Задача 2.1.
Движение точки задано уравнениями (х, у — в метрах, t — в секундах).
 .
.
Определить траекторию, скорость и ускорение точки.
Решение.
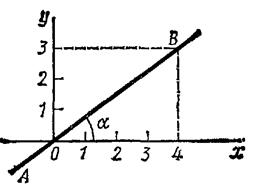 |
| Рис. 2.9. К задаче 2.1 |
Для определения траектории исключаем из уравнений движения время t. Умножая обе части первого уравнения на 3, а обе части второго — на 4 и почленно вычитая из первого равенства второе, получим:  или
или  .
.
Следовательно, траектория — прямая линия, наклоненная к оси Ох под углом α, где  (рис. 2.9).
(рис. 2.9).
Определяем скорость точки. По формулам (2.1) получаем:
 ;
;
 .
.
Теперь находим ускорение точки. Формулы (2.1) дают:

Направлены векторы  и
и  вдоль траектории, т. е. вдоль прямой АВ. Проекции ускорения на координатные оси все время отрицательны, следовательно, ускорение имеет постоянное направление от В к А. Проекции скорости при 0 1 с) обе проекции скорости отрицательны и, следовательно, скорость направлена от В к А, т. е. так же, как и ускорение.
вдоль траектории, т. е. вдоль прямой АВ. Проекции ускорения на координатные оси все время отрицательны, следовательно, ускорение имеет постоянное направление от В к А. Проекции скорости при 0 1 с) обе проекции скорости отрицательны и, следовательно, скорость направлена от В к А, т. е. так же, как и ускорение.
Заметим, наконец, что при 
 и
и  ; при
; при 
 (точка В); при
(точка В); при 
 ; при
; при  значения
значения  и
и  растут по модулю, оставаясь отрицательными.
растут по модулю, оставаясь отрицательными.
Итак, заданные в условиях задачи уравнения движения рассказывают нам всю историю движения точки. Движение начинается из точки О с начальной скоростью  и происходит вдоль прямой АВ, наклоненной к оси Ох под углом α, для которого . На участке OB точка движется замедленно (модуль ее скорости убывает) и через одну секунду приходит в положение В (4, 3), где скорость ее обращается в нуль. Отсюда начинается ускоренное движение в обратную сторону. В момент точка вновь оказывается в начале координат и дальше продолжает свое движение вдоль ОА, Ускорение точки все время равно 10 м/с 2 .
и происходит вдоль прямой АВ, наклоненной к оси Ох под углом α, для которого . На участке OB точка движется замедленно (модуль ее скорости убывает) и через одну секунду приходит в положение В (4, 3), где скорость ее обращается в нуль. Отсюда начинается ускоренное движение в обратную сторону. В момент точка вновь оказывается в начале координат и дальше продолжает свое движение вдоль ОА, Ускорение точки все время равно 10 м/с 2 .
Задача 2.2.
Движение точки задано уравнениями:

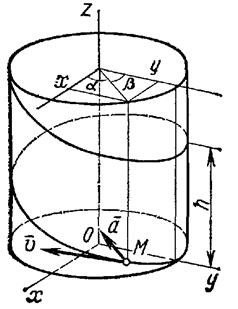
где  , ω и u — постоянные величины. Определить траекторию, скорость и ускорение точки.
, ω и u — постоянные величины. Определить траекторию, скорость и ускорение точки.
Решение.
 |
| Рис. 2.10. К задаче 2.2 |
Возводя первые два уравнения почленно в квадрат и складывая, получаем
 .
.
Следовательно, траектория лежит на круглом цилиндре радиуса R, ось которого направлена вдоль оси Oz (рис. 2.10). Определяя из последнего уравнения t и подставляя в первое, находим
 .
.
Таким образом, траекторией точки будет линия пересечения синусоидальной поверхности, образующие которой параллельны оси Оу (синусоидальный гофр) с цилиндрической поверхностью радиуса R. Эта кривая называется винтовой линией. Из уравнений движения видно, что один виток винтовой линий точка проходит за время  , определяемое из равенства
, определяемое из равенства  . При этом вдоль оси z точка за это время перемещается на величину
. При этом вдоль оси z точка за это время перемещается на величину  , называемую шагом винтовой линии.
, называемую шагом винтовой линии.
Найдем скорость и ускорение точки. Дифференцируя уравнения движения по времени, получаем:

 .
.
Стоящие под знаком радикала величины постоянны. Следовательно, движение происходит с постоянной по модулю скоростью, направленной по касательной к траектории. Теперь по формулам (2.1) вычисляем проекции ускорения;



 .
.
Итак, движение происходит с постоянным по модулю ускорением, Для определения направления ускорения имеем формулы:
 ,
,
 ’
’
 .
.
 ,
,
где α и β —углы, образуемые с осями Ох и Оу радиусом R, проведенным от оси цилиндра к движущейся точке. Так как косинусы углов α1 и β1 отличаются от косинусов α и β только знаками, то отсюда заключаем, что ускорение точки все время направлено по радиусу цилиндра к его оси.
Заметим, что хотя в данном случае движение и происходит со скоростью, постоянной по модулю, ускорение точки не равно нулю, так как направление скорости изменяется.
Задача 2.3.
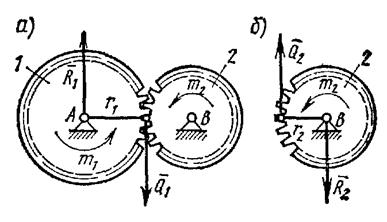
На шестерню 1 радиуса r1 действует пара сил с моментом m1 (рис. 46, а). Определить момент m2 пары, которую надо приложить к шестерне 2 радиуса r2, чтобы сохранить равновесие.
Решение.
 |
| Рис. 2.11. К задаче 2.3 |
Рассмотрим сначала условия равновесия шестерни 1. На нее действует пара с моментом m1, которая может быть уравновешена только действием другой пары, в данном случае пары  . Здесь
. Здесь  — перпендикулярная радиусу составляющая силы давления на зуб со стороны шестерни 2, a
— перпендикулярная радиусу составляющая силы давления на зуб со стороны шестерни 2, a  — тоже перпендикулярная радиусу составляющая реакции оси А (сила давления на зуб и реакция оси А имеют еще составляющие вдоль радиуса, которые взаимно уравновешиваются и в условие равновесия не войдут). При этом, согласно условию равновесия (17),
— тоже перпендикулярная радиусу составляющая реакции оси А (сила давления на зуб и реакция оси А имеют еще составляющие вдоль радиуса, которые взаимно уравновешиваются и в условие равновесия не войдут). При этом, согласно условию равновесия (17),  и
и  .
.
Теперь рассмотрим условия равновесия шестерни 2 (рис. 46, б). По закону равенства действия и противодействия на нее со стороны шестерни 1 будет действовать сила  , которая с перпендикулярной радиусу составляющей реакции оси В образует пару
, которая с перпендикулярной радиусу составляющей реакции оси В образует пару  ,
,  с моментом, равным -Q2r2. Эта пара и должна уравновеситься приложенной к шестерне 2 парой с моментом m2; следовательно, по условию равновесия,
с моментом, равным -Q2r2. Эта пара и должна уравновеситься приложенной к шестерне 2 парой с моментом m2; следовательно, по условию равновесия,  . Отсюда, так как Q2=Q1 находим m2=m1/r2r1.
. Отсюда, так как Q2=Q1 находим m2=m1/r2r1.
Естественно, что пары с моментами m1 и m2 не удовлетворяют условию равновесия , так как они приложены к разным телам.
Полученная в процессе решения задачи величина Q1 (или Q2) называется окружным усилием, действующим на шестерню. Как видим, окружное усилие равно моменту вращающей пары, деленному на радиус шестерни: Q1=m1/r1 =m2/r2.
Задача 2.4.
Человек ростом h удаляется от фонаря, висящего на высоте H, двигаясь прямолинейно со скоростью  . С какой скоростью движется конец тени человека?
. С какой скоростью движется конец тени человека?
Решение.
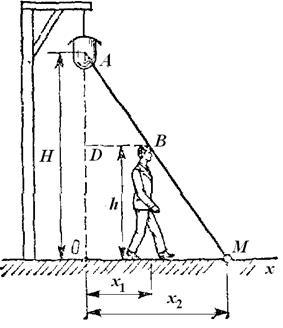 |
| Рис. 2.12. К задаче 2.4 |
Для решения задачи найдем сначала закон, по которому движется конец тени. Выбираем начало отсчета в точке О, находящейся на одной вертикали с фонарем, и направляем вдоль прямой, по которой движется конец тени, координатную ось Ох (рис. 2.12). Изображаем человека в произвольном положении на расстоянии x1 от точки О. Тогда конец его тени будет находиться от начала О на расстоянии х2.
Из подобия треугольников ОАМ и DAB находим:
 .
.
Это уравнение выражает закон движения конца тени М, если закон движения человека, т.е.  , известен.
, известен.
Взяв производную по времени от обеих частей равенства и замечая, что по формуле (2.1)  , где
, где  — искомая скорость, получим
— искомая скорость, получим
 .
.
Если человек движется с постоянной скоростью (  ), то скорость конца тени М будет тоже постоянна, но в
), то скорость конца тени М будет тоже постоянна, но в  раз больше, чем скорость человека.
раз больше, чем скорость человека.
Обращаем внимание на то, что при составлении уравнений движения надо изображать движущееся тело или механизм в произвольном положении. Только тогда мы поучим уравнения, определяющие положение движущейся точки (или тела) в любой момент времени.
Задача 2.5.
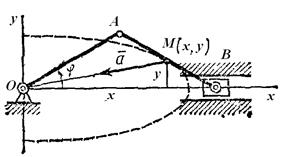
Определить траекторию, скорость и ускорение середины М шатуна кривошипно-ползунного механизма (рис. 2.13), если OA=AB=2b, а угол  при вращении кривошипа растет пропорционально времени:
при вращении кривошипа растет пропорционально времени:  .
.
 |
| Рис. 2.13. К задаче 2.5. |
Начинаем с определения уравнений движения точки М. Проводя оси и обозначая координаты точки М в произвольном положении через х и у находим
 .
.
Заменяя его значением, получаем уравнения движения точки М:
 .
.
Для определения траектории точки М представим уравнения движения в виде
 .
.
Возводя эти равенства почленно в квадрат и складывая, получим
 .
.
Итак, траектория точки М — эллипс с полуосями 3b и b.
Теперь по формуле (2.1) находим скорость точки М:

 .
.
Скорость оказывается величиной переменной, меняющейся с течением времени в пределах от  до
до  .
.
Далее по формулам (2.1) определяем проекции ускорения точки М;
 ;
;
 ,
,
где  — длина радиуса-вектора, проведанного из центра О до точки М. Следовательно, модуль ускорения точки меняется пропорционально ее расстояние от центра эллипса.
— длина радиуса-вектора, проведанного из центра О до точки М. Следовательно, модуль ускорения точки меняется пропорционально ее расстояние от центра эллипса.
Определелим направление ускорения

Отсюда находим, что ускорение точки М все время направлено вдоль МО к центру эллипса.
Задача 2.6.
Вал, делающий n=90 об/мин, после выключения двигателя начинает вращаться равнозамедленно и останавливается через t1=40 с. Определить, сколько оборотов сделал вал за это время.
Решение.
Так как вал вращается равнозамедленно, то для него, считая  , будет
, будет
 . (2.2)
. (2.2)
Начальной угловой скоростью при замедленном вращении является та, которую вал имел до выключения двигателя. Следовательно,
 .
.
В момент остановки при t=t1 угловая скорость вала ω1=0. Подставляя эти значения во второе из уравнений (2.2), получаем:
 и
и  .
.
Если обозначить число сделанных валом за время t1 оборотов через N (не смешивать с n; n — угловая скорость), то угол поворота за то же время будет равен  . Подставляя найденные значения ε и
. Подставляя найденные значения ε и  в первое из уравнений (а), получим
в первое из уравнений (а), получим
 ,
,
 .
.
Задача 2.7.
Маховик радиусом R=0,6 м вращается равномерно, делая n=90 об/мин. Определить скорость и ускорение точки, лежащей на ободе маховика.
Решение.
Скорость точки обода  , где угловая скорость
, где угловая скорость  должна быть выражена в радианах в секунду. Тогда
должна быть выражена в радианах в секунду. Тогда  и
и  .
.
Далее, так как  , то ε=0, и, следовательно,
, то ε=0, и, следовательно,
 .
.
Ускорение точки направлено в данном случае к оси вращения.
Задача 2.8.
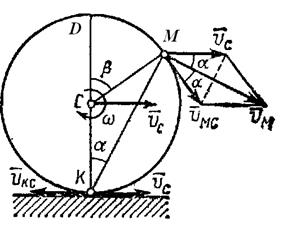
Найти скорость точки М обода колеса, катящегося по прямолинейному рельсу без скольжения (рис. 2.14), если скорость центра С колеса равна  , а угол DKM=α.
, а угол DKM=α.
 |
| Рис. 2.14. К задаче 2.8. |
Решение
Приняв точку С, скорость которой известна, за полюс, найдем, что  , где
, где  по модулю
по модулю  (
(  — радиус колеса). Значение угловой скорости со найдем из условия того, что точка
— радиус колеса). Значение угловой скорости со найдем из условия того, что точка  колеса не скользит по рельсу и, следовательно, в данный момент времени
колеса не скользит по рельсу и, следовательно, в данный момент времени  . С другой стороны, так же как и для точки М,
. С другой стороны, так же как и для точки М,  где
где  . Так как для точки К скорости
. Так как для точки К скорости  и
и  направлены вдоль одной прямой, то при
направлены вдоль одной прямой, то при  , откуда
, откуда  . В результате находим, что
. В результате находим, что  .
.
Параллелограмм, построенный на векторах  и
и  , будет при этом ромбом. Угол между и равен β, так как стороны, образующие этот угол и угол β, взаимно перпендикулярны. В свою очередь угол β=2α, как центральный угол, опирающийся на ту же дугу, что и вписанный угол α. Тогда по свойствам ромба углы между и
, будет при этом ромбом. Угол между и равен β, так как стороны, образующие этот угол и угол β, взаимно перпендикулярны. В свою очередь угол β=2α, как центральный угол, опирающийся на ту же дугу, что и вписанный угол α. Тогда по свойствам ромба углы между и  и между и тоже равны α. Окончательно, так как диагонали ромба взаимно перпендикулярны, получим
и между и тоже равны α. Окончательно, так как диагонали ромба взаимно перпендикулярны, получим
 и
и  .
.
Задача 2.9.
Определить скорость точки М обода катящегося колеса, рассмотренного в предыдущей задаче, с помощью мгновенного центра скоростей.
Решение.
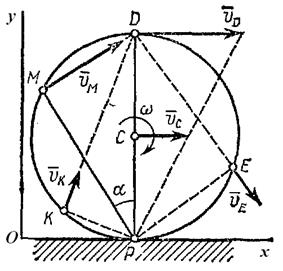 |
| Рис. 2.15. К задаче 2.9. |
Точка касания колеса Р (рис. 2.15) является мгновенным центром скоростей, поскольку  . Следовательно,
. Следовательно,  . Так как прямой угол PMD опирается на диаметр, то направление вектора скорости
. Так как прямой угол PMD опирается на диаметр, то направление вектора скорости  любой точки обода проходит через точку D. Составляя пропорцию
любой точки обода проходит через точку D. Составляя пропорцию  и замечая,
и замечая,
что  , a
, a  , находим
, находим  .
.
Чем точка М дальше от Р, тем ее скорость больше; наибольшую скорость  имеет верхний конец D вертикального диаметра. Угловая скорость колеса имеет значение
имеет верхний конец D вертикального диаметра. Угловая скорость колеса имеет значение

Аналогичная картина распределения скоростей имеет место при качении колеса или шестерни по любой цилиндрической поверхности.
Задача 2.10.
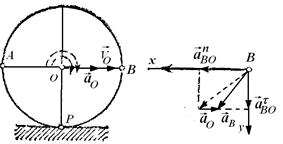
Центр О колеса, катящегося по прямолинейному рельсу (рис. 2.16), имеет в данный момент времени скорость  и ускорение
и ускорение  . Радиус колеса R=0,2 м. Определить ускорение точки В — конца перпендикулярного ОР диаметра АВ и ускорение точки Р, совпадающей с мгновенным центром скоростей.
. Радиус колеса R=0,2 м. Определить ускорение точки В — конца перпендикулярного ОР диаметра АВ и ускорение точки Р, совпадающей с мгновенным центром скоростей.
Решение.
 |
| Рис. 2.16. К задаче 2.10. |
1) Так как  и
и  известны, принимаем точку О за полюс.
известны, принимаем точку О за полюс.
2) Определение ω. Точка касания Р является мгновенным центром скоростей; следовательно, угловая скорость колеса
 .
.
3) Определение ε. Так как величина PO=R остается постоянной при любом положении колеса, то 
Знаки ω и ε совпадают, следовательно, вращение колеса ускоренное.
а) не следует думать, что если по условиям задачи , то  . Значение
. Значение  в задаче указано для данного момента времени; с течением же времени изменяется, так как
в задаче указано для данного момента времени; с течением же времени изменяется, так как  ;
;
б) в данном случае  , так как движение точки O является прямолинейным. В общем случае
, так как движение точки O является прямолинейным. В общем случае  .
.
4) Определение  и
и  . Так как за полюс взята точка O, то ускорение точки B определяется по фомуле:
. Так как за полюс взята точка O, то ускорение точки B определяется по фомуле:

Учитывая, что в нашем случае BO=R, находим:
 .
.
Показав на чертеже точку B отдельно, изображаем (без соблюдения масштаба) векторы, из которых слагается ускорение  , а именно: вектор
, а именно: вектор  (переносим из точки O), вектор
(переносим из точки O), вектор  (в сторону вращения, так как оно ускоренное) и вектор
(в сторону вращения, так как оно ускоренное) и вектор  (всегда от B к полюсу O).
(всегда от B к полюсу O).
5) Вычисление  . Проведя оси X и Y, находим, что
. Проведя оси X и Y, находим, что
 ,
,
 .
.
Аналогичным путем легко найти и ускорение точки P:  и направлено вдоль PO. Таким образом, ускорение точки P, скорость которой в данный момент времени равна нулю, нулю не равно.
и направлено вдоль PO. Таким образом, ускорение точки P, скорость которой в данный момент времени равна нулю, нулю не равно.
Задача 2.11.
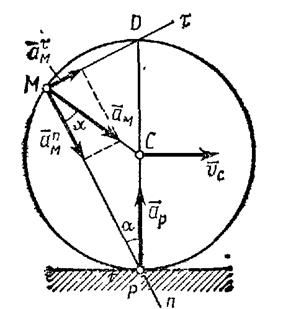
Колесо катится по прямолинейному рельсу так, что скорость  его центра С постоянна. Определить ускорение точки М обода колеса (рис. 2.17).
его центра С постоянна. Определить ускорение точки М обода колеса (рис. 2.17).
Решение.
 |
| Рис. 2.17. К задаче 2.11. |
Так как по условиям задачи  , то
, то  и точка С является мгновенным центром ускорений. Мгновенный центр скоростей находится в точке Р. Следовательно, для колеса
и точка С является мгновенным центром ускорений. Мгновенный центр скоростей находится в точке Р. Следовательно, для колеса

В результате ускорение точки М
 .
.
Таким образом, ускорение любой точки М обода (в том числе и точки Р) равно  и направлено к центру С колеса, так как угол
и направлено к центру С колеса, так как угол  . Заметим, что это ускорение для точки М не будет нормальным ускорением. В самом деле, скорость точки М направлена перпендикулярно РМ . Следовательно, касательная
. Заметим, что это ускорение для точки М не будет нормальным ускорением. В самом деле, скорость точки М направлена перпендикулярно РМ . Следовательно, касательная  к траектории точки М направлена вдоль линии MD, а главная нормаль
к траектории точки М направлена вдоль линии MD, а главная нормаль  — вдоль МР. Поэтому
— вдоль МР. Поэтому
 .
.
Зажача 2.12.
Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна С, соединенных друг с другом и с неподвижными опорами О1 и О2 шарнирами (рис.2.17 а). Точка D находится в середине стержня АВ. Длины стержней равны соответственно L1=0,4 м, L2 =1,2 м, L3=1,4 м, L4=0,6 м.
Дано:  = 6 с -1 , величина постоянная. Заданную угловую скорость считать направленной против часовой стрелки.
= 6 с -1 , величина постоянная. Заданную угловую скорость считать направленной против часовой стрелки.
Найти: скорости точек В и C; угловую скорость  ; ускорение точки В; угловое ускорение
; ускорение точки В; угловое ускорение 
| а) | 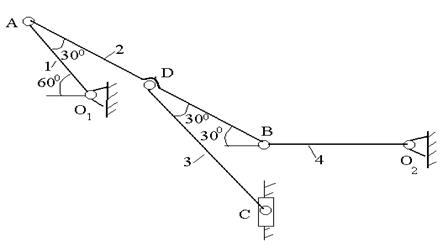 |
| б) | 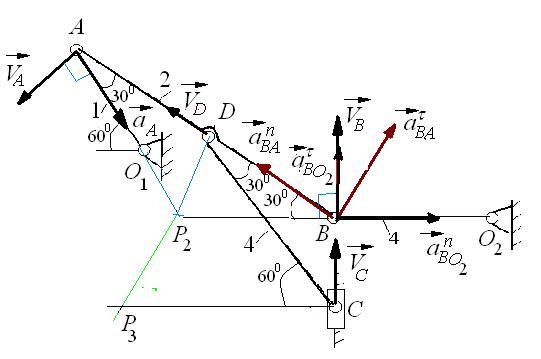 |
| Рис.2.17. К задаче 2.12. |
Решение (рис.2.12б)
1. Определим скорость точки А. Стержень OAвращается вокруг точко O1, поэтому скорость точки А определяется по формуле  = 1,6 м/с и направлена перпендикулярно отрезку O1А.
= 1,6 м/с и направлена перпендикулярно отрезку O1А.  = 1,6 м/с
= 1,6 м/с
2. Определим угловую скорость стержня АВ. Точка В вращается вокруг центра О2, поэтому ее скорость перпендикулярна отрезку O2B. Для нахождения мгновенного центра скоростей отрезка АВ в точках А и В восстановим перпендикуляры к векторам  и
и  . Точка пересечения этих перпендикуляров Р2 является мгновенным центром скоростей второго стержня. Угловая скорость вычисляется по формуле
. Точка пересечения этих перпендикуляров Р2 является мгновенным центром скоростей второго стержня. Угловая скорость вычисляется по формуле  . Расстояние
. Расстояние  определяется из равнобедренного треугольника
определяется из равнобедренного треугольника  , то есть
, то есть  м. Поэтому
м. Поэтому  2,3 с -1 .
2,3 с -1 .
3. Определим скорость точки В по формуле  = 1,6 м/с
= 1,6 м/с
по формуле  = 0,8 м/с
= 0,8 м/с
4. Определим скорость точки С. Так как точка С движется прямолинейно, то ее скорость направлена вдоль движения ползуна. Для нахождения мгновенного центра скоростей отрезка CD в точках C и D восстановим перпендикуляры к векторам  и
и  . Точка пересечения этих перпендикуляров Р3 является мгновенным центром скоростей третьего стержня. Угловая скорость вычисляется по формуле
. Точка пересечения этих перпендикуляров Р3 является мгновенным центром скоростей третьего стержня. Угловая скорость вычисляется по формуле  , а скорость точки С
, а скорость точки С  . Так как треугольник
. Так как треугольник  равносторонний, то
равносторонний, то  = 0,8 м/с
= 0,8 м/с
5. Определим угловую скорость отрезка О2В. Известно, что центром скоростей этого стержня является точка О2В , а также скорость точки B. Поэтому угловая скорость четвертого стержня вычисляется по формуле  и
и  2,7 с -1 .
2,7 с -1 .
6. Определим ускорение точки А. Так как первый стержень вращается равномерно, то точка А имеет относительно О1 только нормальное ускорение, которое вычисляется по формуле  = 6,4 м/с 2 .
= 6,4 м/с 2 .
7. Определим ускорение точки В, которая принадлежит двум стержням — АВ и О2В. Поэтому ускорение точки В определяется с помощью двух формул
 и
и  , где
, где
 — ускорение точки А;
— ускорение точки А;
 — нормальное ускорение точки В относительно А;
— нормальное ускорение точки В относительно А;
 — тангенциальное ускорение точки В относительно А;
— тангенциальное ускорение точки В относительно А;
 — нормальное ускорение точки В относительно О2;
— нормальное ускорение точки В относительно О2;
 — тангенциальное ускорение точки В относительно О2.
— тангенциальное ускорение точки В относительно О2.
 = 6,4 м/с 2 ;
= 6,4 м/с 2 ;  = 4,3 м/с 2 .
= 4,3 м/с 2 .
Можно составить уравнение
 , которое в проекциях на оси координат имеет вид
, которое в проекциях на оси координат имеет вид

Решив полученную систему двух уравнений с двумя неизвестными, получим:
 = 13,2 м/с 2 , аВХ = 4,1 м/с 2 , аВY =9,1 м/с 2 , аВ =10 м/с 2 .
= 13,2 м/с 2 , аВХ = 4,1 м/с 2 , аВY =9,1 м/с 2 , аВ =10 м/с 2 .
8. Определим угловое ускорение стержня АВ, используя формулу  = 13,2 с -2 .
= 13,2 с -2 .
Задача 2.13.
Круглая пластина радиуса R=60 см вращается вокруг неподвижной оси по закону  (рис.2.18 а). Положительное направление угла
(рис.2.18 а). Положительное направление угла  показано на рисунке дуговой стрелкой. Ось вращения ОО1 лежит в плоскости пластины (пластина вращается в пространстве). По окружности радиуса R движется точка М. Закон ее движения по дуге окружности s=
показано на рисунке дуговой стрелкой. Ось вращения ОО1 лежит в плоскости пластины (пластина вращается в пространстве). По окружности радиуса R движется точка М. Закон ее движения по дуге окружности s=  АМ=
АМ=  . На рисунке точка М показана в положении, когда s положительно, при s отрицательном точка М находится по другую сторону от точки А; L=R.
. На рисунке точка М показана в положении, когда s положительно, при s отрицательном точка М находится по другую сторону от точки А; L=R.
Найти абсолютную скорость и абсолютное ускорение точки М в момент времени t=1 с.
| а) | 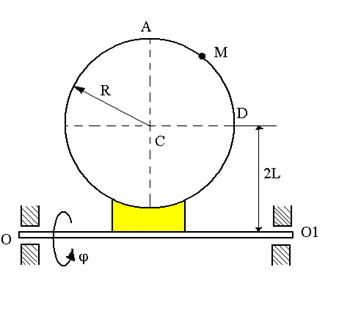 |
| б) | 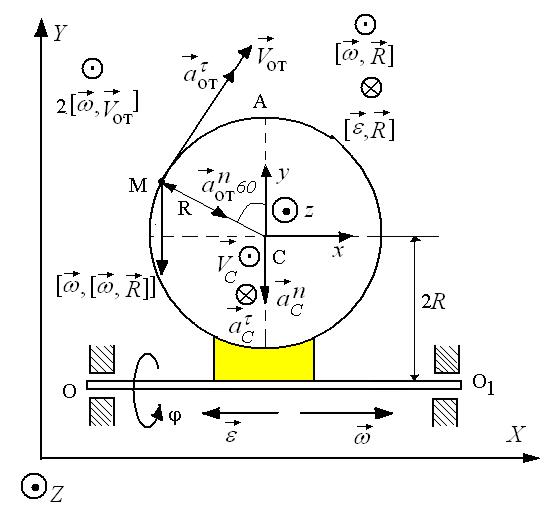 |
| Рис.2.18. К задаче 2.13. |
Решение (рис.2.13 б)
В качестве подвижной системы координат xyz примем точку С. Эта система совершает вращательное движение с угловой скоростью  = 5 с -1 . Угловое ускорение
= 5 с -1 . Угловое ускорение  = -10 с -2 . Направления векторов
= -10 с -2 . Направления векторов  и
и  опледеляются по правилу буравчика и изображены на рис. Причем, вектор направлен в противоположную сторону, так как его значение его проекции на ось OХ неподвижной системы координат XYZ отрицательно. Вычислим скорость и ускорение центра подвижной системы координат С, которая движется по окружности. Скорость вычисляется по формуле
опледеляются по правилу буравчика и изображены на рис. Причем, вектор направлен в противоположную сторону, так как его значение его проекции на ось OХ неподвижной системы координат XYZ отрицательно. Вычислим скорость и ускорение центра подвижной системы координат С, которая движется по окружности. Скорость вычисляется по формуле  , равна 600 см/с и первендикулярна плоскости рисунка. Ускорение точки С состоит из двух компонент — нормальное
, равна 600 см/с и первендикулярна плоскости рисунка. Ускорение точки С состоит из двух компонент — нормальное  = 3000 см/с 2 и тангенциальное
= 3000 см/с 2 и тангенциальное  = 1200 см/с 2 ускорения.
= 1200 см/с 2 ускорения.
Вычислим путь, относительную скорость и ускорение точки M. Ее положение определяется величиной дуги S, в данный момент времени S =  , поэтому она располагается слева от точки А. Относительная скорость
, поэтому она располагается слева от точки А. Относительная скорость  . В данный момент времени она равна 63 см/с и направлена по касательной к окружности. Относительное ускорение является суммой двух составляющих — тангенциальное
. В данный момент времени она равна 63 см/с и направлена по касательной к окружности. Относительное ускорение является суммой двух составляющих — тангенциальное  = 377 см/с -2 и нормальное
= 377 см/с -2 и нормальное  = 66 см/с -2 .
= 66 см/с -2 .
Абсолютная скорость точки M определяется по формуле

Где —  переносная скорость вращательного движения, модуль которой
переносная скорость вращательного движения, модуль которой  = 150 см / с, ее направление определяется по правилу Жуковского. В разложении на оси координат
= 150 см / с, ее направление определяется по правилу Жуковского. В разложении на оси координат
По теореме Пифагора  = 750 м /с.
= 750 м /с.
Абсолютное ускорение точки M определяется по формуле

Где  и
и  — соответственно нормальное и тангенциальное переносные ускорения вращательного движения,
— соответственно нормальное и тангенциальное переносные ускорения вращательного движения,  — кориолисово ускорение.
— кориолисово ускорение.
 = 750 м / с -2 ;
= 750 м / с -2 ;  =300 м / с -2 ;
=300 м / с -2 ;  = 546 м / с -2
= 546 м / с -2
 ;
;
 ;
;
Движение точки м задано уравнением r 4i sin t j 3tk ускорение точки направлено
Яблонский задание К.1. Определение скорости и ускорения точки по заданным уравнениям ее движения.
По заданным уравнениям движения точки M установить вид ее траектории и для момента времени t=t1 (с) найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории. Необходимые для решения данные приведены в таблице 20.
Дополнение к заданию К.1. Данное задание может быть использовано для определения скорости и ускорения точки при ее движении по пространственной траектории. Для этого к двум уравнениям движения (см. табл. 20) добавляется третье уравнение (табл. 22).
Общий порядок выполнения задания в этом случае такой же, как и в приведенном примере.
Заданы уравнения движения точки x=3t, y=t2. Определите скорость точки в момент времени t = 2c.

X=3t, Y=t в квадрате, берем производные, получим
Vx=3, Vy=2t
Скорость равна V= квадратный корень из (Vx в квадрате+Vy в квадрате) = квадратный корень из (9+16)= 5.
Как это сложно. Здесь без академика не обойтись
x= 3*2c.
y= 2*2c.
x= 6
y= 4
как сложно 1 класс