- Инструменты сайта
- Основное
- Навигация
- Информация
- Действия
- Содержание
- Матрица Якоби и якобиан
- Определение и основные свойства
- Функциональная зависимость
- Якобиан как коэффициент растяжения
- Неявная функция
- Геометрические приложения
- Решение системы нелинейных уравнений
- 13.3 Матрица Якоби
- Системы дифференциальных уравнений с примерами решения и образцами выполнения
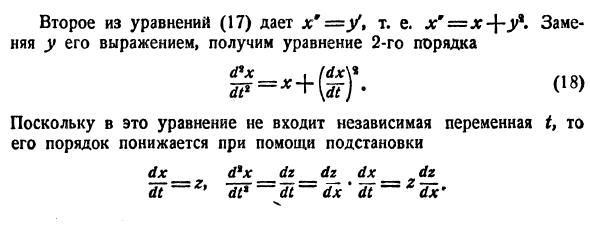
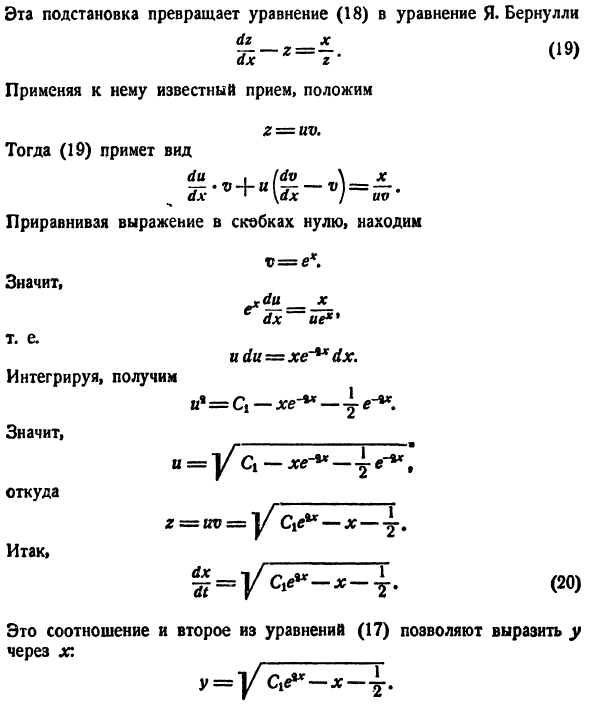
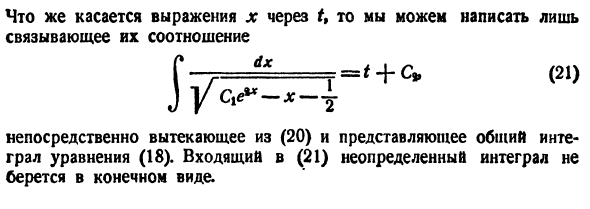
- Решение систем дифференциальных уравнений
- Методы интегрирования систем дифференциальных уравнений
- Метод исключения
- Метод интегрируемых комбинаций
- Системы линейных дифференциальных уравнений
- Фундаментальная матрица
- Квадратная матрица
- Метод вариации постоянных
- Системы линейных дифференциальных уравнений с постоянными коэффициентами
- Метод Эйлера
- Матричный метод
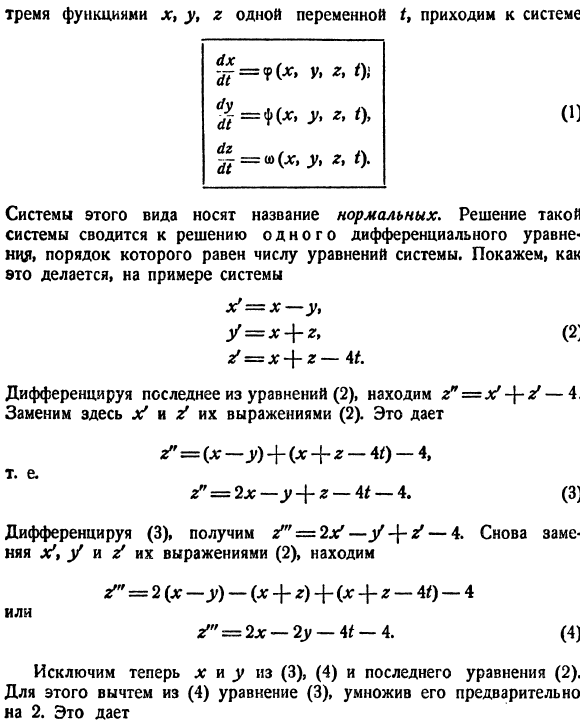
- Понятие о системах дифференциальных уравнений
- 🔍 Видео
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Вспомогательная страница к разделам ОПРЕДЕЛИТЕЛЬ и ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ
Видео:Решение системы дифференциальных уравнений методом ЭйлераСкачать

Матрица Якоби и якобиан
Видео:2.2 Итерационные методы решения СЛАУ (Якоби, Зейделя, релаксации)Скачать

Определение и основные свойства
Матрицей Якоби системы из $ m_ $ функций $ <f_1(x_1,dots,x_n),dots,f_m(x_,dots,x_n)> $ по переменным $ x_,dots,x_n $ называется матрица, составленная из всевозможных частных производных: $$ mathbf J = left[ frac right]_ = left( begin / & / & dots & / \ / & / & dots & / \ dots & && dots \ / & / & dots & / end right) , . $$ В частном случае $ m_=1 $ матрица Якоби состоит из одной строки: этот вектор в $ mathbb R_^ $ или $ mathbb C^ $ называется градиентом функции $ f_ $ (в точке $ (x_1,dots,x_) $): $$ operatorname (f) = left( frac,dots, frac right) . $$
Можно сказать, что в общем случае системы функций их матрица Якоби состоит из строк, являющихся градиентами этих функций.
Пример. Для системы линейных функций
$$f_1=a_x_1+dots+a_x_n — b_1,dots, f_m=a_x_1+dots+a_x_n — b_m $$ матрица Якоби будет матрицей коэффициентов при переменных: $$ mathbf J = left(begin a_ & a_ & dots & a_ \ dots & && dots \ a_ & a_ & dots & a_ end right) . $$
В частном случае $ m=n_ $ матрица Якоби становится квадратной и тогда ее определитель называется якобианом или определителем Якоби или функциональным определителем системы из $ n_ $ функций $ <f_1(x_1,dots,x_n),dots,f_(x_1,dots,x_n)> $ по переменным $ x_,dots,x_n $: $$ (x_1,dots,x_n)=frac= $$ $$ =left| begin / & / & dots & / \ / & / & dots & / \ dots & && dots \ / & / & dots & / end right|= det left[ frac right]_^n . $$ В этом же случае след матрицы Якоби называется дивергенцией вектора $ (f_1,f_2,dots,f_n) $: $$ operatorname
Пример. Якобиан системы двух функций $ $ равен
Теорема [Якоби]. Если $ A_,dots,A_ $ — алгебраические дополнения элементов $ j_ $-й строки якобиана, то
Видео:Видеоурок "Системы дифференциальных уравнений"Скачать

Функциональная зависимость
Следующая теорема и ее следствия являются прямыми обобщениями соответствующих результатов из линейной алгебры.
Теорема. Якобиан системы функций $ < f_,f_2,dots,f_n > $ тождественно равен нулю в некоторой области $ mathbb_ $:
$$ frac equiv 0 mbox mbox mbox X in mathbb $$ тогда и только тогда, когда между этими функциями имеется функциональная зависимость в $ mathbb $, т.е. существует функция $ G(y_1,y_2,dots,y_n) notequiv 0 $ такая, что $$ G(f_1(X),f_2(X),dots,f_n(X))equiv 0 mbox mbox mbox X in mathbb . $$
Приведем соображения, показывающие необходимость обращения якобиана в нуль для существования функциональной зависимости в системе функций $ $. Дополнительно предположим, что у функции $ G $ существуют частные производные по ее аргументам. Продифференцируем тождество $ G(f_1(X),f_2(X),dots,f_n(X))equiv 0 $ по $ x_1,dots,x_n $. Получим систему тождеств $$ left<begin frac frac+ & frac frac+ &dots + frac frac & equiv 0, \ dots & & & dots \ frac frac+ & frac frac+ &dots + frac frac & equiv 0; end right. $$ здесь после вычисления производных $ $ следует произвести подстановку $ y_1=f_1(X),dots,y_n=f_n(X) $. Получившуюся систему можно рассматривать как линейную однородную относительно этих последних выражений. Хотя бы одна из них не должна быть тождественно нулевой (в противном случае функция $ G $ не содержала бы ни одной функции $ f_j $). Но тогда для совместности системы необходимо, чтобы ее определитель был равен нулю. Этот определитель, с точностью до транспонирования, совпадает с якобианом.
Пример. Являются ли полиномы
$$ f_1=x_1+x_2+x_3-1,quad f_2=x_1x_2+x_1x_3+x_2x_3-2,quad f_3=x_1^2+x_2^2+x_3^2+3 $$ функционально зависимыми?
Решение. $$ frac= $$ $$ = left| begin 1 & 1 & 1 \ x_2+x_3 & x_1+x_3 & x_1+x_2 \ 2x_1 & 2x_2 & 2x_3 end right| = 2 left| begin 1 & 1 & 1 \ x_2+x_3 & x_1+x_3 & x_1+x_2 \ x_1 & x_2 & x_3 end right|= $$ $$ = left| begin 1 & 1 & 1 \ x_1+x_2+x_3 & x_1+x_2+x_3 & x_1+x_2+x_3 \ x_1 & x_2 & x_3 end right|equiv 0 $$ (мы воспользовались здесь свойствами 4 и 5 определителя, выписанными ☞ ЗДЕСЬ ). Ответ оказывается положительным: рассматриваемые полиномы являются функционально зависимыми. В данном примере эта зависимость сравнительно просто «отлавливается» наметанным взглядом: $$(f_1+1)^2-2(f_2+2)-(f_3-3) equiv 0 . $$ ♦
Если какие-то $ mathfrak r $ функций системы $ < f_, dots, f_n > $ связаны в $ mathbb $ функциональным соотношением
$$ H(f_, dots, f_<j_>) equiv 0 , $$ то любой минор порядка $ mathfrak r $ якобиана, выбранный из соответствующих строк, будет тождественно равен нулю в $ mathbb_ $.
Пусть $ mathfrak r_ $ обозначает ранг матрицы Якоби системы функций $ <f_1,dots,f_> $ по переменным $ x_,dots,x_n $. Если минор этой матрицы
$$ frac<D(f_1,dots,f_)> $$ отличен от нуля в $ mathbb_ $, то функции $ f_1,dots,f_ $ функционально независимы в $ mathbb $, а все оставшиеся функции системы (при условии $ mathfrak r непрерывная функция $ varphi (y) $ такая, что $$ f(varphi(y)) equiv y, varphi(y_0)=x_0 , . $$ В этой окрестности функция $ varphi $ является непрерывно дифференцируемой и выполняется равенство $$ varphi^ (y) = frac <f^(x)> $$ для значений $ x $ и $ y $, связанных равенством $ y=f(x) $.
Конструктивных аналитических способов нахождения функции, обратной к заданной $ y=f(x) $ можно сказать, что и нет. Задача сводится к разрешению этого уравнения относительно $ x $. Однако уже для полиномиальных $ f(x) $ решение такого уравнения в «хороших» функциях, т.е. в радикалах, возможно, в общем случае, только для $ deg f ♦
В альтернативу интерполяции, можно поставить задачу об аппроксимации обратной функции с помощью степенных рядов. Составим формальный ряд $$ varphi(y)=B_0+B_1(y-y_0) + B_2(y-y_0)^2+ dots + B_k(y-y_0)^k+ dots $$ Для значения $ y_0 $ из теоремы получаем два коэффициента этого ряда $$ B_0=x_0, B_1= 1/f^ (x_0) , . $$ Как получить следующий коэффициент $ B_2 $? Заметим, что если бы у обратной функции существовала бы вторая производная, то $ B_2 $ был бы следующим коэффициентом ряда Тейлора: $$ B_2 = varphi^(y_0)/2 , . $$ Для получения выражения $ varphi^(y_0) $ продифференцируем по $ y $ тождество $ f(varphi(y)) equiv y $. Тождество останется справедливым $$ f^_x(varphi(y)) varphi^_y(y)equiv 1 , . $$ При подстановке сюда $ y=y_0 $ получаем уже известное нам равенство $ f^_x(x_0)varphi^_y(y_0)=1 $. Но если продифференцировать еще раз, то получим $$ f^_(varphi(y)) left(varphi^_y(y)right)^2+f^_x(varphi(y)) varphi^_(y)equiv 0 , . $$ При подстановке сюда $ y=y_0 $ получаем $$ varphi^_(y_0)=- frac<f^_(x_0)><[f^_x(x_0)]^3> $$ в дополнительном предположении, что вторая производная от $ f(x) $ существует. Вычисление остальных старших производных $ varphi(y) $ в точке $ y_0 $ производится аналогичным приемом — лишь бы только существовали эти производные для функции $ f(x) $. $$ varphi^_(y_0)= frac<3,[f^_(x_0)]^2- f^_x(x_0)f^_(x_0) ><[f^_x(x_0)]^5> , $$ $$ varphi^_(y_0)= $$ А для выведения общей формулы $ varphi^_(y_0) $ используется формула Фаа-ди-Бруно. При полиномиальной $ f(x) $ ряд Тейлора для обратной функции всегда может быть построен.
Пример. Для функции $ y=-x^3+3,x-1 $ приведенного выше примера первые $ 8 $ членов разложение обратной функции в ряд Тейлора в точке $ y_0=-1 $ имеют вид
$$ widehat(y)= frac(y+1)+frac(y+1)^3+frac(y+1)^5 +frac(y+1)^7 , . $$ На графике внизу кривая $ y = widehat(x)$ изображена цветом охры.

И только близко к точке $ x=1 $ заметно расхождение с $ y= varphi(x) $. ♦
Теорема утверждает, что обратная функция будет определена в окрестности точки $ y_0 $, удовлетворяющей условию. Насколько большой можно сделать эту окрестность? Ограничимся случаем полиномиальных $ f(x) $. При движении от точки $ y_0 $ вправо или влево по числовой оси значения $ varphi^(y) $ меняются непрерывным образом и стремятся к бесконечности только когда соответствующие значения $ x $ стремятся к корням полинома $ f^(x) $. Если этот полином имеет вещественные корни, и $ mu_1 непрерывные функции $ varphi(u,v) $ и $ psi(u,v) $ такие, что $$ f(varphi(u,v),psi(u,v)) equiv u, g(varphi(u,v),psi(u,v)) equiv v, varphi(u_0,v_0)=x_0, psi(u_0,v_0)=x_0 , . $$ Функции $ varphi $ и $ psi $ непрерывно дифференцируемы в этой окрестности, и для их матрицы Якоби выполняется равенство $$ left(begin partial varphi/ partial u & partial varphi/ partial v \ partial psi/ partial u & partial psi/ partial v end right)= left(begin partial f/ partial x & partial f/ partial y \ partial g/ partial x & partial g/ partial y end right)^ , . $$ Левая часть этого матричного равенства вычисляется в точках $ (u,v) $, соответствующих точкам $(x,y) $, в которых вычисляется правая часть (т.е. эти пары подчиняются равенствам $ u=f(x,y),v=g(x,y) $).
Отображение окрестности точки $ (u_0,v_0) $ в окрестность точки $ (x_0,y_0) $, заданное векторной функцией $ (varphi(u,v), psi(u,v)) $ из теоремы, называется обратным отображением к отображению $ (f(x,y),g(x,y)) $.
При выполнении условий теоремы, в соответствующих друг другу точках $ (u,v) $ и $ (x,y) $ выполняется равенство
Пример. Отображение
$$ (e^x cos y, e^x sin y > $$ отображает $ (x,y) $-плоскость $ mathbb R^2 $ во множество $ mathbb R^2 setminus (0,0) $ на плоскости $ (u,v) $. Якобиан $$ frac equiv e^ $$ отличен от нуля во всей плоскости $ (x,y) $. Можно было бы ожидать, что обратное отображение однозначно определено во всей области $ mathbb R^2 setminus (0,0) $. Но очевидно, что это не так: бесконечное множество $$ $$ отображается в точку $ (u,v)=(1,0) $. Обратное отображение бесконечнозначно. Результат теоремы справедлив если мы рассмотрим отображение любой полосы шириной $ 2 pi $ плоскости $(x,y) $, параллельной оси $ O x $. Например, полосы $ 0le y ♦
Мы в дальнейшем ограничимся случаем полиномиальных функций. Для этого случая хотя бы можно ожидать, что якобиан будет из того же класса, что и сами функции, т.е. полиномом. Ну и можно что-то конструктивное сказать о представлении обратных отображений — хотя они уже, как правило, не будут полиномиальными, но задачу их представления можно свести к одномерному случаю.
Пример. Найти обратное отображение к отображению
Решение. Якобиан $$ frac=left| begin -4,x+5,y-2 & 5,x-6,y+1 \ 2,x-2,y-1 & -2,x+2,y+1 end right|=-2,x^2+4,xy-2,y^2+3,x -3,y-1equiv $$ $$ equiv (-2x+2y+1)(x-y-1) , . $$ отличен от нуля во всех точках плоскости, за исключением лежащих на прямых $ y=x-1 $ и $ y=x-1/2 $. Согласно теореме, обратное отображение должно существовать, например, в окрестности точки $ (u,v)=(-5,7)=(f(-1,1),g(-1,1)) $.
Для разрешения системы алгебраических уравнений $ u=f(x,y), v=g(x,y) $ относительно $ x $ и $ y $ применим теорию исключения. Результант системы по переменной $ y $ $$ mathcal X(x)=(1-v)x^2+(u+11,v-9)x+u^2-6,u-34,v+9,v^2+6,uv+21 $$ оказывается квадратным полиномом 1) по $ x $. Корни уравнения $ mathcal X(x) =0$ следующие: $$ frac<u+11v-9pm (u+3v-1)sqrt> , . $$ Из них только соответствующий знаку минус в числителе, т.е. $$ varphi(u,v):=frac<u+11v-9 — (u+3v-1)sqrt> $$ удовлетворяет условию $ varphi(-5,7)=-1 $. Аналогично находим выражение для $ y $: $$ psi(u,v):=frac<u+10v-8 — (u+2v)sqrt> , . $$ Области определения обеих функций одинаковы: $$ , . $$ Теперь проверим справедливость формулы, связывающей якобианы. Имеем (в окрестности точки $ (-5,7) $) $$ frac= frac<2(1-v)sqrt>left[sqrt-1 right] , . $$ Подстановка сюда $ u=f(x,y), v= g(x,y) $ дает (в окрестности точки $ (1,-1) $) $$ frac equiv left( frac right)^ , . $$ ♦
Сформулируем обобщение предыдущего результата в $ mathbb R^n $.
Теорема. Если якобиан системы полиномов
$$ subset mathbb R[X] $$ отличен от нуля в некоторой точке $ X_0 in mathbb R^n $, то существует окрестность этой точки, в которой система уравнений $$ y_1=f_1(x_1,dots,x_n),dots,y_n=f_n(x_1,dots,x_n) , $$ рассматриваемая относительно переменных $ x_,dots,x_n $, имеет единственное решение, лежащее в окрестности точки $$ Y_0=(f_1(X_0), dots , f_n(X_0)) , . $$ Иными словами: существует и однохначно определяется система непрерывных в окрестности точки $ Y_0 $ функций $$ , $$ таких, что $$ f_1(varphi_1(Y),dots, varphi_n(Y))equiv y_1,dots, f_n(varphi_1(Y),dots, varphi_n(Y))equiv y_n $$ и $$ (varphi_1(Y_0),dots, varphi_n(Y_0))=X_0 , .$$ Функции $ _^n $ непрерывно дифференцируемы в указанной окрестности. Матрицы Якоби систем функций $ _^n$ и $ _^n$ связаны равенством: $$ left( begin / & / & dots & / \ dots & && dots \ / & / & dots & / end right)= left( begin / & / & dots & / \ dots & && dots \ / & / & dots & / end right)^ , . $$ Здесь производные в левых и правых частях равенства вычислены в соответствующих точках.
При выполнении условий теоремы, в соответствующих друг другу точках $ Y $ и $ X $ выполняется равенство
Видео:Матричный метод решения систем уравненийСкачать
Якобиан как коэффициент растяжения
Еще одну важную сущность якобиана сформулируем в решении следующего примера.
Пример. Отображение
$$ left< begin u=f(x,y):=&-1/2,x^2-3/4,xy-y^2-x-1/2,y+2,\ v=g(x,y):=& 1/4,x^2-1/2,xy-1/2,y^2-x+1/2,y+1 end right. $$ отображает окрестность точки $ (x_0,y_0)=(0,1) $ в окрестность точки $ (u_0,v_0)=(1/2,1) $. Квадрат $ 0 le x le 1, 0 le y le 1$ отображается в область плоскости $ (u,v) $, органиченную параметрически заданными кривыми $$ , , $$ $$ , . $$  Как соотносятся между собой площади двух областей: исходного квадрата и его образа?
Как соотносятся между собой площади двух областей: исходного квадрата и его образа?
Решение. Для ответа на вопрос надо обладать возможностью вычислить точную площадь области, закрашенной оранжевым на рисунке. Я не уверен, что это можно сделать сведением к случаю «табличных» интегралов, но, по крайней мере, численными методами можно найти приближение этой площади. Попробуем получить такое приближение, заменив границу области — криволинейную — на параллелограмм. С этой целью проведем в точке $ (u_0,v_0) $ касательные к ограничивающую область кривым: $$ < (u,v)= (u_0+ f^_x(x_0,y_0) t, v_0+ g^_x(x_0,y_0) t) mid t in mathbb R > mbox < (u,v)=(u_0+ f^_y(x_0,y_0) tau, v_0+ g^_y(x_0,y_0) tau )mid tau in mathbb R > , . $$  и возьмем на них, помимо $ (u_0,v_0) $, точки, соответствующие значениям параметров $ t=1, tau=1 $.
и возьмем на них, помимо $ (u_0,v_0) $, точки, соответствующие значениям параметров $ t=1, tau=1 $.
Эта аппроксимация, в нашем конкретном случае, очевидно неудачная. Как следствие, площадь получишегося параллелограмма визуально отличается от искомой площади.  Однако если уменьшить размеры отображаемого квадрата на плоскости $ (x,y) $ до $ 0 le x le 1/2, 1/2le y le 1 $, то его образ
Однако если уменьшить размеры отображаемого квадрата на плоскости $ (x,y) $ до $ 0 le x le 1/2, 1/2le y le 1 $, то его образ  становится более похожим на параллелограмм
становится более похожим на параллелограмм  построенный по приведенному выше образцу. В общем случае отображения квадрата размера $ delta times delta $ получаем приближение его образа в виде параллелограмма с вершинами $$ (u_0,v_0), (u_0+f^_x delta,v_0 +g^_x delta), (u_0+f^_y delta,v_0 +g^_y delta) , , $$ $$ (u_0+f^_x delta++f^_y delta,v_0 +g^_x delta+g^_y delta) , . $$ Здесь все производные вычислены в точке $ (x_0,y_0) $. Воспользовавшись формулой вычисления площади параллелограмма, получаем выражение в виде абсолютной величины (модуля) выражения $$ left|begin f^_x & g^_x \ f^_y & g^_y end right| delta^2 , . $$ Чем меньше $ delta $ тем меньше отклонение этого приближения от образа квадрата при отображении. Если изображать образы точек под воздействием отображения на той же исходной плоскости, то можно сказать, что абсолютная величина якобиана представляет собой коэффициент сжатия (или растяжения) бесконечно малой области вокруг точки, в которой он вычисляется. В настоящем примере $$ frac Bigg|_= — frac , $$ т.е. малая окрестность точки $ (0,1) $ «резиновой» плоскости сдвинется к точке $ (1,-1) $ и растянется примерно в четыре раза. ♦
построенный по приведенному выше образцу. В общем случае отображения квадрата размера $ delta times delta $ получаем приближение его образа в виде параллелограмма с вершинами $$ (u_0,v_0), (u_0+f^_x delta,v_0 +g^_x delta), (u_0+f^_y delta,v_0 +g^_y delta) , , $$ $$ (u_0+f^_x delta++f^_y delta,v_0 +g^_x delta+g^_y delta) , . $$ Здесь все производные вычислены в точке $ (x_0,y_0) $. Воспользовавшись формулой вычисления площади параллелограмма, получаем выражение в виде абсолютной величины (модуля) выражения $$ left|begin f^_x & g^_x \ f^_y & g^_y end right| delta^2 , . $$ Чем меньше $ delta $ тем меньше отклонение этого приближения от образа квадрата при отображении. Если изображать образы точек под воздействием отображения на той же исходной плоскости, то можно сказать, что абсолютная величина якобиана представляет собой коэффициент сжатия (или растяжения) бесконечно малой области вокруг точки, в которой он вычисляется. В настоящем примере $$ frac Bigg|_= — frac , $$ т.е. малая окрестность точки $ (0,1) $ «резиновой» плоскости сдвинется к точке $ (1,-1) $ и растянется примерно в четыре раза. ♦
Видео:А.7.40 Метод Якоби поиска собственных векторов и значений симметричных матрицСкачать

Неявная функция
Обобщением рассмотренного в предыдущем пункте случая, т.е. выражения вектора $ X=(x_1,dots,x_n) $ через вектор $ Y=(y_1,dots,y_n) $ при задании многомерного отображения формулами $$ Y= (f_1(X),dots,f_n(X)) $$ является случай неявной функции.
В линейном случае, эта задача встречается при записи общего решения системы линейных уравнений. Если эта система представлена в виде $$ left< begin a_y_1 &+a_y_2&+ ldots&+a_y_n &+a_x_&+ldots & +a_x_ -b_1=0,\ a_y_1 &+a_y_2&+ ldots&+a_y_n &+a_x_&+ldots & +a_x_ -b_2=0,\ dots & & & & dots & dots & & dots \ a_y_1 &+a_y_2&+ ldots&+a_y_n &+a_x_&+ldots & +a_x_ -b_n=0 end right. $$ при $ mge 1 $, то при условии $$ left| begin a_ & a_ & dots & a_ \ a_ & a_ & dots & a_ \ dots &&& dots \ a_ & a_ & dots & a_ end right| ne 0 $$ ее можно разрешить относительно переменных $ y_1,dots,y_n $ — например, по формулам Крамера или посредством обратной матрицы: $$ left( begin y_ \ y_ \ vdots \ y_ end right) = — left( begin a_ & a_ & dots & a_ \ a_ & a_ & dots & a_ \ dots &&& dots \ a_ & a_ & dots & a_ end right)^ left( begin a_ & dots & a_ \ a_ & dots & a_ \ dots && dots \ a_ & dots & a_ end right) left( begin x_ \ \ vdots \ x_ end right)+left( begin a_ & a_ & dots & a_ \ a_ & a_ & dots & a_ \ dots &&& dots \ a_ & a_ & dots & a_ end right)^ left( begin b_ \ \ vdots \ b_ end right) , . $$
В случае нелинейного уравнения $$ f(x,y)=0 , $$ критерий существования неявной функции дается следующей теоремой
Теорема 1 [о неявной функции]. Пусть функция $ f $ — непрерывно дифференцируема в окрестности точки $ (x_0,y_0) $ и
$$ f(x_0,y_0)=0 , partial f /partial y mid_ne 0 , .$$ Тогда существует окрестность точки $ x_0 $, в которой уравнение $ f(x,y)=0 $ имеет единственное вещественное решение относительно $ y $, лежащее в окрестности $ y_0 $. Иными словами: существует вещественная непрерывная функция $ varphi(x) $, такая, что $$ varphi(x_0)=y_0, f(x,varphi(x)) equiv 0 $$ (последнее тождество выполняется в заявленной окрестности $ x_0 $). При этом $ varphi(x) $ является непрерывно дифференцируемой функцией в той же окрестности и выполняется тождество $$ varphi^(x)equiv-frac Bigg|_<_> , . $$
Нахождение явного выражения для $ y=varphi(x) $ является задачей еще более сложной, чем задача предыдущего пункта о нахождении обратной функции. Усложнение проявляется уже в проблеме поиска хотя бы одной точки $ (x_0,y_0) in mathbb R^2 $, удовлетворяющей уравнению $ f(x,y)=0 $. Проблема существования вещественного решения этого уравнения даже для случая полиномиальной функции $ f $ нетривиальна: см. пункт ☞ АЛГЕБРАИЧЕСКИЕ УРАВНЕНИЯ. Если вещественное решение удастся обнаружить, то нахождение неявной функции можно осуществить построением ряда Тейлора (или, в общем случае, при нарушении условия теоремы, в виде ряда Пюизё), сходящегося в некоторой окрестности точки $ x_0 $.
Результат теоремы $ 1 $ очевидным образом обобщается на случай неявной функции нескольких переменных: уравнение $$ f(x_1,dots,x_n, y) = 0 quad mbox n ge 2 $$ пытаются разрешить относительно $ y $.
Более общую задачу решения системы уравнений относительно нескольких переменных мы рассмотрим в частном случае уравнений алгебраических.
Теорема 2. Пусть имеется система полиномов
$$ subset mathbb R[X,Y], m ge 2 $$ от векторов переменных $ X=(x_1,dots,x_n) $ и $ Y=(y_1,dots,y_m) $. Пусть выполнены следующие условия:
$$ f_1(X_0,Y_0)=0, dots , f_m(X_0,Y_0)=0 , . $$
Рассмотрим сначала самый простой случай: $$ f(x,y,z)=0, g(x,y,z)=0 , . $$ Будем предполагать, что каждое из уравнений задает некоторую поверхность в $ mathbb R^3 $. Две неявно заданные алгебраические поверхности в $ mathbb R^3 $ могут не иметь вещественных точек пересечения. Как установить существование точек пересечения, т.е. наличие вещественных решений системы уравнений? Для полиномимальных $ f $ и $ g $ этот факт можно установить алгебраическими методами, которые проиллюстрирую на примере.
Пример. Пусть заданы две квадрики
$$ f(x,y,z):=frac9+frac-frac-1=0, $$ $$ g(x,y,z):= 111376, x^2-14656, xy+72128, xz+45184, y^2-45184, yz+76096, z^2+ $$ $$ +92136, x-118608, y+205104, z-1913751=0 $$ Первая является однополостным гиперболоидом, а вторая — эллипсоидом. Эти поверхности пересекаются по двум замкнутым кривым $ mathbf K_1 $ и $ mathbf K_2 $. На одной из них выбираем произвольную точку, например $$ (x_0,y_o,z_0) approx (1.959148, 3.864766, 3) , . $$

Отложив на несколько последующих абзацев ответ на вопрос, как эти координаты найдены, займемся задачей нахождения касательной к кривой $ mathbf K_1 $ в указанной точке.
Докажем, что в окрестности точки кривую $ mathbf K_1 $ можно представить параметрически $$ x=varphi_1 (z), y= varphi_2 (z), z= z , . $$ Действительно, матрица Якоби $$ mathbf J=left(begin 2/9 x & 1/6 y \ 222752, x-14656, y+72128, z + 92136 & -14656, x+90368, y-45184, z-118608 end right) $$ имеет ненулевой определитель в точке $ (x_0,y_o,z_0) $. В соответствии с теоремой 2, параметрическое представление кривой существует в некоторой окрестности точки $ z_0 $. Явное выражение для функций $ varphi_1, varphi_2 $ — отдельная нетривиальная проблема, но для поставленной конкретной задачи поиска касательной решение этой проблемы не требуется. Действительно, теорема 2 дает представление $$ (varphi_1^(z_0), varphi_2^(z_0),1) approx (-1.052314,1.445142,1) $$ для направляющего вектора касательной в виде явного выражения через значения функций $ f $ и $ g $ (и их производных) в точке $ (x_0,y_0,z_0) $.
А теперь проверим полученный результат альтернативным алгоритмом, задействовав технологию исключения переменных (которую мы уже использовали в предыдущем ПУНКТЕ). Cоставив результант полиномов $ f $ и $ g $ по переменной $ y $, придем к уравнению $$ F(x,z)=0 $$ при $$ F(x,z):=mathcal R_y(f,g)= $$ $$ =fracx^4+fracx^3z+fracx^2z^2+frac,xz^3+fracz^4+ $$ $$ +frac x^3+frac x^2 z+frac x z^2+frac z^3- $$ $$ -fracx^2-fracxz-fracz^2-fracx-fracz+frac , . $$ Имеем: $ deg_x F=4 $, т.е. уравнение $ F(x,z)=0 $ разрешимо в радикалах относительно $ x $. По крайней мере, теоретически, функцию $ varphi_1(z) $ можно представить в виде конечной комбинации элементарных функций и корней второй и третьей степеней от коэффициентов полинома. Реальное же представление для $ varphi_1(z) $ крайне громоздко и, с точки зрения практического использования, неконструктивно.
Уравнение четвертой степени может иметь от нуля до четырех вещественных корней в зависимости от значений $ z $. При подстановке конкретного значения $z =z_0 in mathbb R $ получаем полином $ F(x,z_0) $ от одной переменной $ x $. Мы можем однозначно и чисто алгебраическим алгоритмом установить число его вещественных корней. Так, $$ F(x,3)equiv fracx^4+126573205 x^3+fracx^2+fracx-frac $$ имеет два вещественных корня $ approx -3.309237 $ и $ approx 1.959148 $. Второй из них мы и взяли выше в качестве $ x_0 $. Таким образом, для $ varphi_1(z) $ мы получили представление в виде неявной функции $ F(x,z)=0 $ при заданном значении $ varphi_1(z_0)=x_0 $. Но тогда для этой функции должна работать теорема 1, которая дает представление $$ varphi_1^(z_0)= -frac Bigg|_<_> , . $$ Результат совпадает с полученным выше.
Понятно, что для получения $ varphi_2(z) $ мы должны произвести процедуру исключения переменной $ x $ из системы $ f=0,g=0 $, т.е. вычислить результант $ G(y,z):=mathcal R_x(f,g) $. Далее найти корень полинома $ G(y,z_0) $ (выбрав тот из них, что соответствует уже найденном у значению $ x_0 $) и т.д. Убеждаемся, что $$ varphi_2^(z_0)= -frac Bigg|_<_> , . $$
Вопроc: какая же связь между матрицей Якоби и результантами $ mathcal R_x(f,g), mathcal R_y(f,g) $ приводит — в результате применения двух различных алгоритмов — к совершенно разным представлениям для $ varphi_1^(z_0), varphi_2^(z_0) $, имеющим, тем не менее, одинаковые значения? ♦
Если система полиномов
$$ $$ удовлетворяет условиям теоремы в некоторой точке $ (X_0,Y_0) in mathbb R^ $, то существует окрестность точки $ X_0 $, в которой справедливо равенство $$ frac=(-1)^n frac bigg/ frac , . $$ Здесь производные вычислены в соответствующих точках.
Видео:ИМРС 5.7 Матрица Якоби (Якобиан)Скачать

Геометрические приложения
Теорема. Пусть на плоскости заданы две кривые уравнениями
$$ f(x,y)=0 quad u quad g(x,y)=0 $$ и они пересекаются в точке $ (x_,y_0) $. Тогда величина угла $ gamma $, под которым происходит это пересечение вычисляется по формуле $$ operatorname (gamma) = pm frac<frac frac — frac frac><frac frac + fracfrac> $$ где все производные в правой части вычислены в точке $ (x_,y_0) $.
Утверждение следует из свойства градиента: вычисленный в точке кривой, он определяет направляющий вектор нормали к этой кривой.
Если $ (x_,y_0) $ — точка пересечения кривых $ f(x,y)=0 $ и $ g(x,y)=0 $, то
Показать, что если функции $ u_(x,y) $ и $ v_(x,y) $ связаны соотношениями Коши-Римана (Даламбера-Эйлера):
$$ frac equiv frac , frac equiv — frac $$ в некоторой области $ mathbb_ $, то в этой области их линии уровня, то есть кривые $ u(x,y) = c_1 $ и $ v(x,y) = c_2 $ при $ subset mathbb R $, могут пересекаться только под прямым углом.
Видео:Метод простой итерации Пример РешенияСкачать

Решение системы нелинейных уравнений
Рассмотрим систему двух вещественных алгебраических уравнений $$ f(x,y)=0, g(x,y)=0 , . $$ По аналогии с методом Ньютона решения уравнения от одной неизвестной, попробуем найти вещественное решение этой системы, сгенерировав итерационную последовательность в $ mathbb R^2 $, сходящуюся к этому решению. Допустим, что из каких-то соображений нам удалось установить, что вещественное решение системы существует, и что некоторая точка $ (x_0, y_0) $ достаточно близка к этому решению. Раскладываем полиномы по формуле Тейлора по степеням $ x-x_0, y-y_0 $ и оставляем в этих разложениях только первые слагаемые: $$ f(x,y)equiv f(x_0,y_0)+ fracBigg|_(x-x_0)+fracBigg|_(y-y_0) + dots , , $$ $$ g(x,y)equiv g(x_0,y_0)+ fracBigg|_(x-x_0)+fracBigg|_(y-y_0) + dots , . $$ Теперь вместо системы нелинейных уравнений рассматриваем систему $$ left< begin f(x_0,y_0)&+ fracBigg|_(x-x_0)+fracBigg|_(y-y_0) &= 0,\ g(x_0,y_0)&+ fracBigg|_(x-x_0)+fracBigg|_(y-y_0) &= 0 end right. $$ линейных уравнений. Она гарантировано имеет решение если матрица $$ mathbf J= left( begin partial f /partial x & partial f /partial y \ partial g /partial x & partial g /partial y end right) $$ будет неособенной при $ x=x_0,y=y_0 $. При этом предположении решение системы единственно и может быть выражено в виде $$ left( begin x_1 \ y_1 end right)= left( begin x_0 \ y_0 end right) — mathbf J^ left( begin f(x_0,y_0) \ g(x_0,y_0) end right) , . $$ Получаем полную аналогию с одномерным методом Ньютона; роль производной теперь выполняет матрица Якоби. Можно ожидать, что точка $ (x_1,y_1) $ будет лежать ближе к неизвестному нам решению исходной системы, нежели стартовая точка $ (x_0, y_0 ) $. Если это предположение выполняется, то можно попытаться организовать вычисление итерационной последовательности $$ left< left( begin x_j \ y_j end right)= left( begin x_ \ y_ end right) — mathbf J^ Bigg|_<_<(x_,y_)>> left( begin f(x_,y_) \ g(x_,y_) end right) right>_^ $$ и потестировать ее на сходимость к решению. Одно ограничение для этого умозаключения довольно очевидно: матрица Якоби должна быть невырожденной на всех итерациях (а, желательно, и не очень близкой к вырожденным матрицам).
Подробнее о методе Ньютона решения систем нелинейных уравнений ☞ ЗДЕСЬ.
Видео:Математика без Ху!ни. Метод Гаусса.Скачать

13.3 Матрица Якоби
Рассмотрим отображение $f : E longmapsto R^m,$ где $E subset R^n.$ Оно состоит из $m$ функций: $f = left(f_1 left(x_1,ldots,x_n right),f_2 left(x_1,ldots,x_n right),ldots,f_m left(x_1,ldots,x_n right) right),$ которые осуществляют отображение множества $E$ из $R^n$ в пространство $R^m.$
Предположим, что функции $f_k left(x_1,ldots,x_n right),$ где $k = overline,$ дифференцируемы, то есть имеют частные производные по аргументам $(x_1,ldots,x_n):$
Составим матрицу из этих частных производных по переменным $x_1,ldots,x_n$
Такая матрица называется матрицей Якоби.
Если $m = n,$ то получаем квадратную матрицу, определитель которой называется определителем Якоби или якобианом $Jf(x)$ и обозначается
Замечание. Если все частные производные непрерывны, то и сам оределитель Якоби является непрерывной функцией.
Теорема. Якобиан тождественно равен нулю в некоторой области $mathbb$:
тогда и только тогда, когда между функциями $f_1,f_2,ldots,f_n$ имеется функциональная зависимость в $mathbb,$ то есть существует функция $G left(y_1,y_2,ldots,y_n right) not equiv 0$ такая, что
$G left(f_1(x),f_2(x),ldots,f_n(x) right) equiv 0$ при всех $x = (x_1, ldots, x_n) in mathbb.$
Пример 1. Являются ли функции функционально зависимыми?
begin f_1 = x_1 + x_2 + x_3 -1; \ f_2 = x_1x_2 + x_1x_3 + x_2x_3 -2; \ f_3 = x^2_1 + x^2_2 + x^2_3 + 3. end
$frac = begin \ 1 & 1 & 1 \ x_2 + x_3 & x_1 + x_3 & x_1 + x_2 \ 2x_1 & 2x_2 & 2x_3 end = $
$=begin \ 1 & 1 & 1 \ x_1 + x_2 + x_3 & x_1 + x_2 + x_3 & x_1 + x_2 + x_3 \ 2x_1 & 2x_2 & 2x_3 end equiv 0$
Так как якобиан равен нулю, то эти функции функционально зависимы. Несложно найти эту зависимость:
$left(f_1 + 1 right)^2 -2left(f_2 + 2 right) -left(f_3 -3right) = 0.$
Пример 2. Для линейных функций $f_1 = a_ x_1 + ldots + a_ x_n -b_1, ldots , f_m = a_ x_1 + a_ x_n -b_m$ матрица Якоби будет матрицей коэффициентов при переменных:
begin a_ & a_ & ldots & a_ \ ldots & ldots & ldots & ldots \ a_ & a_ & ldots & a_ end
Если мы хотим разрешить систему $f_1 = 0,f_2 = 0, ldots, f_n = 0$ относительно $x_1, ldots, x_n,$ то для случая $m = n$ определитель Якоби
begin a_ & ldots & a_ \ ldots & ldots & ldots \ a_ & ldots & a_end
есть определитель системы и для её разрешимости он должен быть отличен от нуля.
Пример 3. Переход элементарной площади $dS = dx,dy$ от декартовых координат $ left( x,y right)$ к полярным координатам $ left( r,phi right)$:
Матрица Якоби имеет вид:
$$J(r,phi) = begin frac & frac \ frac & frac end = begin cos(phi) & -r,sin(phi) \ sin(phi) & r,cos(phi) end.$$
Якобиан перехода от декартовых координат к полярным есть определитель матрицы Якоби:
$J(r,phi) = det I(r,phi) = detbegin cos(phi) & -r,sin(phi) \ sin(phi) & r,cos(phi) end.$
Таким образом, элемент площади при переходе от декартовых к полярным координатам будет выглядеть следующим образом:
$dS = dx,dy = Jleft(r,phi right) dr,dphi = r,dr,dphi.$
Пример 4. Переход элементарного объёма $dV$=$dx$ $dy$ $dz$ от декартовых координат $left(x,y,z right)$ к сферическим координатам $left(r,theta,phi right)$ :
$beginx = r,sin(theta),cos(phi); \ y = r,sin(theta),sin(phi); \ z = r,cos(theta).end$
$= begin sin(theta) cos(phi) & r,cos(theta) cos(phi) & -r,sin(theta),sin(phi) \ sin(theta),sin(phi) & r,cos(theta),sin(phi) & r,sin(theta),cos(phi) \ cos(theta) & -r,sin(theta) & 0 end.$
А якобиан перехода от декартовых координат к сферическим – есть определитель матрицы Якоби:
$Jleft(r,theta,phi right) = det Ileft(r,theta,phi right)$ =
= $begin sin(theta),cos(phi) & r,cos(theta),cos(phi) & -r,sin(theta),sin(phi) \ sin(theta),sin(phi) & r,cos(theta),sin(phi) & r,sin(theta), cos(phi) \ cos(theta) & -r,sin(theta) & 0 end = r^2sin(theta).$
Таким образом, элемент объёма при переходе от декартовых к сферическим координатам будет выглядеть следующим образом:
$dV = dx,dy,dz = Jleft(r,theta,phi right) dr,dtheta,dphi = r^2,sin(theta),dr,dtheta ,dphi.$
Видео:Системы дифференциальных уравнений. Часть 2Скачать

Системы дифференциальных уравнений с примерами решения и образцами выполнения
Также как и обыкновенные дифференциальные уравнения, системы дифференциальных уравнений применяются для описания многих процессов реальной действительности. В частности, к ним относятся различного рода физические и химические процессы, процессы нефте- и газодобычи, геологии, экономики и т.д. Действительно, если некоторые физические величины (перемещение тела, пластовое давление жидкости в фиксированной точке с тремя координатами, концентрация веществ, объемы продаж продуктов) оказываются меняющимися со временем под воздействием тех или иных факторов, то, как правило, закон их изменения по времени описывается именно системой дифференциальных уравнений, т.е. системой, связывающей исходные переменные как функции времени и производные этих функций. Независимой переменной в системе дифференциальных уравнений может выступать не только время, но и другие физические величины: координата, цена продукта и т.д.

Видео:Система дифференциальных уравнений. Операционный методСкачать

Решение систем дифференциальных уравнений
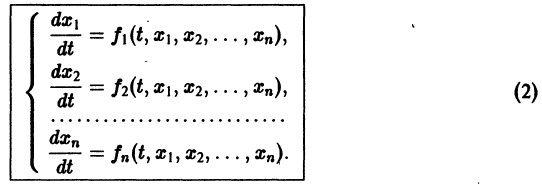
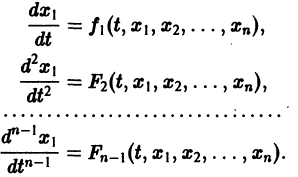
К системе дифференциальных уравнений приводит уже простейшая задача динамики точки: даны силы, действующие на материальную точку; найти закон движения, т. е. найти функции  выражающие зависимость координат движущейся точки от времени. Система, которая при этом получается, в общем случае имеет вид
выражающие зависимость координат движущейся точки от времени. Система, которая при этом получается, в общем случае имеет вид
Здесь x, у, z — координаты движущейся точки, t — время, f, g, h — известные функции своих аргументов.
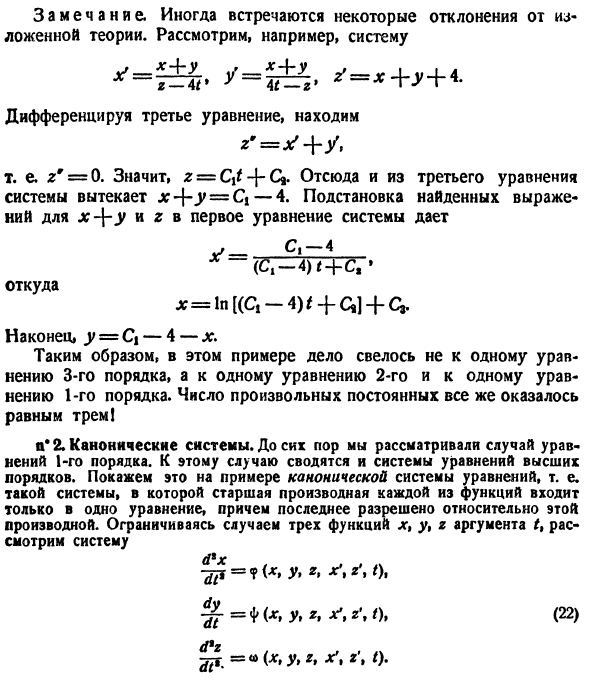
Система вида (1) называется канонической. Обращаясь к общему случаю системы т дифференциальных уравнений с т неизвестными функциями  аргумента t, назовем канонической систему вида
аргумента t, назовем канонической систему вида

разрешенную относительно старших производных. Система уравнений первого порядка, разрешенных относительно производных от искомых функций,

Если  в (2) принять за новые вспомогательные функции, то общую каноническую систему (2) можно заменить эквивалентной ей нормальной системой, состоящей из
в (2) принять за новые вспомогательные функции, то общую каноническую систему (2) можно заменить эквивалентной ей нормальной системой, состоящей из  уравнений. Поэтому достаточно рассматривать лишь нормальные системы.
уравнений. Поэтому достаточно рассматривать лишь нормальные системы.
Например, одно уравнение
является мастным случаем канонической системы. Положив  в силу исходного уравнения будем иметь
в силу исходного уравнения будем иметь

В результате получаем нормальную систему уравнений

эквивалентную исходному уравнению.
Определение:
Решением нормальной системы (3) на интервале (а, Ь) изменения аргумента t называется всякая система n функций

дифференцируемых на интервале а 
Теорема:
Существования и единственности решения задачи Коши. Пусть имеем нормальную систему дифференциальных уравнений

и пусть функции  определены в некоторой (n + 1) — мерной области D изменения переменных
определены в некоторой (n + 1) — мерной области D изменения переменных  Если существует окрестность
Если существует окрестность  точки
точки  в которой функции fi непрерывны по совокупности аргументов и имеют ограниченные частные производные по переменным
в которой функции fi непрерывны по совокупности аргументов и имеют ограниченные частные производные по переменным  то найдется интервал
то найдется интервал  изменения t, на котором существует единственное решение нормальной системы (3), удовлетворяющее начальным условиям
изменения t, на котором существует единственное решение нормальной системы (3), удовлетворяющее начальным условиям

Определение:
Система n функций

зависящих от t и n произвольных постоянных  называется общим решением нормальной системы (3) в некоторой области существования и единственности решения задачи Коши, если
называется общим решением нормальной системы (3) в некоторой области существования и единственности решения задачи Коши, если
1) при любых допустимых значениях система функций (6) обращает уравнения (3) в тождества,
2) в области функции (6) решают любую задачу Коши.
Решения, получающиеся из общего при конкретных значениях постоянных называются частными решениями.
Обратимся для наглядности к нормальной системе двух уравнений,
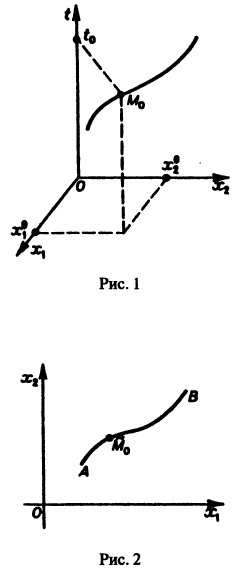
Будем рассматривать систему значений t, x1, х2 как прямоугольные декартовы координаты точки трехмерного пространства, отнесенного к системе координат  Решение
Решение
системы (7), принимающее при  значения
значения  определяет в пространстве некоторую линию, проходящую через точку
определяет в пространстве некоторую линию, проходящую через точку  Эта линия называется интегральной кривой нормальной системы (7). Задача Коши для системы (7) получает следующую геометрическую формулировку: в пространстве переменных t, x1, х2 найти интегральную кривую, проходящую через данную точку (рис. 1). Теорема 1 устанавливает существование и единственность такой кривой.
Эта линия называется интегральной кривой нормальной системы (7). Задача Коши для системы (7) получает следующую геометрическую формулировку: в пространстве переменных t, x1, х2 найти интегральную кривую, проходящую через данную точку (рис. 1). Теорема 1 устанавливает существование и единственность такой кривой.
Нормальной системе (7) и ее решению можно придать еще такое истолкование: будем независимую переменную t рассматривать как параметр, а решение
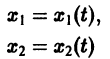
системы — как параметрические уравнения кривой на плоскости  Эту плоскость переменных х1х2 называют фазовой плоскостью. В фазовой плоскости решение
Эту плоскость переменных х1х2 называют фазовой плоскостью. В фазовой плоскости решение  системы (7), принимающее при t = to начальные значения изображается кривой АВ, проходящей через точку
системы (7), принимающее при t = to начальные значения изображается кривой АВ, проходящей через точку  (рис. 2). Эту кривую называют траекторией системы (фазовой траекторией). Траектория системы (7) есть проекция интегральной кривой на фазовую плоскость. По интегральной кривой фазовая траектория определяется однозначно, но не наоборот.
(рис. 2). Эту кривую называют траекторией системы (фазовой траекторией). Траектория системы (7) есть проекция интегральной кривой на фазовую плоскость. По интегральной кривой фазовая траектория определяется однозначно, но не наоборот.
Методы интегрирования систем дифференциальных уравнений
Метод исключения
Один из методов интегрирования — метод исключения. Частным случаем канонической системы является одно уравнение n-го порядка, разрешенное относительно старшей производной
Введя новые функции  заменим это уравнение следующей нормальной системой n уравнений:
заменим это уравнение следующей нормальной системой n уравнений:
т. е. одно уравнение n-го порядка эквивалентно нормальной системе (1)
Можно утверждать и обратное, что, вообще говоря, нормальная система п уравнений первого порядка эквивалентна одному уравнению порядка n. На этом и основан метод исключения для интегрирования систем дифференциальных уравнений.
Делается это так. Пусть имеем нормальную систему
Продифференцируем первое из уравнений (2) по t. Имеем

Заменяя в правой части производные  их выражениями
их выражениями  получим
получим

Уравнение (3) снова дифференцируем по t. Принимая во внимание систему (2), получим
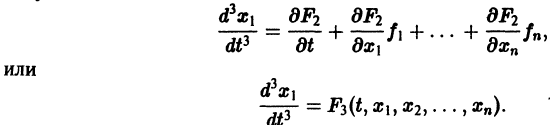
Продолжая этот процесс, найдем
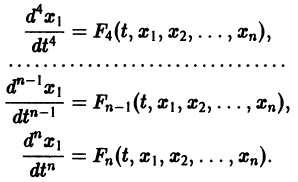
Предположим, что определитель
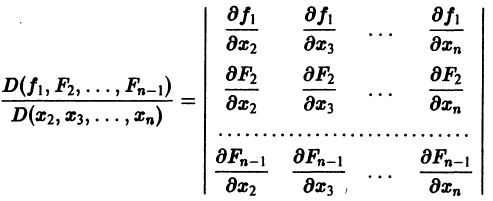
(якобиан системы функций  отличен от нуля при рассматриваемых значениях
отличен от нуля при рассматриваемых значениях 

Тогда система уравнений, составленная из первого уравнения системы (2) и уравнений
будет разрешима относительно неизвестных  При этом выразятся через
При этом выразятся через 
Внося найденные выражения в уравнение
получим одно уравнение n-го порядка

Из самого способа его построения следует, что если  есть решения системы (2), то функция х1(t) будет решением уравнения (5).
есть решения системы (2), то функция х1(t) будет решением уравнения (5).
Обратно, пусть Х1(t) — решение уравнения (5). Дифференцируя это решение по t, вычислим  и подставим найденные значения как известные функции
и подставим найденные значения как известные функции
от t в систему уравнений
По предположению эту систему можно разрешить относительно т. е найти как функции от t.
Можно показать, что так построенная система функций

составляет решение системы дифференциальных уравнений (2). Пример:
Требуется проинтегрировать систему

Дифференцируя первое уравнение системы, имеем

откуда, используя второе уравнение, получаем

— линейное дифференциальное уравнение второго порядка с постоянными коэффициентами с одной неизвестной функцией. Его общее решение имеет вид

В силу первого уравнения системы находим функцию

Найденные функции x(t), y(t), как легко проверить, при любых значениях С1 и С2 удовлетворяют заданной системе.
Функции x(t), y(t) можно представить в виде

откуда видно, что интегральные кривые системы (6) — винтовые линии с шагом  и с общей осью х = у = 0, которая также является интегральной кривой (рис. 3).
и с общей осью х = у = 0, которая также является интегральной кривой (рис. 3).
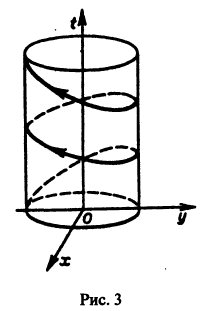
Исключая в формулах (7) параметр t, получаем уравнение
так что фазовые траектории данной системы суть окружности с центром в начале координат — проекции винтовых линий на плоскость хОу.
При А = 0 фазовая траектория состоит из одной точки х = 0, у = 0, называемой точкой покоя системы.
Замечание:
Может оказаться, что функции нельзя выразить через  Тогда уравнения n-го порядка, эквивалентного исходной системе, мы не получим. Вот простой пример. Систему уравнений
Тогда уравнения n-го порядка, эквивалентного исходной системе, мы не получим. Вот простой пример. Систему уравнений
нельзя заменить эквивалентным уравнением второго порядка относительно х1 или x2. Эта система составлена из пары уравнений 1-го порядка, каждое из которых интегрируется независимо, что дает

Метод интегрируемых комбинаций
Интегрирование нормальных систем дифференциальных уравнений

иногда осуществляется методом интегрируемых комбинаций.
Интегрируемой комбинацией называется дифференциальное уравнение, являющееся следствием уравнений (8), но уже легко интегрирующееся.
Пример:
Складывая почленно данные уравнения, находим одну интегрируемую комбинацию:

Вычитая почленно из первого уравнения системы второе, получаем вторую интегрируемую комбинацию:

Мы нашли два конечных уравнения

из которых легко определяется общее решение системы:

Одна интегрируемая комбинация дает возможность получить одно уравнение

связывающее независимую переменную t и неизвестные функции Такое конечное уравнение называется первым интегралом системы (8). Иначе: первым интегралом системы дифференциальных уравнений (8) называется дифференцируемая функция  не равная тождественно постоянной, но сохраняющая постоянное значение на любой интегральной кривой этой системы.
не равная тождественно постоянной, но сохраняющая постоянное значение на любой интегральной кривой этой системы.
Если найдено п первых интегралов системы (8) и все они независимы, т. е. якобиан системы функций  отличен от нуля:
отличен от нуля:
то задача интефирования системы (8) решена (так как из системы
определяются все неизвестные функции 
Системы линейных дифференциальных уравнений
Система дифференциальных уравнений называется линейной, если она линейна относительно неизвестных функций и их производных, входящих в уравнение. Система n линейных уравнений первого порядка, записанная в нормальной форме, имеет вид

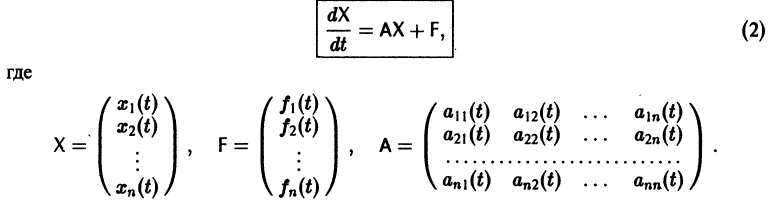
или, в матричной форме,
Теорема:
Если все функции  непрерывны на отрезке
непрерывны на отрезке  то в достаточно малой окрестности каждой точки
то в достаточно малой окрестности каждой точки  где
где  выполнены условия теоремы существования и единственности решения задачи Коши, следовательно, через каждую такую точку проходит единственная интегральная кривая системы (1).
выполнены условия теоремы существования и единственности решения задачи Коши, следовательно, через каждую такую точку проходит единственная интегральная кривая системы (1).
Действительно, в таком случае правые части системы (1) непрерывны по совокупности аргументов t, и их частные производные по  ограничены, так как эти производные равны непрерывным на отрезке [а,b] коэффициентам
ограничены, так как эти производные равны непрерывным на отрезке [а,b] коэффициентам 
Введем линейный оператор
Тогда система (2) запишется в виде

Если матрица F — нулевая, т. е.  на интервале (а,b), то система (2) называется линейной однородной и имеет вид
на интервале (а,b), то система (2) называется линейной однородной и имеет вид

Приведем некоторые теоремы, устанавливающие свойства решений линейных систем.
Теорема:
Если X(t) является решением линейной однородной системы

то cX(t), где с — произвольная постоянная, является решением той же системы.
Теорема:
двух решений  однородной линейной системы уравнений является решением той же системы.
однородной линейной системы уравнений является решением той же системы.
Следствие:
с произвольными постоянными коэффициентами сi решений  линейной однородной системы дифференциальных уравнений
линейной однородной системы дифференциальных уравнений
является решением той же системы.
Теорема:
Если  есть решение линейной неоднородной системы
есть решение линейной неоднородной системы

a Xo(t) — решение соответствующей однородной системы

будет решением неоднородной системы 
Действительно, по условию,

Пользуясь свойством аддитивности оператора  получаем
получаем

Это означает, что сумма  есть решение неоднородной системы уравнений
есть решение неоднородной системы уравнений
Определение:
называются линейно зависимыми на интервале a 
при  причем по крайней мере одно из чисел аi, не равно нулю. Если тождество (5) справедливо только при
причем по крайней мере одно из чисел аi, не равно нулю. Если тождество (5) справедливо только при  то векторы
то векторы 
 называются линейно независимыми на (а, b).
называются линейно независимыми на (а, b).
Заметим, что одно векторное тождество (5) эквивалентно n тождествам:

называется определителем Вронского системы векторов 
Определение:
Пусть имеем линейную однородную систему

где  матрица с элементами
матрица с элементами  Система n решений
Система n решений

линейной однородной системы (6), линейно независимых на интервале а 
с непрерывными на отрезке  коэффициентами
коэффициентами  является линейная комбинация п линейно независимых на интервале а
является линейная комбинация п линейно независимых на интервале а 
( ) — произвольные постоянные числа).
) — произвольные постоянные числа).
Пример:
имеет, как нетрудно проверить, решения

Эти решения линейно независимы, так как определитель Вронского отличен от нуля:

Общее решение системы имеет вид

(с1, с2 — произвольные постоянные).
Фундаментальная матрица
Квадратная матрица
столбцами которой являются линейно независимые решения  системы (6), называется фундаментальной матрицей этой системы. Нетрудно проверить, что фундаментальная матрица удовлетворяет матричному уравнению
системы (6), называется фундаментальной матрицей этой системы. Нетрудно проверить, что фундаментальная матрица удовлетворяет матричному уравнению
Если Х(t) — фундаментальная матрица системы (6), то общее решение системы можно представить в виде
— постоянная матрица-столбец с произвольными элементами. Полагая в (7) t = t0, имеем

Матрица  называется матрицей Коши. С ее помощью решение системы (6) можно представить так:
называется матрицей Коши. С ее помощью решение системы (6) можно представить так:
Теорема:
О структуре общего решения линейной неоднородной системы дифференциальных уравнений. Общее решение в области  линейной неоднородной системы дифференциальных уравнений
линейной неоднородной системы дифференциальных уравнений

с непрерывными на отрезке коэффициентами aij(t) и правыми частями fi(t) равно сумме общего решения
соответствующей однородной системы и какого-нибудь частного решения  неоднородной системы (2):
неоднородной системы (2):

Метод вариации постоянных
Если известно общее решение линейной однородной системы (6), то частное решение неоднородной системы можно находить методом вариации постоянных (метод Лагранжа).
есть общее решение однородной системы (6), тогда

причем решения Xk(t) линейно независимы.
Будем искать частное решение неоднородной системы

где  неизвестные функции от t. Дифференцируя по t, имеем
неизвестные функции от t. Дифференцируя по t, имеем
Подставляя  в (2), получаем
в (2), получаем

то для определения  получаем систему
получаем систему
или, в развернутом виде,

Система (10) есть линейная алгебраическая система относительно определителем которой является определитель Вронского W(t) фундаментальной системы решений . Этот определитель отличен от нуля всюду на интервале a 
где  — известные непрерывные функции. Интегрируя последние соотношения, находим
— известные непрерывные функции. Интегрируя последние соотношения, находим

Подставляя эти значения  в (9), находим частное решение системы (2)
в (9), находим частное решение системы (2)
(здесь под символом  понимается одна из первообразных для функции
понимается одна из первообразных для функции 
Системы линейных дифференциальных уравнений с постоянными коэффициентами
Рассмотрим линейную систему дифференциальных уравнений
в которой все коэффициенты  — постоянные. Чаще всего такая система интегрируется сведением ее к одному уравнению более высокого порядка, причем это уравнение будет также линейным с постоянными коэффициентами. Другой эффективный метод интегрирования систем с постоянными коэффициентами — метод преобразования Лапласа.
— постоянные. Чаще всего такая система интегрируется сведением ее к одному уравнению более высокого порядка, причем это уравнение будет также линейным с постоянными коэффициентами. Другой эффективный метод интегрирования систем с постоянными коэффициентами — метод преобразования Лапласа.
Мы рассмотрим еще метод Эйлера интегрирования линейных однородных систем дифференциальных уравнений с постоянными коэффициентами. Он состоит в следующем.
Метод Эйлера
Будем искать решение системы
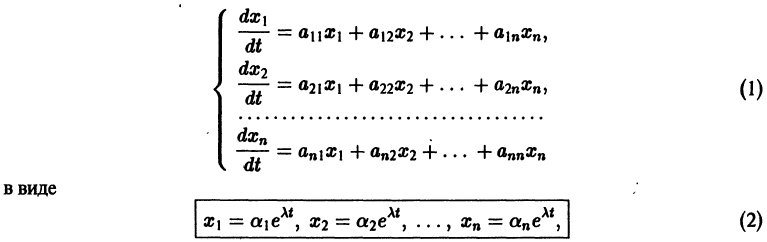
где  — постоянные. Подставляя Xk в форме (2) в систему (1), сокращая на
— постоянные. Подставляя Xk в форме (2) в систему (1), сокращая на  и перенося все члены в одну часть равенства, получаем систему
и перенося все члены в одну часть равенства, получаем систему
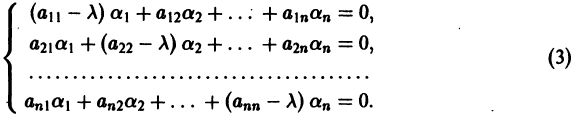
Для того, чтобы эта система (3) линейных однородных алгебраических уравнений с n неизвестными  имела нетривиальное решение, необходимо и достаточно, чтобы ее определитель был равен нулю:
имела нетривиальное решение, необходимо и достаточно, чтобы ее определитель был равен нулю:
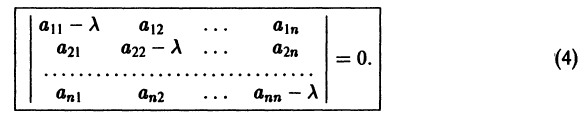
Уравнение (4) называется характеристическим. В его левой части стоит многочлен относительно  степени n. Из этого уравнения определяются те значения , при которых система (3) имеет нетривиальные решения . Если все корни
степени n. Из этого уравнения определяются те значения , при которых система (3) имеет нетривиальные решения . Если все корни  характеристического уравнения (4) различны, то, подставляя их по очереди в систему (3), находим соответствующие им нетривиальные решения
характеристического уравнения (4) различны, то, подставляя их по очереди в систему (3), находим соответствующие им нетривиальные решения  этой системы n, следовательно, находим п решений исходной системы дифференциальных уравнений (1) в виде
этой системы n, следовательно, находим п решений исходной системы дифференциальных уравнений (1) в виде

где второй индекс указывает номер решения, а первый — номер неизвестной функции. Построенные таким образом п частных решений линейной однородной системы (1)

образуют, как можно проверить, фундаментальную систему решений этой системы.
Следовательно, общее решение однородной системы дифференциальных уравнений (1) имеет вид
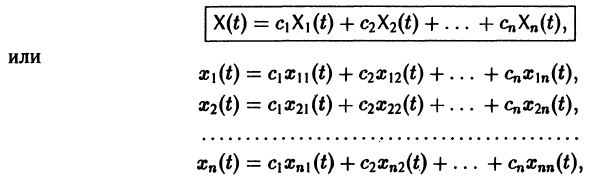
где  произвольные постоянные.
произвольные постоянные.
Случай, когда характеристическое уравнение имеет кратные корни, мы рассматривать не будем.
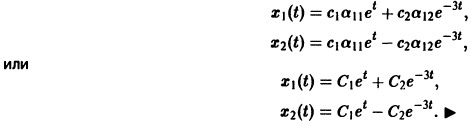
Пример:
Ищем решение в виде


имеет корни 
Система (3) для определения a1, а2 выглядит так:

Подставляя в (*)  получаем
получаем
откуда а21 = а11. Следовательно,

Полагая в  находим a22 = — a12, поэтому
находим a22 = — a12, поэтому

Общее решение данной системы:
Матричный метод
Изложим еще матричный метод интегрирования однородной системы (1). Запишем систему (1) в виде

 матрица с постоянными действительными элементами
матрица с постоянными действительными элементами 
Напомним некоторые понятия из линейной алгебры. Вектор  называется собственным вектором матрицы А, если
называется собственным вектором матрицы А, если
Число называется собственным значением матрицы А, отвечающим собственному вектору g, и является корнем характеристического уравнения
где I — единичная матрица.
Будем предполагать, что все собственные значения  матрицы А различны. В этом случае собственные векторы g1, g2, …gn линейно независимы и существует
матрицы А различны. В этом случае собственные векторы g1, g2, …gn линейно независимы и существует  матрица Т, приводящая матрицу А к диагональному виду, т. е. такая, что
матрица Т, приводящая матрицу А к диагональному виду, т. е. такая, что
Столбцами матрицы Т являются координаты собственных векторов g1, g2 …, gn матрицы А.
Введем еще следующие понятия. Пусть В(t) — матрица, элементы  которой суть функции аргумента t, определенные на множестве . Матрица В(t) называется непрерывной на
которой суть функции аргумента t, определенные на множестве . Матрица В(t) называется непрерывной на  , если непрерывны на все ее элементы . Матрица В(t) называется дифференцируемой на , если дифференцируемы на все элементы этой матрицы. При этом производной матрицы
, если непрерывны на все ее элементы . Матрица В(t) называется дифференцируемой на , если дифференцируемы на все элементы этой матрицы. При этом производной матрицы  называется матрица, элементами которой являются производные
называется матрица, элементами которой являются производные  у соответствующих элементов матрицы В(t).
у соответствующих элементов матрицы В(t).
Пусть B(t) — n х n-матрица,
— вектор-столбец. Учитывая правила алгебры матриц, непосредственной проверкой убеждаемся в справедливости формулы

В частности, если В — постоянная матрица, то
так как  есть нуль-матрица.
есть нуль-матрица.
Теорема:
Если собственные значения матрицы А различны, то общее решение системы (7) имеет вид

где g1, g2,…, gn — собственные векторы-столбцы матрицы А,  произвольные постоянные числа.
произвольные постоянные числа.
Введем новый неизвестный вектор-столбец Y(t) по формуле

где Т — матрица, приводящая матрицу А к диагональному виду. Подставляя X(t) из (11) в (7), получим систему
Умножая обе части последнего соотношения слева на  и учитывая, что
и учитывая, что  придем к системе
придем к системе
Мы получили систему из n независимых уравнений, которая без труда интегрируется:

Здесь  — произвольные постоянные числа.
— произвольные постоянные числа.
Вводя единичные n-мерные векторы-столбцы
решение Y(t) можно представить в виде

В силу (11) Х(t) = TY(t). Так как столбцы матрицы Т есть собственные векторы матрицы  собственный вектор матрицы А. Поэтому, подставляя (13) в (11), получим формулу (10):
собственный вектор матрицы А. Поэтому, подставляя (13) в (11), получим формулу (10):

Таким образом, если матрица А системы дифференциальных уравнений (7) имеет различные собственные значения, для получения общего решения этой системы:
1) находим собственные значения матрицы как корни алгебраического уравнения
2) находим все собственные векторы g1, g2,…, gn;
3) выписываем общее решение системы дифференциальных уравнений (7) по формуле (10).
Пример:
Матрица А системы имеет вид
1) Составляем характеристическое уравнение

Корни характеристического уравнения 
2) Находим собственные векторы

Для = 4 получаем систему
откуда g11 = g12, так что

Аналогично для = 1 находим
3) Пользуясь формулой (10), получаем общее решение системы дифференциальных уравнений
Корни характеристического уравнения могут быть действительными и комплексными. Так как по предположению коэффициенты системы (7) действительные, то характеристическое уравнение
будет иметь действительные коэффициенты. Поэтому наряду с комплексным корнем оно будет иметь и корень *, комплексно сопряженный с . Нетрудно показать, что если g — собственный вектор, отвечающий собственному значению , то * — тоже собственное значение, которому отвечает собственный вектор g*, комплексно сопряженный с g.
При комплексном решение

системы (7) также будет комплексным. Действительная часть
этого решения являются решениями системы (7). Собственному значению * будет отвечать пара действительных решений X1 и -Х2, т. е. та же пара, что и для собственного значения . Таким образом, паре , * комплексно сопряженных собственных значений отвечает пара действительных решений системы (7) дифференциальных уравнений.
Пусть  — действительные собственные значения,
— действительные собственные значения, 
 — комплексные собственные значения. Тогда всякое действительное решение системы (7) имеет вид
— комплексные собственные значения. Тогда всякое действительное решение системы (7) имеет вид

где сi — произвольные постоянные.
Пример:
1) Характеристическое уравнение системы

Его корни 
2) Собственные векторы матриц
3) Решение системы

где а1, а2 — произвольные комплексные постоянные.
Найдем действительные решения системы. Пользуясь формулой Эйлера

Следовательно, всякое действительное решение системы имеет


где с1, с2 — произвольные действительные числа.
Видео:Как распознать талантливого математикаСкачать

Понятие о системах дифференциальных уравнений
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
🔍 Видео
Матрица Якоби (теория)Скачать

Системы дифференциальных уравненийСкачать

14. Операционное исчисление. Система ДУСкачать

Линейная алгебра. Алексей Савватеев и Александр Тонис. Лекция 3.5. Линеаризация систем диф.уровСкачать

Системы дифференциальных уравнений. Метод исключения.Скачать

Якобиан. Коротко и сердитоСкачать
