Доброго времени суток! В этой статье мы поговорим о решении систем нелинейных алгебраических уравнений в Matlab. Вслед за решением нелинейных уравнений, переходим к их системам, рассмотрим несколько методов реализации в Matlab.
- Общая информация
- Оператор Matlab для решения СНАУ
- Метод простых итераций в Matlab для решения СНАУ
- Метод Ньютона в Matlab для решения СНАУ
- Заключение
- 32. Решение в численном виде — функция fsolve
- fsolve
- Syntax
- Description
- Examples
- Solution of 2-D Nonlinear System
- Solution with Nondefault Options
- Solve Parameterized Equation
- Solve a Problem Structure
- Solution Process of Nonlinear System
- Examine Matrix Equation Solution
- Input Arguments
- fun — Nonlinear equations to solve function handle | function name
- x0 — Initial point real vector | real array
- options — Optimization options output of optimoptions | structure as optimset returns
Общая информация
Итак, в прошлой статье мы рассмотрели нелинейные уравнения и теперь необходимо решить системы таких уравнений. Система представляет собой набор нелинейных уравнений (их может быть два или более), для которых иногда возможно найти решение, которое будет подходить ко всем уравнениям в системе. 
В стандартном виде, количество неизвестных переменных равно количеству уравнений в системе. Необходимо найти набор неизвестных переменных, которые при подставлении в уравнения будут приближать значение уравнения к 0. Иногда таких наборов может быть несколько, даже бесконечно много, а иногда решений не существует.
Чтобы решить СНАУ, необходимо воспользоваться итеративными методами. Это методы, которые за определенное количество шагов получают решение с определенной точностью. Также очень важно при решении задать достаточно близкое начальное приближение, то есть такой набор переменных, которые близки к решению. Если решается система из 2 уравнений, то приближение находится с помощью построение графика двух функций.
Далее, мы рассмотрим стандартный оператор Matlab для решения систем нелинейных алгебраических уравнений, а также напишем метод простых итераций и метод Ньютона.
Оператор Matlab для решения СНАУ
В среде Matlab существует оператор fsolve, который позволяет решить систему нелинейных уравнений. Сразу рассмотрим задачу, которую, забегая вперед, решим и другими методами для проверки.
Решить систему нелинейных уравнений с точность 10 -2 :
cos(x-1) + y = 0.5
x-cos(y) = 3
Нам дана система из 2 нелинейных уравнений и сначала лучше всего построить график. Воспользуемся командой ezplot в Matlab, только не забудем преобразовать уравнения к стандартному виду, где правая часть равна 0:
Функция ezplot строит график, принимая символьную запись уравнения, а для задания цвета и толщины линии воспользуемся функцией set. Посмотрим на вывод: 
Как видно из графика, есть одно пересечение функций — то есть одно единственное решение данной системы нелинейных уравнений. И, как было сказано, по графику найдем приближение. Возьмем его как (3.0, 1.0). Теперь найдем решение с его помощью:
Создадим функцию m-файлом fun.m и поместим туда следующий код:
Заметьте, что эта функция принимает вектор приближений и возвращает вектор значений функции. То есть, вместо x здесь x(1), а вместо y — x(2). Это необходимо, потому что fsolve работает с векторами, а не с отдельными переменными.
И наконец, допишем функцию fsolve к коду построения графика таким образом:
Таким образом у нас образуется два m-файла. Первый строит график и вызывает функцию fsolve, а второй необходим для расчета самих значений функций. Если вы что-то не поняли, то в конце статьи будут исходники.
И в конце, приведем результаты:
xr (это вектор решений) =
3.3559 1.2069
fr (это значения функций при таких xr, они должны быть близки к 0) =
1.0e-09 *
0.5420 0.6829
ex (параметр сходимости, если он равен 1, то все сошлось) =
1
И, как же без графика с ответом: 
Метод простых итераций в Matlab для решения СНАУ
Теперь переходим к методам, которые запрограммируем сами. Первый из них — метод простых итераций. Он заключается в том, что итеративно приближается к решению, конечно же, с заданной точностью. Алгоритм метода достаточно прост:
- Если возможно, строим график.
- Из каждого уравнения выражаем неизвестную переменную след. образом: из 1 уравнения выражаем x1, из второго — x2, и т.д.
- Выбираем начальное приближение X0, например (3.0 1.0)
- Рассчитываем значение x1, x2. xn, которые получили на шаге 2, подставив значения из приближения X0.
- Проверяем условие сходимости, (X-X0) должно быть меньше точности
- Если 5 пункт не выполнился, то повторяем 4 пункт.
И перейдем к практике, тут станет все понятнее.
Решить систему нелинейных уравнений методом простых итераций с точность 10 -2 :
cos(x-1) + y = 0.5
x-cos(y) = 3
График мы уже строили в предыдущем пункте, поэтому переходим к преобразованию. Увидим, что x из первого уравнения выразить сложно, поэтому поменяем местами уравнения, это не повлияет на решение:
x-cos(y) = 3
cos(x-1) + y = 0.5
Далее приведем код в Matlab:
В этой части мы выразили x1 и x2 (у нас это ‘x’ и ‘y’) и задали точность.
В этой части в цикле выполняются пункты 4-6. То есть итеративно меняются значения x и y, пока отличия от предыдущего значения не станет меньше заданной точности.
k = 10
x = 3.3587
y = 1.2088
Как видно, результаты немного отличаются от предыдущего пункта. Это связано с заданной точностью, можете попробовать поменять точность и увидите, что результаты станут такими же, как и при решении стандартным методом Matlab.
Метод Ньютона в Matlab для решения СНАУ
Решение систем нелинейных уравнений в Matlab методом Ньютона является более эффективным, чем использование метода простых итераций. Сразу же представим алгоритм, а затем перейдем к реализации.
- Если возможно, строим график.
- Выбираем начальное приближение X0, например (3.0 1.0)
- Рассчитываем матрицу Якоби w, это матрица частных производных каждого уравнения, считаем ее определитель для X0.
- Находим вектор приращений, который рассчитывается как dx = -w -1 * f(X0)
- Находим вектор решения X = X0 + dx
- Проверяем условие сходимости, (X-X0) должно быть меньше точности
Далее, решим тот же пример, что и в предыдущих пунктах. Его график мы уже строили и начальное приближение останется таким же.
Решить систему нелинейных уравнений методом Ньютона с точность 10 -2 :
cos(x-1) + y = 0.5
x-cos(y) = 3
Перейдем к коду:
Сначала зададим начальное приближение. Затем необходимо просчитать матрицу Якоби, то есть частные производные по всем переменным. Воспользуемся символьным дифференцированием в Matlab, а именно командой diff с использованием символьных переменных.
Далее, сделаем первую итерацию метода, чтобы получить вектор выходных значений X, а потом уже сравнивать его с приближением в цикле.
В этой части кода выполняем первую итерацию, чтобы получить вектор решения и сравнивать его с вектором начального приближения. Отметим, чтобы посчитать значение символьной функции в Matlab, необходимо воспользоваться функцией subs. Эта функция заменяет переменную на числовое значение. Затем функция double рассчитает это числовое значение.
Все действия, которые были выполнены для расчета производных, на самом деле можно было не производить, а сразу же задать производные. Именно так мы и поступим в цикле.
В этой части кода выполняется цикл по расчету решения с заданной точностью. Еще раз отметим, что если в первой итерации до цикла были использованы функции diff, double и subs для вычисления производной в Matlab, то в самом цикле матрица якоби была явно задана этими частными производными. Это сделано, чтобы показать возможности среды Matlab.
За 3 итерации достигнут правильный результат. Также важно сказать, что иногда такие методы могут зацикливаться и не закончить расчеты. Чтобы такого не было, мы прописали проверку на количество итераций и запретили выполнение более 100 итераций.
Заключение
В этой статье мы познакомились с основными понятиями систем нелинейных алгебраических уравнений в Matlab. Рассмотрели несколько вариантов их решения, как стандартными операторами Matlab, так и запрограммированными методами простых итераций и Ньютона.
32. Решение в численном виде — функция fsolve
Для получения численного решения нелинейного уравнения или системы нелинейных уравнений в форме вещественных чисел удобно использовать функцию:
Эта функция может быть использована со следующими параметрами:
- complex — находит один или все корни полинома в комплексной форме;
- full digits — задает вычисления для полного числа цифр, заданного функцией Digits;
- maxsols=n — задает нахождение только n корней;
- interval — задается в виде а. .b или х=а. .b, или (х=а. .b, y=c. .d, . > и обеспечивает поиск корней в указанном интервале.
Функция fsolve дает решения сразу в форме вещественных или комплексных чисел, что и показывают следующие примеры:
Заметим, что локализация поиска корней в заданном интервале позволяет отыскивать такие решения, которые не удается получить с помощью функций solve и fsolve в обычном применении. В последнем из приведенных примеров дается решение системы нелинейных уравнений, представленных уравнениями f и д.
Чтобы еще раз показать различие между функциями solve и fsolve, рассмотрим пример решения с их помощью одного и того же уравнения erf(x) = 1/2:
Функция solve в этом случае находит нетривиальное решение в комплексной форме через функцию RootOf, тогда как функция fsolve находит обычное приближенное решение.
fsolve
Solve system of nonlinear equations
Syntax
Description
Nonlinear system solver
Solves a problem specified by
for x, where F( x) is a function that returns a vector value.
x is a vector or a matrix; see Matrix Arguments.
x = fsolve( fun , x0 ) starts at x0 and tries to solve the equations fun(x) = 0, an array of zeros.
Note
Passing Extra Parameters explains how to pass extra parameters to the vector function fun(x) , if necessary. See Solve Parameterized Equation.
x = fsolve( fun , x0 , options ) solves the equations with the optimization options specified in options . Use optimoptions to set these options.
x = fsolve( problem ) solves problem , a structure described in problem .
[ x , fval ] = fsolve( ___ ) , for any syntax, returns the value of the objective function fun at the solution x .
[ x , fval , exitflag , output ] = fsolve( ___ ) additionally returns a value exitflag that describes the exit condition of fsolve , and a structure output with information about the optimization process.
[ x , fval , exitflag , output , jacobian ] = fsolve( ___ ) returns the Jacobian of fun at the solution x .
Examples
Solution of 2-D Nonlinear System
This example shows how to solve two nonlinear equations in two variables. The equations are

Convert the equations to the form  .
.

Write a function that computes the left-hand side of these two equations.
Save this code as a file named root2d.m on your MATLAB® path.
Solve the system of equations starting at the point [0,0] .
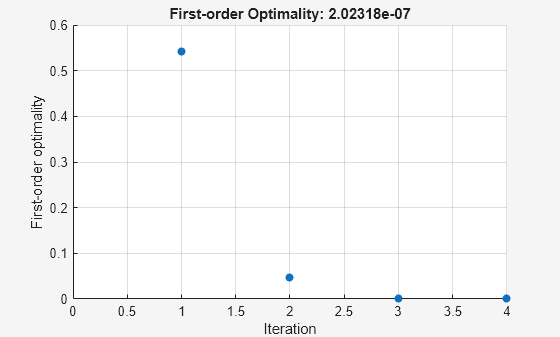
Solution with Nondefault Options
Examine the solution process for a nonlinear system.
Set options to have no display and a plot function that displays the first-order optimality, which should converge to 0 as the algorithm iterates.
The equations in the nonlinear system are

Convert the equations to the form  .
.

Write a function that computes the left-hand side of these two equations.
Save this code as a file named root2d.m on your MATLAB® path.
Solve the nonlinear system starting from the point [0,0] and observe the solution process.
Solve Parameterized Equation
You can parameterize equations as described in the topic Passing Extra Parameters. For example, the paramfun helper function at the end of this example creates the following equation system parameterized by c :
2 x 1 + x 2 = exp ( c x 1 ) — x 1 + 2 x 2 = exp ( c x 2 ) .
To solve the system for a particular value, in this case c = — 1 , set c in the workspace and create an anonymous function in x from paramfun .
Solve the system starting from the point x0 = [0 1] .
To solve for a different value of c , enter c in the workspace and create the fun function again, so it has the new c value.
This code creates the paramfun helper function.
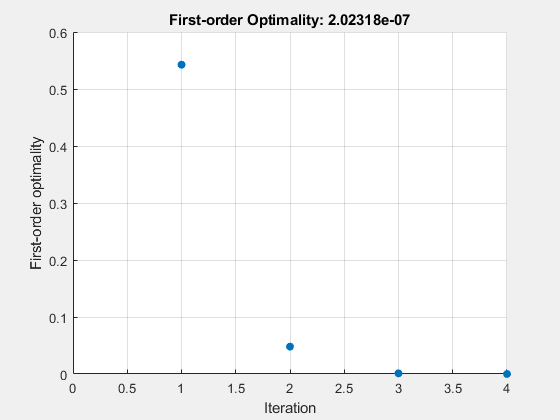
Solve a Problem Structure
Create a problem structure for fsolve and solve the problem.
Solve the same problem as in Solution with Nondefault Options, but formulate the problem using a problem structure.
Set options for the problem to have no display and a plot function that displays the first-order optimality, which should converge to 0 as the algorithm iterates.
The equations in the nonlinear system are

Convert the equations to the form  .
.

Write a function that computes the left-hand side of these two equations.
Save this code as a file named root2d.m on your MATLAB® path.
Create the remaining fields in the problem structure.
Solve the problem.
Solution Process of Nonlinear System
This example returns the iterative display showing the solution process for the system of two equations and two unknowns
2 x 1 — x 2 = e — x 1 — x 1 + 2 x 2 = e — x 2 .
Rewrite the equations in the form F ( x ) = 0 :
2 x 1 — x 2 — e — x 1 = 0 — x 1 + 2 x 2 — e — x 2 = 0 .
Start your search for a solution at x0 = [-5 -5] .
First, write a function that computes F , the values of the equations at x .
Create the initial point x0 .
Set options to return iterative display.
Solve the equations.
The iterative display shows f(x) , which is the square of the norm of the function F(x) . This value decreases to near zero as the iterations proceed. The first-order optimality measure likewise decreases to near zero as the iterations proceed. These entries show the convergence of the iterations to a solution. For the meanings of the other entries, see Iterative Display.
The fval output gives the function value F(x) , which should be zero at a solution (to within the FunctionTolerance tolerance).
Examine Matrix Equation Solution
Find a matrix X that satisfies
X * X * X = [ 1 2 3 4 ] ,
starting at the point x0 = [1,1;1,1] . Create an anonymous function that calculates the matrix equation and create the point x0 .
Set options to have no display.
Examine the fsolve outputs to see the solution quality and process.
The exit flag value 1 indicates that the solution is reliable. To verify this manually, calculate the residual (sum of squares of fval) to see how close it is to zero.
This small residual confirms that x is a solution.
You can see in the output structure how many iterations and function evaluations fsolve performed to find the solution.
Input Arguments
fun — Nonlinear equations to solve
function handle | function name
Nonlinear equations to solve, specified as a function handle or function name. fun is a function that accepts a vector x and returns a vector F , the nonlinear equations evaluated at x . The equations to solve are F = 0 for all components of F . The function fun can be specified as a function handle for a file
where myfun is a MATLAB ® function such as
fun can also be a function handle for an anonymous function.
fsolve passes x to your objective function in the shape of the x0 argument. For example, if x0 is a 5-by-3 array, then fsolve passes x to fun as a 5-by-3 array.
If the Jacobian can also be computed and the ‘SpecifyObjectiveGradient’ option is true , set by
the function fun must return, in a second output argument, the Jacobian value J , a matrix, at x .
If fun returns a vector (matrix) of m components and x has length n , where n is the length of x0 , the Jacobian J is an m -by- n matrix where J(i,j) is the partial derivative of F(i) with respect to x(j) . (The Jacobian J is the transpose of the gradient of F .)
Example: fun = @(x)x*x*x-[1,2;3,4]
Data Types: char | function_handle | string
x0 — Initial point
real vector | real array
Initial point, specified as a real vector or real array. fsolve uses the number of elements in and size of x0 to determine the number and size of variables that fun accepts.
Example: x0 = [1,2,3,4]
Data Types: double
options — Optimization options
output of optimoptions | structure as optimset returns
Optimization options, specified as the output of optimoptions or a structure such as optimset returns.
Some options apply to all algorithms, and others are relevant for particular algorithms. See Optimization Options Reference for detailed information.
Some options are absent from the optimoptions display. These options appear in italics in the following table. For details, see View Options.
| All Algorithms | |
| Algorithm | |
| CheckGradients | Compare user-supplied derivatives (gradients of objective or constraints) to finite-differencing derivatives. The choices are true or the default false . For optimset , the name is DerivativeCheck and the values are ‘on’ or ‘off’ . See Current and Legacy Option Names. |
| Diagnostics | |
| DiffMaxChange | |
| DiffMinChange | |
| FiniteDifferenceStepSize | |
| FiniteDifferenceType | |
| FunctionTolerance | |
| FunValCheck | |
| MaxFunctionEvaluations | |
| MaxIterations | |
| OptimalityTolerance | |
| SpecifyObjectiveGradient | |
| StepTolerance | |
| UseParallel | |
| trust-region Algorithm | |
| JacobianMultiplyFcn | |
| JacobPattern | |
| MaxPCGIter | |
| PrecondBandWidth | |
| SubproblemAlgorithm | |
| Levenberg-Marquardt Algorithm | |
| InitDamping | |
| ScaleProblem | |