
- Метод решения задач
- Дифференциальные уравнения движения точки
- Решение дифференциальных уравнений при действии постоянных сил
- Задача
- Условие задачи
- Решение задачи
- 1. Движение материальной точки на участке AB
- 2. Движение материальной точки на участке BC
- Две основные задачи динамики точки в теоретической механике
- Первая задача
- Вторая задача
- Две основные задачи динамики
- Прямая и обратная задачи динамики
- Дифференциальные уравнения движения точки в прямоугольных координатах
- Постоянные интегрирования
- Задача №1
- Задача №2
- Задача №3
- Задача №4
- Задача №6
- Задача №7
- Уравнения движения точки в полярных координатах
- iSopromat.ru
- Дифференциальные уравнения движения точки
- 🎥 Видео
Видео:Дифференциальные уравнения движения точкиСкачать

Метод решения задач
Дифференциальные уравнения движения точки
Здесь мы рассмотрим движение материальной точки под действием постоянных сил. Пусть на точку массой m действуют n сил , которые постоянны на протяжении всего движения точки. Тогда удобно использовать равнодействующую , равную их векторной сумме:
.
Выберем инерциальную декартову систему координат Oxyz с началом в некоторой точке O . Закон движения точки в ней определяется вторым законом Ньютона:
(1) .
Здесь – радиус-вектор точки. То есть вектор, приведенный из начала координат O к материальной точке.
Проектируя векторное уравнение (1) на оси системы координат, получим систему дифференциальных уравнений, описывающих движение точки:
(2) .
Решение дифференциальных уравнений при действии постоянных сил
Если силы постоянны, то и их векторная сумма также постоянна. В этом случае уравнения (2) не зависят друг от друга. Поэтому каждое из этих уравнений можно решать отдельно от остальных. Рассмотрим уравнение для координаты x :
(3) .
Найдем его решение.
Разделим уравнение (3) на m и введем обозначение:
.
Тогда уравнение (3) примет более простой вид:
(4) .
Введенная нами величина является проекцией ускорения точки на ось x . В рассматриваемом нами случае постоянных сил, ускорение также постоянно.
Вторая производная координаты x по времени – это производная проекции скорости на ось x по времени. При этом применяют следующие обозначения:
(5) .
Проекция скорости на ось x – это производная координаты по времени:
(6) .
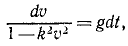
Найдем закон изменения со временем проекции скорости материальной точки на ось x : . Подставим (5) в (4):
.
Это простое дифференциальное уравнение с разделяющимися переменными. Перепишем его в следующем виде:
.
Интегрируем, используя таблицу неопределенных интегралов.
.
Здесь – постоянная интегрирования, которая определяется из начальных условий. Поскольку тоже постоянная, то, чтобы придать решению более простой вид, заменим на . В результате получим закон изменения проекции скорости на ось x :
(7) .
Как видно, скорость является линейной функцией от времени. Тот факт, что зависит от времени, можно записать так:
.
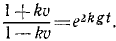
Зная значение в определенный момент времени, можно определить значение постоянной . Пусть, например, нам известно, что в начальный момент времени , проекция скорости на ось x равняется . Подставим в (7) :
.
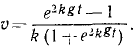
Отсюда . Тогда закон изменения проекции скорости на ось x имеет определенный вид:
.
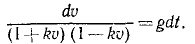
Теперь найдем закон изменения координаты точки x от времени: . Из (6) и (7) имеем:
;
.
Это также дифференциальное уравнение с разделяющимися переменными. Интегрируем с помощью таблицы интегралов.
.
Итак, мы получили закон изменения координаты от времени:
(8) .
Здесь – постоянные интегрирования. Их можно найти, зная скорость и координату, в какой-либо момент времени.
Пусть, например, в начальный момент времени , координата равна , и проекция скорости точки на ось x равна . Ранее мы уже нашли значение постоянной для этого случая: . Подставим в (8):
.
Подставим сюда :
.
Отсюда .
Тем самым мы получили закон изменения x координаты от времени:
.
Уравнения движения (2) для остальных переменных y и z , при постоянных силах, решаются точно так же, как и для переменной x . Далее мы приводим пример решения задачи на интегрирование дифференциальных уравнений движения материальной точки при действии на нее постоянных сил.
Видео:Д1 Дифференциальные уравнения движения материальной точкиСкачать

Задача
Условие задачи
Груз S, рассматриваемый как материальная точка массы m = 5кг, движется по шероховатой поверхности от точки A до точки B, в которой отрывается от поверхности и продолжает движение в воздухе до падения на наклонную поверхность в точке C. Движение происходит в плоскости рисунка.
В точке A, груз имел скорость м/с. Скорость в точке B: м/с. Участок AB представляет собой плоскую поверхность с углом наклона α = 30° к горизонту. На участке AB, кроме силы тяжести и силы трения, на груз действует постоянная сила Н, направленная под углом φ = 45° к поверхности. Коэффициент трения f = 0,1 .
На участке BC, груз движется под действием только силы тяжести. Сопротивлением воздуха пренебречь. Поверхность, на которую падает груз, является плоской с углом наклона β = 15° к горизонту (см. рисунок). Точка D расположена ниже точки B на расстояние |BD| = h = 1 м .
Найти: Время движения на участке AB; длину этого участка; время падения от точки B к точке C; расстояние |DC|; уравнение траектории BC.
Решение задачи
1. Движение материальной точки на участке AB
1.1. Составление уравнения движения и определение ускорения
Рассмотрим движение груза S на участке AB. Как сказано в условии, его можно рассматривать как материальную точку. То есть считаем, что размерами груза можно пренебречь.
Выберем декартову систему координат с началом в точке A. Ось x направим от A к B; ось y – перпендикулярно. Пусть в начальный момент времени , груз находился в точке A.
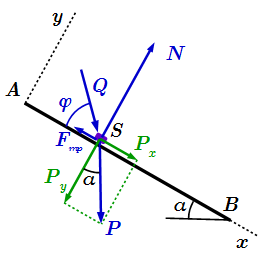
Силы, действующие на груз S на участке AB.
Рассмотрим силы, действующие на груз, и найдем их компоненты в выбранной системе координат Axy .
1) Сила тяжести , где м/с 2 – ускорение свободного падения. Она направлена вертикально вниз. Разложим ее на составляющие вдоль координатных осей по правилу параллелограмма: (см. рисунок). Поскольку вектор перпендикулярен горизонтали, а вектор перпендикулярен поверхности AB, то угол между векторами и равен углу между горизонталью и поверхностью движения, который по условию равен α . Тогда сила тяжести имеет следующие проекции на оси выбранной системы координат:
.
2) Заданная сила . По условию, она направлена под углом φ к поверхности (см. рисунок). Находим ее компоненты в системе координат Axy :
.
3) Сила давления поверхности . Она перпендикулярна поверхности. Поэтому ее компоненты:
.
4) Сила трения . Она направлена противоположно перемещению, то есть противоположно оси x . Абсолютная величина силы трения определяется по закону Амонта – Кулона:
(AB.1) .
Ее компоненты:
.
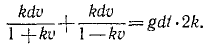
Составляем дифференциальные уравнения движения материальной точки:
.
Здесь мы учли, что движение происходит в плоскости xy . Поэтому уравнение для z компоненты тождественно обращается в нуль. Подставляем перечисленные выше компоненты внешних сил.
(AB.2) ;
(AB.3) .
Перемещение вдоль оси y отсутствует. Это означает, что координата y точки S остается постоянной при движении на участке AB. Тогда и все ее производные по времени равны нулю. Поэтому . Тогда из (AB.3) и (AB.1) имеем:
;
.
Разделим (AB.2) на m . В результате получим дифференциальное уравнение движения точки в следующем виде:
.
Вторая производная координаты по времени есть ускорение точки. Обозначим его как . Поскольку все действующие внешние силы постоянны, то ускорение постоянно.
.
В результате уравнение движения точки примет более простой вид:
(AB.4) ,
где – ускорение точки, постоянная величина.
1.2. Интегрирование уравнений движения
Итак, мы составили дифференциальное уравнение движения материальной точки S на участке AB:
(AB.4) ,
Теперь переходим к интегрированию этого уравнения.
Разберемся с обозначениями. У нас x – это координата точки, определяющая ее положение. Скорость точки – это производная координаты по времени t :
(AB.5) .
При , точка движется в сторону возрастания координаты x : от A к B. При – в противоположную сторону.
Ускорение – это производная скорости по времени, или вторая производная координаты по времени:
.
Определяем закон изменения скорости со временем. Для этого выразим уравнение (AB.4) через скорость :
.
Это простейшее дифференциальное уравнение с разделяющимися переменными. Интегрируем его, учитывая, что – это постоянная Для этого используем таблицу неопределенных интегралов.
;
;
(AB.6) .
Здесь – постоянная интегрирования. Найдем ее значение из условия, что в начальный момент времени , груз S находился в точке A и имел скорость в направлении оси x . Подставляем в (AB.6) , :
.
Отсюда . Тогда закон изменения скорости со временем принимает следующий вид:
(AB.7) .
Определяем время движения груза на участке AB. Для удобства, обозначим моменты времени, в которых груз находился в точках A и B, как и . Поскольку, по принятому нами соглашению, , то . Подставим в (AB.7) значения для точки B: . Тогда
. Отсюда
.
Теперь найдем зависимость координаты груза x от времени. Для этого воспользуемся тем, что скорость есть производная координаты по времени (см. (AB.5)):
.
Зависимость мы уже нашли: . Подставляем и интегрируем.
;
;
;
.
Здесь – постоянная интегрирования. Найдем ее из условия, что в начальный момент времени, , груз находился в точке A, в которой . Подставляем , :
.
Отсюда .
Тем самым мы нашли закон движения точки S на участке AB:
(AB.8) .
Определяем длину участка AB. Нам известно, что в момент времени , груз находился в точке A. В момент времени – в точке B. Также нам известен закон движения точки . Это позволяет найти длину участка AB:
.
1.3. Проверка решения
Сделаем проверку. Для этого воспользуемся теоремой об изменении кинетической энергии точки. Согласно этой теореме, Изменение кинетической энергии материальной точки, при переходе из точки A в точку B, равно сумме работ всех сил, приложенных к точке на этом перемещении:
(AB.9) .
Находим сумму проекций всех сил на ось x , приложенных к грузу на участке AB:
.
Находим сумму работ всех внешних сил, произведенных при перемещении груза из точки A в точку B.
.
Находим разность кинетических энергий груза при перемещении из точки A в точку B.
.
Подставим найденные значения в (AB.9):
.
Видно, что это уравнение выполняется. Различие имеется только в последней цифре. Это связано с округлениями, производимыми при вычислениях. Значит, этот этап решения выполнен верно.
2. Движение материальной точки на участке BC
2.1. Уравнения движения и их решения
Теперь рассмотрим движение груза S на участке BC. На этом участке мы выберем новую систему координат, и новый отсчет времени. Возьмем декартову систему координат с началом в точке B. Ось Bx направим по горизонтали; ось By – вертикально вверх (см. рисунок).
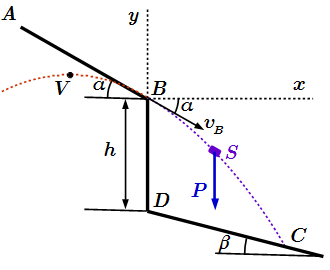
Движение груза на участке BC.
Началом движения, на участке BC, является точка B. Новый отсчет времени также будем производить от этой точки. Тогда в начальный момент времени , координаты груза равны нулю:
.
Нам известна скорость груза в точке B. Она имеет абсолютное значение , заданное в условии, и направлена вдоль прямой AB. И поэтому составляет угол α с горизонтальной осью Bx. Проекции скорости на оси координат равны:
.
На груз действует только одна сила тяжести , направленная вниз. Ее абсолютное значение . Выпишем ее компоненты в рассматриваемой системе координат (проекции силы тяжести на оси x и y):
.
Составляем уравнения движения.
.
Или
.
Разделим на m :
(BC1) ;
(BC2) .
Решаем первое уравнение (BC1). Сначала найдем закон изменения проекции скорости на ось x . Для этого, как и выше, используем следующие обозначения:
.
Выразим вторую производную в уравнении (BC1) через проекцию скорости на ось x :
;
.
Интегрируем это уравнение.
;
.
Здесь – постоянная интегрирования. Получилось, что проекция скорости груза на ось x не зависит от времени. Она постоянна для всех точек на участке BC. Поскольку нам известно значение в точке B, то . Тогда
(BC3) .
Теперь находим закон изменения координаты x от времени. Для этого воспользуемся тем, что . Подставляем в (BC3) и интегрируем.
;
;
.
Определяем постоянную интегрирования из начальных условий. В точке B . Подставляем :
.
Отсюда , и мы получаем закон изменения координаты x от времени:
(BC4) .
Аналогичным образом решаем второе уравнение:
(BC2) .
Находим закон изменения проекции скорости от времени. Используем следующие обозначения для проекции ускорения на ось y :
.
Выразим уравнение (BC2) через :
;
.
Интегрируем.
;
.
Находим значение постоянной интегрирования из начальных условий. При . Подставляем :
.
Отсюда . Так мы получили закон изменения проекции скорости на ось y :
(BC5) .
Находим закон изменения координаты y от времени. Подставляем в (BC5) и интегрируем.
;
;
.
Определяем постоянную интегрирования из начальных условий. В точке B . Подставляем :
.
Отсюда . И мы получаем закон изменения координаты y от времени:
(BC6) .
2.2. Определение координат точки C
Итак, мы получили закон движения материальной точки S в виде двух уравнений.
(BC4) ;
(BC6) .
Найдем положение точки C.
Для этого нам нужно найти уравнение прямой DC. В общем виде, уравнение прямой описывается по формуле:
(BC7) .
Здесь k – это угловой коэффициент, равный тангенсу угла наклона прямой к оси x . Положительным считается направление поворота от оси x против часовой стрелки. В нашем случае угол наклона отрицательный и равен . Поэтому
.
Найдем значение коэффициента b . Воспользуемся тем, что нам известны координаты точки D, принадлежащие прямой:
.
Подставим в (BC7):
;
.
Отсюда .
Таким образом, мы нашли уравнение прямой DC:
(BC8) ,
где .
Теперь найдем координаты точки C. Для этого нам нужно найти точку пересечения кривой, заданной уравнениями (BC4)–(BC6) и прямой (BC8). Координаты точки C удовлетворяют всем этим уравнениям:
(BC4) ;
(BC6) ;
(BC8) .
Решаем систему трех уравнений (BC4), (BC6) и (BC8). Подставляем (BC4) и (BC6) в (BC8) и выполняем преобразования:
;
.
Решаем квадратное уравнение. Подставляем численные значения.
;
;
;
.
Получаем корни уравнения:
.
Положительный корень дает момент времени, в который груз оказался в точке C . Это время движения по участку BC:
.
Находим значения координат точки C. Подставим найденное значение в (BC4):
.
Значение можно получить или из уравнения (BC6), или из (BC8). Поскольку последнее проще, то используем его:
.
Расстояние между точками D и C:
.
2.3. Траектория движения точки
Выше мы получили закон движения материальной точки S в виде двух уравнений.
(BC4) ;
(BC6) .
Теперь найдем уравнение ее траектории. Для этого мы должны исключить t из уравнений (BC4) и (BC6).
Из уравнения (BC4) находим:
.
Подставляем в (BC6) и выполняем преобразования.
;
;
;
.
Это уравнение параболы. Ее вершина V находится в точке с координатами
;
.
Фокальный параметр:
.
С этими обозначениями, уравнение параболы можно записать в каноническом виде:
.
.
Траектория движения груза на участке BC представляет собой параболу
с вершиной в точке V с координатами ,
и фокальным параметром .
Автор: Олег Одинцов . Опубликовано: 13-09-2020
Видео:18+ Математика без Ху!ни. Дифференциальные уравнения.Скачать

Две основные задачи динамики точки в теоретической механике
Содержание:
Две основные задачи динамики точки:
Используя дифференциальные уравнения движения материальной точки в. той или другой системе координат, можно решать две основные задачи динамики точки.
Видео:Дифференциальные уравнения движения материальной точкиСкачать

Первая задача
Зная массу точки и ее закон движения, можно найти действующую на точку силу. Действительно, если, например, заданы уравнения движения точки в декартовой системе координат

то проекции силы на оси координат определяются из дифференциальных уравнений движения точки (9), т. е.

Зная проекции силы на координатные оси, легко определить модуль силы и косинусы углов силы с осями координат.
Пример 1. Точка  , имеющая массу
, имеющая массу  (рис. 5), движется в плоскости
(рис. 5), движется в плоскости  так, что уравнениями ее движения являются
так, что уравнениями ее движения являются

где  ,
,  ,
,  — постоянные положительные величины;
— постоянные положительные величины;  — время.
— время.
Определить силу, под действием которой точка совершает это движение.
Решение. Найдем уравнение траектории точки в координатной форме, исключая время из уравнений движения:

Траекторией точки является эллипс с полуосями  и
и  .
.
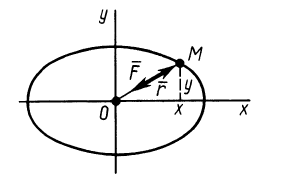
Рис. 5
На основании дифференциальных уравнений движения точки (10)

или, если ввести координаты движущейся точки,

где  —радиус-вектор движущейся точки. Косинусы углов силы
—радиус-вектор движущейся точки. Косинусы углов силы  с осями координат
с осями координат

Отсюда можно заключить, что сила  имеет направление, противоположное радиусу-вектору
имеет направление, противоположное радиусу-вектору  . Окончательно
. Окончательно
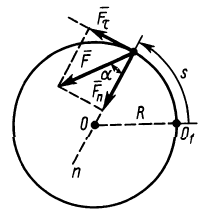
Рис. 6
Пример 2. Точка  , имеющая массу
, имеющая массу  (рис. 6), движется из состояния покоя по окружности радиусом
(рис. 6), движется из состояния покоя по окружности радиусом  с постоянным касательным ускорением
с постоянным касательным ускорением  . Определить действующую на точку силу в момент, соответствующий пройденному точкой по траектории расстоянию
. Определить действующую на точку силу в момент, соответствующий пройденному точкой по траектории расстоянию  .
.
Решение. Применяя дифференциальные уравнения движения точки в проекциях на естественные оси, имеем:

Так как движение происходит с постоянным касательным ускорением  без начальной скорости, то
без начальной скорости, то


В момент, когда  и, следовательно,
и, следовательно,  ,
,

Тангенс угла  между радиусом окружности и силой
между радиусом окружности и силой 

Из рассмотрения первой задачи динамики точки видно, что по заданной массе точки и уравнениям ее движения сила полностью определяется как по величине, так и по направлению.
Видео:Математика это не ИсламСкачать

Вторая задача
По заданной массе и действующей на точку силе необходимо определить движение этой точки. Рассмотрим решение этой задачи в прямоугольной декартовой системе координат. В общем случае сила  , а следовательно, и ее проекции на координатные оси могут зависеть от времени, координат движущейся точки, ее скорости, ускорения и т. д. Для простоты ограничимся случаем зависимости силы и ее проекций на оси координат от времени, координат и скорости. Дифференциальные уравнения движения точки (9) имеют вид
, а следовательно, и ее проекции на координатные оси могут зависеть от времени, координат движущейся точки, ее скорости, ускорения и т. д. Для простоты ограничимся случаем зависимости силы и ее проекций на оси координат от времени, координат и скорости. Дифференциальные уравнения движения точки (9) имеют вид

Для нахождения уравнений движения точки в декартовых координатах необходимо проинтегрировать систему трех обыкновенных дифференциальных уравнений второго порядка. Из теории обыкновенных дифференциальных уравнений известно, что решение одного дифференциального уравнения второго порядка содержит две произвольные постоянные. Для случая системы трех обыкновенных дифференциальных уравнений второго порядка имеется шесть произвольных постоянных:  .
.
Каждая из координат  движущейся точки после интегрирования системы уравнений (9) зависит от времени t и всех шести произвольных постоянных, т. е.
движущейся точки после интегрирования системы уравнений (9) зависит от времени t и всех шести произвольных постоянных, т. е.

Если продифференцировать уравнения (13) по времени, то определяются проекции скорости точки на координатные оси:

Таким образом, задание силы не определяет конкретного движения материальной точки, а выделяет целый класс движений, характеризующийся шестью произвольными постоянными. Действующая сила определяет только ускорение движущейся точки, а скорость и положение точки на траектории могут зависеть еще от скорости, которая сообщена точке в начальный момент, и от начального положения точки. Так, например, материальная точка, двигаясь вблизи поверхности Земли под действием силы тяжести, имеет ускорение  , если не учитывать сопротивление воздуха. Но точка будет иметь различные скорости и положение в пространстве в один и тот же момент времени и различную форму траектории в зависимости от того, из какой точки пространства началось движение и с какой по величине и направлению начальной скоростью.
, если не учитывать сопротивление воздуха. Но точка будет иметь различные скорости и положение в пространстве в один и тот же момент времени и различную форму траектории в зависимости от того, из какой точки пространства началось движение и с какой по величине и направлению начальной скоростью.
Для выделения конкретного вида движения материальной точки надо дополнительно задать условия, позволяющие определить произвольные постоянные, которых в общем случае будет шесть. В качестве таких условий обычно задают так называемые начальные условия, т.е. в какой-то определенный момент времени, например при  (рис. 7), задают координаты движущейся точки
(рис. 7), задают координаты движущейся точки 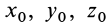 и проекции ее скорости
и проекции ее скорости  :
:

Рис. 7
Используя эти начальные условия и формулы (13) и (14), получаем шесть следующих уравнений для определения шести произвольных постоянных:
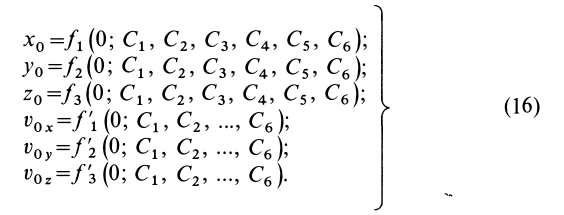
Если система уравнений (16) удовлетворяет условиям разрешимости, то из нее можно определить все шесть произвольных постоянных.
Начальные условия в форме (15) определяют единственное решение системы дифференциальных уравнений (9) при соблюдении соответствующих условий теории дифференциальных уравнений. Условия в других формах, как например, задание двух точек, через которые должна проходить траектория движущейся точки, могут дать или несколько решений, удовлетворяющих этих условиям, или не дать ни одного решения.
При движении точки в плоскости  имеется два дифференциальных уравнения движения. В решения этих уравнений входят четыре произвольные постоянные. Постоянные определяются из начальных условий
имеется два дифференциальных уравнения движения. В решения этих уравнений входят четыре произвольные постоянные. Постоянные определяются из начальных условий

В случае прямолинейного движения точки имеется только одно дифференциальное уравнение и в его решение входят две произвольные постоянные. Для их определения необходимо задать начальные условия:

Задача интегрирования системы дифференциальных уравнений (9′) при заданных начальных условиях в общем случае является довольно трудной. Даже в простейшем случае прямолинейного движения, когда имеется только одно дифференциальное уравнение, его решение удается выразить точно в квадратурах лишь при определенной зависимости силы от времени  , координаты
, координаты  и скорости
и скорости  . Поэтому важно определение таких соотношений из системы уравнений (9′), которые являются следствиями этой системы и в которые входят производные от координат точки только первого порядка. Такие соотношения, например, в виде
. Поэтому важно определение таких соотношений из системы уравнений (9′), которые являются следствиями этой системы и в которые входят производные от координат точки только первого порядка. Такие соотношения, например, в виде  называют первыми интегралами системы дифференциальных уравнений (9′).
называют первыми интегралами системы дифференциальных уравнений (9′).
Если из системы (9′) удается найти три независимых первых интеграла, то задача интегрирования упрощается, так как вместо интегрирования системы дифференциальных уравнений второго порядка достаточно проинтегрировать систему трех дифференциальных уравнений первого порядка, которую представляют эти первые интегралы.
В дальнейшем будет рассмотрен способ получения первых интегралов дифференциальных уравнений движения точки из так называемых общих теорем динамики в некоторых частных случаях движения точки.
Для выяснения особенностей решения второй основной задачи динамики, имеющей прикладное значение, рассмотрим ее решение для случая как прямолинейного, так и криволинейного движения материальной точки.
Две основные задачи динамики
Динамика имеет две основные задачи:
- по заданному движению определить действующие силы
- по заданным силам определить движение
Прямая и обратная задачи динамики
В динамике изучают механическое движение в связи с силами, приложенными к движущимся объектам. Следовательно, перед динамикой стоят две основные задачи:
- по движению материального объекта (точки, твердого тела или системы точек) определить силы, производящие, данное движение. Эту задачу называют прямой, или первой основной задачей динамики;
- вторая задача — обратная по отношению к первой, поэтому ее называют обратной, или второй основной задачей динамики: даны силы, действующие на данный материальный объект; требуется определить движение этого объекта под действием данных сил.
Наиболее просты с механической стороны эти задачи для одной материальной точки, хотя и здесь встречаются большие трудности математического характера.
Пусть точка M массы m находится под действием сил, представленных в мгновение t векторами  ,
, , . ,
, . ,  или их равнодействующей
или их равнодействующей  . Согласно основному закону динамики ускорение, получаемое точкой M от действия сил, направлено по силе и пропорционально ей:
. Согласно основному закону динамики ускорение, получаемое точкой M от действия сил, направлено по силе и пропорционально ей:
 (123)
(123)
Если решают первую основную задачу динамики точки и движение точки определено в векторной форме, т. е. дан радиус-вектор  как некоторая векторная функция времени t:
как некоторая векторная функция времени t:
 (54)
(54)
то надо определить по (57) ускорение  , выражающееся второй производной от радиуса-вектора точки по времени t, и умножить его на массу т точки. Тогда мы получим следующее выражение основного закона динамики:
, выражающееся второй производной от радиуса-вектора точки по времени t, и умножить его на массу т точки. Тогда мы получим следующее выражение основного закона динамики:
 (125)
(125)
где правая часть даст нам искомую силу.
Если же решают вторую основную задачу динамики точки и задан вектор силы, но требуется определить радиус-вектор как функцию (54) от времени, то для решения задачи нужно интегрировать уравнение (125).
Значительно проще решать такие задачи не в векторной, а в координатной форме.
Все основные теоремы динамики точки могут быть выведены из трех дифференциальных уравнений движения материальной точки в прямоугольных координатах: mx = X; mу = Y; mz =Z
Дифференциальные уравнения движения точки в прямоугольных координатах
Пусть движение точки M задано в прямоугольных координатах кинематическими уравнениями
x = x (t), y = y (t), z = z (t). (58)
Преобразуем выражение (123) основного закона динамики; для этого определим проекции на оси координат ускорения  и силы
и силы  . Направляющие косинусы (67) ускорения являются вместе с тем и направляющими косинусами силы, так как направление ускорения совпадает с направлением силы. Умножая величины (123) на
. Направляющие косинусы (67) ускорения являются вместе с тем и направляющими косинусами силы, так как направление ускорения совпадает с направлением силы. Умножая величины (123) на  , получим: max = F cos α.
, получим: max = F cos α.
Но согласно (65)  . Подставляем это значение и, пользуясь для проекции силы на ось абсцисс (и аналогично для проекций на оси у и z) знакомым нам по статике обозначением, получим
. Подставляем это значение и, пользуясь для проекции силы на ось абсцисс (и аналогично для проекций на оси у и z) знакомым нам по статике обозначением, получим
 (126)
(126)
или, если обозначать вторые производные по времени двумя точками,
mx = X; mу = Y; mz =Z (126 / )
Система трех дифференциальных уравнений (126) второго порядка эквивалентна системе шести дифференциальных уравнений первого порядка:
 (127)
(127)
Уравнения (126) или (127) называют дифференциальными уравнениями движения материальной точки в прямоугольных координатах.
Из уравнений движения мы выведем все теоремы динамики. Они дают возможность решить и обе основные задачи динамики точки. В прямой задаче, когда кинематические уравнения движения (58) даны, решение сводится к дифференцированию этих уравнений: умножив на массу вторую производную от координаты но времени, получим проекцию силы. В обратной задаче, когда заданы проекции силы X, Y и Z, а нужно определить координаты точки х, у и z как функции времени (58), решение сводится к интегрированию трех совместных дифференциальных уравнений, где независимым переменным является время.
Три совместных дифференциальных уравнения (126) второго порядка определяют координаты х, у и z в функции времени t. Если движущаяся точка M совершенно свободна, то приложенные к ней силы могут быть функциями ее координат х, у и z, проекций ее скорости х, у и z и времени t:
Проинтегрировать их в общем виде невозможно, но при некоторых видах функции F эти интегралы могут быть получены. В очень многих случаях вычисления возможно проводить на интегрирующих машинах.
При интегрировании дифференциальных уравнений движения материальной точки появляется шесть постоянных интеграции, которые при решении каждой задачи должны быть определены из начальных условий
Постоянные интегрирования
Общие интегралы дифференциальных уравнений движения материальной точки содержат шесть постоянных интеграции: C1, C2, C3, C4, C5, C6. Эти постоянные величины отнюдь не являются произвольными, и в каждой частной задаче, при решении которой приходится интегрировать дифференциальные уравнения движения, постоянные интеграции должны быть определены из начальных условий. Если заданы положение и скорость движущейся точки для какого-либо мгновения t=t0 (t0 может быть равным или не равным нулю), то нужно определить постоянные C1, C2, C3, C4, C5 и C6 таким образом, чтобы при t=t0 координаты х, у и z получили заданные значения х0, у0 и z0 и производные
х, у и z — заданные значения υ0x, υ0y, и υ0z.
Допускают, что данным начальным условиям соответствует только одно движение, конечно, при заданной массе m и силе F. В справедливости этого положения мы -убедимся на всех примерах, которые будем рассматривать, хотя это положение имеет и математическое доказательство. Поэтому, если мы нашли какое-либо движение точки M, удовлетворяющее уравнениям (126) и начальным данным, то, следовательно, мы определили именно то движение, которое искали.
Задача №1
Точка массы т кг движется по винтовой линии согласно кинематическим уравнениям движения: х=r cos kt, у =r sin kt, z=ut, где x, у, z и r выражены в метрах, а t — в секундах; известно, что r, k и и постоянны. Определить величину и направление силы в функции расстояния.
Решение. Задача заключается в определении силы по заданному движению, т. е. является прямой задачей динамики. Условие выражено в физической системе единиц (СИ). При решении будем выражать длину в метрах, мaccy- в килограммах и время — в секундах.
Определим по (126) проекции силы на координатные оси, для чего сначала дважды продифференцируем заданные текущие координаты точек:
х=rk 2 cos kt, у =rk 2 sin kt, z=0
Умножая на т полученные значения проекций ускорения, определим в ньютонах проекции силы:
X= — mk 2 x, Y = — mk 2 y, Z=0

Направляющие косинусы силы найдем по (6):

Ответ. Сила постоянна по величине и перпендикулярна к оси Oz.
Задача №2
Из орудия, стоящего на берегу на высоте 30 ,и над уровнем моря (рис. 160), выпущен снаряд массы m кг со скоростью 1000 м/сек под углом 30° к плоскости горизонта и под углом 60° к линии берега. Пренебрегая сопротивлением воздуха, определить точку, в которой упадет снаряд.
Решение. Единственной силой, действующей па снаряд во время полета, является его вес G = mg. Пo данной силе и по начальным данным (местоположение орудия и начальная скорость снаряда) надо определить движение снаряда и место его падения в морс. Задача относится к обратным задачам динамики. Для ее решения надо составить и проинтегрировать дифференциальные уравнения движения снаряда. Задачу будем решать в единицах СИ. Построим систему координат, взяв за начало точку О, находящуюся под орудием на уровне моря. Ось Ox направим горизонтально, перпендикулярно к берегу в сторону моря, ось Oy— вдоль берега, а ось Oz—вертикально вверх.
Для составления дифференциальных уравнений движения надо знать проекции действующей силы на оси координат. На снаряд после вылета его из орудия действовала только одна сила тяжести G = mg, направленная по вертикали вниз. Проекции действующей силы:
Дифференциальные уравнения движения снаряда напишем в виде (127):

Сокращаем на m, разделяем переменные:
откуда, интегрируя, находим:
Чтобы определить постоянные интеграции, подставим вместо t нуль, а вместо проекций скорости-их начальные значения υox, υoy, и υoz, соответствующие мгновению t = 0. Получим
Таким образом, три первые постоянные интеграции в нашей задаче равны проекциям начальной скорости снаряда. Чтобы определить числовые значения этих проекций, надо знать направляющие косинусы начальной скорости. Снаряд был выпущен под углом 30° к плоскости горизонта, следовательно, угол ур> 0 начальной скорости с вертикалью равен 60°. Угол βυ,0, по условию задачи, тоже равен 60 o , cos υ,0 определим из равенства единице Суммы квадратов направляющих косинусов:

Теперь нетрудно определить и проекции начальной скорости:

Мы получили числовые значения постоянных интеграции:

Подставляя эти значения постоянных в уравнения и выражая проекции скоростей по (63), получим три новых дифференциальных уравнения:

Разделив переменные и проинтегрировав, получим

Для определения C4, C5 и C6 подставим и в эти уравнения вместо t его частное значение 0, а вместо х, у и z —их частные значения x0, у0 и z0:
При выбранной нами системе координат имеем x0 =0; y0 = 0; z0 = + 30м, следовательно, C4 = 0; C5=0; C6=+30.
Подставляя эти значения в уравнения, полученные после второго интегрирования, найдем кинематические уравнения движения снаряда:

Чтобы определить положение точки, в которой снаряд упадет в море, надо знать продолжительность полета снаряда. Для этого приравняем нулю аппликату z, так как в мгновение, когда снаряд коснется моря, он будет находиться в плоскости хОу. Из уравнения
4,905t 2 — 500t-30 = 0
находим два значения: t=101,6 сек и t=—0,06 сек. Второе значение отбрасываем а первое подставляем в кинематические уравнения движения. Находим ответ.
Ответ. x = 71 831 м — 71,8 км; у = 50 800 м — 50,8 км; z = 0.
Из этого примера видно, что движение точки зависит не только от действующих сил, но и от начальных данных. Если бы начальная скорость или начальные координаты были иными, то и движение снаряда отличалось бы от полученного. Оно по-прежнему было бы равномерным но горизонтали и равнопеременным по вертикали; траекторией снаряда оставалась бы парабола, но она была бы иной и иначе расположенной; иной была бы и точка попадания. Полученные значения постоянных C1, C2, . C6 определены для данной задачи, и при этих значениях постоянных может быть только одно найденное нами решение. Эти постоянные величины вовсе не являются произвольными. Постоянные интеграции, являясь первоначальными значениями переменных, придают решению какой-либо задачи механики всю ту общность, какую она способна иметь.
Вариации постоянных интеграции. Пусть движение какой-либо точки M массы m происходит под действием силы  . Составив и проинтегрировав дифференциальные уравнения движения точки, определим постоянные интеграции C1, C2, . C6. Тогда, подставляя в полученные уравнения частные значения времени t, мы можем определить положение точки M во всякое данное мгновение. Пусть, например, в мгновение t1 координаты точки M равны x1, y1, z1. Если мы дадим постоянным интеграции бесконечно малые приращения δC1, δC2, . произвольного знака и произвольной величины, называемые вариациями, то положение точки M в то же мгновение t1, но при измененных постоянных интеграции C1 + δC1, C2 + δC2, . будет иным. Точка M при неизменившемся времени получит бесконечно малое отклонение, координаты ее получат некоторые бесконечно малые приращения δx1, δy1, δz1, называемые вариациями координат точки, при движении, определяемом величинами C1, C2, . постоянных интеграции.
. Составив и проинтегрировав дифференциальные уравнения движения точки, определим постоянные интеграции C1, C2, . C6. Тогда, подставляя в полученные уравнения частные значения времени t, мы можем определить положение точки M во всякое данное мгновение. Пусть, например, в мгновение t1 координаты точки M равны x1, y1, z1. Если мы дадим постоянным интеграции бесконечно малые приращения δC1, δC2, . произвольного знака и произвольной величины, называемые вариациями, то положение точки M в то же мгновение t1, но при измененных постоянных интеграции C1 + δC1, C2 + δC2, . будет иным. Точка M при неизменившемся времени получит бесконечно малое отклонение, координаты ее получат некоторые бесконечно малые приращения δx1, δy1, δz1, называемые вариациями координат точки, при движении, определяемом величинами C1, C2, . постоянных интеграции.
Задача №3
Движение точки весом 2 Г выражается уравнениями x= 3cos2πt см; y=4sinπt см, где t выражено в секундах. Определить проекции силы, действующей на точку, в зависимости от ее координат.
Решение. Задача относится к прямым задачам динамики: по данному движению точки надо определить действующую силу. Для ее решения продифференцируем дважды кинематические уравнения движения точки и, умножив на m найденные х и у, получим X и Y.
Условие дано в технической системе единиц, и в этой задаче примем L в см, F в Г и T сек. Кинематические уравнения движения известны. Дифференцируя дважды, находим
х — 4π 2 3 cos 2πt = — 4π 2 x;
у = —4π 2 sin πt = — π 2 у.
Умножая массу  на проекции ускорения, найдем проекции силы в граммах. Чтсбы перевести их в ньютоны, надо умножить число граммов на 0,00981.
на проекции ускорения, найдем проекции силы в граммах. Чтсбы перевести их в ньютоны, надо умножить число граммов на 0,00981.
Решим теперь эту же задачу в физической системе единиц. Принимать за основные единицы метр, килограмм и секунду в этой задаче нецелесообразно. Выразим L в см, M в г и T в сек.
В условии задачи дан вес точки G = 2 Г. Следовательно, ее масса m = 2 г. Умножая проекции ускорения на массу, выраженную в граммах, получим проекции силы в динах:
X = — 8π 2 x = — 78,88x [дин];
Y = — 2π 2 y = — 19,72y [дин].
Чтобы выразить их в ньютонах, надо число дин поделить на 100000.
Ответ. X =— 0,08χ Г = —78,88x дин = —0.0007888x н;
Y = —0,02x Г =— 19,72y дин = —0,0001972y н.
Обратим внимание на одно обстоятельство, которое легко усмотреть в только что решенной задаче. Определяя силу по заданному движению материальной точки, мы нашли, что движение произведено силой, являющейся функцией координат точки. Но мы могли бы выразить силу и как функцию времени. В самом деле, продифференцировав дважды кинематические уравнения движения и умножив вторые производные на m, найдем
X = — 12rnπ 2 cos 2πt; Y = —4rnπ 2 sin πt.
Так одно и то же движение может совершаться под действием различно выраженной силы.
Из этого же примера видно, что если точка движется в одной плоскости, то, приняв эту плоскость за плоскость хОу, можно описать движение точки системой первых двух дифференциальных уравнений движения (126′); третье же дифференциальное уравнение становится лишним.
Задача №4
Найти плоскую траекторию точки M массы m, притягиваемой к неподвижному центру О с силой, пропорциональной расстоянию r и равной k 2 mr, при следующих начальных данных:
Решение. Задача относится к обратным задачам динамики: по заданной силе определить движение. Точка M описывает плоскую траекторию, и нам понадобятся только два уравнения движения.
Если в какое-либо мгновение t точка M имела координаты х и у и находилась от центра на расстоянии  (рис. 161), то проекции силы на оси координат:
(рис. 161), то проекции силы на оси координат:


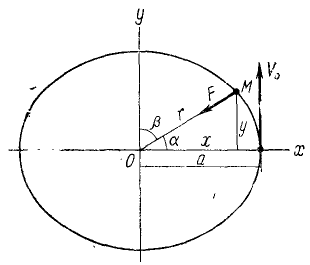
Рис. 161
Дифференциальными уравнениями движения точки являются:

Сократим на т и умножим первое из уравнений на υxdt=dx, а второе—на υydt = dy:

Интегрируем и умножаем на 2:

Для определения постоянных интеграции C1 и C2 подставляем в эти уравнения вместо переменных величин их начальные значения:

Значения постоянных вносим в уравнения, одновременно выражая υx и υy по (63):

Извлекаем квадратные корни, разделяем переменные н интегрируем: 
Для определения постоянных интеграции C3 и C4 подставляем в эти уравнения вместо переменных величин t, х и у их начальные значения:
Эти значения постоянных интеграции вносим в уравнения:


Мы получили кинематические уравнения движения (58) точки в декартовых координатах. Чтобы определить траекторию, надо из них исключить время. Возводя в квадрат и складывая, получаем уравнение траектории
Ответ. Эллипс с полуосями a и  .
.
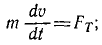
В еще более частном случае, когда сила имеет постоянное направление, а начальная скорость направлена по силе или равна нулю, движение точки прямолинейно. Направив ось Ox по этой траектории, мы обойдемся первым из уравнений (126), которое и нужно интегрировать, чтобы получить закон (58 , ) искомого движения точки. При этом нельзя забывать, что под X мы понимаем не силу, а ее проекцию F cos a, которая в данном случае по величине равна модулю силы. Если α = 0, то сила направлена в сторону положительной оси Ох, и тогда Х>0. Если же α = π, то сила направлена в сторону отрицательного направления оси Ох, тогда X 2 υ 2 .
Решение. Предположим, что тело начинает падать из начального положения О, и направим вниз из точки О ось Ох. Так как движение прямолинейное, то для его определения достаточно первого уравнения (126). На падающее тело действуют две силы: 1) постоянная сила G = mg, направленная в положительную сторону оси Ох, и 2) переменная сила R = mgk 2 υ 2 , являющаяся функцией скорости; она возрастает пропорционально квадрату скорости и направлена против скорости, а следовательно, против положительного направления оси Ох. Имеем

Перепишем это уравнение, сократив его на m:
Из этого уравнения видно, что падение не может быть равноускоренным, что по мере возрастания скорости сила сопротивления увеличивается, правая часть уравнения уменьшается и ускорение стремится к нулю.
Чтобы взять интеграл, перемножим соответственно левые и правые части этого уравнения и следующего выражения:




Это уравнение позволяет определить скорость падающего тела во всякое данное мгновение t. Оно уточняет известную формулу υ=gt, так как здесь учтено и сопротивление воздуха.
Ответ. 
Движение точки можно описать в проекциях на оси естественного трехгранника двумя уравнениями:
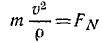
Дифференциальные уравнения движения материальной точки в форме Эйлера. В кинематике мы изучали три способа определения движения точки: 1) векторный, 2) в прямоугольных координатах, 3) естественный. Соответственно и в динамике мы можем определить движение точки по заданным силам (или силы по заданному движению) векторным уравнением (125), в проекциях на прямоугольные оси — уравнениями (126), а также естественными уравнениями движения. Из многих форм уравнений движения эти три применяют наиболее часто.
Проецируя ускорение на оси естественного трехгранника, мы нашли (см. § 23), что проекции ускорения на касательную аN, на главную нормаль αv и на бинормаль ab выражаются следующими формулами:

и вместо трех составляющих полное ускорение имеет только две. Но сила всегда направлена по ускорению точки, а следовательно, проецируя силу на оси естественного трехгранника, мы и здесь получим только две составляющие (FT — на касательную и FN— на главную нормаль) и определим движение точки только двумя уравнениями:
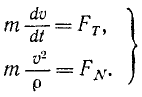 (128)
(128)
Задача №6
Горнолыжник в конце склона развил скорость 54 км/ч, после чего свободно скользил по горизонтальному прямолинейному участку пути. Определить длину и время свободного скольжения, если коэффициент трения лыж по снегу f’ = 0,051.
Решение. В задаче примем единицы СИ; тогда вес лыжника, выраженный в ньютонах, G = 9,81 ∙m, где m — его .масса в кг. Задача является обратной задачей динамики, так как требуется определить движение по заданной силе Fгp— f’G. Достаточно одного первого из уравнений (128), потому что движение прямолинейное. Проекция силы имеет отрицательный знак, так как сила трения направлена против скорости, а скорость направлена в положительном направлении (в сторону возрастания расстояния): .
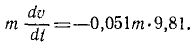
Сокращаем на m и разделяем переменные:


Чтобы определить постоянную C1, подставим вместо t нуль, а вместо υ—начальное значение скорости — = 15 м/сек:
= 15 м/сек:
Подставляя это значение C1 в уравнение, полученное после интегрирования, и заменяя υ по (53), получим новое дифференциальное уравнение:
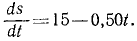
Разделим переменные и проинтегрируем:
В начальное мгновение лыжник не прошел еще никакого расстояния по горизонтальному участку, а потому C2 = 0. Время скольжения до остановки определим, положив в уравнении, полученном для скорости, 
15 — 0,50t=0, откуда t = 30.
Подставляя это значение t в последнее уравнение, найдем длину свободного скольжения.
Ответ. Время скольжения 30 сек, длина 225 м.
Задача №7
Маятник Борда для определения ускорения свободно падающих тел представляет собой латунный шарик массой 200 г, подвешенный на очень тонкой проволоке длиной 100 см. При качании шарик в наинизшем положении имеет скорость 8 см/сек. Определить натяжение проволоки в ее нижнем конце при наинизшем положении маятника.
Решение. В задаче применена физическая система единиц. Примем L в см, M в г, T в сек.
Задача относится к прямым задачам динамики. Чтобы по данному движению латунного шарика, принимаемого за материальную точку, определить действующую силу, напишем второе из естественных уравнений движения материальной точки (128). В наинизшем положении на шарик действует сила натяжения проволоки, проекцию которой T будем считать положительной, так как она направлена внутрь траектории, и сила тяжести G = 200 . 981 дин, проекцию которой будем считать отрицательной:
или, подставляя числовые значения,
откуда получаем ответ.
Ответ. T = 196 328 дин = 1,96328 н.
Движение точки в плоскости можно описать двумя уравнениями в полярных координатах.
Уравнения движения точки в полярных координатах
В ряде задач бывает удобно исследовать движение точки в полярных координатах. Примем без доказательства, что проекция ускорения точки на полярный радиус-вектор равна (r — rφ 2 ), а на перпендикулярное направление равна (rφ + 2rφ). Помножив на массу эти проекции ускорения точки и приравняв проекциям силы, напишем дифференциальные уравнения движения точки в полярных координатах:
 (129)
(129)

где mk—масса k-й точки, xk, yk и zk-проекции ее ускорения, a Xk, Yk и Zk—проекции равнодействующей всех сил, приложенных к этой точке (k = 1, 2, 3, . n).
Далеко не всегда действующие силы бывают известны. Обычно остаются неизвестными внутренние силы. Для вывода некоторых общих теорем динамики и при решении некоторых частных задач бывает удобным выделить внутренние силы уже при написании дифференциальных уравнений движения.
Рассмотрим сначала одну из материальных точек системы, например точку с индексом 1 <k= 1), и распределим все силы, приложенные к этой точке, на две группы: внешние и внутренние. Сложив все внешние силы, действующие на эту точку, получим их равнодействующую  , а сложив все внутренние, получим равнодействующую внутренних сил
, а сложив все внутренние, получим равнодействующую внутренних сил  . Проекции этих сил обозначим
. Проекции этих сил обозначим  ,
, ,
,  и
и  ,
, ,
,  .
.
Аналогично поступим с силами, приложенными к остальным точкам, и заменим в написанных выше уравнениях проекции равнодействующей Xk суммой  , то же сделаем по двум другим осям. Тогда дифференциальные уравнения примут вид:
, то же сделаем по двум другим осям. Тогда дифференциальные уравнения примут вид:
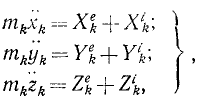 (130)
(130)
Следовательно, движение свободной механической системы, состоящей из n материальных точек, определяется системой 3n дифференциальных уравнений второго порядка.
Если система не свободна, а на нее наложены связи, выражающие некоторую зависимость между координатами точек механической системы, то бывает возможным сократить число дифференциальных уравнений движения, о чем будет подробнее сказано в § 52 и § 53.
В ряде случаев оказывается целесообразным разделить все силы, действующие на материальные точки механической системы на две категории по иному признаку, а именно на активные силы и реакции связей. Как уже было сказано, реакции связей часто зависят от движения системы и не могут быть найдены, пока не определено движение системы. Обозначая проекции равнодействующей всех активных сил, действующих на k-ю точку,  ,
,  и
и  , а проекции равнодействующей всех реакций связей, приложенных к k-й точке,
, а проекции равнодействующей всех реакций связей, приложенных к k-й точке,  ,
,  и
и  , получим:
, получим:
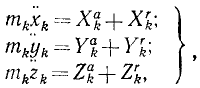 (130′)
(130′)
Во всем вашем курсе (если это специально не оговорено) рассмотрены только свободные механические системы и механические системы с идеальными связями. Понятие идеальных связей нам уже встречалось в статике (см. § 4) и будет уточнено в динамике (см. § 51).
В дальнейшем из дифференциальных уравнений (130) и (130′) мы выведем общие теоремы динамики таких материальных систем.
Решение многих проблем по динамике механических систем сопряжено с большими трудностями математического характера. Интегрирующие машины в очень многих случаях дают возможность преодолеть эти трудности.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Прямолинейное движение точки
- Криволинейное движение материальной точки
- Движение несвободной материальной точки
- Относительное движение материальной точки
- Сложение движение твердого тела
- Кинематика сплошной среды
- Аксиомы классической механики
- Дифференциальные уравнения движения материальной точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Telegram и логотип telegram являются товарными знаками корпорации Telegram FZ-LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Видео:13. Как решить дифференциальное уравнение первого порядка?Скачать
iSopromat.ru

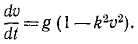
Для интегрирования дифференциальных уравнений движения материальной точки необходимо знать значение координат и скорости точки в какой-либо момент времени (обычно в начальный), поэтому эти значения называют начальными условиями.
Из теории дифференциальных уравнений известно, что при интегрировании уравнения второго порядка появляются две произвольных постоянных интегрирования.
Следовательно, при интегрировании системы (4) появятся шесть постоянных интегрирования. Таким образом, решение системы (4) будет иметь вид
В зависимости от постоянных интегрирования получается целый класс решений, удовлетворяющих системе уравнений (4).
Чтобы получить конкретное решение, необходимо определить постоянные интегрирования.
Для этого необходимо знать значение координат и скорости точки в какой-либо момент времени (обычно в начальный), поэтому эти значения называют начальными условиями.
Таким образом, решение (6) можно переписать в виде
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Видео:9. Метод вариации произвольной постоянной ( метод Лагранжа ). Линейные дифференциальные уравнения.Скачать

Дифференциальные уравнения движения точки
С помощью дифференциальных уравнений движения решается вторая задача динамики. Правила составления таких уравнений зависят от того, каким способом хотим определить движение точки.
1) Определение движения точки координатным способом.
Рассмотрим свободную материальную точку, движущуюся под действием сил  . Проведем неподвижные координатные оси Oxyz (рис.20). Проектируя обе части равенства
. Проведем неподвижные координатные оси Oxyz (рис.20). Проектируя обе части равенства  на эти оси и учитывая, что
на эти оси и учитывая, что  и т.д., получим дифференциальные уравнения криволинейного движения точки в проекциях на оси прямоугольной декартовой системы координат:
и т.д., получим дифференциальные уравнения криволинейного движения точки в проекциях на оси прямоугольной декартовой системы координат:

Рис.20
Так как действующие на точку силы могут зависеть от времени, от положения точки и от ее скорости, то правые части уравнений могут содержать время t, координаты точки х, у, z и проекции ее скорости  . При этом в правую часть каждого из уравнений могут входить все эти переменные.
. При этом в правую часть каждого из уравнений могут входить все эти переменные.
Чтобы с помощью этих уравнений решить основную задачу динамики, надо, кроме действующих сил, знать еще начальные условия, т.е. положение и скорость точки в начальный момент. В координатных осях Oxyz начальные условия задаются в виде: при t=0

Зная действующие силы, после интегрирования уравнений найдем координаты х, y, z движущейся точки, как функции времени t, т.е. найдем закон движения точки.
Пример 17. Найти закон движения материальной точки массы m, движущейся вдоль оси х под действием постоянной по модулю силы F (рис. 20.1) при начальных условиях:  при t=0.
при t=0.
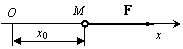
Рис.20.1
Решение. Составим дифференциальное уравнение движения точки в проекции на ось х:  . Интегрируя это уравнение, находим:
. Интегрируя это уравнение, находим:  . Постоянная C1 определяется из начального условия для скорости и равна
. Постоянная C1 определяется из начального условия для скорости и равна  . Окончательно
. Окончательно

Далее, учитывая, что v = dx/dt, приходим к дифференциальному уравнению:  , интегрируя которое получаем
, интегрируя которое получаем
Постоянную C2 определяем из начального условия для координаты точки. Она равна  . Следовательно, закон движения точки имеет вид
. Следовательно, закон движения точки имеет вид
Пример 18. Груз веса Р (рис.20.2) начинает двигаться из состояния покоя вдоль гладкой горизонтальной плоскости под действием силы F = kt. Найти закон движения груза.
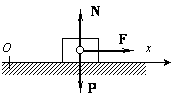
Рис.20.2
Решение. Выберем начало отсчета системы координат О в начальном положении груза и направим ось х в сторону движения (рис. 20.2). Тогда начальные условия имеют вид: x(t = 0) = 0, v(t = 0) = 0. На груз действуют силы F, P и сила реакции плоскости N. Проекции этих сил на ось х имеют значения Fx = F = kt, Рx = 0, Nx = 0, поэтому соответствующее уравнение движения можно записать так:  . Разделяя переменные в этом дифференциальном уравнении и затем интегрируя, получим: v = gkt 2 /2P + C1. Подставляя начальные данные (v(0) = 0), находим, что C1 = 0, и получаем закон изменения скорости
. Разделяя переменные в этом дифференциальном уравнении и затем интегрируя, получим: v = gkt 2 /2P + C1. Подставляя начальные данные (v(0) = 0), находим, что C1 = 0, и получаем закон изменения скорости  .
.
Последнее выражение, в свою очередь, является дифференциальным уравнением, интегрируя которое найдем закон движения материальной точки:  . Входящую сюда постоянную определяем из второго начального условия х(0) = 0. Легко убедиться, что C2=0. Окончательно
. Входящую сюда постоянную определяем из второго начального условия х(0) = 0. Легко убедиться, что C2=0. Окончательно

Пример 19. На груз, находящийся в покое на горизонтальной гладкой плоскости (см. рис. 20.2) на расстоянии a от начала координат, начинает действовать в положительном направлении оси x сила F = k 2 (P/g)x, где Р – вес груза. Найти закон движения груза.
Решение. Уравнение движения рассматриваемого груза (материальной точки) в проекции на ось х

Начальные условия уравнения (1) имеют вид: x(t = 0) = a, v(t = 0) = 0.
Входящую в уравнение (1) производную по времени от скорости представим так
Подставляя это выражение в уравнение (1) и сокращая на (P/g), получим

Разделяя переменные в последнем уравнении, находим, что  . Интегрируя последнее, имеем:
. Интегрируя последнее, имеем:  . Используя начальные условия
. Используя начальные условия  , получаем
, получаем  , и, следовательно,
, и, следовательно,

Поскольку сила действует на груз в положительном направлении оси х, то ясно, что в том же направлении он должен и двигаться. Поэтому в решении (2) следует выбрать знак «плюс». Заменяя дальше во втором выражении (2) v на dx/dt, получаем дифференциальное уравнение для определения закона движения груза. Откуда, разделяя переменные, имеем
Интегрируя последнее, находим: arch x/a=kt+C2. После нахождения постоянной C2 окончательно получаем
arch x/a=kt или  .
.
Пример 20. Шар M массы m (рис.20.3) падает без начальной скорости под действием силы тяжести. При падении шар испытывает сопротивление  , где
, где  – постоянный коэффициент сопротивления. Найти закон движения шара.
– постоянный коэффициент сопротивления. Найти закон движения шара.
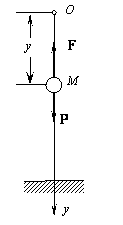
Рис.20.3
Решение. Введем систему координат с началом в точке местоположения шара при t = 0, направив ось у вертикально вниз (рис. 20.3). Дифференциальное уравнение движения шара в проекции на ось у имеет тогда вид
 . (1)
. (1)
Начальные условия для шара записываются так: y(t = 0) = 0, v(t = 0) = 0.
Разделяя переменные в уравнении (1)
и интегрируя, находим:  , где
, где  . Или после нахождения постоянной
. Или после нахождения постоянной

Отсюда следует, что предельная скорость, т.е. скорость при  , равна
, равна  .
.
Чтобы найти закон движения, заменим в уравнении (2) v на dy/dt. Тогда, интегрируя полученное уравнение с учетом начального условия, окончательно находим
Пример 21. Изучим движение тела, брошенного с начальной скоростью v0 под углом  к горизонту, рассматривая его как материальную точку массы т (рис.21). При этом сопротивлением воздуха пренебрежём, а поле тяжести будем считать однородным (Р=const), полагая, что дальность полёта и высота траектории малы по сравнению с радиусом Земли.
к горизонту, рассматривая его как материальную точку массы т (рис.21). При этом сопротивлением воздуха пренебрежём, а поле тяжести будем считать однородным (Р=const), полагая, что дальность полёта и высота траектории малы по сравнению с радиусом Земли.
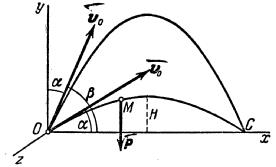
Рис.21
Поместим начало координат О в начальном положении точки. Направим ось Oy вертикально вверх; горизонтальную ось Ox расположим в плоскости, проходящей через Оy и вектор v0, а ось Oz проведём перпендикулярно первым двум осям (рис.21). Тогда угол между вектором v0 и осью Ox будет равен .
Изобразим движущуюся точку М где-нибудь на траектории. На точку действует одна только сила тяжести  , проекции которой на оси координат равны: Px=0, Py=-P=-mg, Pz=0.
, проекции которой на оси координат равны: Px=0, Py=-P=-mg, Pz=0.
Подставляя эти величины в дифференциальные уравнения и замечая, что  /dt =
/dt =  и т.д. мы после сокращения на m получим:
и т.д. мы после сокращения на m получим:

Умножая обе части этих уравнений на dt и интегрируя, находим:
Начальные условия в нашей задаче имеют вид:



Удовлетворяя начальным условиям, будем иметь:

Подставляя эти значения С1, С2 и С3 в найденное выше решение и заменяя vx, vy, vz на  придём к уравнениям:
придём к уравнениям:

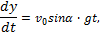

Интегрируя эти уравнения, получим:

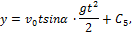

Подстановка начальных данных даёт С4=С5=С6=0, и мы окончательно находим уравнения движения точки М в виде:

Из последнего уравнения следует, что движение происходит в плоскости Оxy.
Имея уравнение движения точки, можно методами кинематики определить все характеристики данного движения.
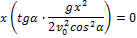
1. Траектория точки. Исключая из первых двух уравнений (1) время t, получим уравнение траектории точки:

Это — уравнение параболы с осью, параллельной оси Оy. Таким образом, брошенная под углом к горизонту тяжёлая точка движется в безвоздушном пространстве по параболе (Галилей).
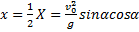
2. Горизонтальная дальность. Определим горизонтальную дальность, т.е. измеренное вдоль оси Оx расстояние ОС=Х. Полагая в равенстве (2) y=0, найдём точки пересечения траектории с осью Ох. Из уравнения:
получаем 
Первое решение дает точку О, второе точку С. Следовательно, Х=Х2 и окончательно

Из формулы (3) видно, что такая же горизонтальная дальность X будет получена при угле  , для которого
, для которого  , т.е. если угол
, т.е. если угол  . Следовательно, при данной начальной скорости
. Следовательно, при данной начальной скорости  в одну и ту же точку С можно попасть двумя траекториями: настильной (
в одну и ту же точку С можно попасть двумя траекториями: настильной (  ) и навесной (
) и навесной (  ).
).
При заданной начальной скорости V0 наибольшая горизонтальная дальность в безвоздушном пространстве получается, когда  , т.е. при угле
, т.е. при угле  .
.
3. Высота траектории. Если положить в уравнении (2)
 , то найдется высота траектории Н:
, то найдется высота траектории Н:
 . (4)
. (4)
4. Время полета. Из первого уравнения системы (1) следует, что полное время полета Т определяется равенством  . Заменяя здесь Х его значением, получим
. Заменяя здесь Х его значением, получим

При угле наибольшей дальности все найденные величины равны:

Полученные результаты практически вполне приложимы для ориентировочного определения характеристик полета снарядов (ракет), имеющих дальности порядка 200…600 км, так как при этих дальностях (и при  ) снаряд основную часть своего пути проходит в стратосфере, где сопротивлением воздуха можно пренебречь. При меньших дальностях на результат будет сильно влиять сопротивление воздуха, а при дальностях свыше 600 км силу тяжести уже нельзя считать постоянной.
) снаряд основную часть своего пути проходит в стратосфере, где сопротивлением воздуха можно пренебречь. При меньших дальностях на результат будет сильно влиять сопротивление воздуха, а при дальностях свыше 600 км силу тяжести уже нельзя считать постоянной.
Пример 22. Из пушки, установленной на высоте h, произвели выстрел под углом к горизонту (рис. 22). Ядро вылетело из ствола орудия со скоростью u. Определим уравнения движения ядра.
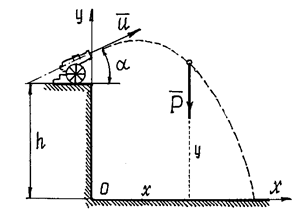
Рис.22
Чтобы правильно составить дифференциальные уравнения движения, надо решать подобные задачи по определённой схеме.
а) Назначить систему координат (количество осей, их направление и начало координат). Удачно выбранные оси упрощают решение.
б) Показать точку в промежуточном положении. При этом надо проследить за тем, чтобы координаты такого положения обязательно были положительными (рис.22).
в) Показать силы, действующие на точку в этом промежуточном положении (силы инерции не показывать!).
В этом примере – это только сила , вес ядра. Сопротивление воздуха учитывать не будем.
г) Составить дифференциальные уравнения по формулам:  . Отсюда получим два уравнения:
. Отсюда получим два уравнения:  и
и  .
.
д) Решить дифференциальные уравнения.
Полученные здесь уравнения – линейные уравнения второго порядка, в правой части – постоянные. Решение этих уравнений элементарно.

Осталось найти постоянные интегрирования. Подставляем начальные условия (при t = 0 x = 0, y = h,  ) в эти четыре уравнения:
) в эти четыре уравнения:  .
.
Подставляем в уравнения значения постоянных и записываем уравнения движения точки в окончательном виде
Имея эти уравнения, как известно из раздела кинематики, можно определить и траекторию движения ядра, и скорость, и ускорение, и положение ядра в любой момент времени.
Как видно из этого примера, схема решения задач довольно проста. Сложности могут возникнуть только при решении дифференциальных уравнений, которые могут оказаться непростыми.
🎥 Видео
Дифференциальные уравнения, 1 урок, Дифференциальные уравнения. Основные понятияСкачать

Откуда появляются дифференциальные уравнения и как их решатьСкачать

Щитовидная железа в ЕГЭ по биологии | TutorOnlineСкачать

Решение дифференциальных уравнений. Практическая часть. 11 класс.Скачать

5 Численное решение дифференциальных уравнений Part 1Скачать

Математика без Ху!ни. Линейное неоднородное уравнение 1 порядка. Метод вариации постоянной.Скачать

Динамика. Введение, дифференциальные уравнения движения точки, прямая и обратная задачи динамики.Скачать

Теоретическая механика. Задание Д1 (часть 1) из сборника ЯблонскогоСкачать

Линейное неоднородное дифференциальное уравнение второго порядка с постоянными коэффициентамиСкачать

Видеоурок "Системы дифференциальных уравнений"Скачать

Дифференциальные уравнения движенияСкачать
