Содержание:
- Преобразования декартовой системы координат
- Параллельный перенос и поворот системы координат
- Полярные координаты. Замечательные кривые
- Полярная система координат: основные понятия и примеры
- Полярная система координат: основные понятия и обозначения
- Связь полярных координат с декартововыми координатами
- Задачи о точках в полярной системе координат
- Полярная система координат — справочник студента
- Полярная система координат
- Спираль Архимеда
- Кардиоида
- Задача и её решение
- Системы координат на плоскости: прямоугольная декартова и полярная, связь между координатами. Двухмерные системы координат
- 1.2.2. Полярная и сферическая системы координат
- Декартова и полярная системы координат
- Полярная система координат
- Сборник задач по алгебре
- Полярные и биполярные координаты
Преобразования декартовой системы координат
Параллельный перенос и поворот системы координат
1. Параллельный перенос системы координат. Пусть на плоскости две декартовы системы координат, причем соответствующие оси параллельны и сонаправлены (Рис.46):
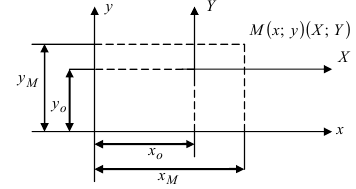
Рис. 46. Параллельный перенос одной системы координат относительно другой системы.
Систему координат 
Пример:
Дана точка М(3;2) и начало новой системы координат  Вычислить положение точки М в новой системе отсчета.
Вычислить положение точки М в новой системе отсчета.
Решение:
Используя формулы, определяющие параллельный перенос одной системы отсчета относительно другой, получим  Следовательно, точка М в новой системе отсчета имеет координаты М(4; -1).
Следовательно, точка М в новой системе отсчета имеет координаты М(4; -1).
2. Поворот системы координат. Пусть даны две системы координат (старая и новая), имеющие общее начало отсчета и повернутые относительно друг друга на угол  (Рис. 47):
(Рис. 47): 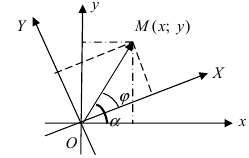
Рис. 47. Поворот одной системы координат относительно другой системы с общим началом координат двух систем.
Получим формулы, связывающие старые и новые координаты произвольной точки М(х; у). Из рисунка видно, что в новой системе координат координаты точки равны  а координаты этой точки в старой системе координат равны
а координаты этой точки в старой системе координат равны  Таким образом формулы перехода от новых координат произвольной точки М к старым имеет вид
Таким образом формулы перехода от новых координат произвольной точки М к старым имеет вид  В матричном виде эти равенства можно записать в виде
В матричном виде эти равенства можно записать в виде  где матрица перехода
где матрица перехода 
Найдем обратное преобразование системы координат, найдем матрицу  обратную к матрице А:
обратную к матрице А: 
Найдем алгебраические дополнения всех элементов
 Запишем обратную матрицу
Запишем обратную матрицу 
Определение: Унитарными преобразованиями называются такие преобразования, для которых определитель матрицы преобразования равен 1.
Определение: Ортогональными преобразованиями называются такие преобразования, для которых обратная матрица к матрице преобразования совпадает с транспонированной матрицей преобразования.
Таким образом, имеем  Следовательно, формулы перехода от старой системы отсчета к новой системе отсчета имеют вид:
Следовательно, формулы перехода от старой системы отсчета к новой системе отсчета имеют вид:
Пример:
Найти координаты точки М(1; 2) в новой системе координат, повернутой относительно старой системы отсчета на угол 
Решение:
Воспользуемся полученными формулами  т.е. в новой системе координат точка имеет координаты М(2; -1).
т.е. в новой системе координат точка имеет координаты М(2; -1).
Рассмотрим применение преобразования координат:
а) Преобразовать уравнение параболы  к каноническому виду. Проведем параллельный перенос системы координат
к каноническому виду. Проведем параллельный перенос системы координат  получим
получим  Выберем начало отсчета новой системы координат так, чтобы выполнялись равенства
Выберем начало отсчета новой системы координат так, чтобы выполнялись равенства 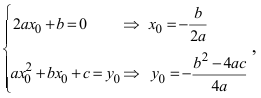 тогда уравнение принимает вид
тогда уравнение принимает вид  Выполним поворот системы координат на угол
Выполним поворот системы координат на угол  тогда
тогда  Подставим найденные соотношения в уравнение параболы
Подставим найденные соотношения в уравнение параболы  где параметр параболы
где параметр параболы 
Пример:
Преобразовать уравнение параболы  к каноническому виду.
к каноническому виду.
Решение:
Найдем начало отсчета новой системы координат после параллельного переноса  т.е. точка
т.е. точка  — начало координат новой системы отсчета. В этой системе уравнение параболы имеет вид
— начало координат новой системы отсчета. В этой системе уравнение параболы имеет вид  Проведем поворот системы отсчета на угол
Проведем поворот системы отсчета на угол  тогда
тогда
 следовательно, параметр параболы р = 1/4.
следовательно, параметр параболы р = 1/4.
б) Выяснить, какую кривую описывает функция 
Проведем следующее преобразование  Производя параллельный перенос системы координат, вводя обозначение
Производя параллельный перенос системы координат, вводя обозначение
 и новые координаты
и новые координаты  получим уравнение
получим уравнение  которое описывает равнобочную гиперболу.
которое описывает равнобочную гиперболу.
Полярные координаты. Замечательные кривые
Пусть полярная ось совпадает с осью абсцисс Ох, а начало полярной оси (полюс полярной системы координат) совпадает с началом координат декартовой системы отсчета (Рис. 48). Любая точка М(х;у) в полярной системе координат характеризуется длиной радиус-вектора, соединяющего эту точку с началом отсчета и углом  между радиус-вектором и полярной осью (угол отсчитывается против часовой стрелки).
между радиус-вектором и полярной осью (угол отсчитывается против часовой стрелки). 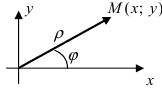
Рис. 48. Полярная система координат.
Главными значениями угла  являются значения, лежащие в интервале
являются значения, лежащие в интервале  Из рисунка видно, что декартовы и полярные координаты связаны формулами
Из рисунка видно, что декартовы и полярные координаты связаны формулами 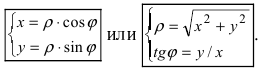
Рассмотрим замечательные кривые в полярной системе координат:
1. Спираль Архимеда  где число
где число  (Рис. 49). Для построения кривой в полярной системе координат, разобьем декартову плоскость лучами с шагом по углу
(Рис. 49). Для построения кривой в полярной системе координат, разобьем декартову плоскость лучами с шагом по углу  и на каждом луче отложим ему соответствующее значение р.
и на каждом луче отложим ему соответствующее значение р. 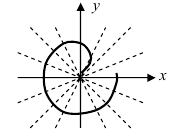
Рис. 49. Спираль (улитка) Архимеда.
2. Уравнение окружности: уравнение  описывает окружность с центром в точке A(R; 0) и радиусом R (Рис. 50). В полярной системе координат уравнение принимает вид
описывает окружность с центром в точке A(R; 0) и радиусом R (Рис. 50). В полярной системе координат уравнение принимает вид 
Рис. 50. Окружность с центром в точке A(R; 0) и радиусом R.
3. Уравнение  описывает окружность с центром в т. А(0; R) и радиусом R (Рис. 51). В полярной системе координат уравнение принимает вид
описывает окружность с центром в т. А(0; R) и радиусом R (Рис. 51). В полярной системе координат уравнение принимает вид
Рис. 51. Окружность с центром в точке А(0; R) и радиусом R.
4. Кардиоиды: 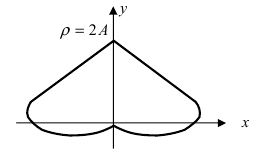
Рис. 52. Кардиоида 
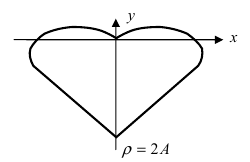
Рис. 53. Кардиоида 
Аналогично выглядят кардиоиды  но они вытянуты вдоль оси абсцисс Ох.
но они вытянуты вдоль оси абсцисс Ох.
5. Петля:  Величина
Величина  равна нулю при
равна нулю при 
Для первого корня у = 0, а для второго и третьего — у = 9 . Следовательно, петля имеет вид 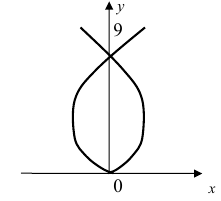
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Бесконечно малые и бесконечно большие функции
- Замечательные пределы
- Непрерывность функций и точки разрыва
- Точки разрыва и их классификация
- Экстремум функции
- Методы решения систем линейных алгебраических уравнений (СЛАУ)
- Скалярное произведение и его свойства
- Векторное и смешанное произведения векторов
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Telegram и логотип telegram являются товарными знаками корпорации Telegram FZ-LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Полярная система координат: основные понятия и примеры
Полярная система координат: основные понятия и обозначения
Если уж речь зашла о полярной системе координат, то вообразите себя полярниками, стоящими на Северном полюсе. Или на Южном (это не так важно). Пусть в точке полюса находится начало линейки. В точку полюса также положим начало карандаша, а весь карандаш полностью прилегает к линейке. Теперь повернём карандаш так, чтобы его начало оставалось там же, на полюсе, а между ним и линейкой образовался некоторый угол поворота. Конец карандаша оказался в некоторой точке, назовём её M. Вот мы и получили полярные координаты точки M: длина карандаша и угол, на который был повёрнут карандаш. А теперь об этом же в более строгих и точных определениях.
Полярная система координат определяется заданием некоторой точки O, называемой полюсом, исходящего из этой точки луча OA (обозначается также и как Ox), называемого полярной осью, и масштаба для изменения длин. Кроме того, при задании полярной системы координат должно быть определено, какие повороты вокруг точки O считаются положительными (на чертежах обычно положительными считаются повороты против часовой стрелки).

Итак, выберем на плоскости (рисунок выше) некоторую точку O (полюс) и некоторый выходящий из неё луч Ox. Кроме того, укажем единицу масштаба. Полярными координатами точки M называются два числа ρ и φ, первое из которых (полярный радиус ρ) равно расстоянию точки M от полюса O, а второе (полярный угол φ, который называют также амплитудой) — угол, на который нужно повернуть против часовой стрелки луч Ox до совмещения с лучом OM.
Точку M с полярными координатами ρ и φ обозначают символом M(ρ, φ) .
Связь полярных координат с декартововыми координатами
Установим связь между полярными координатами точки и её декартовыми координатами. Будем предполагать, что начало декартовой прямоугольной системы координат находится в полюсе, а положительная полуось абсцисс совпадает с полярной осью. Пусть точка M имеет декартовы координаты x и y и полярные координаты ρ и φ.Тогда
Полярные координаты ρ и φ точки M определяются по её декартовым координатам следующим образом:
 .
.
Для того, чтобы найти величину угла φ, нужно, используя знаки x и y, определить квадрант, в котором находится точка M, и, кроме того, воспользоваться тем, что тангенс угла φ равен  .
.
Приведённые выше формулы называются формулами перехода от декартовых координат к полярным.
Одно из наиболее частых применений полярных координат в высшей математике — решения двойных интегралов в полярных координатах.
Задачи о точках в полярной системе координат
Пример 1. В полярной системе координат на плоскости даны точки
Найти полярные координаты точек, симметричных этим точкам относительно полярной оси.
Решение. При симметрии длина луча не меняется. Следовательно, первая координата — длина луча — у симметричной относительно полярной оси точки будет как и у данной точки. Как видно из рисунка в начале урока, при построении симметричной относительно полярной оси точки данную точку нужно повернуть вокруг полярной оси на тот же угол φ. Следовательно, в полярной системе координат второй координатой симметричной точки будет угол для исходной точки, взятый с противоположным знаком, то есть -φ. Итак, полярные координаты точки, симметричной данной относительно полярной оси будут отличаться лишь второй координатой, и эта координата будет с противоположным знаком. Полярные координаты искомых симметричных точек будут следующими:
Пример 2. В полярной системе координат на плоскости даны точки
Найти полярные координаты точек, симметричных этим точкам относительно полюса.
Решение. При симметрии длина луча не меняется. Следовательно, первая координата — длина луча — у симметричной относительно полюса точки будет как и у данной точки. Симметричная относительно полюса точка получается вращением исходной точки на 180 градусов против часовой стрелки, то есть на угол π. Следовательно, вторая координата точки, симметричной данной относительно полюса рассчитывается как φ + π (если в результате получится числитель больше знаменателя, то вычтем из полученного числа один полный оборот, то есть 2π). Получаем следующие координаты точек, симметричных данным относительно полюса:
Пример 3. Полюс полярной системы координат совпадает с началом декартовых прямоугольных координат, а полярная ось совпадает с положительной полуосью абсцисс. В полярной системе координат даны точки
Найти декартовы координаты этих точек.
Решение. Используем формулы перехода от полярных координат к декартовым:
Получаем следующие декартовы координаты данных точек:
Пример 4. Полюс полярной системы координат совпадает с началом декартовых прямоугольных координат, а полярная ось совпадает с положительной полуосью абсцисс. В декартовой прямоугольной системе координат даны точки
Найти полярные координаты этих точек.
Решение. Определяем первую из полярных координат по формуле , а тангенс угла φ — второй из полярных координат как . Получаем следующие полярные координаты данных точек:
Полярная система координат — справочник студента
Полярная система координат — это система координат, в которой каждая точка на плоскости определяется двумя параметрами — полярный угол и полярный радиус.

Прямоугольная (или декартова в честь Декарта) система координат — это система координат, в которой две взаимно перпендикулярные оси ОX (осью абсцисс) и ОY (ось ординат), имеющие одинаковую масштабную единицу и общее начало О.
М(x;y) — произвольная точка

Пусть M – произвольная точка плоскости, x, y – её прямоугольные координаты,
а ρ (полярное расстояние), φ (полярный угол) – полярные координаты (рисунок ниже).

x = ρcosφ
y = ρsinφ

Таким образом получаем следующие уравнения

Пример 1
Прямоугольные координаты точки равны x=4, y=-4. Найти её полярные координаты.
Решение 
Значит

так как точка лежит в четвёртой четверти, то первое значение правильно.
Главное значение φ есть -π/4.

Полярная система координат
Полярная система координат на плоскости вводится при помощи полярной оси (начало координат называется полюсом) и угла поворота этой оси (положительным считается направление против часовой стрелки) (рис. 1)

Координаты точки в такой системе выглядят . Если не ограничивать значения и , тогда точки совпадают, то есть, между множеством точек плоскости и множеством пар числе нет взаимно однозначного соответствия. Для того, чтобы такое соответствие существовало, нужно рассмотреть так званые главные значения полярных координат, то есть, , . Дальше рассматриваются только такие значения.
Связь между полярными и прямоугольными (декартовыми) координатами легко понять из рис. 2, а именно,
- (1)
- и наоборот, полярные координаты выражаются через прямоугольные
- =
- (2>

- Рис. 2
- Чтобы найти во (2), учитываем совпадение знаков и , а также и .
- Наведём графики некоторых линий в полярных координатах.
Пусть луч выходит с полюса под углом к полярной оси. Тогда уравнение луча (рис. 3).

Общее уравнение круга с центром в и радиусом имеет вид:
- Это уравнение может быть упрощено для отдельных случаев, например,
- Или по-другому: радиуса , центр которого в полюсе имеет уравнение:
- .
Спираль Архимеда
Имеет такой вид: , где – заданное действительное число.

Кардиоида

- Розами называются линии, которые задаются уравнением:
- или ,
- где и – дополнительные числа.
Так как , , тогда из уравнений получается, что , а это означает, что вся линия расположена в середине круга радиуса .
Функция – периодическая и её график складывается из одинаковых лепестков, каждая из которых симметрична относительно наибольшего значения полярного радиуса . Количество лепестков зависит от числа :
при – целом и непарном роза складывается из лепестков (см. рис. 6);
при – целом и парном роза складывается из лепестков (см. рис. 7):
Задача и её решение
Задача
Построить в полярных координатах график функции , записав таблицу значений в градусах с шагом в . Перейти в уравнение к декартовым координатам.
Решение
Заполним таблицу значений аргумента и функции .
- За данными таблицы строим точки в полярной системе координат и соединяем их плавной линией.
- Перейдём в уравнение от полярных координат к декартовым при помощи формулы перехода (1) и (2)
- – это круг.
- Чтобы найти центр и радиус круга, выделим главный квадрат:
- .
Центр круга в точке , радиус (см. рис. 8)
- Рис. 8
- Для построения графика провели лучи под соответствующими углами: . На каждом из лучей откладывается соответствующее значение , которое бралось из таблицы:
- .
Системы координат на плоскости: прямоугольная декартова и полярная, связь между координатами. Двухмерные системы координат
 Проект Карла III Ребане и хорошей компании |
Раздел недели: Тепловые величины: теплоемкость, теплопроводность, температуры кипения, плавления, пламени…

|
 (x, y) — декартовы координаты точки M; х — абсцисса, y — ордината
(x, y) — декартовы координаты точки M; х — абсцисса, y — ордината


 1
1
 2
2


 .
.
