«Понятие цифровых фильтров»
Передаточная функция звена фильтра низкой частоты первого порядка, схема которого представлена на рис.8.1
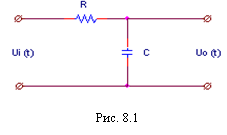 |
равна 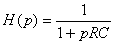 (8.1).
(8.1).
Этой передаточной функции соответствует дифференциальное уравнение, описывающее процессы в данном звене, которое имеет вид
 (8.2).
(8.2).
Преобразуем данную непрерывную систему в дискретную установкой на входе и на выходе синхронных идеальных импульсных элементов, работающих с частотой f (рис.8.2).
 |
Дифференциальное уравнение непрерывной системы преобразуется в разностное уравнение дискретной системы заменой производной конечной разностью.
 (8.3),
(8.3),
где  . Обозначив
. Обозначив
 (8.4)
(8.4)
преобразуем уравнение (8.3) к виду
 (8.5).
(8.5).
 (8.6),
(8.6),
придем к окончательному виду
 (8.7).
(8.7).
Уравнение (8.7) представляет из себя разностное уравнение простейшего дискретного фильтра низких частот первого порядка.
В общем случае линейным дискретным фильтром называется дискретная система, удовлетворяющая линейному разностному уравнению
 (8.8),
(8.8),
где x ( n ) и y ( n ) – соответственно входная и выходная последовательности устройства. Если хотя бы один коэффициент зависит от переменной n , то такой фильтр такой фильтр называется параметрическим или фильтром с переменными параметрами. Если все коэффициенты являются константами, то такой фильтр называется фильтром с постоянными коэффициентами.
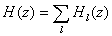
Передаточная функция линейного дискретного фильтра имеет вид
 (8.9),
(8.9),
который получается в результате применения z -преобразования к левой и правой частям уравнения (8.8).
Значения выходной последовательности y ( n ) определяются N значениями входного дискретного сигнала x ( n ) в моменты nT , ( n -1) T , ( n -2) T , и т.д. и M -1 значениями самого выходного дискретного сигнала в прошлые моменты ( n -1) T , ( n -2) T и т.д.
Фильтры, описываемые уравнением (8.8) называются рекурсивными.
В частном случае, при  из (8.8) получаем
из (8.8) получаем
 (8.10).
(8.10).
В этом случае значение выходного дискретного сигнала y ( n ) в любой момент nT определяется лишь значениями входного дискретного сигнала в этот же момент и N -1 его прошлыми значениями. Фильтры, описываемые уравнением (8.10) называются нерекурсивными. Передаточная функция нерекурсивного фильтра имет вид
 (8.11)
(8.11)
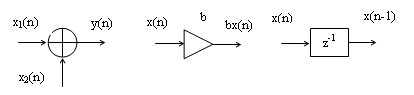
Как видно из уравнения (8.8), в общем случае линейный дискретный фильтр может быть реализован путем комбинации операций умножения сигнала на константу, алгебраического сложения и задержки сигнала на один интервал дискретизации T . Для условного изображения алгоритмов дискретных фильтров используются структурные схемы, на которых вышеперечисленные операции изображаются так, как показано на рис.8.3.
 |
Для реализации дискретных фильтров наиболее часто используются следующие формы структурных схем.
Прямая форма структурной схемы рекурсивного фильтра, представленная на рис.8.4, реализуется непосредственно по разностному уравнению (8.8) или по передаточной функции (8.9).
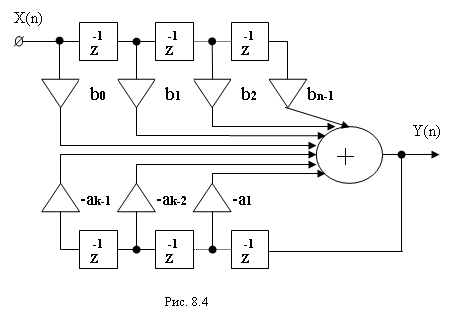 |
Эта схема содержим один сумматор, умножители и N + M -2 элементов задержки.
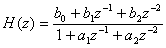
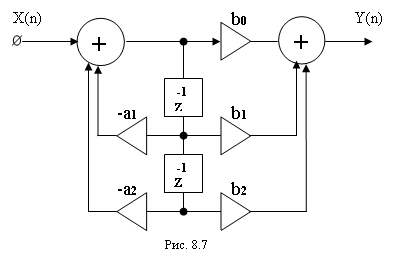
В качестве примера рассмотрим реализацию в прямой форме т.н. «биквадратного блока» – фильтра второго порядка, описываемого уравнением
 (8.12)
(8.12)
или соответствующей передаточной функцией
 (8.13).
(8.13).
Прямая форма структурной схемы биквадратного блока представлена на рис.8.5.
 |
Прямая каноническая форма содержит минимальное число элементов задержки. Она получается если передаточную функцию рекурсивного фильтра (8.9) представить в виде
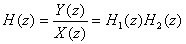 (8.14),
(8.14),
где 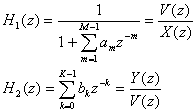 (8.15).
(8.15).
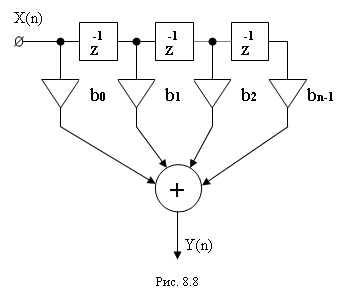
Передаточным функциям H 1 ( z ) и H 2 ( z ) соответствуют разностные уравнения
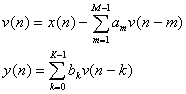 (8.16).
(8.16).
Так как в фильтрах, реализующих H 1 ( z ) и H 2 ( z ), имеет место только задержка сигнала v ( n ), то можно использовать только один набор элементов задержки. Прямая каноническая форма структурной схемы фильтра, описываемого уравнением (8.8) или соответствующей передаточной функцией (8.9) представлена на рис.8.6.
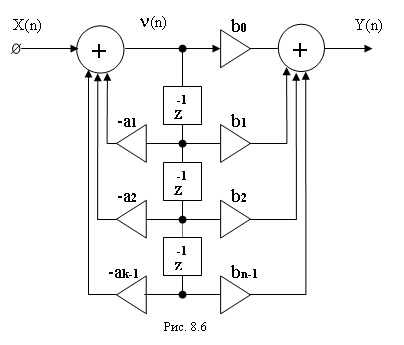 |
Она содержит минимальное число элементов задержки  и два сумматора. В качестве примера на рис.8.7 представлена прямая каноническая форма структурной схемы биквадратного блока с передаточной функцией (8.13).
и два сумматора. В качестве примера на рис.8.7 представлена прямая каноническая форма структурной схемы биквадратного блока с передаточной функцией (8.13).
Каскадная (последовательная) форма структурной схемы дискретного фильтра соответствует представлению передаточной фугкции (8.9) в виде произведения
 (8.17),
(8.17),
где Hl ( z ) – передаточная функция биквадратного блока
 (8.18),
(8.18),
где  .
.
При этом отдельные биквадратные блоки, реализующие Hl ( z ) соединяются между собой последовательно. Такое представление всегда можно получить разложением числителя и знаменателя (8.9) на сомножители первого и второго порядка. Так что возможно, что в некоторых сомножителях Hl ( z ) некоторые коэффициенты равны нулю. При этом данные сомножители реализуются более простой структурой, чем показано на рис.8.5 и рис.8.7. Кроме того, при последовательном соединении биквадратных блоков, реализованных в прямой форме (рис.8.5), может оказаться, что элементы задержки в цепи обратной связи предшествующего блока дублируют элементы задержки в прямой ветви последующего блока. Поэтому при каскадной реализации L -звенного фильтра на биквадратных блоках в прямой форме из схемы могут быть исключены 2( L -1) элементов задержки.
Параллельная форма структурной схемы рекурсивного дискретного фильтра соответствует представлению передаточной функции (8.9) в виде
 (8.19),
(8.19),
где слагаемые Hl ( z ) получаются при разложении H ( z ) на простые дроби типа
 (8.20)
(8.20)
и могут быть реализованы в виде упрощенных структур биквадратных блоков.
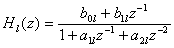
Прямая форма структурной схемы нерекурсивного фильтра является непосредственной реализацией передаточной функции нерекурсивного фильтра (8.11) или его разностного уравнения (8.10). Прячмая форма, представленная на рис.8.8 содержит N -1 элементов задержки, N умножителей и сумматор на N входов.
 |
Эту форму называют также трансверсальным фильтром или фильтром с многоотводной линией задержки.
Каскадная (последовательная) форма структурной схемы нерекурсивного фильтра соответствует представлению передаточной функции (8.11) в виде произведения
(8.21),
где 
или 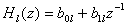
Такое разложение всегда можно получить разложением H ( z ) на сомножители первого и второго порядка, каждый из которых реализуется с помощью упрощенной структуры биквадратного блока, а все составляющие блоки соединяются между собой последовательно.
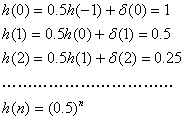
Важнейшей временной характеристикой линейной дискретной системы является импульсная характеристика, под которой понимают реакцию системы h ( n ) на единичный импульс d ( n ) при нулевых начальных условиях. Импульсную характеристику можно расчитать путем решения соответствующего разностного уравнения дискретной системы.
В качестве примера вычислим импульсную характеристику дискретного линейного фильтра, описываемого разностным уравнением  . Пусть y (-1)=0, x ( n )= d ( n ). При этом y ( n ) есть h ( n ). Тогда получим
. Пусть y (-1)=0, x ( n )= d ( n ). При этом y ( n ) есть h ( n ). Тогда получим
Входной дискретный сигнал фильтра x ( n ) можно представить в виде
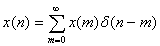 (8.22).
(8.22).
Так как реакция дискретного фильтра на единичный импульс есть импульсная характеристика h ( n ), то вследствие стационарности фильтра реакцией фильтра на d ( n — m ) будет h ( n — m ). Тогда, вследтсвие линейности фильтра реакцией на вхожную последовательность x ( n ) будет
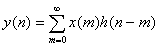 (8.23).
(8.23).
Заменой переменных это выражение может быть приведено к виду
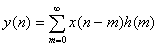 (8.24).
(8.24).
При этом предполагается, что h ( n )=0 при n x ( n )=0 при n
 (8.25).
(8.25).
Последняя формула определяет реакцию линейного дискретного фильтра на произвольное входное воздействие как свертку этого входного воздействия и импульсной характеристики.
Согласно формуле (8.25) переходная характеристика линейного дискретного фильтра т.е. его реакция на единичную последовательность при нулевых начальных условиях, может быть вычислена как
 (8.26).
(8.26).
В свою очередь, очевидно, что
 (8.27).
(8.27).
Если на вход линейного дискретного фильтра подается сигнал x ( n )= d ( n ), то реакцией системы будет y ( n )= h ( n ). При этом z -преобразования обоих сигналов будут иметь вид X ( z )=1, Y ( z )= H ( z ). Тогда передаточная функция фильтра
 (8.28).
(8.28).
Это означает, что передаточная функция линейного дискретного фильтра есть ни что иное как z -преобразование импульсной характеристики. Если записать передаточную функцию в виде
 (8.29),
(8.29),
то видно, что коэффициенты bk совпадают с k -ми выборками импульсной характеристики и следовательно
 (8.30).
(8.30).
Таким образом, импульсную характеристику можно вычислить как обратное z -преобразование передаточной функции.
Фильтром с конечной импульсной характеристикой (КИХ-фильтром) называется фильтр, у которого импульсная характеристика представляет собой конечный дискретный сигнал, т.е. может принимать отличные от нуля значения лишь при n =0, 1, …, N -1.
Фильтром с бесконечной импульсной характеристикой (БИХ-фильром) называется фильтр, у которого импульсная характеристика может принимать отличные от нуля значения на бесконечном множестве значений n =0, 1, …
Нерекурсивный фильтр всегда является КИХ-фильтром, в то время как рекурсивный фильтр может быть как КИХ так и БИХ фильтром.
Линейный дискретный фильтр физически реализуем, если его выходной сигнал не опережает входного, т.е. в любой момент n выходной сигнал y ( n ) зависит лишь от значений входного сигнала в моменты, предшествующие n и не зависит от его значений в последующие моменты. Критерием физической реализуемости линейного дискретного фильтра является равенство нулю отсчетов импульсной характеристики при отрицательных значениях моментов отсчетов, т.е. h ( n )=0 при n
Фильтр называется устойчивым, если при любых начальных условиях реакция фильтра на любое ограниченное воздействие x ( n ) также ограничена, т.е. если  для всех n , то
для всех n , то  тоже для всех n , причем A и B – постоянные, не зависящие от n . Из выражения (8.24) следует, что если x ( n ) – ограничено, т.е. для всех n , то абсолютное значение выходного сигнала
тоже для всех n , причем A и B – постоянные, не зависящие от n . Из выражения (8.24) следует, что если x ( n ) – ограничено, т.е. для всех n , то абсолютное значение выходного сигнала
 (8.31).
(8.31).
Значит, критерием устойчивости дискретного фильтра является абсолютная сходимость ряда отсчетов импульсной характеристики.
 (8.32).
(8.32).
Можно показать, что условие (8.32) является не только достаточным но и необходимым условием устойчивости фильтра. Однако неопсредственное использование этого условия для проверки устойчивости практически затруднено. Поэтому рассмотрим другую формулировку критерия устойчивости. Если представить передаточную функцию фильтра в общем виде (8.30), то можно сделать вывод о том, что
 (8.33).
(8.33).
Если  , то
, то
 (8.34).
(8.34).
Это значит, что в устойчивом фильтре H ( z ) конечна во всех точках z -плоскости, где  , и, следовательно, передаточная функция H ( z ) не должна иметь особых точек полюсов при
, и, следовательно, передаточная функция H ( z ) не должна иметь особых точек полюсов при  , т.е. на и вне единичного круга z -плоскости. Таким образом, фильтр будет устойчивым только тогда, когда все полюсы H ( z ) расположены внутри единичного круга z -плоскости.
, т.е. на и вне единичного круга z -плоскости. Таким образом, фильтр будет устойчивым только тогда, когда все полюсы H ( z ) расположены внутри единичного круга z -плоскости.
Найдем преобразования Фурье входного и выходного сигнала линейного дискретного фильтра
 (8.35).
(8.35).
Здесь суммирование производится от n =0 так как предполагается, что x ( n )=0 и y ( n )=0 при n
Частотной характеристикой дискретного фильтра называется отношение
 (8.36).
(8.36).
частотная характеристика совпадает с передаточной функцией на единичной окружности z -плоскости, т.е. при  . Поэтому для рекурсивного фильтра получим
. Поэтому для рекурсивного фильтра получим
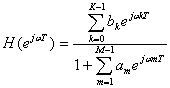 (8.37),
(8.37),
а для нерекурсивного фильтра
 (8.38).
(8.38).
В общем случае H ( e j w T ) – комплексная функция, которая может быть записана в виде
 (8.39),
(8.39),
где A ( w ) – модуль частотной характеристики – амплитудно-частотная характеристика (АЧХ), j ( w ) – аргумент частотной характеристики – фазочастотная характеристика (ФЧХ), R ( w )= A ( w ) cos j ( w ), J ( w )= A ( w ) sin j ( w ) – вещественная и мнимая части частотной характеристики. Производная от ФЧХ
 (8.40)
(8.40)
называется групповым временем замедления (ГВЗ).
Из теории дискретных систем вытекают ряд важных свойств частотных характеристик линейных дискретных фильтров.
1. Все частотные характеристики дискретных фильтров являются непрерывными периодическими функциями частоты с периодом w d =2 p / T .
2. Для вещественных фильтров, т.е. фильтров, передаточные функции которых имеют только вещественные коэффициенты, АЧХ A ( w ) и ГВЗ t ( w ) представляют собой четные функции частоты, а ФЧХ j ( w ) – нечетную функцию частоты.
Из этого следует, что требования к частотным характеристикам достаточно задавать лишь на интервале полупериода  .
.
Под цифровым фильтром понимают дискретный фильтр, описываемый уравнением (8.8) и реализованный программным путем с помощью микропроцессора или аппаратным путем в виде специализированного цифрового вычислительного устройства, состоящего из элементов памяти (регистров), сумматоров, умножителей и устройств управления.
Сигналы на входе и на выходе цифрового фильтра являются цифровыми, т.е. последовательностями чисел. Каждое из этих чисел представляется в виде двоичного кода определенной конечной разрядности. В цифровом фильтре в соответствии с алгоритмом (8.8) выполняются операции пересылки, сложения и умножения кодов. При этом алгоритм функционирования (8.8) реализуется неточно. Ошибки цифровой фильтрации обусловлены, во-первых, квантованием входных и выходных сигналов, во-вторых, квантованиемкоэффициентов фильтра и, в-третьих, конечной разрядностью операционных устройств, вследствие чего имеет место округление результатов арифметических операций. Таким образом, выбранная структура цифрового фильтра, разрядность входных и выходных сигналов, разрядность арифметических устройств влияют на точность работы устройства идолжны выбираться таким образом, чтобы результирующая ошибка цифрового фильтра не превышала допустимой величины.
Другим важным критерием качества цифрового фильтра является его быстродействие, определяемое минимальным временем, необходимым для вычисления одного отсчета выходного сигнала. Очевидно, что это время должно быть не больше периода дискретизации сигналов.
Цифровые фильтры могут иметь свойства как КИХ так и БИХ фильтров. В обоих случаях фильтры имеют свои преимущества и недостатки.
Преимущества КИХ фильтров:
1. КИХ фильтры могут иметь линейную ФЧХ.
2. КИХ фильтры, реализованные по нерекурсивному алгоритму всегда устойчивы.
3. Для КИХ фильтров, реализованных по нерекурсивному алгоритму шумы квантования можно сделать приемлемо малыми.
4. КИХ фильтры могут быть реализованы по рекурсивному алгоритму, если это необходимо.
Недостатки КИХ фильтров:
1. Длительность импульсной характеристики КИХ фильтра, несмотря на то, что она конечна, может оказаться достаточно большой для достижения резкого спада частотной характеристики на границе зоны пропускания.
2. Разработка КИХ фильтров более сложна чем разработка БИХ фильтров с аналогичными характеристиками.
Преимущества БИХ фильтров:
1. БИХ фильтры могут быть использованы для реализации цифровых аналогов классических видов аналоговых фильров, таких как фильтры Баттерворта, Чебышева и т.д.
2. При аналогичных характеристиках, БИХ фильтры имеют более простую реализацию по сравнению с КИХ фильтрами.
Недостатки БИХ фильтров:
1. БИХ фильтры более чувствительны к конечной разрядности вычислений, которая приводит у них к появлению колебаний т.н. «предельных циклов».
2. За исключением специального случая, когда все полюса передаточной функции лежат на единичной окружности z -плоскости, невозможно построить реализуемый стабильный БИХ фильтр, имеющий точно линейную ФЧХ.
Преобразование Лапласа дискретного сигнала. Z-преобразование. Разностное уравнение дискретного фильтра
DSPL-2.0 — свободная библиотека алгоритмов цифровой обработки сигналов
Распространяется под лицензией LGPL v3
В предыдущих разделах мы подробно рассмотрели расчет аналоговых фильтров с заданными характеристиками. Пришло время переходить к анализу цифровых фильтров. Необходимо разделить понятия дискретного и цифрового фильтра.
Дискретным мы будем называть фильтр, импульсная характеристика которого является дискретной, а коэффициенты передаточной функции рассчитаны точно без ошибок округления.
Под цифровым фильтром мы будем понимать дискретный фильтр, коэффициенты передаточной характеристики которого рассчитаны не точно, а с ошибками округления вызванными конечной разрядностью представления числа.
На практике все рассчитанные фильтры являются цифровыми, так как разрядность представления числа ограничена. Однако использование компьютера позволяет производить операции с 64-битными числами с плавающей точкой, что минимизирует ошибки округления, поэтому можно предполагать, что рассчитанные с такой разрядностью фильтры «почти дискретные».
Важно отметить, что округление коэффициентов устойчивого дискретного фильтра, даже самое незначительное, может привести к неустойчивому цифровому фильтру. Поэтому при расчете фильтров, особенно фильтров высокого порядка, всегда необходимо проверять их устойчивость.
В цифровых системах сигналы представляют собой последовательности отсчетов, взятые, как правило, через равные промежутки времени . Ранее мы уже рассматривали модель дискретного сигнала :
Графически процесс дискретизации сигнала показан на рисунке 1.

Рассмотрим преобразование Лапласа дискретного сигнала :
Важное замечание. Если , то получаем дискретно-временное преобразование Фурье дискретного сигнала, при этом является периодической функцией частоты с периодом , кроме того, если , то
Кружочками условно показаны нули образа , а крестиками — полюсы.

Важно отметить, что периодичность дискретного преобразования Лапласа соответствует периодичности преобразования Фурье дискретного сигнала . Однако, как мы знаем из теории дискретного преобразования Фурье, на каждом периоде повторения спектр дискретного сигнала может быть искажен эффектом алиасинга, т.е. наложением «хвостов» исходной спектральной плотности из высших зон Найквиста (заполненная точками область на карте нулей и полюсов образа соответствует высшим зонам Найквиста).
В случае дискретного преобразования Лапласа эффект алиасинга сохраняется, и периодический образ на каждом периоде отличается от исходного образа . Так например, мы можем наблюдать алиасинг полюсов из высших зон Найквиста при неверном выборе частоты дискретизации. Если все полюсы исходного образа попадают в первую зону Найквиста, то при дискретизации они периодически разможатся, как это показано на рисунке 2.
Положение нулей дискретного преобразования Лапласа , как правило отличается от положения нулей исходного образа в результате эффекта алиасинга.
Рассмотрим процесс фильтрации дискретного сигнала . Согласно свойству преобразования Лапласа, процесс фильтрации во временно́й области сводится к умножению образа исходного сигнала на передаточную характеристику фильтра , которая в свою очередь, представляет преобразование Лапласа импульсной характеристики фильтра . Тогда преобразование Лапласа сигнала на выходе фильтра можно записать:
Первый случай. — образ дискретного сигнала, удовлетворяет (3), а — передаточная характеристика непрерывного фильтра, и свойство (3) не выполняется, значит также не удовлетворяето (3). Тогда можно сделать вывод о том, что при прохождении дискретного сигнала через аналоговый фильтр, выходной сигнал получается аналоговым. Аналоговый фильтр производит восстановление непрерывного сигнала по имеющемуся дискретному.
Второй случай. удовлетворяет (3), также удовлетворяет (3) (импульсная характеристика фильтра является дискретной), причем интервалы дискретизации сигнала и фильтра одинаковые и равны . Тогда в результате произведения также удовлетворяет (3). Таким образом, при прохождении дискретного сигнала через дискретный фильтр, выходной сигнал получается дискретным, с той же частотой дискретизации.
Третий случай. и удовлетворяют (3), но интервал дискретизации сигнала равен , а интервал дискретизации импульсной характеристики фильтра (исходный сигнал и и импульсная характеристика фильтра дискретизированы с разной частотой). В этом случае , в частных случаях, может удовлетворять (3), но период дискретизации выходного сигнала , будет равен «наименьшему общему кратному» периодов и . Заметим, что термин «наименьшее общее кратное» взят в кавычки, потому что и могут быть вещественными числами, в том числе и иррациональными. Тогда понимается как вещественное число, которое делится нацело как на , так и на . Например, если , а , то . Данный на практике не встречается, так как требует реализации цифровых схем, работающих на разных тактовых частотах. Разработка таких схем сопряжена с трудностями синхронизации при переходе данных из модулей, работающих на различных тактовых частотах.
Основное правило — для дискретных и цифровых фильтров интервалы дискретизации сигнала и фильтра должны быть равны.
Таким образом, для того чтобы на выходе фильтра получить дискретный сигнал, необходимо чтобы импульсная характеристика фильтра также была дискретной, а значит передаточная характеристика дискретного фильтра может быть представлена как результат дискретного преобразования Лапласа:
Если у дискретного фильтра количество коэффициентов ограничено, то такой фильтр называют фильтром с конечной импульсной характеристикой (КИХ-фильтром) [1] , а если количество коэффициентов бесконечно, то такой фильтр называют фильтром с бесконечной импульсной характеристикой (БИХ-фильтр) [2] .
При переходе от аналогового фильтра к цифровому, происходит периодическое размножение передаточной характеристики вдоль оси . При этом, переменная в образах дискретного преобразования Лапласа всегда присутствует только в показателе экспоненты, для обеспечения периодичности передаточных характеристик дискретных систем [1, стр 155].
В результате периодизации также происходит периодическое размножение нулей и полюсов, что доставляет некоторые неудобства. Для облегчения анализа вводят переменную вида:
Отображение не является конформным [2, стр. 145], потому что множество точек плоскости отображается в одну точку плоскости .
Графически отображение -плоскости в комплексную -плоскость показано на рисунке 3.

Рассмотрим некоторые особенности отображения (7).
Если , где , то для всех этих точек .
Если чисто вещественно, то и также вещественное, причем 0″/>. Заметим, что при , (внутри единичной окружности), а при величина (вне единичной окружности).
При , точка на мнимой оси плоскости отображается в точку , расположенную на единичной окружности и повернутой на угол рад. Таким образом, вся мнимая ось плоскости отображается в единичную окружность плоскости . Причем, один оборот единичной окружности соответствует от до рад/c.
Левая полуплоскость комплексной плоскости отображается внутрь единичной окружности плоскости . Действительно если , то представляет вектор длины повернутый на угол рад. При , длина вектора .
Правая полуплоскость комплексной плоскости отображается вне единичной окружности плоскости .
При переходе из комплексной -плоскости в комплексную -плоскость все бесконечно-повторяющиеся нули и полюса дискретного фильтра в -плоскости отображаются в конечное количество нулей и полюсов в -плоскости. Тогда выражение для передаточной характеристики дискретного фильтра может быть представлено при помощи подстановки (7) через конечное количество нулей и полюсов в -плоскости как:
Таким образом, главный вывод, который мы должны сделать заключается в следующем: при переходе от аналогового фильтра к дискретному, образ по Лапласу становится периодическим по мнимой оси, а количество нулей и полюсов фильтра бесконечным. Но при переходе в комплексную –плоскость мы получаем снова конечное количество нулей и полюсов, и соответственно конечное количество коэффициентов дискретного фильтра.
Рассмотрим некоторые свойства -преобразования. При этом мы будем рассматривать свойства относительно индексов отсчетов в предположении . В результате мы можем опустить период дискретизации в выражениях -преобразования.
Линейность. -образ суммы двух сигналов равен сумме -образов этих сигналов. Действительно, пусть есть два дискретных сигнала и , . Найдем -преобразование их суммы :
Можно показать, что данное свойство также справедливо и для циклической задержки ограниченной выборки сигнала:
Теорема о свертке. Пусть дано два сигнала ограниченной длительности и , . Найдем -преобразование их циклической свертки :
При выводе было использовано свойство циклической задержки -преобразования. Таким образом циклическая свертка сигналов соответствует произведению их -образов.
Аналогично, используя свойство задержки, можно показать, что -образ линейной свёртки сигналов равен произведению их -образов:
Ранее мы говорили о том, что пассивные аналоговые цепи описываются интегро-дифференциальными уравнениями непрерывного времени . При этом математический аппарат преобразования Лапласа позволяет перейти к алгебраическим уравнениям комплексной переменной при описании характеристик комплексных сопротивлений двухполюсников и передаточных функций четырехполюсников.
Ограничение количества пассивных элементов аналогового фильтра приводит к ограничению порядков интегро-дифференциальных уравнений и, соответственно, полиномов переменной при описании передаточных характеристик.
Прохождение сигнала через аналоговый фильтр описывается интегралом свертки входного сигнала и непрерывной импульсной характеристики , которая в свою очередь не может иметь произвольную форму при ограничении порядка аналогового фильтра, потому что является результатом решения интегро-дифференциальных уравнений ограниченного порядка.
Дискретные системы, в свою очередь, описываются разностными уравнениями дискретного времени . По аналогии с аналоговыми фильтрами, мы не можем требововать бесконечных порядков разностных уравнений, потому что это потребует бесконечных вычислительных ресурсов. Таким образом, мы должны ограничить порядки разностных уравнений, которые связывают выходной сигнал дискретного фильтра с входным сигналом , а также со значениями выходного сигнала на предыдущих тактах .
Заметим, что здесь мы также ведем рассмотрение относительно индексов отсчетов сигналов, в предположении c.
Общее разностное уравнение линейного цифрового фильтра имеет вид:
Временной индекс изменяется от до бесконечности, т.к. предполагается, что фильтр после включения может работать неограниченно долго.
Рассмотрим -преобразование разностного уравнения (16). -образ выходного сигнала равен:
Дискретные фильтры и их синтез
Постановка задачи и этапы синтеза.Дискретная цепь может осуществлять любые операции: фильтрацию сигнала, корректирование характеристик и т. п., т. е. выполнять функции любой аналоговой цепи.
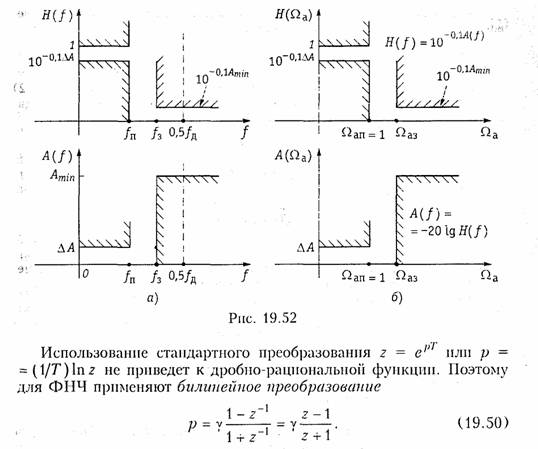
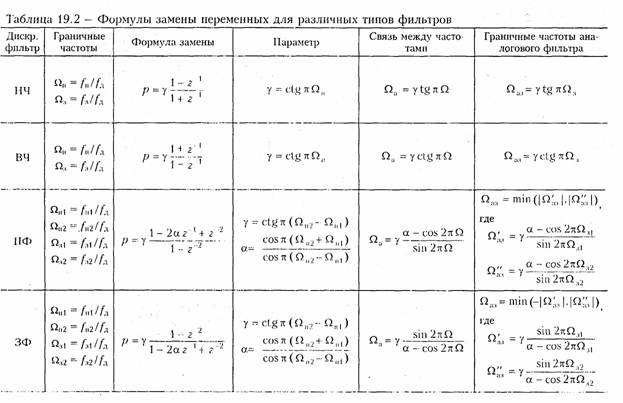
В частности, при синтезе дискретных частотных фильтров нужно найти такие коэффициенты передаточной функции (19.40), или (19.41), частотная характеристика которой удовлетворяла бы нормам ослабления фильтра в полосах пропускания и непропускания (рис. 19.52, а). Определение коэффициентов — это задача аппроксимации. Известен целый ряд методов ее решения. Наиболее распространенным является следующий метод. Сначала рассчитывают аналоговый НЧ- прототип и получают его передаточную функцию Н(р), затем путем замены комплексной переменной р = Ф переходят от Н(р) к передаточной функции дискретной цепи H(z).
(у — некоторый постоянный множитель), которое является первый приближением стандартного преобразования при разложении его в ряд Тейлора:

Из разложения (19.51) следует, что необходимо выбирать γ = 2/Т. Однако, далее мы покажем, что удобнее брать другие значения коэффициента γ .
Билинейное преобразование (19.50) переводит все точки из левой полуплоскости переменной р в точки на единичной окружности плоскости z. Так что, если была устойчива аналоговая цепь, будет устойчивой и дискретная. Подтвердим эти утверждения па примере.
Пример.Найдем положения точек на z-плоскости, соответствующих следующим значениям переменной р: р1 = —2; р2 = —2 + j2, р3 = j2.
Из формулы (19.50) найдем выражение для расчета z:

Модуль z равен 1, т. е. точка р =j2, лежащая на мнимой осп плоскости р, переходит в точку на единичной окружности плоскости z при использовании билинейного преобразования.
Переход к аналоговому прототипу применяется обычно для дискретных фильтров, имеющих бесконечную импульсную характеристику h(k), принимающую ненулевые значения на бесконечном множестве значений k = 0, 1.
Дискретные цепи с конечной импульсной характеристикой, принимающей ненулевые значения лишь при k = 0, 1, . N — 1, не имеют аналогов среди пассивных электрических фильтров, поэтому для их расчета применяются другие методы.
Нерекурсивные фильтры с передаточной функцией (19.42) всегда имеют конечные импульсные характеристики. Рекурсивные фильтры с передаточной функцией (19.40) могут иметь как конечные, так и бесконечные импульсные характеристики.
Требования к аналоговому фильтру-прототипу.Следует иметь в виду, что частотная характеристика аналогового фильтра определена на всей положительной полуоси частот, в то время как у дискретного фильтра она имеет тот же смысл только до частоты 0,5fд, затем она периодически повторяется (рис. 19.44). Ясно, что шкала частот дискретного фильтра оказывается деформированной относительно шкалы частот аналогового фильтра. Соответствие этих шкал легко установить из билинейного преобразования (19.50). Перепишем его в виде:

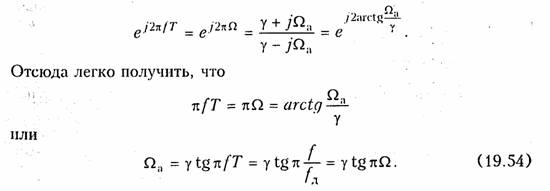
Обозначим, во избежание путаницы, нормированную частоту для аналогового фильтра-прототипа Ω a, обычную (т. е. ненормированную) частоту для дискретного фильтра будем, как и ранее, обозначать буквой f, а нормированную — буквой Ω. Теперь заменим в (19.53) комплексную переменную р на jΩ a, а комплексную переменную z на е j 2π fT = е j 2π f Ω и установим соответствие между частотами f (пли Ω) и Ωa:
При изменении частоты fот 0 до 0,5fд, или нормированной частоты Ω от 0 до 0,5, нормированная частота Ω a в шкале аналогового прототипа будет пробегать значения от 0 до бесконечности (рис. 19.52).
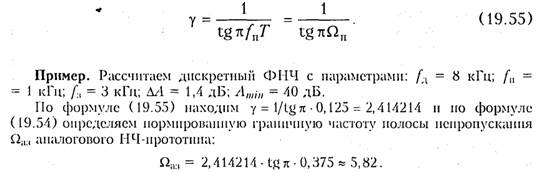
Во многих справочниках по расчет фильтров граничная частота полосы пропускания принимается равной Ω ап = 1. Чтобы частота fи(или Ω и) дискретного фильтра пересчитывалась в Ω ап = 1 (рис. 19.52, б), из (19.54) ясно, что коэффициент у нужно взять равным:
Тем самым, произведен пересчет требований, предъявленных к дискретному фильтру (рис. 19.52, а) в требования к аналоговому НЧ- прототипу (рис. 19.52, 6).
Расчет аналогового НЧ- прототипа.Исходными данными для расчета являются требования к НЧ- пототипу (рис. 19.52, б). По ним, пользуясь любым справочником, рассчитывают передаточную функцию фильтра-прототипа.
Реализация рекурсивного фильтра.Для перехода от аналогового фильтра к дискретному воспользуемся заменой переменных (19.50)
В результате получаем Н(z) в виде дробно-рациональной функции, которая может быть реализована.
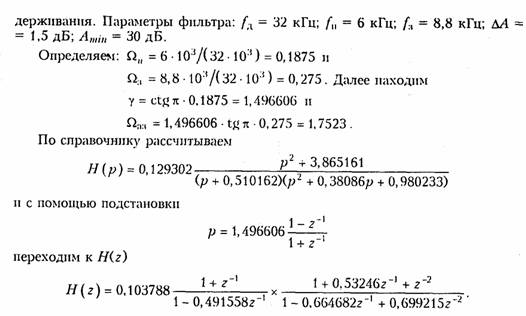
Пример.От передаточной функции (19.56) аналогового фильтра-прототипа перейдем к передаточной функции Н(z) дискретного фильтра.
Подставим в выражение (19.56) значение

Схема фильтра, имеющего такую передаточную функцию, приведена на рис. 19.53. Амплитудно-частотная характеристика A(Ω) = 20lgH(Ω), рассчитанная па основании формул для АЧХ типовых звеньев, показана па рис. 19.54 (кривая 1).
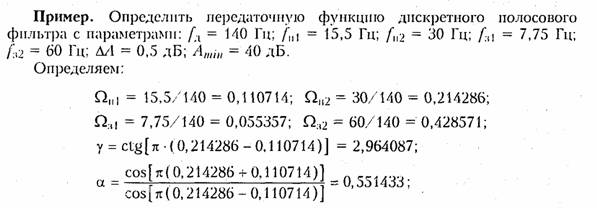
Аналогичным образом производится расчет фильтров со всплесками ослабления (нулями передачи).
Пример.Найдем передаточную функцию дискретного фильтра НЧ с АЧХ, равноволновой в полосе пропускания и со всплеском ослабления в полосе за-

Амплитудно-частотная характеристика А(Ω) = 201gtН(Ω) такого фильтра показана на рис. 19.54 (кривая 2).
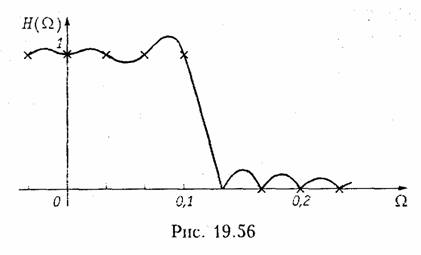
Синтез фильтров с конечной импульсной характеристикой.Если известна передаточная функция H(z) дискретного фильтра, то для реализации фильтра с конечной импульсной характеристикой h(k), равной нулю везде кроме 0 ≤ k≤ N-1, поступают следующим образом. Амплитудно-частотную характеристику H(Ω) фильтра дискретизируют, разбивая частотный интервалΩ = 0 ÷ 1 на N равных интервалов. В результате получают последовательность отсчетов АЧХ на N частотах Ω = n/N , т. е. H(n/N), 0 ≤n ≤ N — 1. Поскольку H(n/N) = N· Н(п), то, подставляя эту последовательность в формулу обратного дискретного преобразования Фурье (19.14), получаем выражение для дискретной импульсной характеристики h(k) фильтра

Как известно, конечную импульсную характеристику имеют нерекурсивные фильтры. Это значит, что полученные отсчеты дискретной импульсной характеристики h(k) являются коэффициентами усиления α0,α2,…, α N-1в схеме нерекурсивного фильтра, приведенной на рис. 19.33.
Пример. Найдем импульсную характеристику h(k) фильтра нижних частот, имеющего граничную частоту полосы пропускания Ω = 0,1, и АЧХ, приведенную на рис. 19.55. Импульсную характеристику будем рассчитывать для значения N = 30.
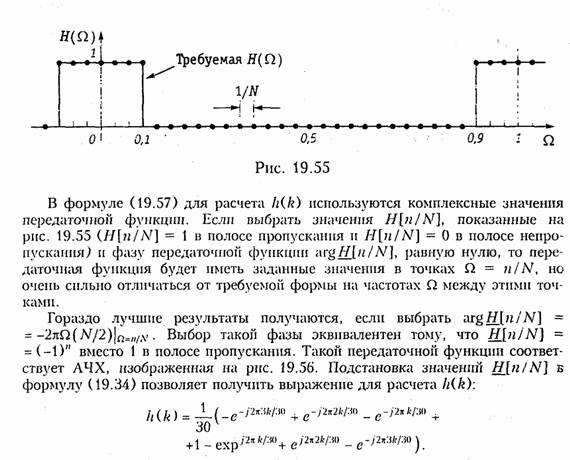
График конечной импульсной характеристики h(k) изображен на рис. 19.57.
Для реализации фильтра с такой импульсной характеристикой по схеме рис. 19.33 потребуется 30 усилителей и 29 элементов задержки, т. е. схема довольно громоздкая. Схема с обратными связями, реализующая АЧХ, изображенную на рис. 19.55, будет иметь гораздо меньше элементов. Однако достоинством нерекурсивных фильтров с конечной импульсной характеристикой является то, что они всегда устойчивы и, кроме того, обеспечивают линейные фазовые характеристики.
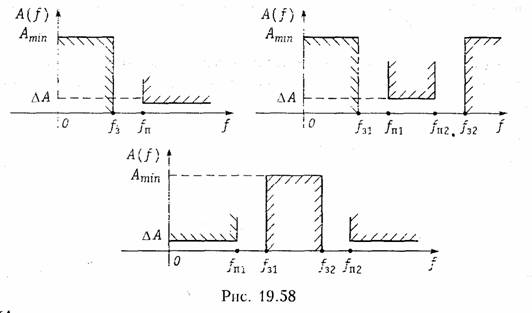
Синтез дискретных фильтров верхних частот, полосовых и режекторных.Требования к любому типу фильтра преобразуются

в требования к аналоговому ФНЧ-прототнпу. Затем рассчитывается аналоговый прототип, как это показано выше, п с помощью замены переменных переходят от Н(р) к Н(z).
Конечно, формулы замены переменных уже не такие, как для ФНЧ. Они приведены для разных типов фильтров в табл. 19.2. Требования к дискретным фильтрам графически изображены на рис. 19.59.

Цифровые фильтры
Функциональная схема цифрового фильтра.В отличие от дискретных фильтров в цифровом фильтре (ЦФ) осуществляется обработка цифровых сигналов (рис. 19.1, в). На рис. 19.60 изображена функциональная схема цифровой обработки аналоговых сигналов. Аналоговый сигнал x(t) подается на аналого-цифровой преобразователь (АЦП), где осуществляется дискретизация, квантование непрерывного сигнала и его кодирование. В результате на выходе АЦП формируется цифровой сигнал, представляющий собой
последовательность двоичных чисел с фиксированным количеством разрядов.

Например, если отсчет имеет величину 30 В, то запись числа в двоичном 8-разрядном коде будет такой: 00011110. Закодированные в двоичном коде отсчеты на выходе кодера АЦП на рисунке обозначены x(k). Далее двоичная последовательность поступает на вычислительное устройство (ВУ), которое представляет собой универсальную или специализированную микро ЭВМ, микропроцессорное или любое другое вычислительное устройство. Главное состоит в том, что в памяти ВУ должна быть записана программа вычисления, например, выражение (19.35), и отсчеты импульсной реакции, заданной цепи. Следовательно, в результате работы программы ВУ будет выдавать закодированные в двоичном коде отсчеты y(k). Далее двоичная выходная последовательность поступает на вход цифро-аналогового преобразователя (ЦАП), содержащий декодер и интерполятор. В ЦАП осуществляется декодирование сигнала, в результате формируется дискретный выходной сигнал y(kT) и после интерполяции на выходе ЦАП получаем выходной аналоговый сигнал y(t).
Как видим, ВУ может сыграть роль реальной цепи. И хотя самой физической цепи в наличии может и не быть, а задана она будет лишь в виде отсчетов импульсной реакции и программы вычислений, мы будет наблюдать на выходе описанной системы такое же выходное напряжение y(t), как и на выходе реальной цеписледует отметить, что при цифровой обработке ЦАП может и отсутствовать, если выходной сигнал надо получить в цифровой форме.
Аналогово-цифровое преобразование сигналов.Как следует из рис. 19.60 АЦП осуществляет дискретизацию аналогового сигнала, его квантование по уровню с шагом Δ (рис. 19.1, в) и кодирование. Обычно процесс квантования осуществляется одновременно с его

кодированием, в результате на выходе АЦП получаем сигнал, представленный в некотором цифровом коде.
Одним из основных параметров кода является его основание, соответствующее выбранной системе счисления. Близко к оптимальным реализуются двоичные или бинарные коды, которые нашли наибольшее распространение в связи.
Известно большое количество различных устройств преобразования непрерывного сообщения в бинарный код. Все их можно разбить на три основные группы: преобразователи последовательного счета, поразрядного кодирования и преобразователи считывания. Наибольшее применение в связи нашли преобразователи первых двух типов.
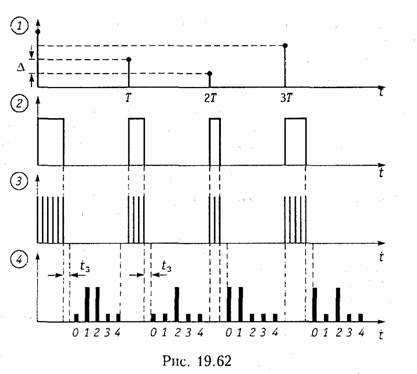
Принцип действия преобразователя последовательного счета с временным преобразованием иллюстрируется схемой изображенной на рис. 19.61 и временными диаграммами на рис. 19.62.
Кодирование в данной схеме осуществляется следующим образом. Аналоговый сигнал после дискретизации и квантования хц(t) поступает на вход широтно-импульсного модулятора (ШИМ), на выходе которого формируются прямоугольные импульсы ширина которых пропорциональна отсчету сигнала xц(t) в моменты kT (рис. 19.62). Далее этот ШИМ- сигнал подается на схему* «И», на второй вход которой поступают импульсы с генератора тактовой частоты (ГТИ). На выходе схемы «И» формируются импульсы, число которых в «пачке» пропорционально ширине импульса. Эти импульсы поступают в двоичный счетчик, где число их фиксируется в двоичной системе счисления. Задним фронтом ШИМ- импульса запускается устройство считывания результата, с выхода которого кодовая комбинация поступает в ВУ. Считывание может осуществляться последовательно или параллельно (последовательный пли параллельный код).
На рис. 19.62 приведен вид кодовой группы на выходе при последовательном считывании. Для возвращения двоичного счетчика в исходное состояние на него через линию задержки ЛЗ с τ3 = τ счит подается сигнал сброса, формируемый задним фронтом ШИМ- импульса. С приходом следующего измерительного импульса работа кодера повторяется.
Аналогичным образом можно кодировать и амплитудно — модулированную импульсную последовательность (кодер последовательного счета с частотным преобразованием). Для этого АИМ- сигнал подается на ЧМ- генератор (мультивибратор), и осуществляется счет импульсов этого генератора за фиксированные промежутки времени по рассмотренной выше схеме.
В преобразователях поразрядного кодирования производится последовательное сравнение выходного сигнала с набором эталонных напряжений, каждое из которых соответствует определенному разряду кода. В качестве эталонных напряжений используется геометрическая прогрессия вида

где N — число разрядов в бинарном коде. Причем Е > umах, где uтах — максимально возможное значение кодирующего сигнала.
При поразрядном кодировании вначале формируется старший разряд кода путем сравнения u(t) с Е/2 (например, если u(t)≥ E/2, то формируется символ «1», в противном случае — «0»). Одновременно на выходе схемы сравнения образуется напряжение u(t)-E/2 при u(t)≥E/2 или u(t) при u(t) 2 = Δ 2 /12, где Δ определяется числом используемых разрядов. Если принять, что источники eo(kT), e1(kT) н е2(kT) независимы, то дисперсия суммарного шума округления будет равна

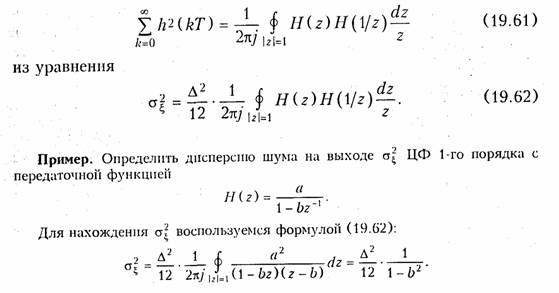
Для другой схемы реализации ЦФ результирующая  вычисляется в зависимости от того, куда будет подключен источник шума e(kT) и в общем случае может быть найден по формуле (19.60) или с учетом равенства Парсеваля
вычисляется в зависимости от того, куда будет подключен источник шума e(kT) и в общем случае может быть найден по формуле (19.60) или с учетом равенства Парсеваля
Кроме ошибок квантования и округления при синтезе ЦФ возникают ошибки, вызванные неточными значениями параметров фильтра. Эти ошибки особенно опасны в рекурсивных фильтрах высокого порядка, т. к. могут привести к потере устойчивости ЦФ, поэтому обычно используют звенья 1-го и 2-го порядков (см. § 19.5). Кроме рассмотренных выше при синтезе ЦФ возникают еще ряд дополнительных явлений, приводящих к погрешности цифровой фильтрации. К ним, например, относятся так называемые предельные циклы низкого уровня, представляющие собой периодические колебания, возникающие на выходе ЦФ при низком входном сигнале и обусловленные округлением результатов вычисления. Все эти явления и ошибки подробно исследуются в специальной литературе.
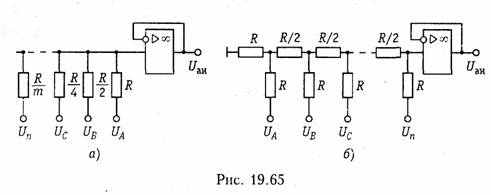
Цифро-аналоговое преобразование.Преобразование цифровых сигналов в аналоговый осуществляется с помощью различных цифро-аналоговых преобразователей (ЦАП). В основе простейшего ЦАП лежит принцип двоично-взвешенного суммирования напряжений или токов. На рис. 19.65 изображены схемы простейших ЦАП на базе резистивных цепей.
В ЦАП с двоично-весовыми резисторами (рис. 19.65, а) требуется меньшее число резисторов, однако при этом необходим целый ряд номиналов прецизионных сопротивлений. Аналоговое выходное напряжение Uан ЦАП определяется как функция двухуровневых входных напряжений:

где п — число разрядов ЦАП; т— коэффициент, зависящий от числа разрядов ЦАП.
Для обеспечения высокой точности работы резистивные цепи ЦАП должны работать на высокоомную нагрузку. Чтобы согласовать резистивные цепи с низкоомной нагрузкой, используют буферные усилители на основе операционных усилителей, показанные на рис. 19.65, а, б.
Интерполяторы.На выходе ЦАП сигнал обычно имеет форму последовательности импульсов модулированных по амплитуде (АИМ- сигнал). Для восстановления (демодуляции) из АИМ- последовательности аналогового сигнала достаточно использовать ФНЧ с частотой среза ωс = 2π/Т, где Т — частота дискретизации АИМ- сигнала. Существуют и более сложные интерполирующие устройства, которые описаны в специальной литературе.
В заключении следует отметить, что в связи с бурным развитием вычислительной, микропроцессорной техники цифровые методы обработки сигналов получают все большее распространение. Они имеют более широкие возможности реализации сложных и эффективных алгоритмов обработки сигналов, которые в большинстве своем недоступны для реализации аналоговыми цепями.