Доброго времени суток. В этой статье мы разберем решение простых нелинейных уравнений с помощью средств Matlab. Посмотрим в действии как стандартные функции, так и сами запрограммируем три распространенных метода для решения нелинейных уравнений.
- Общая информация
- Стандартные функции Matlab
- Метод перебора Matlab
- Метод простых итераций Matlab
- Метод половинного деления Matlab
- Заключение
- fsolve
- Syntax
- Description
- Examples
- Solution of 2-D Nonlinear System
- Solution with Nondefault Options
- Solve Parameterized Equation
- Solve a Problem Structure
- Solution Process of Nonlinear System
- Examine Matrix Equation Solution
- Input Arguments
- fun — Nonlinear equations to solve function handle | function name
- x0 — Initial point real vector | real array
- options — Optimization options output of optimoptions | structure as optimset returns
Общая информация
Уравнения, которые содержат переменные, находящиеся в степенях, отличающихся от единицы, или имеющие нелинейные математические выражения (корень, экспонента, логарифм, синус, косинус и т.д.), а также имеющие вид f(x) = 0 называются нелинейными. В зависимости от сложности такого уравнения применяют методы для решения нелинейных уравнений.
В этой статье, помимо стандартных функций Matlab, мы рассмотрим следующие методы:
- Метод перебора
- Метод простых итераций
- Метод половинного деления
Рассмотрим коротко их алгоритмы и применим для решения конкретной задачи.
Стандартные функции Matlab
Для решения нелинейных уравнений в Matlab есть функция fzero. Она принимает в качестве аргументов саму функцию, которую решаем, и отрезок, на котором происходит поиск корней нелинейного уравнения.
И сразу же разберем пример:
Решить нелинейное уравнение x = exp(-x), предварительно определив интервалы, на которых существуют решения уравнения.
Итак, для начала следует привести уравнение к нужному виду: x — exp(-x) = 0 , а затем определить интервалы, в которых будем искать решение уравнения. Методов для определения интервалов множество, но так как пример достаточно прост мы воспользуемся графическим методом.
Здесь задали примерные границы по оси x, чтобы можно было построить график и посмотреть как ведет себя функция. Вот график: 
Из графика видно, что на отрезке [0;1] есть корень уравнения (там, где y = 0), соответственно в дальнейшем будем использовать этот интервал. Чем точнее выбран интервал, тем быстрее метод придет к решению уравнения, а для сложных уравнений правильный выбор интервала определяет погрешность, с которой будет получен ответ.
С помощью стандартной функции Matlab находим корень нелинейного уравнения и выводим. Теперь для проверки отобразим все это графически:

Как вы видите, все достаточно точно просчиталось. Теперь мы исследуем эту же функцию с помощью других методов и сравним полученные результаты.
Метод перебора Matlab
Самый простой метод, который заключается в том, что сначала задается какое то приближение x (желательно слева от предполагаемого корня) и значение шага h. Затем, пока выполняется условие f(x) * f(x + h) > 0, значение x увеличивается на значение шага x = x + h. Как только условие перестало выполняться — это значит, что решение нелинейного уравнения находится на интервале [x; x + h].
Теперь реализуем метод перебора в Matlab:
Лучше всего создать новый m-файл, в котором и прописать код. После вызова получаем такой вывод:
Функцию объявляем с помощью очень полезной команды inline, в цикле пока выполняется условие отсутствия корней (или их четного количества), прибавляем к x значение шага. Очевидно, что чем точнее начальное приближение, тем меньше итераций необходимо затратить.
Метод простых итераций Matlab
Этот метод заключается в том, что функцию преобразуют к виду: x = g(x). Эти преобразования можно сделать разными способами, в зависимости от вида начальной функции. Помимо этого следует задать интервал, в котором и будет производиться итерационный процесс, а также начальное приближение. Сам процесс строится по схеме xn= g(xn-1). То есть итерационно проходим от предыдущего значения к последующему.
Процесс заканчивается как только выполнится условие:  , то есть, как только будет достигнута заданная точность. И сразу же разберем реализацию метода простых итераций в Matlab для примера, который был приведен выше.
, то есть, как только будет достигнута заданная точность. И сразу же разберем реализацию метода простых итераций в Matlab для примера, который был приведен выше.
Здесь должно быть все понятно, кроме одного: зачем задавать число итераций? Это нужно для того, чтобы программа не зацикливалась и не выполняла ненужные итерации, а также потому что не всегда программа может просчитать решение с нужной точностью — поэтому следует ограничивать число итераций.
А вот и вывод программы:
Очевидно, что метод простых итераций работает гораздо быстрее и получает точное решение.
Метод половинного деления Matlab
Метод достаточно прост: существует отрезок поиска решения [a;b], сначала находят значение функции в точке середины c, где c = (a+b)/2. Затем сравнивают знаки f(a) и f(c). Если знаки разные — то решение находится на отрезке [a;c], если нет — то решение находится на отрезке [c;b]. Таким образом мы сократили область в 2 раза. Такое сокращение происходит и дальше, пока не достигнем заданной точности.
Перейдем к реализации метода в Matlab:
Все самое важное происходит в цикле: последовательно сокращаем область нахождения решения, пока не будет достигнута заданная точность.
Вот что получилось в выводе:
Этот метод хорошо работает, когда правильно определен интервал, на котором находится решение. Тем не менее, метод простых итераций считается наиболее точным и быстрым.
Заключение
Сегодня мы рассмотрели решение нелинейных уравнений в Matlab. Теперь нам известны методы перебора, половинного деления, простых итераций. А также, когда нам не важно реализация метода, то можно использовать стандартную функцию в Matlab.
На этом все — спасибо за внимание. В следующей статье мы разберем решение систем нелинейных уравнений в matlab.
fsolve
Solve system of nonlinear equations
Syntax
Description
Nonlinear system solver
Solves a problem specified by
for x, where F( x) is a function that returns a vector value.
x is a vector or a matrix; see Matrix Arguments.
x = fsolve( fun , x0 ) starts at x0 and tries to solve the equations fun(x) = 0, an array of zeros.
Note
Passing Extra Parameters explains how to pass extra parameters to the vector function fun(x) , if necessary. See Solve Parameterized Equation.
x = fsolve( fun , x0 , options ) solves the equations with the optimization options specified in options . Use optimoptions to set these options.
x = fsolve( problem ) solves problem , a structure described in problem .
[ x , fval ] = fsolve( ___ ) , for any syntax, returns the value of the objective function fun at the solution x .
[ x , fval , exitflag , output ] = fsolve( ___ ) additionally returns a value exitflag that describes the exit condition of fsolve , and a structure output with information about the optimization process.
[ x , fval , exitflag , output , jacobian ] = fsolve( ___ ) returns the Jacobian of fun at the solution x .
Examples
Solution of 2-D Nonlinear System
This example shows how to solve two nonlinear equations in two variables. The equations are

Convert the equations to the form  .
.

Write a function that computes the left-hand side of these two equations.
Save this code as a file named root2d.m on your MATLAB® path.
Solve the system of equations starting at the point [0,0] .
Solution with Nondefault Options
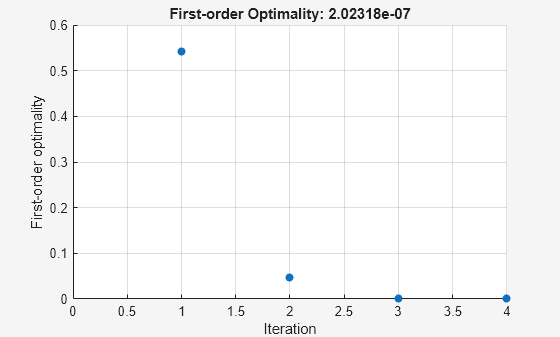
Examine the solution process for a nonlinear system.
Set options to have no display and a plot function that displays the first-order optimality, which should converge to 0 as the algorithm iterates.
The equations in the nonlinear system are

Convert the equations to the form  .
.

Write a function that computes the left-hand side of these two equations.
Save this code as a file named root2d.m on your MATLAB® path.
Solve the nonlinear system starting from the point [0,0] and observe the solution process.
Solve Parameterized Equation
You can parameterize equations as described in the topic Passing Extra Parameters. For example, the paramfun helper function at the end of this example creates the following equation system parameterized by c :
2 x 1 + x 2 = exp ( c x 1 ) — x 1 + 2 x 2 = exp ( c x 2 ) .
To solve the system for a particular value, in this case c = — 1 , set c in the workspace and create an anonymous function in x from paramfun .
Solve the system starting from the point x0 = [0 1] .
To solve for a different value of c , enter c in the workspace and create the fun function again, so it has the new c value.
This code creates the paramfun helper function.
Solve a Problem Structure
Create a problem structure for fsolve and solve the problem.
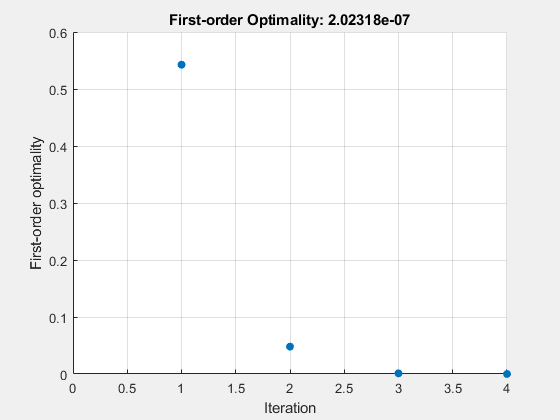
Solve the same problem as in Solution with Nondefault Options, but formulate the problem using a problem structure.
Set options for the problem to have no display and a plot function that displays the first-order optimality, which should converge to 0 as the algorithm iterates.
The equations in the nonlinear system are

Convert the equations to the form  .
.

Write a function that computes the left-hand side of these two equations.
Save this code as a file named root2d.m on your MATLAB® path.
Create the remaining fields in the problem structure.
Solve the problem.
Solution Process of Nonlinear System
This example returns the iterative display showing the solution process for the system of two equations and two unknowns
2 x 1 — x 2 = e — x 1 — x 1 + 2 x 2 = e — x 2 .
Rewrite the equations in the form F ( x ) = 0 :
2 x 1 — x 2 — e — x 1 = 0 — x 1 + 2 x 2 — e — x 2 = 0 .
Start your search for a solution at x0 = [-5 -5] .
First, write a function that computes F , the values of the equations at x .
Create the initial point x0 .
Set options to return iterative display.
Solve the equations.
The iterative display shows f(x) , which is the square of the norm of the function F(x) . This value decreases to near zero as the iterations proceed. The first-order optimality measure likewise decreases to near zero as the iterations proceed. These entries show the convergence of the iterations to a solution. For the meanings of the other entries, see Iterative Display.
The fval output gives the function value F(x) , which should be zero at a solution (to within the FunctionTolerance tolerance).
Examine Matrix Equation Solution
Find a matrix X that satisfies
X * X * X = [ 1 2 3 4 ] ,
starting at the point x0 = [1,1;1,1] . Create an anonymous function that calculates the matrix equation and create the point x0 .
Set options to have no display.
Examine the fsolve outputs to see the solution quality and process.
The exit flag value 1 indicates that the solution is reliable. To verify this manually, calculate the residual (sum of squares of fval) to see how close it is to zero.
This small residual confirms that x is a solution.
You can see in the output structure how many iterations and function evaluations fsolve performed to find the solution.
Input Arguments
fun — Nonlinear equations to solve
function handle | function name
Nonlinear equations to solve, specified as a function handle or function name. fun is a function that accepts a vector x and returns a vector F , the nonlinear equations evaluated at x . The equations to solve are F = 0 for all components of F . The function fun can be specified as a function handle for a file
where myfun is a MATLAB ® function such as
fun can also be a function handle for an anonymous function.
fsolve passes x to your objective function in the shape of the x0 argument. For example, if x0 is a 5-by-3 array, then fsolve passes x to fun as a 5-by-3 array.
If the Jacobian can also be computed and the ‘SpecifyObjectiveGradient’ option is true , set by
the function fun must return, in a second output argument, the Jacobian value J , a matrix, at x .
If fun returns a vector (matrix) of m components and x has length n , where n is the length of x0 , the Jacobian J is an m -by- n matrix where J(i,j) is the partial derivative of F(i) with respect to x(j) . (The Jacobian J is the transpose of the gradient of F .)
Example: fun = @(x)x*x*x-[1,2;3,4]
Data Types: char | function_handle | string
x0 — Initial point
real vector | real array
Initial point, specified as a real vector or real array. fsolve uses the number of elements in and size of x0 to determine the number and size of variables that fun accepts.
Example: x0 = [1,2,3,4]
Data Types: double
options — Optimization options
output of optimoptions | structure as optimset returns
Optimization options, specified as the output of optimoptions or a structure such as optimset returns.
Some options apply to all algorithms, and others are relevant for particular algorithms. See Optimization Options Reference for detailed information.
Some options are absent from the optimoptions display. These options appear in italics in the following table. For details, see View Options.
| All Algorithms | |
| Algorithm | |
| CheckGradients | Compare user-supplied derivatives (gradients of objective or constraints) to finite-differencing derivatives. The choices are true or the default false . For optimset , the name is DerivativeCheck and the values are ‘on’ or ‘off’ . See Current and Legacy Option Names. |
| Diagnostics | |
| DiffMaxChange | |
| DiffMinChange | |
| FiniteDifferenceStepSize | |
| FiniteDifferenceType | |
| FunctionTolerance | |
| FunValCheck | |
| MaxFunctionEvaluations | |
| MaxIterations | |
| OptimalityTolerance | |
| SpecifyObjectiveGradient | |
| StepTolerance | |
| UseParallel | |
| trust-region Algorithm | |
| JacobianMultiplyFcn | |
| JacobPattern | |
| MaxPCGIter | |
| PrecondBandWidth | |
| SubproblemAlgorithm | |
| Levenberg-Marquardt Algorithm | |
| InitDamping | |
| ScaleProblem | |