
Цель работы. Ознакомиться с основными характеристиками незатухающих и затухающих свободных механических колебаний.
Задача. Определить период собственных колебаний пружинного маятника; проверить линейность зависимости квадрата периода от массы; определить жесткость пружины; определить период затухающих колебаний и логарифмический декремент затухания пружинного маятника.
Приборы и принадлежности. Штатив со шкалой, пружина, набор грузов различной массы, сосуд с водой, секундомер.
1. Свободные колебания пружинного маятника. Общие сведения
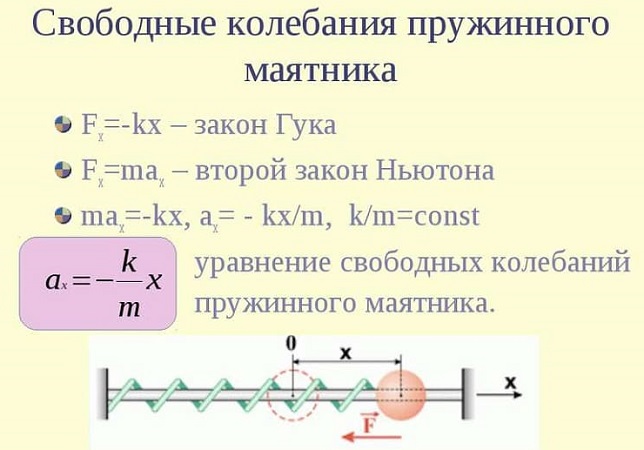
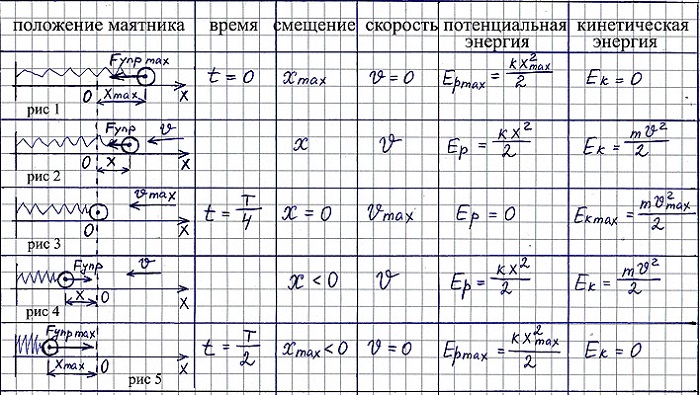
Колебаниями называются процессы, в которых периодически изменяется одна или несколько физических величин, описывающих эти процессы. Колебания могут быть описаны различными периодическими функциями времени. Простейшими колебаниями являются гармонические колебания – такие колебания, при которых колеблющаяся величина (например, смещение груза на пружине) изменяется со временем по закону косинуса или синуса. Колебания, возникающие после действия на систему внешней кратковременной силы, называются свободными.
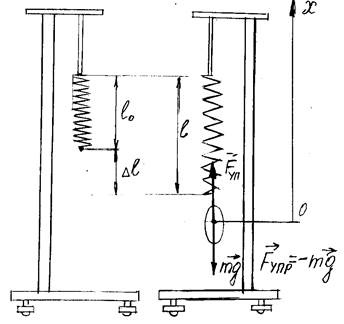
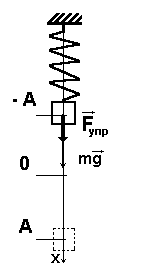
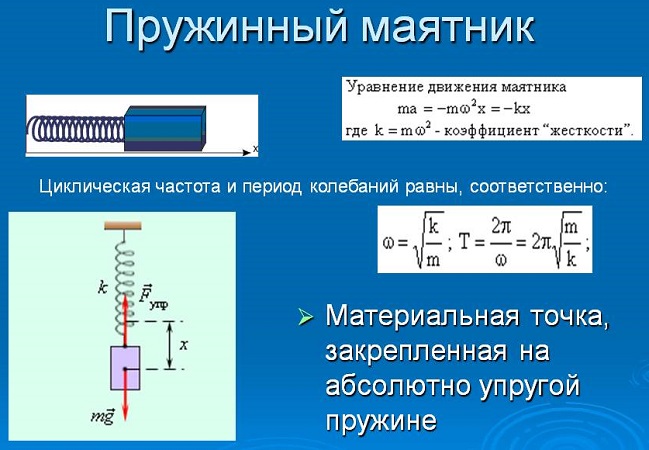
Рассмотрим одну из простейших колебательных систем – пружинный маятник, представляющий собой груз массой m, подвешенный на абсолютно упругой пружине с коэффициентом жесткости k
(рис. 1). Пусть l0 – длина пружины без подвешенного к ней груза. При подвешивании груза под действием силы тяжести пружина растянется на x1 так, что маятник будет находиться в положении равновесия вследствие равенства модулей силы тяжести mg и упругой силы Fупр: mg = kx1, стремящейся вернуть груз в положение равновесия (полагается, что деформации пружины идеально упругие и подчиняются закону Гука).


Если груз вывести из положения равновесия, отклонив на величину x, то сила упругости возрастает: Fупр = – kx2= – k(x1 + x). Дойдя до положения равновесия, груз будет обладать отличной от нуля скоростью и пройдет положение равновесия по инерции. По мере дальнейшего движения будет увеличиваться отклонение от положения равновесия, что приведет к возрастанию силы упругости, и процесс повторится в обратном направлении. Таким образом, колебательное движение системы обусловлено двумя причинами: 1) стремлением тела вернуться в положении равновесия и 2) инерцией, не позволяющей телу мгновенно остановиться в положении равновесия. В отсутствии сил трения колебания продолжались бы сколь угодно долго. Наличие силы трения приводит к тому, что часть энергии колебаний переходит во внутреннюю энергию и колебания постепенно затухают. Такие колебания называются затухающими.
Незатухающие свободные колебания
Сначала рассмотрим колебания пружинного маятника, на который не действуют силы трения – незатухающие свободные колебания. Согласно второму закону Ньютона c учетом знаков проекций на ось X
 (1)
(1)
Из условия равновесия смещение, вызываемое силой тяжести:  . Подставляя
. Подставляя  в уравнение (1), получим:
в уравнение (1), получим:  . Разделив правую и левую часть этого уравнения на m и принимая, что a = d2x/dt2, получим дифференциальное уравнение
. Разделив правую и левую часть этого уравнения на m и принимая, что a = d2x/dt2, получим дифференциальное уравнение
 . (2)
. (2)
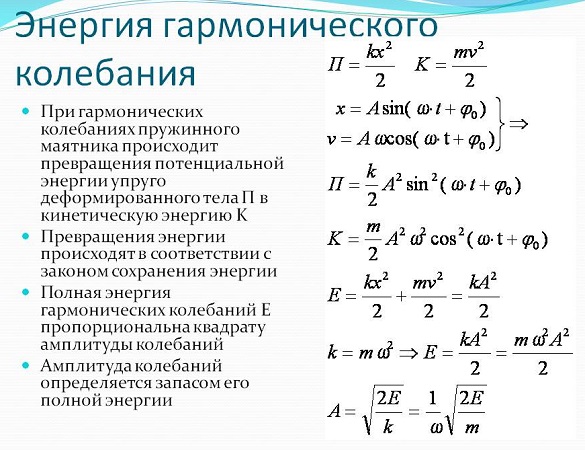
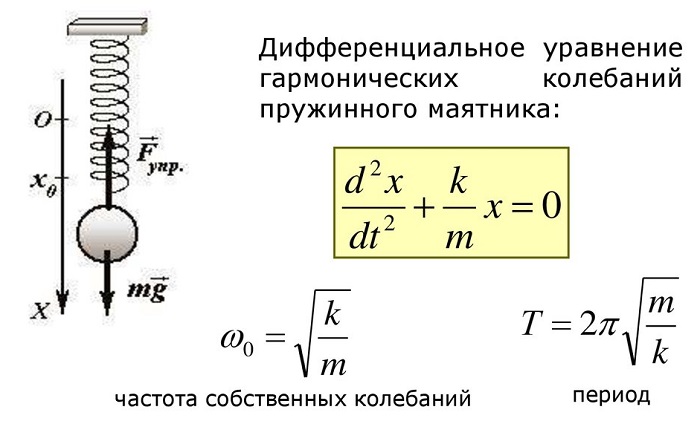
Это уравнение называется дифференциальным уравнением гармонических колебаний пружинного маятника. Из этого уравнения следует, что после прекращения внешнего воздействия, приводящего к первоначальному отклонению системы от положения равновесия, движение груза обусловлено только действием упругой силы (сила тяжести вызывает постоянное смещение).
Общее решение однородного дифференциального уравнения второго порядка (2) имеет вид
 . (3)
. (3)
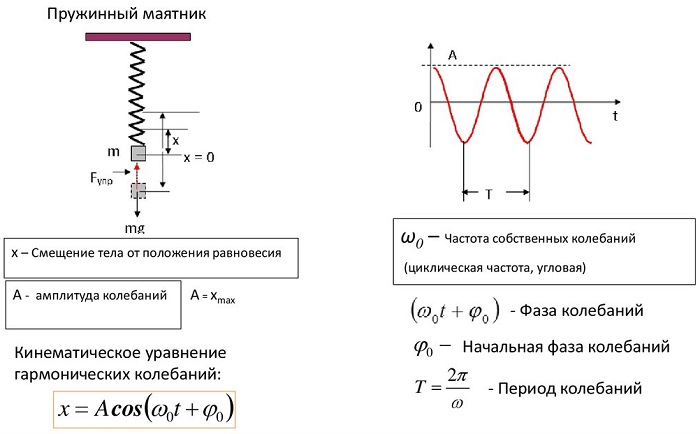
Данное уравнение называется уравнением гармонических колебаний. Наибольшее отклонение груза от положения равновесия А0 называется амплитудой колебаний. Величина  , стоящая в аргументе косинуса, называется фазой колебания. Постоянная φ0 представляет собой значение фазы в начальный момент времени (t = 0) и называется начальной фазой колебаний. Величина
, стоящая в аргументе косинуса, называется фазой колебания. Постоянная φ0 представляет собой значение фазы в начальный момент времени (t = 0) и называется начальной фазой колебаний. Величина
 (4)
(4)
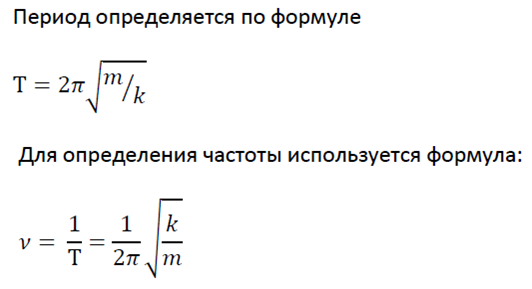
есть круговая или циклическая частота собственных колебаний, связанная с периодом колебаний Т соотношением  . Период колебаний определяется
. Период колебаний определяется
 . (5)
. (5)
Рассмотрим свободные колебания пружинного маятника при наличии силы трения (затухающие колебания). В простейшем и вместе с тем наиболее часто встречающемся случае сила трения пропорциональна скорости υ движения:
где r – постоянная, называемая коэффициентом сопротивления. Знак минус показывает, что сила трения и скорость имеют противоположные направления. Уравнение второго закона Ньютона в проекции на ось Х при наличии упругой силы и силы трения
Данное дифференциальное уравнение с учетом υ = dx/dt можно записать
 , (8)
, (8)
где  – коэффициент затухания; – циклическая частота свободных незатухающих колебаний данной колебательной системы, т. е. при отсутствии потерь энергии (β = 0). Уравнение (8) называют дифференциальным уравнением затухающих колебаний.
– коэффициент затухания; – циклическая частота свободных незатухающих колебаний данной колебательной системы, т. е. при отсутствии потерь энергии (β = 0). Уравнение (8) называют дифференциальным уравнением затухающих колебаний.
Чтобы получить зависимость смещения x от времени t, необходимо решить дифференциальное уравнение (8). В случае малых затуханий ( ) решение уравнения можно записать следующим образом:
) решение уравнения можно записать следующим образом:
 , (9)
, (9)
где А0 и φ0 – начальная амплитуда и начальная фаза колебаний;
 – циклическая частота затухающих колебаний при ω >>
– циклическая частота затухающих колебаний при ω >>  ω ≈ ω0.
ω ≈ ω0.
Движение груза в этом случае можно рассматривать как гармоническое колебание с частотой ω и переменной амплитудой, меняющейся по закону:
 . (10)
. (10)
На графике функции (9), рис. 2, пунктирными линиями показано изменение амплитуды (10) затухающих колебаний.

Рис. 2. Зависимость смещения х груза от времени t при наличии силы трения
Для количественной характеристики степени затухания колебаний вводят величину, равную отношению амплитуд, отличающихся на период, и называемую декрементом затухания:
 . (11)
. (11)
Часто используют натуральный логарифм этой величины. Такой параметр называется логарифмическим декрементом затухания:
 . (12)
. (12)
Если за время t‘ амплитуда уменьшается в n раз, то из уравнения (10) следует, что
 . (13)
. (13)
Отсюда для логарифмического декремента получаем выражение
 . (14)
. (14)
Если за время t‘ амплитуда уменьшается в е раз (е = 2,71 – основание натурального логарифма), то система успеет совершить число колебаний
 . (15)
. (15)
Следовательно, логарифмический декремент затухания – величина, обратная числу колебаний, совершаемых за то время, за которое амплитуда уменьшается в е раз. Чем больше θ, тем быстрее происходит затухание колебаний.
2. Методика эксперимента и экспериментальная установка

Рис. 3. Схема установки
Установка состоит из штатива 1 с измерительной шкалой 2. К штативу на пружине 3 подвешиваются грузы 4 различной массы. При изучении затухающих колебаний в задании 2 для усиления затухания используется кольцо 5, которое помещается в прозрачный сосуд 6 с водой.
В задании 1 (выполняется без сосуда с водой и кольца) в первом приближении затуханием колебаний можно пренебречь и считать гармоническими. Как следует из формулы (5) для гармонических колебаний зависимость T 2 = f (m) – линейная, из которой можно определить коэффициент жесткости пружины k по формуле
 , (16)
, (16)
где  – угловой коэффициент наклона прямой T 2 от m.
– угловой коэффициент наклона прямой T 2 от m.
Задание 1. Определение зависимости периода собственных колебаний пружинного маятника от массы груза.
1. Определить период колебаний пружинного маятника при различных значениях массы груза m. Для этого с помощью секундомера для каждого значения m трижды измерить время t полных n колебаний (n ≥10) и по среднему значению времени  вычислить период
вычислить период  . Результаты занести в табл. 1.
. Результаты занести в табл. 1.
2. По результатам измерений построить график зависимости квадрата периода T2 от массы m. Из углового коэффициента графика определить жесткость пружины k по формуле (16).
Результаты измерений для определения периода собственных колебаний
 , с
, с
 , с
, с
- Вынуяеденные колебания. Резонанс
- Вывод дифференциального уравнения вынуяеденных колебаний пружинного маятника
- Определение декремента затухания , силы сопротивления вязкой среды, и добротности колебательной системы при колебаниях подвешенного на пружине тела в вязкой среде
- Пружинный маятник — формулы и уравнения нахождения величин
- Что такое пружинный маятник
- Виды пружинных маятников
- Сила упругости в пружинном маятнике
- Уравнения колебаний пружинного маятника
- Период и частота свободных колебаний пружинного маятника
- Амплитуда и начальная фаза пружинного маятника
- Энергия пружинного маятника
- Дифференциальное уравнение гармонических колебаний пружинного маятника
Вынуяеденные колебания. Резонанс
В реальных колебательных системах всегда имеют место потери энергии, что приводит к затуханию колебаний. Система совершает незатухающие колебания, когда на неё действует внешняя, периодически изменяющаяся сила, компенсирующая потери энергии.
Колебания, возникающие в системе под действием периодической внешней силы, называются вынуяеденными. Переменная внешняя сила, приложенная к колебательной системе и вызывающая вынужденные колебания, называется вынуждающей силой F (О-
В колебательном контуре компенсируются потери энергии, если в контур включён источник электрической энергии, основными характеристиками которого являются электродвижущая сила (ЭДС) и внутреннее сопротивление.
Источник электрической энергии в электротехнике называют источником ЭДС (источником напряжения). В механических системах потери энергии компенсируются работой внешних сил по преодолению сил трения.
Вывод дифференциального уравнения вынуяеденных колебаний пружинного маятника
Вынужденные колебания пружинного маятника происходят под действием вынуждающей силы F ehm.(t), изменяющейся со временем t по гармоническому закону с циклической частотой со

где F вын.(0 — мгновенное значение (в момент времени г) вынуждающей силы,
F т.вын — амплитуда колебаний вынуждающей силы.
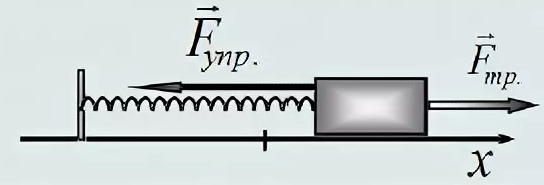
На колебательную систему, кроме вынуждающей силы F вын, одновременно действуют упругая сила Fvnp и сила трения Fmp, равные

где к — коэффициент упругости пружины, г — коэффициент пропорциональности.
Уравнение движения тела массой пружинного маятника, по второму закону Ньютона, имеет вид 
Пусть маятник движется вдоль оси о х (рис. 190). Запишем уравнение (19.81) в проекции на ось ох

разделим уравнение на т — массу тела и  введём обозначения
введём обозначения
тогда получим дифференциальное уравнение вынужденных колебаний пружинного маятника

Вывод дифференциального уравнения вынужденных колебаний в электрическом колебательном контуре
В реальном электрическом колебательном контуре электрическое сопротивление R отлично от нуля (рис.191). Поэтому, если возникают свободные колебания в контуре, то они постепенно затухают.
Формула закона Ома для участка цепи 1 -R-L-2 имеет вид

где (g>i — q>2) — разность потенциалов обкладок конденсатора,
равная qjj— (р-> = iL,
С q — электрический заряд на обкладках конденсатора,
С — ёмкость конденсатора,
J — сила электрического тока, J = С 1Я_,
Е (t) — электродвижущая сила (ЭДС) внешнего источника напряжения

Запишем уравнение (19.83) в виде

затем разделим на индуктивность катушки L и введём обозначения

где р — коэффициент затухания свободных колебаний,
а>0 — циклическая частота свободных затухающих колебаний, когда
сопротивление R контура равно нулю (R = 0).

Подставим эти обозначения в (19.84)
Формула (19.85) представляет собой дифференциальное уравнение вынуяеденных колебаний в электрическом колебательном контуре.
Уравнения (19.85) и (19.82) аналогичны друг другу, поэтому заменим их уравнением вида
электрического колебательного контура S = q, 2ft = ,со0 = 1 .
Уравнение (19.86) является линейным неоднородным (с правой частью, отличной от нуля) дифференциальным уравнением второго порядка. Общее решение этого уравнения представляет собой сумму решения однородного уравнения (S одн) и частного решения (S част) неоднородного уравнения
Однородное уравнение для колеблющейся величины S имеет вид


Для пружинного маятника S = х, 2/3 = —,со0 2 = —, F0 =f т.вЬ1Н, а Д ля
где частота со равна
Уравнение (19.88) описывает собственные затухающие колебания величины S. Они прекращаются через некоторый интервал времени (множитель е убывает со временем по экспоненте, поэтому им можно пренебречь).
Величина S совершает незатухающие (установившиеся во времени) вынужденные колебания, описываемые частным решением уравнения (19.87) 
где А — амплитуда колебаний, А = S тах,
со — циклическая частота колебаний, равная циклической частоте вынуждающей силы,
А ср — сдвиг по фазе между вынуждающей силой и вынужденными колебаниями.
На рис. 192 показан график установившихся вынужденных колебаний величины S. Характер вынужденных колебаний определяется, как величиной внешней силы, так и свойствами колебательной системы. Собственные затухающие колебания имеют место в течение интервала времени t = t раск , когда происходит раскачка колебательной системы.

Время раскачки t раск зависит от коэффициента затухания Д чем меньше величина Д тем больше это время. Когда прекращаются собственные затухающие колебания, система совершает вынужденные (незатухающие) установившиеся колебания.
Характер вынужденных колебаний изменяется со временем, когда начинает действовать внешняя периодическая сила. Только через некоторое время устанавливаются вынужденные колебания, период Т которых равен периоду внешней силы. Вынужденные колебания возникают тем быстрее, чем больше затухание собственных колебаний в колебательной системе.
Для вывода формул, определяющих амплитуду А установившихся вынужденных колебаний и сдвиг по фазе А C L_§_ в уравнение (19.86)

Каждое слагаемое в данном уравнении описывает гармонически изменяющуюся величину, но для всех слагаемых одинаковая частота со и различные фазы колебаний.

Первое слагаемое на векторной диаграмме (рис. 193) изображается вектором, длина которого равна А со ”. Он направлен в отрицательном направлении горизонтальной оси (противоположно вектору, представляющему третье слагаемое). Третье слагаемое, стоящее в левой части уравнения, представлено на векторной диаграмме вектором, длиной А со0 2 , направленным по горизонтальной оси в положительном направлении (вправо).
Второе слагаемое на векторной диаграмме изображается вектором длиной, равной 2А /> со. Этот вектор повёрнут от
горизонтальной оси на угол 71 против часовой стрелки.
На рис. 194,195 представлен результат сложения трёх векторов, когда со со0.
Векторная сумма векторов с длинами, равными 2А [3 со и А со0 2 должна быть равна вектору длиной F0 (рис. 194).

Результат сложения векторов зависит от соотношения частот со
и С0о. Суммарный вектор длиной F0 является диагональю
прямоугольника со сторонами 2А /3 со и А (со0 со ). Он составляет с
горизонтальной осью угол А соа. В формуле стоит квадрат выражения (со 2 ,, — со 2 ) 2 .

Согласно (19.90), амплитуда А вынужденных колебаний зависит от соотношения собственной частоты со0 и частоты со вынуждающей силы, а так же от коэффициента затухания /1. Заметим, что увеличение амплитуды колебаний ограничено, независимо от соотношения частот со0 и со. Это объясняется тем, что с ростом амплитуды увеличивается скорость колебательного движения, а вместе с ней и сила трения (сила сопротивления). Колебательная система интенсивно расходует энергию. Тогда амплитуда автоматически принимает значение, при котором прибыль энергии извне компенсирует расходы на преодоление трения (на излучение и др.).
Сдвиг по фазе А ср, как следует из векторной диаграммы, определяется формулой


Из формул (19.90) и (19.91) следует, что амплитуда А вынужденных колебаний и сдвиг по фазе А ср между вынужденными колебаниями и вынуждающей силой определяются параметрами, характеризующими вынуждающую силу, такими, как амплитуда А, частота со, а так же параметрами колебательной системы, а именно, собственной частотой колебаний со0, коэффициентом затухания /1.
В механической колебательной системе (пружинный маятник) величины А и А ср зависят от массы т колеблющего тела, а у электрического колебательного контура — индуктивности L катушки. Амплитуда А и сдвиг по фазе А ср установившихся вынужденных колебаний не зависят от времени t и начальных условий.
Вынужденные колебания отстают по фазе от вынуждающей силы, вызывающей их, на величину А ср, зависящую от частоты со вынуждающей силы, которая периодически изменяется во времени. Объясним, почему это происходит на примере механической колебательной системы (пружинного маятника).
Считаем, что в начальный момент времени (t = 0) он покоится. Вынуждающая сила F (?) равна нулю. Затем внешняя сила F (?) смещает тело массы т из положения равновесия, совершая положительную работу.
Через четверть периода (t = Т_) величина внешней силы F (7) и
смещения х достигают максимального значения. Затем, внешняя сила убывает со временем, а тело под действием возвращающей силы (силы упругости F у„р) движется к положению равновесия.
При отсутствии внешней силы тело вернулось бы в положение равновесия (начальное положение) через промежуток времени, равный четверти собственного периода колебаний.
В реальных условиях внешняя сила, убывая по величине со временем, тормозит движение тела. Она совершает отрицательную работу.
Тело движется замедленно, скорость его уменьшается. Колебания пружинного маятника начинают отставать от колебаний вынуждающей силы, опережающей смещение тела.
Следует заметить, что параметры, характеризующие вынужденные колебания, происходящие под действием внешней периодической силы, определяются добротностью Q.
Определение декремента затухания , силы сопротивления вязкой среды, и добротности колебательной системы при колебаниях подвешенного на пружине тела в вязкой среде
Лабораторная работа № 128
ИЗУЧЕНИЕ ЗАТУХАЮЩИХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ
ПРУЖИННОГО МАЯТНИКА
Цель работы:
Определение декремента затухания , силы сопротивления вязкой среды, и добротности колебательной системы при колебаниях подвешенного на пружине тела в вязкой среде.
Метод измерения и расчётные соотношения.
Пружинным маятником называется система, состоящая из упругой пружины и груза подвешенного на ней. В общем случае движение пружинного маятника в поле силы тяжести довольно сложно и описывается большим числом степеней свободы. Практический интерес, однако, представляют колебания с одной степенью свободы, когда движение маятника происходит вдоль вертикальной оси.
 |
| Рис.1 |
Для полного описания колебаний в этом случае необходимо знать поведение только одной переменной, например, вертикальной координаты центра масс тела маятника. Теоретически пружинный маятник может совершать незатухающие механические колебания при условии, что пружина является идеально упругой, а тело движется в окружающей среде без трения. На тело, подвешенное на пружине в поле силы тяжести, действуют две силы (без учета сил трения) сила тяжести  и упругая сила
и упругая сила  . Начало координат выберем в центре тяжести тела. При этом сила тяжести будет скомпенсирована некоторым начальным растяжением пружины Δl в дальнейшем рассмотрении участвовать не будет.
. Начало координат выберем в центре тяжести тела. При этом сила тяжести будет скомпенсирована некоторым начальным растяжением пружины Δl в дальнейшем рассмотрении участвовать не будет.
При отклонении тела от точки равновесия будет возникать возвращающая сила F(х). Рассмотрим колебания пружинного маятника с малой амплитудой. Для пружинного маятника условия малости колебаний удовлетворяются при смещениях, Уравнение движения пружинного маятника при этом имеет вид
 | (1) |
где: k — коэффициент жесткости пружины, m — масса маятника. 
Если физическая величина x(t) изменяется со временем по гармоническому закону
то колебания называются гармоническими. В функции (2) А — амплитуда колебаний;w — круговая частота
 |
T — период колебаний; t — время , пошедшее от начала колебаний; φ0—начальная фаза колебаний. Функция х<t) из (1) представляет решение дифференциального уравнения
 | (3) |
называемого уравнением свободных колебаний. Физическую систему, выведенную из состояния равновесия и представленную самой себе, в которой изменение одного из параметров х описывается дифференциалльным уравнением (3) называют классическим гармоническим осциллятором. Сравнивая (2) с (2), получим
 | (4) |
В реальных осцилляторах, за счет сил сопротивления ( в большей степени трения), происходит рассеяние (диссипация) запасенной энергии, в результате чего свободные колебания со временем затухают. Если жидкость неподвижна, а скорость движения тела невелика, то перемещение тела не оказывает влияния на удалённые слои жидкости. Взаимодействие происходит только со слоем, непосредственно соприкасающимся с телом. При движения пружинного маятника в вязкой среде, с небольшими скоростями сила сопротивления пропорциональна скорости движения
 | (5) |
где коэффициент r зависит от вязкости среды и площади соприкосновения поверхности S
тела с жидкостью
ηS
где η – коэффициент внутреннего трения жидкости ( динамическая вязкость жидкости)
Дж. Стокс эмпирически установил, что для тел сферической формы радиуса R коэффициент сопротивления равен  . Следовательно, сила сопротивления среды равна
. Следовательно, сила сопротивления среды равна
 | (7) |
При равномерном движении сферы в идеальной (не вязкой) жидкости, она не испытывает никакого сопротивления. Выводы Стокса для сферы верны также для эллипсоида вращения и других тел с подобными поверхностями.
Сила Архимеда, действующая, на груз и направленная в одну и ту же сторону, будет скомпенсирована некоторым начальным растяжением пружины Δl в дальнейшем рассмотрении участвовать не будет.
Для описания движения груза пружинного маятника в вязкой среде необходимо в правую часть уравнения (1) величину силы трения (5). Поэтому свободные колебания будут затухающими (следовательно, не гармоническими). В результате второй закон динамики для механического осциллятора при наличии вязкого трения можно записать так:
 | (8) |
где  — коэффициент затухания;
— коэффициент затухания;  — собственная частота незатухающих колебаний.
— собственная частота незатухающих колебаний.
Можно показать, что решением этого уравнения является функция
 | (9) |
где  — частота затухающих колебаний .
— частота затухающих колебаний .
Отношение двух соседних амплитуд  называется декрементом затухания.
называется декрементом затухания.
Величина  — называется логарифмическим декрементом затухания.
— называется логарифмическим декрементом затухания.
По истечение N колебаний эта величина определяется по формуле
 | (10) |
Энергия пружинного маятника пропорциональна квадрату амплитуды колебаний
 | (11) |
где  — энергия пружины при максимальной начальной амплитуде, то есть начальный запас энергии пружинного маятника.
— энергия пружины при максимальной начальной амплитуде, то есть начальный запас энергии пружинного маятника.
Потеря энергии маятника за период равна
 | (12) |
Из (10) и (11) следует
 | (13) |
При малых затуханиях  и соотношение (12) можно преобразовать к виду
и соотношение (12) можно преобразовать к виду
 | (14) |
Описание схемы установки.
На Рис. 2 представлена схема установки. На платформе 1 расположены стойка 3, к которой подвешена пружина 8, стеклянный цилиндр с жидкостью 4, секундомер 2 для отсчёта числа колебаний за установленные интервалы времени, инфракрасный датчик 9 для отсчёта числа колебаний флажка 7, закреплённого на штоке 6. На штоках 6 крепятся грузы — металлический шар или эллипсоид. Консоль 11 держит подвесную систему.
Для проведения опытов необходимы следующие средства измерений:
1 .Электронный секундомер с точностью отсчёта ± 0,01с , для измерения времени и установленного числа колебаний груза. В установке используется программируемый электронный секундомер, измеряющий число прохождений флажка 7 через луч датчика 9 за установленное время (10 секунд).
2. Линейка с миллиметровой шкалой 10, закреплённая на стойке 3, для измерений смещений груза по вертикали.
Выполнение работы.
1. Вращением ножек основания установить стойку 3 в вертикальное положение.
2. Измерить с помощью линейки длину пружины без груза  .
.
3. Установить консоль 11 так чтобы подвесная система находилась вне цилиндра 4, закрепить на конце пружины шток 6 с выбранным грузом (металлические шар или эллипсоид известной массы) и измерить длину пружины с грузом  , отсчитав положения её первого и последнего витка по миллиметровой шкале.
, отсчитав положения её первого и последнего витка по миллиметровой шкале.
4. Установить консоль 11 так, чтобы подвесная система находилась внутри цилиндра 4.
5. Включить секундомер 2.
6.С помощью штока 6 переместить груз вертикально вниз до момента пересечения флажком 7 луча датчика 11. При этом измеритель числа колебаний должен показать О. Произвести отсчёт на миллиметровой шкале 12 положения флажка 7 ( начальное отклонение груза  от положения равновесия).
от положения равновесия).
7. Отпустить шток 6 и привести в движение маятник.
8. По истечении установленного времени (10 секунд отсчитываются прибором автоматически и не показываются на табло счётчика) записать показания электронного счётчика, который измерит число Z прохождений флажка через луч датчика 9 за десять секунд.
9. Нажать кнопку 13 электронного счётчика. При этом он покажет общее число прохождений флажка 7 через луч датчика 9 от начала процесса колебаний.
 |
| Рис. 2 |
10.Произвести отсчёт амплитуды выбранного последнего колебания  флажком 7 на шкале
флажком 7 на шкале
11. Для статистической обработки измеренных величин пункты 6 и 10 повторить не менее 5 раз.
12. Повторить для двух грузов – шара и эллипсоида.
Пружинный маятник — формулы и уравнения нахождения величин
Пружинный маятник — колебательная система, которая состоит из тела, подвешенного к пружине. Эта система способна к совершению свободных колебаний.
Подобные системы довольно широко распространены за счет своей функциональной гибкости. Механизмы на основе таких маятников часто используются как элементы средств автоматики.
В том числе они нашли применение в контактных взрывателях различных боеприпасов, в качестве акселерометров в контурах управления ракет. Так же они активно используются в предохранительных клапанах, устанавливаемых в трубопроводах.
Что такое пружинный маятник
Пружинным маятником в физике называют систему, совершающую колебательные движения под действием силы упругости.
Приняты следующие обозначения:
k — коэффициент жесткости пружины.
Общий вид маятника:
Особенностями пружинных маятников являются:
Сочетание тела и пружины. Массой пружины обычно в расчетах пренебрегают. Роль тела могут играть различные объекты. На них оказывают действие внешние силы. Груз может крепиться разными способами. Витки пружины, которыми она начинается и заканчивается, изготавливают с учетом повышенной нагрузки;
У любой пружины есть исходное положение, предел сжатия и растяжения. При максимальном сжатии зазора между витками нет. Когда она максимально растянута, возникает необратимая деформация;
Полная механическая энергия появляется с началом процесса обратимого деформирования. В этот момент на объект не оказывает действие сила упругости;
Колебательные движения происходят под влиянием силы упругости. Масштаб влияния определяется несколькими причинами (тип сплава, расположение витков и т. д.). Так как может происходить и сжатие и растяжение, можно сделать вывод, что сила упругости действует в двух противоположных направлениях;
От массы тела, величины и направления прикладываемой силы зависит скорость в плоскости его перемещения. Например, если подвесить груз к пружине и, растянув её, отпустить, то груз будет перемещаться в двух плоскостях: вертикально и горизонтально.
Виды пружинных маятников
Существует два типа данной системы:
Вертикальный маятник — на тело довольно сильно влияет сила тяжести. Это влияние обуславливает увеличение инерционных движений, которые совершает тело в исходной точке.
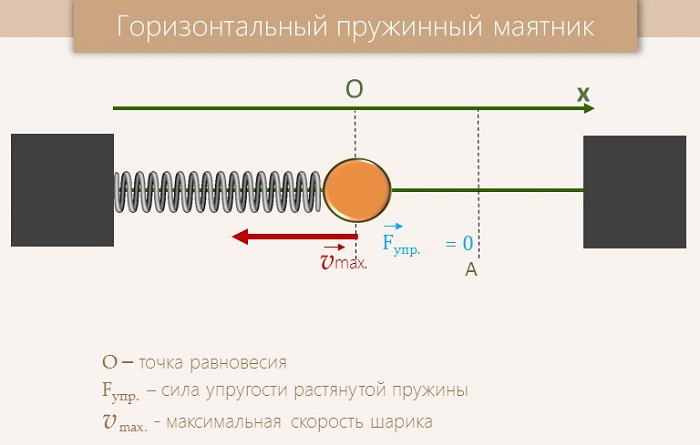
Горизонтальный — в таком варианте при движении на груз начинает действовать сила трения, возникающая по причине того, что груз лежит на поверхности.
Сила упругости в пружинном маятнике
До начала деформирования пружина находится в равновесном состоянии. Прикладываемое усилие может как растягивать, так и сжимать её.
Применяя к пружинному маятнику закон сохранения энергии, мы можем рассчитать силу упругости в нем. Упругость прямо пропорциональна расстоянию, на которое сместился груз.
Расчёт силы упругости может быть проведен таким образом:
где k — коэффициент жесткости пружины (Нм),
Уравнения колебаний пружинного маятника
Свободные колебания пружинного маятника описываются с помощью гармонического закона.
Если допустить вероятность того, что колебания идут вдоль оси Х, и при этом выполняется закон Гука, то уравнение примет вид:
F(t) = ma(t) = — mw2x(t),
где w — радиальная частота гармонического колебания.
Для проведения расчета колебаний, учитывая все вероятности, применяют следующие формулы:
Период и частота свободных колебаний пружинного маятника
При разработке проектов всегда определяется период колебаний и их частота. Для их измерения используются известные в физике формулы.
Изменение циклической частоты покажет формула, приведенная на рисунке:
Факторы, от которых зависит частота:
Коэффициент упругости. На этот коэффициент влияет количество витков, их диаметр, расстояние между ними, длина пружины, жесткость используемого сплава и т. д.
Масса груза. От этого фактора зависит возникающая инерция и скорость перемещения.
Амплитуда и начальная фаза пружинного маятника
Учитывая начальные условия и рассчитав уравнение колебаний, можем точно описать колебания пружинного маятника.
В качестве начальных условий используются: амплитуда (А) и начальная фаза колебаний (ϕ).
Энергия пружинного маятника
При рассмотрении колебания тел учитывают, что груз движется прямолинейно. Полная механическая энергия тела в каждой точке траектории является константой и равняется сумме его потенциальной энергии и кинетической энергии.

Расчет имеет особенности. При его проведении нужно учитывать несколько условий:
Колебания проходят в двух плоскостях: вертикальной и горизонтальной.
В качестве равновесного положения выбирается ноль потенциальной энергии. Находясь в этом положении пружина сохраняет свою форму.
Влияние силы трения при расчете не учитывают.
Дифференциальное уравнение гармонических колебаний пружинного маятника
Отметим, что пружинный маятник — это обобщенное определение. Скорость движения груза (тела) напрямую зависит от комплекса условий, в том числе приложенного к нему усилия.