- Математический маятник — что это такое
- Определение модели системы
- Маятник Фуко
- Период колебаний математического маятника
- Чему равен, от чего зависит частота
- Уравнения движения и их решение, формулы с примерами
- Практическое применение математического маятника
- Формулы математического маятника
- Определение и формулы математического маятника
- Уравнение движения математического маятника
- Циклическая частота и период колебаний математического маятника
- Уравнение энергии для математического маятника
- Примеры задач с решением
- 1.1. Уравнение гармонических колебаний
Математический маятник — что это такое
Маятник — твердое тело, которое совершает под действием приложенных сил механические колебания около неподвижной точки или оси.
Простейший маятник состоит из небольшого груза массой m, подвешенного на невесомой нити или тонком стержне длиной l и совершающего колебания под воздействием земного притяжения. Если нить считать нерастяжимой, размер груза незначительным по сравнению с длиной нити, а массу нити незначительной по сравнению с массой груза, то груз можно считать материальной точкой массой m, находящейся на постоянном расстоянии l от точки подвеса. Такой маятник называют математическим.
Определение модели системы
Математические модели динамических систем часто используют для анализа самых разных технических, социально-экономических, естественнонаучных систем, в которых происходят циклические процессы.
Существуют различные классификации динамических процессов. Одна из них изображена на схеме:
Маятник Фуко
Маятник Фуко — подвес, плоскость колебаний которого со временем изменяется. Он был создан для экспериментальной демонстрации суточного вращения Земли. Впервые опыт, доказывающий, что Земля вращается, был проведен французским ученым Жаном Фуко в 1851 году в Парижской обсерватории. Маятник имел вид металлического шара массой 28 кг, подвешенного на нити длиной 67 м. Период его колебаний составлял 16,4 с.
Наблюдая за его колебаниями, можно было заметить, что плоскость, в которой они происходят, медленно поворачивается, причем в разных местах земного шара с различной скоростью. Она минимальна, т. е. равна нулю, на экваторе планеты, а максимальна — на ее полюсах.
Если мы обозначим период вращения Земли вокруг ее оси Т, а географическую широту местности — φ , тогда время t, за которое плоскость колебаний маятника совершает полный оборот, окажется равно
Отсюда следует, что если бы Земля не вращалась, данного эффекта просто не существовало бы. Это обстоятельство указывает на то, что причиной неинерциальности земной системы отсчета является вращение планеты.
Центробежное ускорение на экваторе равно 0 , 034 м / с 2 . По сравнению с экваториальным ускорением свободного падения g = 9 , 78 м / с 2 это величина малая, но она заметно влияет на изменение веса тела на экваторе по сравнению с его весом на полюсе. Если, например, взвешивать на пружинных весах тело массой 10 кг, то уменьшение веса на экваторе за счет действия центробежной силы составит около 35 г.
Период колебаний математического маятника
Период колебаний — время, за которое происходит одно полное колебание. В СИ измеряется в секундах.
Чему равен, от чего зависит частота
Если за время t совершается N колебаний, то период, обозначаемый буквой T, равен
где v — частота колебаний. Она обратно пропорциональна периоду.
Колебания можно изобразить в виде графика:
.
Период колебаний математического маятника можно рассчитать по формуле
g — ускорение свободного падения. Не зависит от амплитуды колебаний и массы груза.
Циклическая частота — число колебаний, которые система совершает за 2 π секунды. Также циклическую частоту называют угловой, круговой или радиальной. Кратко ее записывают греческой буквой ω . Она позволяет упростить расчеты с использованием радианов, так как при ее введении сокращаются множители 2 π .
В случае математического маятника она определяется длиной подвеса и ускорением свободного падения:
Для физического маятника в уравнение добавляются инерция и масса подвеса:
Для пружинного маятника частоту определяет жесткость пружины k:
Уравнения движения и их решение, формулы с примерами
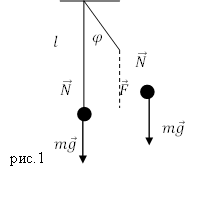
Математический маятник — это материальная точка, имеющая массу m и подвешенная на нити с неизменяемой длиной l. Покидая положение равновесия, подвес совершает колебательные движения по дуге.
.
Угловое ускорение ε — вторая производная от угла поворота α , вращающий момент относительно точки А создает только сила тяжести:
M = — m g × l sin α .
Угол отклонения мал, поэтому мы учитываем только то, что он отрицателен. Синус угла α считаем приблизительно равным α . Тогда:
m l 2 × α ‘ ‘ = — m g l α ;
Это дает нам дифференциальное уравнение гармонических колебаний
Из уравнения следует, что при малых углах отклонения от положения равновесия маятник будет колебаться с периодом
T = 2 π ω = 2 π l g .
Все кинематические характеристики движения меняются по гармоническим законам, т. е. по закону синуса или косинуса. Рассмотрим, от чего зависят константы амплитуды А и начальной фазы движения φ 0 .
Амплитуда колебаний определяется энергией, переданной маятнику при отклонении от положения равновесия. В случае пружинного маятника в крайнем положении скорость груза и кинетическая энергия равны нулю, полная энергия состоит только из потенциальной энергии:
E п о л н а я = k A 2 2 .
Из этого следует, что
А = 2 E п о л н а я k .
Начальная фаза зависит от того, как маятник вывели из положения равновесия. Рассмотрим ситуацию, в которой маятник отклонили от положения равновесия на расстояние А и отпустили без начальной скорости. Запишем уравнение движения колеблющегося тела с учетом того факта, что в начальный момент координата тела будет равна А:
x = A × cos ω t + φ 0 ;
x ( 0 ) = A × cos ω × 0 + φ 0 = A × cos φ 0 = А ⇒ cos φ 0 = 1 ⇒ φ 0 = 1 .
Уравнение движения маятника:
Если маятник толкнули, когда он находился в положении равновесия, начальная координата колеблющейся точки будет равна нулю:
x ( 0 ) = A × cos ω × 0 + φ 0 = A × cos φ 0 = 0 ⇒ cos φ 0 = 0 ⇒ φ 0 = ± π 2 .
Будет ли начальная координата положительной или отрицательной, определяет выбор положительного направления оси. Если направление оси совпадет с направлением начальной скорости, то в уравнении движения будет знак «плюс», если не совпадет — знак «минус».
Уравнение движения маятника:
x ( 0 ) = A × cos ω t ± π 2 = ± A × sin ω t .
Рассмотрим задачи, для которых требуется составлять и решать уравнения движения.
Необходимо определить амплитуду и частоту колебаний точки, если известно, что при смещении точки от положения равновесия на 5 см ее скорость равна 6 см/с, а при смещении на 3 см — 10 см/с.
x = A × cos ω t + φ 0 v x = x ‘ = — A ω × sin ω t + φ 0
Исключаем время из системы:
x = A × cos ω t + φ 0 v x = x ‘ = — A ω × sin ω t + φ 0 ⇒ x = A × cos ω t + φ 0 v x ω = — A × sin ω t + φ 0 ⇒ x 2 = A 2 × cos 2 ω t + φ 0 v 2 ω 2 = A 2 × sin 2 ω t + φ 0
x 2 + v 2 ω 2 = А 2 .
x 2 А 2 + v 2 v 2 m a x = 1 .
x 1 2 + v 1 2 ω 2 = А 2 x 2 2 + v 2 2 ω 2 = А 2
Преобразовав выражения и подставив значения, данные в условиях задачи, получаем:
ω = v 2 2 — v 1 2 x 1 2 — x 2 2 = 2 c — 1 ;
A = x 1 2 v 2 2 — x 2 2 v 1 2 v 1 2 — v 2 2 ≈ 5 , 57 с м ;
v = ω 2 π ≈ 0 , 32 Г ц .
Необходимо вычислить циклическую частоту колебаний точки, если известно, что при скорости 13 см/с ускорение равнялось 6 с м / с 2 , а при уменьшении скорости до 12 см/с произошло увеличение ускорения до 10 с м / с 2 .
Решение:
Координата точки меняется по закону
Запишем уравнения скорости и ускорения точки:
v x = — A × ω × sin ω t a x = — A × ω 2 × cos ω t ⇒ v x A ω = — sin ω t a x A ω 2 = — cos ω t ⇒ v 2 ω 2 + a 2 ω 4 = A 2 .
Преобразуем уравнение, исключив из него А, и подставим значения, данные в условиях задачи:
ω = a 2 2 — a 1 2 v 1 2 — v 2 2 = 1 , 6 c — 1 .
Практическое применение математического маятника
С помощью математического моделирования динамических систем можно обнаружить схожесть динамических процессов в реальных физических, технических, биологических, химических и социально-экономических системах. Разработка моделей, позволяющих предсказывать время и другие характеристики периодических процессов в этих системах, является эффективным способом анализировать, например, сельскохозяйственные или производственно-экономические процессы.
Формулы математического маятника
Определение и формулы математического маятника
Математический маятник — это колебательная система, являющаяся частным случаем физического маятника, вся масса которого сосредоточена в одной точке, центре масс маятника.
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник — классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
где $varphi $ — угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $varphi (t):$
где $alpha $ — начальная фаза колебаний; $_0$ — амплитуда колебаний; $_0$ — циклическая частота.
Колебания гармонического осциллятора — это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
Период колебаний математического маятника ($T$) в этом случае равен:
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
где $E_k$ — кинетическая энергия маятника; $E_p$ — потенциальная энергия маятника; $v$ — скорость движения маятника; $x$ — линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол — смещение связан с $x$ как:
Максимальное значение потенциальной энергии математического маятника равно:
Максимальная величина кинетической энергии:
где $h_m$ — максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m=_0x_m$ — максимальная скорость.
Примеры задач с решением
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
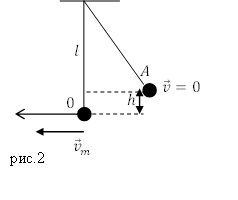
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
Из уравнения (1.1) найдем искомую высоту:
Ответ. $h=frac$
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1 м$, совершает колебания с периодом равным $T=2 с$? Считайте колебания математического маятника малыми.textit
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
Выразим из нее ускорение:
Проведем вычисления ускорения силы тяжести:
Ответ. $g=9,87 frac$
1.1. Уравнение гармонических колебаний
В этом разделе мы покажем, что уравнения колебательного движения многих систем, в сущности, одинаковы, так что различные физические процессы могут быть описаны одними и теми же математическими формулами.
Пружинный маятник — это система, состоящая из шарика массой m, подвешенного на пружине длиной  .
.

Рис. 1.2. К выводу уравнения движения для пружинного маятника
В положении равновесия (рис. 1.2) сила тяжести  уравновешивается упругой силой
уравновешивается упругой силой  :
:


где  – статическое удлинение пружины. Направим ось x вниз и выберем начало отсчета так, что координата x = 0 соответствует положению неподвижного шарика в положении равновесия.
– статическое удлинение пружины. Направим ось x вниз и выберем начало отсчета так, что координата x = 0 соответствует положению неподвижного шарика в положении равновесия.
Если теперь оттянуть шарик от положения равновесия на расстояние x, то полное удлинение пружины станет равным  . По закону Гука проекция результирующей силы на ось ОХ будет тогда равна
. По закону Гука проекция результирующей силы на ось ОХ будет тогда равна



Знак минус означает, что сила стремится уменьшить отклонение от положения равновесия. Полученное выражение соответствует упругой силе слабо деформированной пружины.
Запишем теперь уравнение второго закона Ньютона:

Его можно также представить в виде:

Математический маятник
Математический маятник — это идеализированная система, состоящая из невесомой и нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной точке.
Будем характеризовать отклонение маятника от положения равновесия углом  , который образует нить с вертикалью (рис. 1.3).
, который образует нить с вертикалью (рис. 1.3).

Рис. 1.3. К выводу уравнения движения математического маятника
При отклонении маятника от положения равновесия на материальную точку массой m действуют сила тяжести  и сила натяжения нити
и сила натяжения нити  . Соответственно, уравнение движения этой материальной точки имеет вид
. Соответственно, уравнение движения этой материальной точки имеет вид
 .
.
Проецируя его на направления нормали и касательной к траектории (окружности радиуса  ), получаем
), получаем

Модуль скорости  равен
равен  , учитывая, что при движении точки к положению равновесия угол убывает, а скорость точки растет, напишем
, учитывая, что при движении точки к положению равновесия угол убывает, а скорость точки растет, напишем
 .
.
Тогда второе из написанных выше уравнений движения приобретает вид

При малых отклонениях маятника от вертикали, когда  ,
,


Физический маятник
Физический маятник — это протяженное колеблющееся тело, закрепленное на оси. Его размеры таковы, что его невозможно рассматривать как материальную точку.
Пример физического маятника приведен на рис. 1.4.

Рис. 1.4. К выводу уравнения движения физического маятника
При отклонении маятника от положения равновесия на угол  возникает вращательный момент, стремящийся вернуть маятник в положение равновесия. Этот момент равен
возникает вращательный момент, стремящийся вернуть маятник в положение равновесия. Этот момент равен

где m – масса маятника, а l – расстояние 0C между точкой подвеса 0 и центром масс C маятника.

Рассматривая как вектор, связанный с направлением поворота правилом правого винта, противоположность знаков  и можно объяснить тем, что векторы
и можно объяснить тем, что векторы  и
и  направлены в противоположные стороны. Обозначив момент инерции маятника относительно оси, проходящей через точку подвеса, как I, для маятника можно записать основное уравнение динамики вращательного движения:
направлены в противоположные стороны. Обозначив момент инерции маятника относительно оси, проходящей через точку подвеса, как I, для маятника можно записать основное уравнение динамики вращательного движения:

Ограничимся рассмотрением малых отклонений от положения равновесия:

В этом случае уравнение колебаний принимает вид:

В случае, когда физический маятник можно представить как материальную точку, колеблющуюся на нити длиной l, момент инерции равен

и мы приходим к уравнению (1.6) движения математического маятника.
Колебания поршня в сосуде с идеальным газом
Рассмотрим цилиндр с площадью поперечного сечения  , в который вставлен поршень массы
, в который вставлен поршень массы  (рис. 1.5). Под поршнем в цилиндре идеальный газ с показателем адиабаты
(рис. 1.5). Под поршнем в цилиндре идеальный газ с показателем адиабаты  , над поршнем воздух с постоянным (атмосферным) давлением
, над поршнем воздух с постоянным (атмосферным) давлением  . Поршень может двигаться в цилиндре вверх и вниз без трения. Будем считать, что в равновесии объем идеального газа под поршнем равен
. Поршень может двигаться в цилиндре вверх и вниз без трения. Будем считать, что в равновесии объем идеального газа под поршнем равен  и изменения объема газа, обусловленные движением поршня, происходят адиабатно, то есть без теплообмена со стенками цилиндра и поршнем.
и изменения объема газа, обусловленные движением поршня, происходят адиабатно, то есть без теплообмена со стенками цилиндра и поршнем.

Рис. 1.5. Колебания поршня, закрывающего сосуд с идеальным газом
В состоянии равновесия давление в газе под поршнем складывается из атмосферного давления  и давления
и давления  , оказываемого поршнем. Обозначим это результирующее давление
, оказываемого поршнем. Обозначим это результирующее давление  :
:

Переместим поршень на расстояние x вверх. Объем сосуда увеличится и станет равным

Соответственно уменьшится давление. В силу предположения об отсутствии теплообмена, новое давление в газе можно найти из уравнения адиабаты Пуассона


Здесь  — показатель адиабаты, зависящий от числа степеней свободы молекул газа.
— показатель адиабаты, зависящий от числа степеней свободы молекул газа.
При малых колебаниях, когда изменение объема газа  много меньше его «равновесной» величины
много меньше его «равновесной» величины  , то есть когда
, то есть когда

выражение (1.11) можно разложить в ряд Тейлора:

На поршень действуют три силы: сила атмосферного давления  , сила давления газа под поршнем
, сила давления газа под поршнем  и сила тяжести
и сила тяжести  . Знаки сил соответствуют выбору положительного направления оси x вверх. Используя (1.10) и (1.12), находим для равнодействующей
. Знаки сил соответствуют выбору положительного направления оси x вверх. Используя (1.10) и (1.12), находим для равнодействующей  этих сил:
этих сил:

Используя (1.13), уравнение движения поршня