неизвестные переменные.
 , где — произвольные числа.
, где — произвольные числа.
Чтобы решить систему линейных алгебраических уравнений общего вида, сначала выясняем ее совместность, используя теорему Кронекера – Капелли. Если ранг основной матрицы не равен рангу расширенной матрицы, то делаем вывод о несовместности системы.
Если ранг основной матрицы равен рангу расширенной матрицы, то выбираем базисный минор и отбрасываем уравнения системы, которые не участвуют в образовании выбранного базисного минора.
Если порядок базисного минора равен числу неизвестных переменных, то СЛАУ имеет единственное решение, которое находим любым известным нам методом.
Если порядок базисного минора меньше числа неизвестных переменных, то в левой части уравнений системы оставляем слагаемые с основными неизвестными переменными, остальные слагаемые переносим в правые части и придаем свободным неизвестным переменным произвольные значения. Из полученной системы линейных уравнений находим основные неизвестные переменные методом Крамера, матричным методом или методом Гаусса.
Метод Гаусса для решения систем линейных алгебраических уравнений общего вида.
Методом Гаусса можно решать системы линейных алгебраических уравнений любого вида без предварительного их исследования на совместность. Процесс последовательного исключения неизвестных переменных позволяет сделать вывод как о совместности, так и о несовместности СЛАУ, а в случае существования решения дает возможность отыскать его.
С точки зрения вычислительной работы метод Гаусса является предпочтительным.
Запись общего решения однородных и неоднородных систем линейных алгебраических с помощью векторов фундаментальной системы решений.
В этом разделе речь пойдет о совместных однородных и неоднородных системах линейных алгебраических уравнений, имеющих бесконечное множество решений.
Разберемся сначала с однородными системами.
Фундаментальной системой решений однородной системы из p линейных алгебраических уравнений с n неизвестными переменными называют совокупность линейно независимых решений этой системы, где r – порядок базисного минора основной матрицы системы.
Если обозначить линейно независимые решения однородной СЛАУ как ( – это матрицы столбцы размерности n на 1 ), то общее решение этой однородной системы  представляется в виде линейной комбинации векторов фундаментальной системы решений с произвольными постоянными коэффициентами , то есть,
представляется в виде линейной комбинации векторов фундаментальной системы решений с произвольными постоянными коэффициентами , то есть,  .
.
Что обозначает термин общее решение однородной системы линейных алгебраических уравнений (орослау)?
Смысл прост: формула задает все возможные решения исходной СЛАУ, другими словами, взяв любой набор значений произвольных постоянных , по формуле мы получим одно из решений исходной однородной СЛАУ.
Таким образом, если мы найдем фундаментальную систему решений, то мы сможем задать все решения этой однородной СЛАУ как .
Покажем процесс построения фундаментальной системы решений однородной СЛАУ.
Выбираем базисный минор исходной системы линейных уравнений, исключаем все остальные уравнения из системы и переносим в правые части уравнений системы с противоположными знаками все слагаемые, содержащие свободные неизвестные переменные. Придадим свободным неизвестным переменным значения 1,0,0,…,0 и вычислим основные неизвестные, решив полученную элементарную систему линейных уравнений любым способом, например, методом Крамера. Так будет получено X (1) — первое решение фундаментальной системы. Если придать свободным неизвестным значения 0,1,0,0,…,0 и вычислить при этом основные неизвестные, то получим X (2) . И так далее. Если свободным неизвестным переменным придадим значения 0,0,…,0,1 и вычислим основные неизвестные, то получим X (n-r) . Так будет построена фундаментальная система решений однородной СЛАУ и может быть записано ее общее решение в виде .
Для неоднородных систем линейных алгебраических уравнений общее решение представляется в виде  , где — общее решение соответствующей однородной системы, а
, где — общее решение соответствующей однородной системы, а  — частное решение исходной неоднородной СЛАУ, которое мы получаем, придав свободным неизвестным значения 0,0,…,0 и вычислив значения основных неизвестных.
— частное решение исходной неоднородной СЛАУ, которое мы получаем, придав свободным неизвестным значения 0,0,…,0 и вычислив значения основных неизвестных.
Разберем на примерах.
Найдите фундаментальную систему решений и общее решение однородной системы линейных алгебраических уравнений  .
.
Ранг основной матрицы однородных систем линейных уравнений всегда равен рангу расширенной матрицы. Найдем ранг основной матрицы методом окаймляющих миноров. В качестве ненулевого минора первого порядка возьмем элемент основной матрицы системы. Найдем окаймляющий ненулевой минор второго порядка:

Минор второго порядка, отличный от нуля, найден. Переберем окаймляющие его миноры третьего порядка в поисках ненулевого:

Все окаймляющие миноры третьего порядка равны нулю, следовательно, ранг основной и расширенной матрицы равен двум. Базисным минором возьмем  . Отметим для наглядности элементы системы, которые его образуют:
. Отметим для наглядности элементы системы, которые его образуют:

Третье уравнение исходной СЛАУ не участвует в образовании базисного минора, поэтому, может быть исключено:

Оставляем в правых частях уравнений слагаемые, содержащие основные неизвестные, а в правые части переносим слагаемые со свободными неизвестными:

Построим фундаментальную систему решений исходной однородной системы линейных уравнений. Фундаментальная система решений данной СЛАУ состоит из двух решений, так как исходная СЛАУ содержит четыре неизвестных переменных, а порядок ее базисного минора равен двум. Для нахождения X (1) придадим свободным неизвестным переменным значения , тогда основные неизвестные найдем из системы уравнений  .
.
Решим ее методом Крамера:

Таким образом,  .
.
Теперь построим X (2) . Для этого придадим свободным неизвестным переменным значения , тогда основные неизвестные найдем из системы линейных уравнений  .
.
Опять воспользуемся методом Крамера:

Получаем  .
.
Так мы получили два вектора фундаментальной системы решений и , теперь мы можем записать общее решение однородной системы линейных алгебраических уравнений:  , где C1 и C2 – произвольные числа.
, где C1 и C2 – произвольные числа.
Найдите общее решение неоднородной системы линейных алгебраических уравнений  .
.
Общее решение этой системы уравнений будем искать в виде .
Исходной неоднородной СЛАУ соответствует однородная система
общее решение которой мы нашли в предыдущем примере .
Следовательно, нам осталось найти частное решение неоднородной системы линейных алгебраических уравнений .
Ранг основной матрицы системы равен двум, ранг расширенной матрицы системы также равен двум, так как все миноры третьего порядка, окаймляющие минор , равны нулю. Также примем минор в качестве базисного, исключим третье уравнение из системы и перенесем слагаемые со свободными неизвестными в правые части уравнений системы:

Для нахождения придадим свободным неизвестным переменным значения , тогда система уравнений примет вид  , откуда методом Крамера найдем основные неизвестные переменные:
, откуда методом Крамера найдем основные неизвестные переменные:

Имеем  , следовательно,
, следовательно, 
где C1 и C2 – произвольные числа.
Следует заметить, что решения неопределенной однородной системы линейных алгебраических уравнений порождают линейное пространство размерности , базисом которого является фундаментальная система решений.
Решение систем уравнений, сводящихся к СЛАУ.
Некоторые системы уравнений с помощью замены переменных можно свести к линейным. Рассмотрим несколько примеров.