- Теоретическая механика: Кинематика точки
- § 27. Равномерное прямолинейное движение точки
- § 28. Равномерное криволинейное движение точки
- § 29. Равнопеременное движение точки
- § 30. Неравномерное движение точки по любой траектории
- § 31. Определение траектории, скорости и ускорения точки, если закон ее движения задан в координатной форме
- § 32. Кинематический способ определения радиуса кривизны траектории
- Криволинейное движение материальной точки в теоретической механике
- Криволинейное движение точки
- Криволинейное движение
Теоретическая механика:
Кинематика точки
Смотрите также решения задач по теме «Кинематика точки» в онлайн решебниках Яблонского, Мещерского, Чертова (с примерами и методичкой для заочников), Иродова и Савельева.
В этой главе в основном рассмотрены методы решения задач, в которых закон движения точки выражен так называемым естественным способом: уравнением s=f(t) по заданной траектории *.
* Решения задач, в которых закон движения задан координатным способом, рассмотрены в конце главы (§ 31).
В этом случае главными параметрами, характеризующими движение точки но заданной траектории, являются: s – расстояние от заданного начального положения и t – время.
Величина, характеризующая в каждый данный момент времени направление и быстроту движения точки, называется скоростью (v на рис. 192). Вектор скорости всегда направлен вдоль касательной в ту сторону, куда движется точка. Числовое значение скорости в любой момент времени выражается производной от расстояния по времени:
v = ds/dt или v = f'(t).
Ускорение a точки в каждый данный момент времени характеризует быстроту изменения скорости. При этом нужно отчетливо понимать, что скорость – вектор, и, следовательно, изменение скорости может происходить по двум признакам: по числовой величине (по модулю) и по направлению.
Быстрота изменения модуля скорости характеризуется касательным (тангенсальным) ускорением at – составляющей полного ускорения a, направленной по касательной к траектории (см. рис. 192).
Числовое значение касательного ускорения в общем случае определяется по формуле
at = dv/dt или at = f»(t).
Быстрота изменения направления скорости характеризуется центростремительным (нормальным) ускорением an – составляющей полного ускорения a, направленного по нормали к траектории в сторону центра кривизны (см. рис. 192).
Числовое значение нормального ускорения определяется в общем случае по формуле
an = v 2 /R,
где v – модуль скорости точки в данный момент;
R – радиус кривизны траектории в месте, где находится точка в данный момент.
После того как определены касательное и нормальное ускорения, легко определить и ускорение a ( полное ускорение точки ).
Так как касательная и нормаль взаимно перпендикулярны, то числовое значение ускорения а можно определить при помощи теоремы Пифагора:
a = sqrt(at 2 + an 2 ).
Направление вектора a можно определить, исходя из тригонометрических соотношений, по одной из следующих формул:
sin α = an/a; cos α = at/a; tg α = an/at.
Но можно сначала определить направление полного ускорения a использовав формулу tg α = an/at,
а затем найти числовое значение a:
a = an/sin α или a = at/cos α.
Касательное и нормальное ускорения точки являются главными кинематическими величинами, определяющими вид и особенности движения точки.
Наличие касательного ускорения (at≠0) или его отсутствие (at=0) определяют соответственно неравномерность или равномерность движения точки.
Наличие нормального ускорения (an≠0) или его отсутствие (an=0) определяют криволинейность или прямолинейность движения точки.
Движение точки можно классифицировать так:
а) равномерное прямолинейное (at = 0 и an = 0);
б) равномерное криволинейное (at = 0 и an ≠ 0);
в) неравномерное прямолинейное (at ≠ 0 и an = 0);
г) неравномерное криволинейное (at ≠ 0 и an ≠ 0).
Таким образом, движение точки классифицируется по двум признакам: по степени неравномерности движения и по виду траектории.
Степень неравномерности движения точки задана уравнением s=f(t), а вид траектории задается непосредственно.
§ 27. Равномерное прямолинейное движение точки
Если at=0 и an=0, то вектор скорости остается постоянным (v=const), т. е. не изменяется ни по модулю, ни по направлению. Такое движение называется равномерным прямолинейным .
Уравнение равномерного движения имеет вид
(а) s = s0 + vt
или в частном случае, когда начальное расстояние s0=0,
(б) s = vt.
В уравнение (а) входит всего четыре величины, из них две переменные: s и t и две постоянные: s0 и v. Поэтому в условии задачи на равномерное и прямолинейное движение точки должны быть заданы три любые величины.
При решении задач необходимо выяснить все заданные величины и привести их к одной системе единиц. При этом нужно заметить, что как в системе МКГСС (технической), так и в СИ единицы всех кинематических величин одинаковы: расстояние s измеряется в м, время t – в сек, скорость v – в м/сек.
§ 28. Равномерное криволинейное движение точки
Если at = 0 и an ≠ 0, то модуль скорости остается неизменным (точка движется равномерно), но ее направление изменяется и точка движется криволинейно. Иначе, при равномерном движении по криволинейной траектории точка имеет нормальное ускорение, направленное по нормали к траектории и численно равное
an = v 2 /R,
где R – радиус кривизны траектории.
В частном случае движения точки по окружности (или по дуге окружности) радиус кривизны траектории во всех ее точках постоянный:
R = r = const,
а так как и числовое значение скорости постоянно, то
an = v 2 /r = const.
При равномерном движении числовое значение скорости определяется из формулы
v = (s — s0)/t или v = s/t.
Если точка совершит полный пробег по окружности, то путь s равен длине окружности, т. е. s = 2πr = πd (d = 2r – диаметр), а время равно периоду, т. е. t = T. Выражение скорости примет вид
v = 2πr/T = πd/T.
§ 29. Равнопеременное движение точки
Если вектор at=const (касательное ускорение постоянно как по модулю, так и по направлению), то an=0. Такое движение называется равнопеременным и прямолинейным .
Если же постоянным остается только числовое значение касательного уравнения
at = dv/dt = f'(t) = const,
то an≠0 и такое движение точки называется равнопеременным криволинейным .
При |at|>0 движение точки называется равноускоренным , а при |at| равнозамедленным .
Уравнение равнопеременного движения независимо от его траектории имеет вид
(1) s = s0 + v0t + att 2 / 2.
Здесь s0 – расстояние точки от исходного положения в момент начала отсчета; v0 – начальная скорость и at – касательное ускорение – величины численно постоянные, a s и t – переменные.
Числовое значение скорости точки в любой момент времени определяется из уравнения
(2) v = v0 + att.
Уравнения (1) и (2) являются основными формулами равнопеременного движения и они содержат шесть различных величин: три постоянные: s0, v0, at и три переменные: s, v, t.
Следовательно, для решения задачи на равнопеременное движение точки в ее условии должно быть дано не менее четырех величин (систему двух уравнений можно решить лишь в том случае, если они содержат два неизвестных).
Если неизвестные входят в оба основных уравнения, например, неизвестны at и t, то для удобства решения таких задач выведены вспомогательные формулы:
после исключения at из (1) и (2)
(3) s = s0 + (v + v0)t / 2;
после исключения t из (1) и (2)
(4) s = s0 + (v 2 — v0 2 ) / (2at).
В частном случае, когда начальные величины s0=0 и v0=0 (равноускоренное движение из состояния покоя), то получаем те же формулы в упрощенном виде:
(5) s = att 2 / 2;
(6) v = att;
(7) s = vt / 2;
(8) s = v 2 / (2at).
Уравнения (5) и (6) являются основными, а уравнения (7) и (8) – вспомогательными.
Равноускоренное движение из состояния покоя, происходящее под действием только силы тяжести, называется свободным падением . К этому движению применимы формулы (5)–(8), причем
at = g = 9,81 м/сек 2 ≈ 9,8 м/сек 2 .
§ 30. Неравномерное движение точки по любой траектории
§ 31. Определение траектории, скорости и ускорения точки, если закон ее движения задан в координатной форме
Если точка движется относительно некоторой системы координат, то координаты точки изменяются с течением времени. Уравнения, выражающие функциональные зависимости координат движущейся точки от времени, называют уравнениями движения точки в системе координат (см. § 51, п. 2 в учебнике Е. М. Никитина).
Движение точки в пространстве задается тремя уравнениями:
x = f1(t);
(1) y = f2(t);
z = f3(t);
Движение точки в плоскости (рис. 203) задается двумя уравнениями:
(2) x = f1(t);
y = f2(t);
Системы уравнений (1) или (2) называют законом движения точки в координатной форме .
Ниже рассматривается движение точки в плоскости, поэтому используется только система (2).
Если закон движения точки задан в координатной форме, то:
а) траектория плоского движения точки выражается уравнением
y = F(x),
которое образуется из данных уравнений движения после исключения времени t;
б) числовое значение скорости точки находится из формулы
v = sqrt(vx 2 + vy 2 )
после предварительного определения проекции (см. рис. 203) скорости на оси координат
vx = dx/dt и vy = dy/dt;
в) числовое значение ускорения находится из формулы
a = sqrt(ax 2 + ay 2 )
после предварительного определения проекций ускорения на оси координат
ax = dvx/dt и ay = dvy/dt;
г) направления скорости и ускорения относительно осей координат определяются из тригонометрических соотношений между векторами скорости или ускорения и их проекциями.
§ 32. Кинематический способ определения радиуса кривизны траектории
При решении многих технических задач возникает необходимость знать радиус кривизны R (или 1/R – кривизну ) траектории. Если задано уравнение траектории, то радиус ее кривизны в любой точке можно определить при помощи дифференциального исчисления. Используя уравнения движения точки в координатной форме, можно определять радиус кривизны траектории движущейся точки без непосредственного исследования уравнения траектории. Определение радиуса кривизны траектории при помощи уравнений движения точки в координатной форме называется кинематическим способом. Этот способ основан на том, что радиус кривизны траектории движущейся точки входит в формулу
an = v 2 /R,
выражающую числовое значение нормального ускорения.
Скорость v точки определяется по формуле
(б) v = sqrt(vx 2 + vy 2 ).
Числовое значение нормального ускорения an входит в выражение полного ускорения точки
a = sqrt(an 2 + at 2 ),
откуда
(в) an = sqrt(a 2 — at 2 ),
где квадрат полного ускорения
(г) a 2 = ax 2 + ay 2
и касательное ускорение
(д) at = dv/dt.
Таким образом, если закон движения точки задан уравнениями
x = f1(t);
y = f2(t),
то при определении радиуса кривизны траектории рекомендуется произвести следующее:
1. Продифференцировав уравнения движения, найти выражения проекций на оси координат вектора скорости:
vx = f1‘(t);
vy = f2‘(t).
2. Подставив в (б’) выражения vx и vy, найти v 2 .
3. Продифференцировав по t уравнение (б), полученное непосредственно из (б’), найти касательное ускорение at, а затем at 2 .
4. Продифференцировав вторично уравнения движения, найти выражения проекций на оси координат вектора ускорения
ax = f1»(t) = vx‘;
ay = f2»(t) = vy‘.
5. Подставив в (г) выражения ax и ay, найти a 2 .
6. Подставить в (в) значения a 2 и at 2 и найти an.
7. Подставив в (а) найденные значения v 2 и an, получить радиус кривизны R.
Криволинейное движение материальной точки в теоретической механике
Содержание:
Криволинейное движение материальной точки:
В случае криволинейного движения по плоскости имеется два дифференциальных уравнения движения точки в декартовой системе координат, а в общем случае движения в пространстве— система трех дифференциальных уравнений. Дифференциальные уравнения криволинейного движения точки интегрируются сравнительно просто, если каждое из этих уравнений интегрируется независимо от других уравнений и при этом возможен один из трех рассмотренных случаев зависимости проекции равнодействующей силы от времени, координаты и скорости.
Рассмотрим примеры криволинейного движения точки в плоскости и в пространстве:
Пример 1. Материальная точка массой 
Определить уравнения движения точки и уравнение ее траектории в координатной форме.
Решение:
Пусть в момент  движущаяся точка имеет координаты
движущаяся точка имеет координаты  и
и  . Прикладываем к точке силу
. Прикладываем к точке силу  и составляем дифференциальные уравнения ее движения в проекциях на оси координат. Имеем:
и составляем дифференциальные уравнения ее движения в проекциях на оси координат. Имеем:

дифференциальные уравнения принимают форму

Для интегрирования этих уравнений можно применить подстановки
или интегрировать их как линейные дифференциальные уравнения с постоянными коэффициентами. Выполним интегрирование уравнений, используя подстановки. Имеем
Аналогично для  получаем
получаем
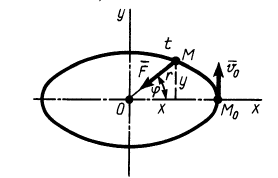
Рис. 11


Эти дифференциальные уравнения интегрируем путем разделения переменных. Получаем
Выполняя интегрирование и подставляя пределы, имеем


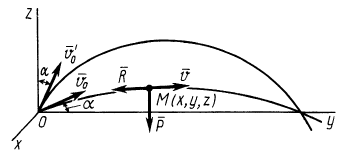
Рис. 12
и уравнения движения точки принимают вид

Возводя в квадрат  и
и  , получаем уравнение траектории точки в координатной форме:
, получаем уравнение траектории точки в координатной форме:

Траекторией точки оказался эллипс с полуосями  и
и  .
.
Пример 2. Материальная точка массой  (рис. 12) брошена с поверхности Земли в вертикальной плоскости со скоростью
(рис. 12) брошена с поверхности Земли в вертикальной плоскости со скоростью  под углом
под углом  к горизонту. Определить уравнения движения точки, если сила сопротивления воздуха, направленная против скорости, пропорциональна скорости и массе, т. е.
к горизонту. Определить уравнения движения точки, если сила сопротивления воздуха, направленная против скорости, пропорциональна скорости и массе, т. е.  , где
, где  — постоянный коэффициент пропорциональности.
— постоянный коэффициент пропорциональности.
Решение:
Задачу удобно решать в прямоугольной декартовой системе координат, начало которой находится в точке бросания, а ось  направлена по вертикали вверх. Оси
направлена по вертикали вверх. Оси  и
и  при этом расположатся в горизонтальной плоскости. Для определенности предположим, что начальная скорость
при этом расположатся в горизонтальной плоскости. Для определенности предположим, что начальная скорость  располагается в плоскости
располагается в плоскости  . Для составления дифференциальных уравнений движения точки возьмем такое ее положение в момент
. Для составления дифференциальных уравнений движения точки возьмем такое ее положение в момент  , когда координаты точки
, когда координаты точки  и их первые производные по времени положительны. На точку действуют две силы: сила тяжести
и их первые производные по времени положительны. На точку действуют две силы: сила тяжести  , направленная по вертикали вниз, и сила сопротивления
, направленная по вертикали вниз, и сила сопротивления  , направление которой противоположно направлению скорости
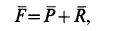
, направление которой противоположно направлению скорости  . Равнодействующая сила
. Равнодействующая сила
причем  .
.
Для проекций равнодействующей силы  на оси координат, считая, что в выбранном положении точки и положительных значениях
на оси координат, считая, что в выбранном положении точки и положительных значениях  , имеем
, имеем
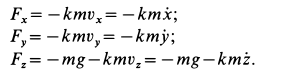
Знак минус у проекций силы сопротивления указывает на то, что их знаки противоположны знакам проекций скорости, принятым положительными.
Дифференциальные уравнения движения точки имеют вид

При сделанном выборе осей координат имеем следующие начальные условия:

Каждое дифференциальное уравнение системы в рассматриваемом случае можно интегрировать отдельно, независимо от других уравнений. После сокращения на т дифференциальные уравнения примут вид

Разделяя переменные и интегрируя каждое из уравнений системы, получаем:

После потенцирования имеем:

Подставляя в (г) начальные значения для  , получаем уравнения для определения произвольных постоянных
, получаем уравнения для определения произвольных постоянных  :
:

Постоянные интегрирования имеют следующие значения:

После подстановки постоянных интегрирования в (г) и замены проекций скорости на оси координат производными от координат по времени получаем

Разделяя в (г’) переменные и интегрируя каждое дифференциальное уравнение первого порядка, имеем

Подставляя в (д) начальные условия, получаем уравнения для определения постоянных интегрирования  :
:


Подставляя значения постоянных в (д), получаем искомые уравнения движения точки:
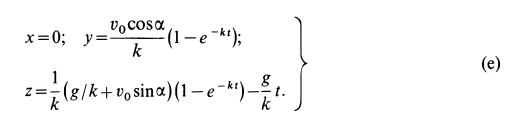
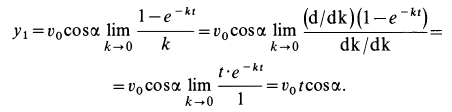
Проведем некоторые исследования движения точки. Из уравнений движения (е) путем предельного перехода при  , стремящемся к нулю, можно получить уравнения движения точки под действием только одной силы тяжести. Обозначая координаты точки в этом случае
, стремящемся к нулю, можно получить уравнения движения точки под действием только одной силы тяжести. Обозначая координаты точки в этом случае  , раскрываем неопределенности в уравнениях (е) по правилу Лопиталя. Для
, раскрываем неопределенности в уравнениях (е) по правилу Лопиталя. Для  получаем
получаем
Прежде чем переходить к пределу в  , преобразуем его к виду
, преобразуем его к виду

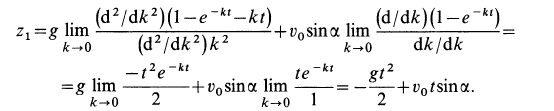
Получаем следующие уравнения движения точки под действием одной силы тяжести:

Если из этих уравнений исключить время  , то получим уравнения траектории точки в координатной форме (рис. 12):
, то получим уравнения траектории точки в координатной форме (рис. 12):

Траекторией точки является парабола, расположенная в плоскости  .
.
Если в (ж) принять  , то
, то  при этом окажется горизонтальной дальностью
при этом окажется горизонтальной дальностью  , которая определяется по формуле
, которая определяется по формуле

Из (з) следует, что наибольшая горизонтальная дальность получается при угле бросания  :
:
При других углах бросания  одну и ту же дальность , как это следует из (з), можно получить бросая точку под углом
одну и ту же дальность , как это следует из (з), можно получить бросая точку под углом  к горизонту или под тем же углом
к горизонту или под тем же углом  к вертикали с той же самой скоростью
к вертикали с той же самой скоростью  .
.
Криволинейное движение точки
Как известно из кинематики, при движении материальной точки по криволинейной траектории ее ускорение  имеет два составляющих ускорения:
имеет два составляющих ускорения:  — касательное (тангенциальное) и
— касательное (тангенциальное) и  — — нормальное (центростремительное).
— — нормальное (центростремительное).
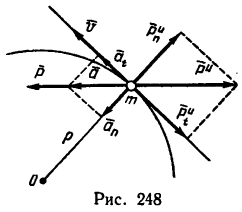
Из динамики уже известно, что ускорение  , приобретенное точкой, есть результат действия определенной системы сил. Равнодействующая
, приобретенное точкой, есть результат действия определенной системы сил. Равнодействующая  этой системы и ускорение
этой системы и ускорение  (рис. 248) находятся в зависимости, выражающей основной закон динамики точки:
(рис. 248) находятся в зависимости, выражающей основной закон динамики точки:

Если уравновесить силу  приложением к точке силы инерции
приложением к точке силы инерции  , а затем разложить ее на две составляющие
, а затем разложить ее на две составляющие  соответственно по нормали и по касательной, то эти составляющие будут находиться в зависимости от нормальных и касательных ускорений, определяемых такими векторными равенствами:
соответственно по нормали и по касательной, то эти составляющие будут находиться в зависимости от нормальных и касательных ускорений, определяемых такими векторными равенствами:

В задачах на криволинейное движение точки в основном рассматривается нормальная (центробежная) сила инерции 
Числовое значение нормальной (центробежной) силы инерции можно выражать следующими формулами:

Заменим здесь

Если материальная точка, рассматриваемая в задаче, связана с каким-либо вращающимся телом, то скорость точки удобнее выражать через угловую скорость тела  и тогда
и тогда

Если в последней формуле выразить массу точки через ее вес  , а угловую скорость — в об. мин
, а угловую скорость — в об. мин  то
то 
Здесь  поэтому формуле можно придать такой вид
поэтому формуле можно придать такой вид
 (4)
(4)
Эта формула дает приближенное значение центробежной силы инерции, но она очень удобна при решении многих задач.
Последовательность решения задач на криволинейное движение точки при помощи метода кинетостатики та же, что в предыдущем параграфе.
Задача №1
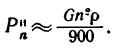
Шарик, масса которого m= 0,5 кг, привязки к нити длиной 0,7 м. Нить вместе с шариком вращается в вертикальной плоскости, затрачивая на один оборот 1 сек. Определить натяжение шнура в моменты высшего и низшего положения шарика, считая, что скорость остается постоянной при перемещении по всей длине окружности.
1. В соответствии с условием задачи считаем, что шарик движется равномерно по окружности, радиус которой равен длине нити (r=0,7 м). Следовательно, его скорость

Оставаясь численно неизменной, скорость точки непрерывно изменяет направление, значит точка имеет нормальное ускорение

2. Рассмотрим движущийся шарик в тот момент, когда он проходит через верхнюю точку траектории (рис. 249, а).
На шарик действуют две силы: его вес  и реакция нити
и реакция нити  равная ее натяжению. Заметим, что обе силы направлены в одну сторону — к точке О подвеса, так как вес всегда направлен вертикально вниз. Реакция гибкой связи всегда направлена вдоль нити от тела, которое удерживается нитью. Шарик, привязанный к нити и приведенный в движение, стремится согласно закону инерции двигаться равномерно и прямолинейно и поэтому он постоянно натягивает пить.
равная ее натяжению. Заметим, что обе силы направлены в одну сторону — к точке О подвеса, так как вес всегда направлен вертикально вниз. Реакция гибкой связи всегда направлена вдоль нити от тела, которое удерживается нитью. Шарик, привязанный к нити и приведенный в движение, стремится согласно закону инерции двигаться равномерно и прямолинейно и поэтому он постоянно натягивает пить.
3. Добавим к силам  силу инерции
силу инерции  направив ее в сторону, противоположную ускорению
направив ее в сторону, противоположную ускорению  Образовав таким образом уравновешенную систему сил, получим уравнение равновесия
Образовав таким образом уравновешенную систему сил, получим уравнение равновесия

4. Из уравнения разновесия находим  учитывая, что
учитывая, что 

Подставим в это уравнение числовые значения:

Таким образом, находясь в верхнем положении, двигающийся шарик натягивает пить силой 8,9 н, что соответствует 0,91 кГ.
0,91 кГ.
Отметим, что натяжение нити будет ослабевать при уменьшении скорости движения шарика. Следовательно, для того чтобы шарик при движении в вертикальной плоскости смог пройти верхнюю точку траектории с заданным радиусом кривизны р, он должен иметь в этой точке определенную скорость.
5. Рассмотрим теперь движущийся шарик в момент прохождения нм нижней точки траектории (рис. 249,6).
В этом положении на шарик действуют также две силы: вес  и реакция нити
и реакция нити  но в отличие от предыдущего случая эти силы, действуя вдоль одной прямой, направлены в противоположные стороны.
но в отличие от предыдущего случая эти силы, действуя вдоль одной прямой, направлены в противоположные стороны.
6. Добавим к силам  силу инерции
силу инерции  и составим уравнение равновесия:
и составим уравнение равновесия:

7. Находим 


Как видно, при прохождении через нижнюю точку траектории шарик создает наибольшее натяжение нити.
Задача №2
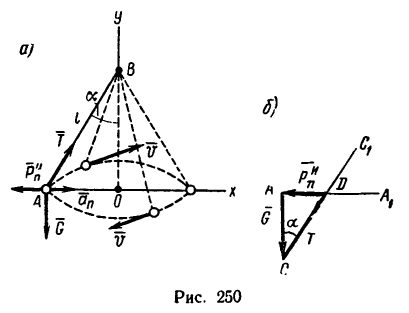
Шарик А, масса которого 2 кг, подвешен на нити длиной 60 см, закрепленной в точке В. Он равномерно двигается по окружности в горизонтальной плоскости так, что нить описывает коническую поверхность и образует с вертикалью угол а = 30°. Определить натяжение нити и скорость шарика.
Решение 1 — с применением метода проекций.
1. Если масса шарика m=2 кг, то его вес G = mg = 2* 9,81 =19,62 н.Кроме веса, на шарик действует натяжение (реакция  нити. Длина нити l= 60 см = 0,6 м.
нити. Длина нити l= 60 см = 0,6 м.
Изобразим двигающийся шарик с приложенными к нему силами G и  (рис. 250,а). Так как шарик
(рис. 250,а). Так как шарик
мерно, то он имеет только
6. Добавим к силам  силу инерции
силу инерции  и составим уравнение равновесия:
и составим уравнение равновесия:

7. Находим 


Как видно, при прохождении через нижнюю точку траектории шарик создает наибольшее натяжение нити.
Задача №3
Шарик А, масса которого 2 кг, подвешен на нити длиной 60 см, закрепленной в точке В. Он равномерно двигается по окружности в горизонтальной плоскости так, что нить описывает коническую поверхность и образует с вертикалью угол а = 30°. Определить натяжение нити и скорость шарика.
Решение 1 — с применением метода проекций.
1. Если масса шарика m=2 кг, то его вес G = mg =  =19,62 н
=19,62 н
Кроме веса, на шарик действует натяжение (реакция  нити. Длина нити
нити. Длина нити 

Изобразим двигающийся шарик с приложенными к нему силами  (рис. 250,а). Так как шарик мерно, то он имеет только
(рис. 250,а). Так как шарик мерно, то он имеет только
движется по окружности равно-нормальное ускорение , направленное по радиусу АО = r окружности. Применяя принцип Даламбера, для уравновешивания сил Т и G приложим к шарику нормальную (центробежную) силу инерции
, направленное по радиусу АО = r окружности. Применяя принцип Даламбера, для уравновешивания сил Т и G приложим к шарику нормальную (центробежную) силу инерции
Изображая на рис. 250 силу инерции, необходимо учитывать, что она прикладывается к шарику условно. В действительности, сила инерции, как известно, приложена к двигающему телу или к связи. В данном случае нить служит для шарика и двигающим телом (через нить шарик приводится в движение), и связью (нить одновременно и ограничивает движение шарика). Поэтому сила инерции приложена к нити и отклоняет ее су вертикали.
2. Совместив оси координат с прямыми AO и ВО и спроектировав силы на оси х и у, выведем уравнения равновесия:

3. Из уравнения (2)

4 Из уравнения (1)

Так как 
где  —искомая скорость шарика, а радиус окружности
—искомая скорость шарика, а радиус окружности 
Таким образом, натяжение нити составляет 22,7 н при скорости движения шарика 1,3 м/сек.
Решение 2—с применением графо-аналитического метода.
1. Этот вариант решения начинаем так же, как и предыдущий: изображаем шарик с действующими на него силами С = 19,62 н и искомой Т, а затем добавляем силу инерции  направленную противоположно вектору
направленную противоположно вектору  (см. рис. 250, о).
(см. рис. 250, о).
2. Силы  образуют уравновешенную систему, поэтому многоугольник, построенный из векторов этих сил, должен быть замкнутым. Построение силового многоугольника начинаем с изображения вектора
образуют уравновешенную систему, поэтому многоугольник, построенный из векторов этих сил, должен быть замкнутым. Построение силового многоугольника начинаем с изображения вектора  (рис. 250,6). Затем из точек С и A проводим соответственно линии
(рис. 250,6). Затем из точек С и A проводим соответственно линии параллельные направлениям сил
параллельные направлениям сил  (см. рис. 250,а). Прямые
(см. рис. 250,а). Прямые пересекаются в точке D и образуется векторный прямоугольный треугольник
пересекаются в точке D и образуется векторный прямоугольный треугольник  в котором
в котором 
3. Из прямоугольного треугольника ACD имеем: 
И, наконец, так же как и в первом решении, находим скорость движения шарика по окружности
Задача №4
Тонкий стержень AВ, центр тяжести которого расположен на его оси О, вращается с угловой скоростью n -3009 об, мин.
На сколько увеличится нагрузка на подшипник, в котором вращается стержень, если на одну из половинок стержня прикрепить массу m — 0,5 кг, на расстоянии р = 0,1 м от оси вращения (рис. 251,а).
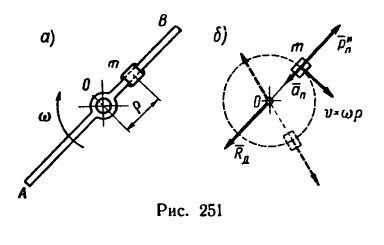
1. Стержень АВ без прикрепленной к нему массы т создает нагрузку на подшипник, равную его собственному весу. Причем, если стержень хорошо центрирован, т. е. его центр тяжести расположен точно на оси подшипника, то нагрузка при вращении не изменится — она также будет равна весу стержня и будет действовать на подшипник вертикально вниз.
2. Если к стержню, по условию задачи, прикрепить массу m, то эта масса (примем ее за материальную точку), двигаясь по окружности радиусом р = 0,1 м, начнет растягивать ту часть стержня, которая расположена между массой т и подшипником, силой, равной  Благодаря этому возникает дополнительная так называемая динамическая нагрузка на подшипник, уравновешиваемая его реакцией
Благодаря этому возникает дополнительная так называемая динамическая нагрузка на подшипник, уравновешиваемая его реакцией  (рис. 251,6).
(рис. 251,6).
3. Так как увеличение нагрузки равно возникшей силе инерции 
Подставим эти значения в формулу (3):
PJ| = 0,5 • 3142 • 0,1 =4929,8 н?«4,93 кн.
Таким образом, в результате прикрепления массы т нагрузка на подшипник увеличивается почти на 5 кн, что соответствует почти 
4. Применив формулу (4) и положив в ней 
 м, найдем силу инерции
м, найдем силу инерции  выраженную в кГ:
выраженную в кГ: 
Результат, получившийся в этой задаче, подтверждает необходимость тщательной балансировки вращающихся деталей машин. Несбалансированные детали при вращении создают огромные дополнительные динамические нагрузки, которые приводят к быстрому износу подшипников.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Движение несвободной материальной точки
- Относительное движение материальной точки
- Геометрия масс
- Свойства внутренних сил системы
- Аксиомы классической механики
- Дифференциальные уравнения движения материальной точки
- Две основные задачи динамики точки
- Прямолинейное движение точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Telegram и логотип telegram являются товарными знаками корпорации Telegram FZ-LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Криволинейное движение
Криволинейное движение – это движение, траектория которого представляет собой кривую линию (например, окружность, эллипс, гиперболу, параболу). Примером криволинейного движения является движение планет, конца стрелки часов по циферблату и т.д. В общем случае скорость при криволинейном движении изменяется по величине и по направлению.
Криволинейное движение материальной точки считается равномерным движением, если модуль скорости постоянен (например, равномерное движение по окружности), и равноускоренным, если модуль и направление скорости изменяется (например, движение тела, брошенного под углом к горизонту).
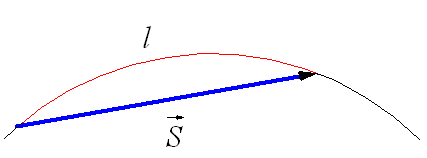 Рис. 1.19. Траектория и вектор перемещения при криволинейном движении.
Рис. 1.19. Траектория и вектор перемещения при криволинейном движении.
При движении по криволинейной траектории вектор перемещения  направлен по хорде (рис. 1.19), а l – длина траектории. Мгновенная скорость движения тела (то есть скорость тела в данной точке траектории) направлена по касательной в той точке траектории, где в данный момент находится движущееся тело (рис. 1.20).
направлен по хорде (рис. 1.19), а l – длина траектории. Мгновенная скорость движения тела (то есть скорость тела в данной точке траектории) направлена по касательной в той точке траектории, где в данный момент находится движущееся тело (рис. 1.20).
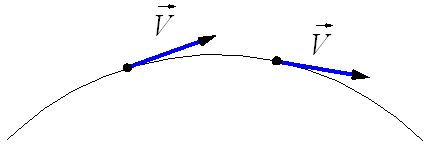 Рис. 1.20. Мгновенная скорость при криволинейном движении.
Рис. 1.20. Мгновенная скорость при криволинейном движении.
Криволинейное движение – это всегда ускоренное движение. То есть ускорение при криволинейном движении присутствует всегда, даже если модуль скорости не изменяется, а изменяется только направление скорости. Изменение величины скорости за единицу времени – это тангенциальное ускорение:
Где vτ, v0 – величины скоростей в момент времени t0 + Δt и t0 соответственно.
Тангенциальное ускорение в данной точке траектории по направлению совпадает с направлением скорости движения тела или противоположно ему.
Нормальное ускорение — это изменение скорости по направлению за единицу времени:
Нормальное ускорение направлено по радиусу кривизны траектории (к оси вращения). Нормальное ускорение перпендикулярно направлению скорости.
Центростремительное ускорение – это нормальное ускорение при равномерном движении по окружности.
Полное ускорение при равнопеременном криволинейном движении тела равно:
Движение тела по криволинейной траектории можно приближённо представить как движение по дугам некоторых окружностей (рис. 1.21).
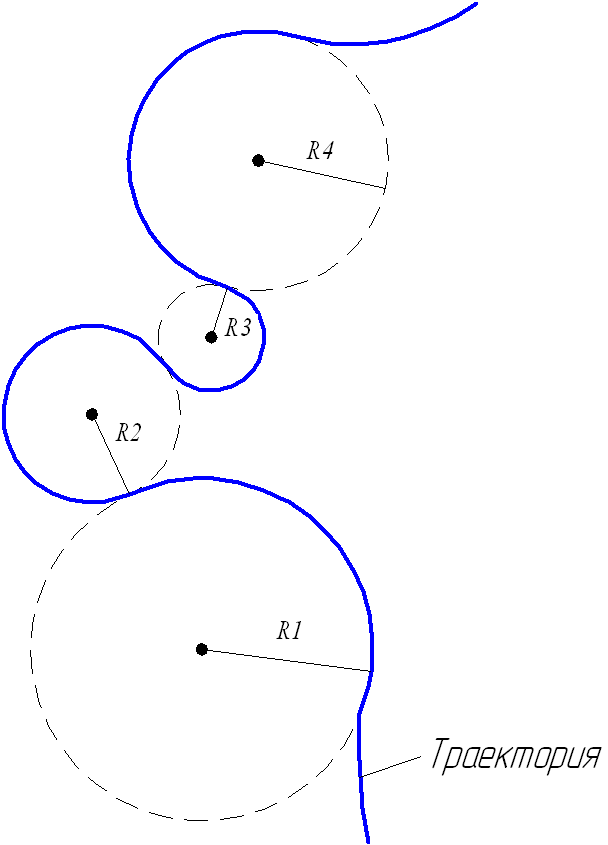 Рис. 1.21. Движение тела при криволинейном движении.
Рис. 1.21. Движение тела при криволинейном движении.