Решение систем линейных уравнений
Пример: решить систему линейных уравнений
Решение возможно одним из способов (s1, s2, s3 или s4 – см. приведенную ниже программу).
—> a=[2, 1, 0, 1; 1, -3, 2, 4; -5, 0, -1, -7; 1, -6, 2, 6]; b=[8 9 -5 0];
8.1481481 — 1.5185185 11.703704 — 6.7777778
8.1481481 — 1.5185185 11.703704 — 6.7777778
8.1481481 — 1.5185185 11.703704 — 6.7777778
Решить систему линейных уравнений вида  можно с помощью функции linsolve : linsolve(a,b). В нашем примере:
можно с помощью функции linsolve : linsolve(a,b). В нашем примере:
a=[2, 1, 0, 1; 1, -3, 2, 4; -5, 0, -1, -7; 1, -6, 2, 6]; b=[8; 9 ;-5 ;0]; x=linsolve(a,-b)
Если система уравнений имеет бесчисленное множество решений, то выводится одно из них:
a=[2, 1; 4, 2]; b=[-7; -14 ];x=linsolve(a,b)
Если система не имеет решений:
a=[2, 1; 4, 2]; b=[-7; -13 ];x=linsolve(a,b)
WARNING:Conflicting linear constraints!
Вычисление корней полинома
Функция roots(c) возвращает вектор-столбец из корней полинома с.
Пример: решить уравнение 
Примечание: Коэффициенты полинома следует вводить в порядке убывания степеней переменной x. Если в уравнении отсутствует слагаемое, содержащее, например, x 2 , то в векторе коэффициентов на соответствующем месте надо ввести 0.
Решение нелинейных уравнений вида f(x)=0
Уравнения бывают алгебраическими и трансцендентными. Алгебраическим называют уравнение вида  . Если уравнение нельзя свести к алгебраическому заменой переменных, то его называют трансцендентным. Пример:
. Если уравнение нельзя свести к алгебраическому заменой переменных, то его называют трансцендентным. Пример: 
Для решения уравнений, в том числе трансцендентных, в Scilab применяют функцию fsolve(x0,f)
где x0 — начальное приближение, f — функция, описывающая левую часть уравнения f(x)=0.
Пример: решить уравнение 
Набираем в окне редактора файл:
и сохраняем его под именем f.sci.Загружаем его в Scilab(Execute/Load into Scilab).
Для нахождения отрезка [a, b], на котором отделен корень данного уравнения, построим график функции  .
.
—>x=-8:0.1:-5; plot(x, f(x)); xgrid() 
Из графика видно, что корень отделен на отрезке [-6.5 , -6]. Найдем его, используя функциюfsolve:
Систему нелинейных уравнений также можно решить, используя функцию fsolve.

Поиск минимума функции y=f(x) на интервале [a, b]
Функция [f1,xopt]=optim(costf,x0) возвращает локальный минимум функции costf.
Функция возвращает минимум функции (значение f1) и точку, в которой этот минимум достигается (xopt).
Главной особенностью функции optim является структура функции costf, которая должна быть такой:
function [f,g,ind]=costf(x,ind)
f=gg(x);//функция, минимум которой мы ищем
g=numdiff(gg,x); //градиент функции f
Endfunction
Если возвращаемое сформированной функцией costf значение ind равно 2, 3 или 4, то функция costf обеспечивает поиск минимума, т.е. в качестве результата функции optim возвращается f и xopt. Если ind=1, то в функции optim ничего не считается, условие ind
Пример: найти минимум функции  .
.
Решение. Построим график функции для определения интервалов [a, b], на которых находятся экстремумы этой функции.
Из графика видно, что это отрезок [1, 2]. Набираем в окне редактора и отправляем на выполнение файл
Как решать нелинейные уравнения в scilab
—>p2^(-1) //Возведение в отрицательную степень
Функция roots ( p ) предназначена для решения алгебраического уравнения.
Здесь p — это полином, созданный функцией poly и представляющий собой левую часть уравнения P(x) = 0.
Решим несколько алгебраических уравнений.
Задача 7.1 . Найти корни полинома 2x 4 − 8x 3 + 8x 2 − 1 = 0.
Для решения этой задачи необходимо задать полином p . Сделаем это при помощи функции poly, предварительно определив вектор коэффициентов V . В уравнении отсутствует переменная x в первой степени, это означает, что соответствующий коэффициент равен нулю:
Листинг 7.4 . Формирование полинома
1 + 8x 2 — 8x 3 + 2x 4
Теперь найдем корни полинома:
Листинг 7.5. Использование функции roots
Графическое решение задачи позволяет убедиться, что корни найдены верно.
Пересечение графиков функций F( x )= 1 + 8x 2 — 8x 3 + 2x 4 и g ( x )=0

Задача 7.2. Найти корни полинома x 3 + 0.4x 2 + 0.6x − 1 = 0.
Листинг 7.6. Решение задачи 7.2
Нетрудно заметить, что полином имеет один действительный и два комплексных корня.
Задача 7.3. Найти решение уравнения y(x) = 0, если y(x) = x 4 − 18x 2 + 6.
Листинг 7.7. Решение задачи 7.3
Приведите графическое решение данного уравнения.
Уравнение f(x) = 0, в котором неизвестное входит в аргумент трансцендентных функций, называется трансцендентным уравнением .
К трансцендентным уравнениям принадлежат показательные, логарифмические и тригонометрические.
В общем случае аналитическое решение уравнения f(x) = 0 можно найти только для узкого класса функций. Чаще всего приходится решать это уравнение численными методами.
Численное решение нелинейного уравнения проводят в два этапа.
- В начале отделяют корни уравнения, т.е. находят достаточно тесные промежутки, в которых содержится только один корень. Эти промежутки называют интервалами изоляции корня , определить их можно, изобразив график функции f(x) или любым другим методом.
- На втором этапе проводят уточнение отделенных корней, или, иначе говоря, находят корни с заданной точностью.
Для решения трансцендентных уравнений в Scilab применяют функцию
где x0 — начальное приближение, f — функция, описывающая левую часть уравнения y(x) = 0.
Рассмотрим применение этой функции на примерах.
Задача 7.4. Найти решение уравнения
Определим интервал изоляции корня заданного уравнения. Воспользуемся графическим методом отделения корней. Если выражение, стоящее в правой части уравнения, представить в виде разности двух функций f (x) − g(x) = 0 , то абсцисса точки пересечения линий f(x) и g(x) — корень данного уравнения. В нашем случае .
Корень данного уравнения лежит в интервале [0; 1].
Выберем ноль в качестве начального приближения, зададим функцию, описывающую уравнение и решим его:
Листинг 7.8. Решение задачи 7.4
Задача 7.5. Найти корни уравнения f(x) = e x /5 − 2(x − 1) 2 .
На рисунке видно, что график функции f(x) трижды пересекает ось абсцисс, т.е. уравнение имеет три корня.
Последовательно вызывая функцию fsolve с различными начальными приближениями, получим все решения заданного уравнения:
Листинг 7.9. Решение задачи 7.5
Кроме того, начальные приближения можно задать в виде вектора, и тогда функцию можно вызвать один раз:
Листинг 7.10. Решение задачи 7.5 (альтернативный способ)
Задача 7.6. Вычислить корни уравнения sin(x) − 0.4x = 0 в диапазоне [−5π; 5π].
Решение задачи представлено в листинге 7.11.
Листинг 7.11 . Решение задачи 7.6
—>X //Множество решений
X = !-16.11948 -12.154854 -9.8362948 -5.8716685 -3.5531095
0.4115168 2.7300758 6.6947022 9.0132611 12.977887 15.296446!
Задача 7.7. Найти решение уравнения y(x) = 0, если y(x) = x 5 − x 3 + 1.
Вычисление интегралов, решение уравнений и систем
Краткие теоретические сведения
В Scilab вычисление определенного интеграла методом трапеций реализовано функцией
где x –вектор значений аргумента подынтегральной функции на отрезке интегрирования, y –вектор значений, полученных при вычислении подынтегральной функции для элементов вектора x.
Например, для вычисления  нужно выполнить следующий набор команд:
нужно выполнить следующий набор команд:
| Фрагмент программы x=2:0.01:5.3 y =2*x./(sin(x)+1.5) integral = inttrap(x,y)disp(integral) | Результат 30.436962 |
Для вычисления определенного интеграла с использованием алгоритма квадратурных формул предназначена функция
Integrate(fun, x, a, b, ,er1 ,er2),
где fun– подынтегральная функция в символьном виде, x – переменная интегрирования в символьном виде, a, b –пределы интегрирования, er1,er2 –абсолютная и относительная погрешности интегрирования (необязательные параметры).
Например, для вычисления  нужно задать:
нужно задать:
| Фрагмент программы z=integrate(‘2*x./(sin(x)+1.5)’, ‘x’, 2, 5.3)disp(z) | Результат 30.437056 |
Универсальная команда интегрирования:
[integral,err]=intg(a, b, name ,er1,er2),
где a, b –пределы интегрирования, name – имя подынтегральной функции (может быть задана с помощью внешней функции), er1,er2 –абсолютная и относительная погрешности интегрирования (необязательные параметры). Функция intgвозвращает значение интеграла (integral) и погрешность вычислений (err).
Внешнюю функцию можно задать командой
deff(‘переменная=имя функции(параметр)’, ‘символьное представление функции’) Например, deff(‘y=F(x)’, ‘y=2*x./(sin(x)+1.5)’).или
function переменная = имя функции(параметр-аргумент функции)
операторы, вычисляющие значение функции
endfunctionНапример, function y=f(t) y=t^2/sqrt(3+sin(t)) endfunctionилиfunction y=f(t),y=t^2/sqrt(3+sin(t)),endfunction
Ниже приводится пример вычисления интеграла  .
.
| Фрагмент программы function y=f(x) y=2*x./(sin(x)+1.5)endfunctionz=intg(2,5.3,f), disp(z) | Результат 30.437056 |
Для решения нелинейных уравнений в Scilab используется функция
где x0 –начальное приближение корня, f– функция, описывающая левую часть уравнения f(x)=0.
Например, для решения уравнения  для начального приближения
для начального приближения  нужно выполнить следующие команды:
нужно выполнить следующие команды:
| Фрагмент программы deff(‘y=F(x)’, ‘y=sin(2*x)-cos(3*x.^2)-sin(3*x)’)root=fsolve(7,F)disp(root) | Результат 6.9755674 |
Для решения полиномиальных уравнений вида  используется функция
используется функция
где а – вектор коэффициентов перед неизвестными полинома размерностью n+1(n – порядок полинома).
Результатом работы этой функции будет вектор корней полинома размерностью n.
Пример решения полиномиального уравнения  приведен ниже.
приведен ниже.
| Фрагмент программы v=[3 1 -10 -8]R=roots(v)disp(R) | Результат 2. -1.3333333 — 1. |
Для уравнения  два корня – комплексные.
два корня – комплексные.
| Фрагмент программы v=[3 1 -10 8]R=roots(v)disp(R) | Результат — 2.2935835 0.9801251 + 0.4494650i 0.9801251 — 0.4494650i |
Функция rootsможет также принимать в качестве параметра полином, созданный функциейpolyи представляющий собой левую часть уравнения  :
:
где a –вектор коэффициентов полинома записанных в обратном порядке, x — символьная переменная, f1– символьная переменная, принимающая значения ‘c’ или ‘r’ (roots или coeff).
Например, чтобы создать полином  , нужно использовать команду
, нужно использовать команду
| Фрагмент программы p=poly([3 -2 1 0 4],’x’,’c’)disp(p) | Результат  |
Для решения уравнения  можно выполнить следующие команды:
можно выполнить следующие команды:
| Фрагмент программы p=poly([-8 -10 1 3],’x’,’c’)R=roots(p)disp(R) | Результат 2. — 1.3333333 — 1. |
Для решения систем линейных уравнений в Scilab есть следующие способы:
— применение операции левого матричного деления;
— использование обратной матрицы.
Если задана система линейных алгебраических уравнений вида:
где А – матрица коэффициентов перед неизвестными системы, В – вектор свободных членов, то решение системы может быть найдено в виде:
То же самое решение может быть получено с помощью обратной матрицы, например:
Например, решить систему уравнений
| Фрагмент программы A=[3 1;-3 5]; B=[-4 ;36]; X=inv(A)*B, disp(X)илиX1=AB , disp(X1) | Результат — 3.1111111 5.3333333 |
Для решения систем нелинейных уравнений можно использовать функцию
где x0 –вектор начальных приближений для неизвестных, f –функция, определяющая систему
Например, решение системы  можно выполнить следующим образом:
можно выполнить следующим образом:
| Фрагмент программы function [y]=fun(x) y(1)=2*x(1)+x(2)-6 y(2)=x(1)^2+x(2)^2-14endfunctionX0=[1;1]R=fsolve(X0,fun)disp(R) | Результат 1.2338096 3.5323808 |
Задание 1. Вычисление определенного интеграла
Постановка задачи. Вычислить числовое значение интеграла от этой функции в заданных пределах интегрирования методом трапеций, методом квадратурных формул и с помощью функции intg.

Шаг 1. Создадим вектор X, значения которого будут изменяться от 2,1 до 4,3 с шагом 0.01.
Шаг 2. Создадим вектор Y, каждое значение которого вычисляется по формуле  .
.
Шаг 3. Применим команду inttrap(X, Y).
Шаг 4. Используем функцию integrate,задав подынтегральную функцию в символьном виде.
Шаг 5. Определим внешнюю функцию с помощью команды deffили конструкции function
Шаг 6. Выведем результаты, используя команду disp.
| Программа | Результат выполнения |
| X =2.1:0.01:4.3 Y =sin(X)/1.5 integral_1 = inttrap(X,Y)integral_2=integrate(‘sin(x)/1.5’, ‘x’, 2.1, 4.3)disp(integral_1)disp(integral_2) | — 0.0693640 — 0.0693646 |
| deff(‘y=F(x)’,’y=sin(x)/1.5′); integral_3=intg(2.1,4.3,F)function y=f(x) y=sin(x)/1.5endfunctionintegral_4=intg(2.1,4.3,f)disp(integral_3)disp(integral_4) | — 0.0693646 — 0.0693646 |
Индивидуальные задания приведены в таблице 3.4.
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
Задание 2. Поиск корней уравнения, графическая интерпретация
Постановка задачи. Найти корень уравнения для заданного начального приближения. Выполнить графическую интерпретацию результата.
 |  |
Шаг 1. Определим внешнюю функцию с помощью команды deffили конструкции function
Шаг 2. Найдем корень уравнения с помощью функции fsolve,подставив в качестве первого параметра заданное начальное приближение.
Шаг 3. Выведем результат, используя команду disp.
Шаг 4. Выполним графическую интерпретацию результата. Для этого зададим аргумент функции из левой части уравнения таким образом, чтобы найденный корень попадал в диапазон между первым и последним элементом вектора. Построим график функции из левой части уравнения с помощью plot.Построим также линию y=0 и отметим точку с абсциссой, равной корню, и ординатой, равной значению функции для корня.
| Программа | Результат выполнения |
| deff(‘y=F(x)’, …’y=sin(x)-cos(x.^2)-sin(2*x)’)root=fsolve(1,F)disp(root)x=0.5:0.01:2.5plot(x,F(x),’-b’,root,F(root),’xr’,x,0,’-k’) | 1.1695683 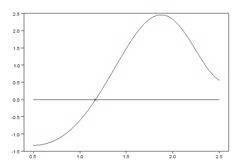 |
Индивидуальные задания приведены в таблице 3.5
| Вариант | Уравнение | Начальноеприближение |
| 1. |  |  |
| 2. |  |  |
| 3. |  |  |
| 4. |  |  |
| 5. |  | |
| 6. |  |  |
| 7. |  | |
| 8. |  | |
| 9. |  | |
| 10. |  | |
| 11. |  |  |
| 12. |  |  |
| 13. |  | |
| 14. |  | |
| 15. |  | |
Задание 3. Поиск корней полиномиального уравнения, графическая интерпретация
Постановка задачи. Найти все корни полиномиального уравнения. Выполнить графическую интерпретацию для одного из найденных действительных корней.

Шаг 1. Создадим вектор коэффициентов полинома в левой части уравнения (или полином с помощью poly)
Шаг 2. Найдем корни уравнения с помощью функции roots.
Шаг 3. Выведем результат, используя команду disp.
Шаг 4. Выполним графическую интерпретацию результата. Для этого зададим аргумент функции из левой части уравнения таким образом, чтобы выбранный действительный корень попадал в диапазон между первым и последним элементом вектора. Построим график функции из левой части уравнения с помощью plot.Построим также линию y=0 и отметим точку с абсциссой, равной корню, и ординатой, равной значению функции для корня.
| Программа | Результат выполнения |
| v=[2 0 4 -6 -3]R=roots(v)disp(R)root=R(3)x=0.5:0.01:2y=2*x.^4+4*x.^2-6*x-3F_root=2*root^4+4*root^2-6*root-3plot(x,y,’-b’,root,F_root,’xr’,x,0,’-k’) | — 0.4129576 + 1.7282075i — 0.4129576 — 1.7282075i 1.2164706 — 0.3905555 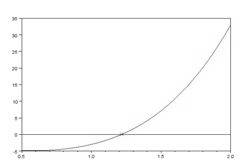 |
Индивидуальные задания приведены в таблице 3.6.
| Вариант | Уравнение |
| 1. |  |
| 2. |  |
| 3. |  |
| 4. |  |
| 5. |  |
| 6. |  |
| 7. |  |
| 8. |  |
| 9. |  |
| 10. |  |
| 11. |  |
| 12. |  |
| 13. |  |
| 14. |  |
| 15. |  |
Задание 4. Решение системы линейных уравнений
Постановка задачи. Решить систему линейных уравнений.
Шаг 1. Создадим матрицу коэффициентов при неизвестных
Шаг 2. Создадим вектор свободных членов.
Шаг 3. Умножим матрицу, обратную к матрице коэффициентов, на вектор свободных членов (или применим операцию левого матричного деления).
Шаг 4. Выведем результат, используя команду disp.
| Программа | Результат выполнения |
| A=[3 1 1;-3 5 6;1 -4 -2]; B=[-4 ;36;-19]; X=inv(A)*B disp(X) | — 3. 3. 2. |
Индивидуальные задания приведены в таблице 3.7.
| № | Система уравнений | № | Система уравнений |
| 1. |  | 2. |  |
| 3. |  | 4. |  |
| 5. |  | 6. |  |
| 7. |  | 8. |  |
| 9. |  | 10. |  |
| 11. |  | 12. |  |
| 13. |  | 14. |  |
| 15. |  | 16. |  |
Статьи к прочтению:
Метод Крамера за 3 минуты. Решение системы линейных уравнений — bezbotvy
Похожие статьи:
Приближенное вычисление интегралов Приближённое вычисление определённого интеграла основано на геометрическом смысле интеграла и сводится к приближённому…
Задание: графически и численно решить систему нелинейных алгебраических уравнений, на примере поиска точек пересечения двух функций. Исходные данные:…