Об автоматическом дифференцировании (АД) на Хабре уже писалось здесь и здесь. В данной статье предлагается реализация АД для Delphi (протестировано в Embarcadero XE2, XE6) вместе с удобными классами методов Ньютона для решения нелинейных уравнений f(x) = 0 и систем F(X) = 0. Любые ссылки на готовые аналогичные библиотеки приветствуются, сам же я подобного не нашел, не считая отличного решателя СЛАУ с разреженной матрицей (см. под катом).
Давайте в самом начале отметим для себя, что выбор Delphi обусловлен legacy-кодом, тем не менее на C++ задачу можно решать следующим образом. Во-первых, для методов Ньютоновского (базовый метод Ньютона, метод Бройдена) типа имеются Numerical Recipes in C++. Ранее «Рецепты» были только на чистом C и приходилось делать свои классовые обертки. Во-вторых, можно взять одну из АД-библиотек из списка Autodiff.org. По моему опыту использования CPPAD быстрее FADBAD и Trilinos::Sacado примерно на 30%, самая же быстрая, судя по описанию, библиотека это новая ADEPT. В-третьих, для матрично-векторных операций можно взять проверенный временем uBlas , либо новые и быстрые конкуренты Armadillo и blaze-lib — это если для решения СЛАУ использовать отдельные библиотеки (например, SuiteSparce или Pardiso для прямых и ITL для итерационных методов). Привлекательным является также использование интегрированных библиотек линейной алгебры и решателей СЛАУ Eigen, MTL, PETSc (имеются также Ньютоновские решатели на C). Вся триада из заголовка полностью реализована, насколько мне известно, только в Trilinos.
- О применении численного дифференцирования
- Реализация АД
- Пример 1
- Реализация АД для разреженных матриц
- Пример 2
- Курсовая работа: Программа для решения дифференциальных уравнений первого порядка методом Рунге-Кутта
- Метод Рунге-Кутта решения дифференциальных уравнений и их систем
- Метод Рунге-Кутта решения дифференциальных уравнений и их систем
- 💥 Видео
Видео:5 Численное решение дифференциальных уравнений Part 1Скачать

О применении численного дифференцирования
Производные можно вычислять аналитически и численно. К аналитическим методам относятся ручное дифференцирование, символьное (Maple, Wolfram и т.п.) и непосредственно автоматическое дифференцирование, выраженное в средствах выбранного языка программирования.
Современный тренд на использование АД оправдан одной простой причиной — с помощью этой техники устраняется избыточность кода и его дублирование. Другой аргумент состоит в том, что, например, при решении нелинейных дифференциальных уравнений (систем) сеточными методами способ вычисления F(X) сам по себе является нетривиальной задачей. В реальных задачах невязка F(X) представлена суперпозицией вызовов функций с разных слоев программы и ручное дифференцирование теряет свою наглядность. Следует также отметить, что при моделировании нестационарных процессов F(X) меняется на каждом шаге по времени, также может меняться и сам вектор неизвестных X. Использование АД позволяет нам сконцентрироваться непосредственно на формировании F(X), однако не снимает вопрос о верификации получаемой матрицы Якобиана dF(X)/dX. Дело в том, что при вычислении невязок мы можем забыть изменить тип промежуточной переменной со стандартного double на тип АД (а многие библиотеки имеют неявное приведение типа АД к double), тем самым некоторые производные будут вычислены некорректно. Проблема в этом случае состоит в том, что даже при наличии ошибок в формулах для производных метод Ньютона может сходиться, хоть и за возросшее число итераций. Это может быть незаметно при одних начальных данных и приводить к расходимости процесса при других.
Таким образом, какой бы аналитической способ дифференцирования df/dx не был выбран, его крайне желательно дополнить сравнением с численным дифференцированием (f(x + h) — f(x)) / h, иначе всегда будут оставаться сомнения в правильности кода. Естественно, численные производные никогда не совпадут с точностью с правильными аналитическими, тем не менее можно порекомендовать следующий прием юнит-тестирования. Можно выгрузить в текстовые файлы вектора X, F(X) и матрицу dF(X)/dX и выложить на SVN. Затем получить dF(X)/dX численно и сохранить файл поверх существующего, после чего визуально сравнивать файлы между собой. Здесь Вы всегда увидите насколько поменялись значения и сможете локализовать координаты элементов матрицы с большими отклонениями (не в долях) — в этом месте находится ошибка аналитического дифференцирования.
Видео:Урок №1: Условия в Delphi - оператор "If Then" на примере программы "Решение квадратного уравнения"Скачать

Реализация АД
В Embarcadero Delphi до версии XE5 отсутствует возможность перегрузки арифметических операций для классов, но есть такая возможность для структур record (ссылка):
Обычно в АД на C++ размерность вектора производных является переменной величиной и инициализируется в конструкторе. В Delphi нельзя (есть попытки обойти) перегрузить оператор присваивания для структур и в связи с побитовым копированием вектор производных приходится делать фиксированной длины. Соответствующая константа TAutoDiff.n_all должна изначально задаваться вручную.
Пример 1
На данный момент в библиотеке перегружены почти все бинарные и унарные операторы, за исключением тригонометрических функций и булевых операций сдвига. Недостающие функции легко доработать самостоятельно.
Видео:5 Численное решение дифференциальных уравнений Part 1Скачать

Реализация АД для разреженных матриц
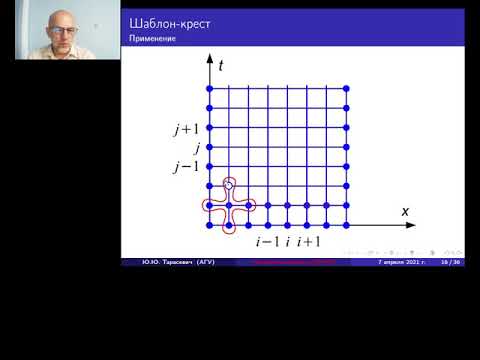
С одной стороны фиксированное значение n_all это существенное ограничение, ведь размерность вектора может поступать извне. С другой стороны для некоторых задач его можно ослабить. Дело в том, что если говорить о численных методах решения уравнений механики сплошных сред, то возникающие в них матрицы имеют разреженную структуру — классический пример это «схема крест» для оператора Лапласа, когда в уравнении для узла с координатами (i, j) (ограничимся 2D) задействованы только 5 узлов: (i, j), (i-1, j), (i+1, j), (i, j-1), (i, j+1). Обобщая идею мы должны заложить следующее для данной конкретной задачи:
Пусть общее число узлов в решаемой задаче N. Тогда в матрице Якобиана N_all = N * n_junc_vars столбцов, из них ненулевых только n_all. Если завести теперь внутри структуры TAutoDiff целочисленный вектор n_juncs, каждый элемент которого определяет глобальный индекс узла от 0 до N-1, то функцию dx с локальным индексом из диапазона [0, n_all-1] можно дополнить функцией dx_global с уже глобальным индексом из диапазона [0, N_all-1]. Пример 2 иллюстрирует детали использования такого интерфейса, плюсы которого будут наиболее полно видны при реализации метода Ньютона ниже.
Пример 2
В следующей части планируется рассмотрение класса методов Ньютоновского типа, а также вопроса выбора разреженного решателя СЛАУ. Пока же предлагаю читателям:
- попробовать написать АД на C++11 с использованием семантики перемещений: 1) это должно работать очень быстро; 2) можно будет обойтись перегрузкой операторов без expression templates; 3) это будет впервые.
- идею для курсовой по реализации АД на Roslyn CTP: можно работать сразу с синтаксическим деревом, которое содержит всю информацию об арифметических выражениях в F(X).
Видео:Численное решение системы дифференциальных уравнений(задачи Коши)Скачать

Курсовая работа: Программа для решения дифференциальных уравнений первого порядка методом Рунге-Кутта
| Название: Программа для решения дифференциальных уравнений первого порядка методом Рунге-Кутта Раздел: Рефераты по информатике, программированию Тип: курсовая работа Добавлен 21:04:57 05 апреля 2011 Похожие работы Просмотров: 3135 Комментариев: 20 Оценило: 4 человек Средний балл: 5 Оценка: неизвестно Скачать |






 |
1. Решение дифференциальных уравнений
Пусть дано дифференциальное уравнение первого порядка:
и начальное условие его решения:
Тогда решить уравнение — это значит найти такую функцию у — φ(х), которая, будучи подставленной, в исходное уравнение, обратит его в тождество и одновременно будет удовлетворено начальное условие. Задача отыскания функции у = φ (х) называется в математике задачей Коши. При решении дифференциального уравнения порядка nзадача Коши формулируется следующим образом.
Дано дифференциальное уравнение порядка n:
у ( n ) = f(x, y, у’ ’ ,…,y n -1 )
Необходимо найти такую функцию у = φ (х), которая, будучи подставленной в исходное уравнение, обратит его в тождество и одновременно будут удовлетворены следующие п начальных условий:
4.1 Метод Рунге-Кутта
Метод Рунге-Кутта обладает более высокой точностью, чем методы Эйлера за счет снижения методических ошибок. Идея метода состоит в следующем.
По методу Эйлера решение дифференциального уравнения первого порядка определяется из соотношения:
Тогда приращение Δ yi , может быть найдено путем интегрирования:
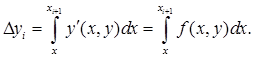
Вычислим теперь интеграл по методу прямоугольников:
Из полученного выражения видно, что вычисление интеграла по методу прямоугольников приводит к формуле Эйлера.
Вычислим интеграл по формуле трапеций:
Из выражения видно, что оно совпадает с расчетной формулой усовершенствованного метода Эйлера-Коши. Для получения более точного решения дифференциального уравнения следует воспользоваться более точными методами вычисления интеграла. В методе Рунге-Кутта искомый интеграл представляется в виде следующей конечной суммы:

где Pi— некоторые числа, зависящие от q; Ki (h) — функции, зависящие от вида подынтегральной функции f(x,y) и шага интегрирования h, вычисляемые по следующим формулам:
Значения p, α, β получают из соображений высокой точности вычислений. Формулы Рунге-Кутта третьего порядка (q= 3) имеют следующий вид:
Наиболее часто используется метод Рунге-Кутта четвертого порядка, для которого расчетные формулы имеют следующий вид:

Формулы Рунге-Кутта имеют погрешности порядка h q +1 . Погрешность метода Рунге-Кутта четвертого порядка имеет порядок h 5
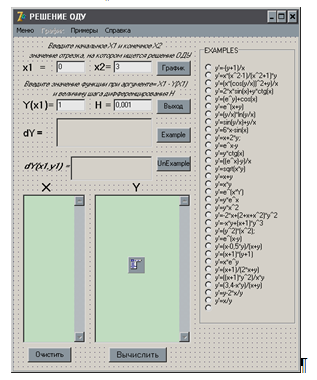
4.2 Описание программы ” РЕШЕНИЕ ОДУ “
Программа ”Решение ОДУ“ достаточно проста в использовании.
При запуске программы открывается главное окно программы (рис. 4 ), с установленными по умолчанию начальными условиями в полях ввода.
Назначение элементов ввода данных.
1. Поля X 1, X 2, Y ( x 1), H предназначены для ввода начального и конечного значений отрезка, на котором ищется решение дифференциального уравнения, значения функции при аргументе равном Х1 и величины шага дифференцирования;
2. В поле dY выводится формула дифференциального уравнения 1-й степени, выбранная для решения;
3. В поле dY ( x 1, y 1) выводится значение производной в исходной точке.
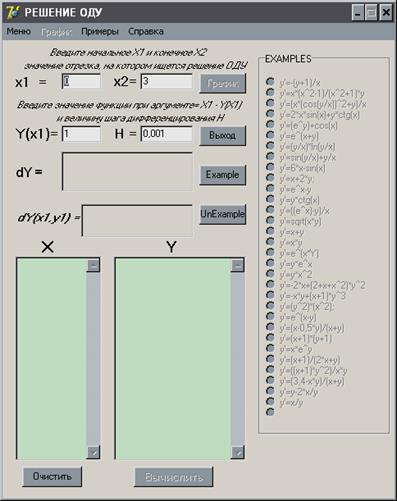
Назначение элементов управления и контроля.
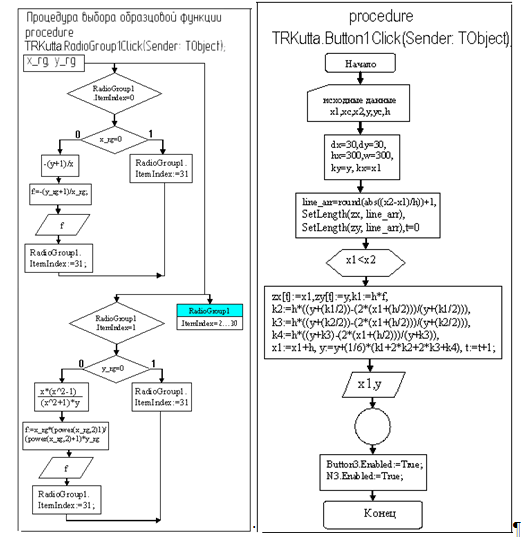
1. При нажатии кнопки EXAMPLE активируются “радиокнопки” выбора уравнений;
2. Щелчком “радиокнопки” выбирается соответствующее ей уравнение, вид формулы контролируется по её отображению в поле dY ;
3. Щелчком по кнопке ВЫЧИСЛИТЬ находятся приближенные решения выбранного дифференциального уравнения на заданном интервале;
4. Решения дифференциального уравнения в виде пар значений X — Y выводятся в поля X и Y ; (рис. 5.)
По окончании вычислений активируются кнопка ГРАФИК и пункт меню ГРАФИК главного окна системы.

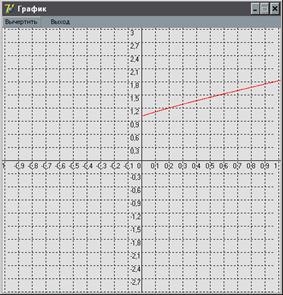
4.3 Назначение элементов графического окна программы
Вход в графическое окно осуществляется с помощью кнопок ГРАФИК наглавной формеили пункт меню ГРАФИК (рис. 6).
С помощью кнопки ВЫЧЕРТИТЬ на координатную плоскость выводится график функции – решение дифференциального уравнения на заданном интервале.
4.4 Реакция программы при возникновении ошибок
При вводе пользователем ошибочных данных (отсутствии начальных условий, некорректных значений переменных) программа выдает сообщение об ошибке (рис.7 а, б) рис.7 а. рис.7 б.


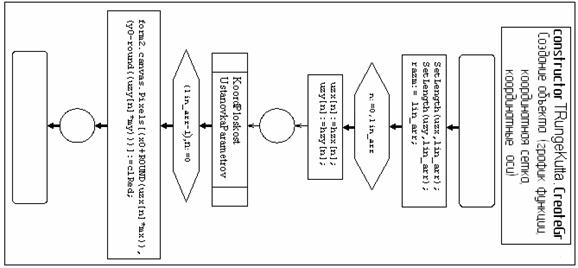
4.5 Перечень компонент DELPHI использованных в программе
В Form 1 использованы компоненты:
— Edit1.text, Edit2.text, Edit3.text, Edit4.text – для ввода начальных условий дифференциального
— Memo4.TMemo – для вывода формулы уравнения;
— Memo1.TMemo, Memo2.TMemo — для вывода результатов вычислений;
— Memo3.TMemo – для вывода значения производной в точке (Х0,Y0)
— ScrollBars ssVertical всвойствахMemo1.TMemo, Memo2.TMemo;
— Button1 “Вычислить”, Button2 “Очистить”, Button3 “График”, Button4 “Выход”,
Button5 “Example”, Button6 “UnExample”;
— Label1.TLabel — Label9.TLabel – дляотображенияназначениякомпонентов Memo иEdit;
— RadioGroup – для выбора вида уравнения;
В Form 2 использованы компоненты:
— MainMenu- для построения графика;
В Form 3 использованы компоненты:
— Panel1.TPanel – для размещения информации о программе;
— Label1.TLabel – Label14.TLabel – для отображения информации о программе;
— Button1.TButton “OK” – для выхода из окна
5. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ И ТРЕБОВАНИЯ К ПО
Программа работает в среде операционных систем Windows 9х, NT.
Требования к ПО
Минимальные системные требования
aпроцессор Intel 486 с рабочей частотой 66 MHz и выше;
b) операционная система Windows 95, 98, NT 4.0, 2000, XP;
с) 16 Мбайт оперативной памяти (или более);
d) 3 Мбайт свободного пространства на жёстком диске.
6. ТЕКСТ ПРОГРАММЫ
Windows, Messages, SysUtils, Classes, Graphics, Controls, Forms, Dialogs,
StdCtrls, CheckLst, ComCtrls, ExtCtrls,math, Menus;
Видео:МЗЭ 2022 Численное решение дифференциальных уравнений. Неявный метод Эйлера. Ложкин С.А.Скачать

Метод Рунге-Кутта решения дифференциальных уравнений и их систем
Delphi site: daily Delphi-news, documentation, articles, review, interview, computer humor.
Метод Рунге-Кутта решения дифференциальных уравнений и их систем
Метод позволяет решать системы обыкновенных дифференциальных уравнений (ОДУ) первого порядка следующего вида:  ,
,  ,
,
и т.д.,
которые имеют решение:
 ,
,  ,
,
и т.д.,
где t – независимая переменная (например, время); X, Y и т.д. – искомые функции (зависимые от t переменные). Функции f, g и т.д. – заданы. Также предполагаются заданными и начальные условия, т.е. значения искомых функций в начальный момент.
Одно дифференциальное уравнение – частный случай системы с одним элементом. Поэтому, далее речь пойдет для определенности о системе уравнений.
Метод может быть полезен и для решения дифференциальных уравнений высшего (второго и т.д.) порядка, т.к. они могут быть представлены системой дифференциальных уравнений первого порядка.
Метод Рунге-Кутта заключается в рекурентном применении следующих формул: 

.
где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,

Реализация Метода Рунге-Кутта на Delphi может выглядеть так (привожу полностью модуль):
type
TVarsArray = array of Extended; // вектор переменных включая независимую
TInitArray = array of Extended; // вектор начальных значений
TFunArray = array of function(VarsArray: TVarsArray ):Extended;
// вектор функций
TResArray = array of array of Extended; // матрица результатов
TCoefsArray = array of Extended; // вектор коэффициетов метода
function Runge_Kutt( // метод Рунге-Кутта
FunArray: TFunArray; // массив функций
First: Extended; // начальная точка по независимой координате
Last: Extended; // конечная точка по независимой координате
Steps: Integer; // число шагов по независимой координате
InitArray: TInitArray; // вектор начальных значений
var Res: TResArray // матрица результатов включая независ. переменную
):Word;
// возвращаемое значение — код ошибки
implementation
Function Runge_Kutt( // метод Рунге-Кутта
FunArray: TFunArray; // массив функций
First: Extended; // начальная точка по независимой координате
Last: Extended; // конечная точка по независимой координате
Steps: Integer; // число шагов по независимой координате
InitArray: TInitArray; // вектор начальных значений
var Res: TResArray // матрица результатов включая независ. переменную
):Word; // возвращаемое значение — код ошибки
var
Num: Word; // число уравнений
NumInit: Word; // число начальных условий
Delt: Extended; // шаг разбиения
Vars: TVarsArray; // вектор переменных включая независимую
Vars2,Vars3,Vars4: TVarsArray; // значения перем. для 2-4 коэф.
Coefs1: TCoefsArray; // вектор 1-ыx коэффициентов в методе
Coefs2: TCoefsArray; // вектор 2 коэффициентов в методе
Coefs3: TCoefsArray; // вектор 3 коэффициентов в методе
Coefs4: TCoefsArray; // вектор 4 коэффициентов в методе
I: Integer; // счетчик цикла по иттерациям
J: Word; // индекс коэф.-тов метода
K: Integer; // счетчик прочих циклов
begin
Num:=Length(FunArray); // узнаем число уравнений
NumInit:=Length(InitArray); // узнаем число начальных условий
If NumInitNum then
begin
Result:=100; // код ошибки 100: число уравнений не равно числу нач. усл.
Exit;
end;
Delt:=(Last-First)/Steps; // находим величину шага разбиений
SetLength(Res,Num+1,Steps+1); // задаем размер матрицы ответов с незав. перем.
SetLength(Vars,Num+1); // число переменных включая независимую
SetLength(Vars2,Num+1); // число переменных для 2-го коэф. включая независимую
SetLength(Vars3,Num+1); // число переменных для 3-го коэф. включая независимую
SetLength(Vars4,Num+1); // число переменных для 4-го коэф. включая независимую
SetLength(Coefs1,Num); // число 1-ыx коэф. метода по числу уравнений
SetLength(Coefs2,Num); // число 2-ыx коэф. метода по числу уравнений
SetLength(Coefs3,Num); // число 3-иx коэф. метода по числу уравнений
SetLength(Coefs4,Num); // число 4-ыx коэф. метода по числу уравнений
// Начальные значения переменных:
Vars[0]:=First;
For K:=0 to NumInit-1 do Vars[K+1]:=InitArray[K];
For J:=0 to Num do Res[J,0]:=Vars[J]; // первая точка результата
For I:=0 to Steps-1 do // начало цикла иттераций
begin
For J:=0 to Num-1 do Coefs1[J]:=FunArray[J](Vars)*delt; // 1-й коэфф.
// Находим значения переменных для второго коэф.
Vars2[0]:=Vars[0]+delt/2;
For K:=1 to Num do Vars2[K]:=Vars[K]+Coefs1[K-1]/2;
For J:=0 to Num-1 do Coefs2[J]:=FunArray[J](Vars2)*delt; // 2-й коэф.
// Находим значения переменных для третьго коэф.
Vars3[0]:=Vars[0]+delt/2;
For K:=1 to Num do Vars3[K]:=Vars[K]+Coefs2[K-1]/2;
For J:=0 to Num-1 do Coefs3[J]:=FunArray[J](Vars3)*delt; // 3 коэфф.
// Находим значения переменных для 4 коэф.
Vars4[0]:=Vars[0]+delt;
For K:=1 to Num do Vars4[K]:=Vars[K]+Coefs3[K-1];
For J:=0 to Num-1 do Coefs4[J]:=FunArray[J](Vars4)*delt; // 4 коэфф.
// Находим новые значения переменных включая независимую
Vars[0]:=Vars[0]+delt;
For K:=1 to Num do
Vars[K]:=Vars[K]+(1/6)*(Coefs1[K-1]+2*(Coefs2[K-1]+Coefs3[K-1])+Coefs4[K-1]);
// Результат иттерации:
For J:=0 to Num do Res[J,I+1]:=Vars[J];
end; // конец итераций
Result:=0; // код ошибки 0 — нет ошибок
end;
Модуль полностью работоспособен. Возвращаемое функцией Runge_Kutt значение – код ошибки. Вы можете дополнить список ошибок по своему усмотрению. Рассчитанные функции системы помещаются в массив Res. Чтобы не загромождать код, в модуле опущены проверки (типа блоков try). Рекомендую их добавить по своему усмотрению.
Ниже приводится описание функции Runge_Kutt и типов, использующихся в модуле.
Function Runge_Kutt (FunArray: TFunArray; First: Extended; Last: Extended; Steps: Integer; InitArray: TInitArray; var Res: TResArray):Word;
Здесь:
FunArray — вектор функций (правых частей уравнений системы);
First, Last — начальная и конечная точки расчетного интервала;
Steps — число шагов по расчетному интервалу;
InitArray — вектор начальных значений
Res — матрица результатов включая независимую переменную.
В модуле описаны типы:
type
TVarsArray = array of Extended; // вектор переменных включая независимую
TInitArray = array of Extended; // вектор начальных значений
TFunArray = array of function(VarsArray: TVarsArray ):Extended; // вектор функций
TResArray = array of array of Extended; // матрица результатов
TCoefsArray = array of Extended; // вектор коэффициетов метода
Функция возвращает коды ошибок:
0 – нет ошибок;
100 — число уравнений не равно числу начальных условий.
Решение содержится в переменной-матрице Res. Первый индекс матрицы относится к переменной (0 – независимая переменная, 1 – первая зависимая и т.д.), второй – к номеру расчетной точки (0 – начальная точка).
Рассмотрим один пример использования модуля. Создадим новое приложение и подключим к нему модуль. На форме приложения разместим кнопку Button1 и область текста Memo1. Поместим в приложение две функции и обработчик нажатия кнопки:
//Задаем функции (правые части уравнений)
function f0(VarArray:TVarsArray):extended;
begin
Result:=4*VarArray[0]*VarArray[0]*VarArray[0];
end;
function f1(VarArray:TVarsArray):extended;
begin
Result:=1;
end;
procedure TForm1.Button1Click(Sender: TObject);
var
I: Integer;
FunArray: TFunArray; // массив функций
First: Extended; // начальная точка по независимой координате
Last: Extended; // конечная точка по независимой координате
Steps: Integer; // число шагов по независимой координате
InitArray: TInitArray; // вектор начальных значений
Res: TResArray; // матрица результатов включая независ. переменную
begin // Создаем вектор функций:
SetLength(FunArray,2);
FunArray[0]:=f0;
FunArray[1]:=f1;
// Задаем интервал и число шагов:
First:=0;
Last:=10;
Steps:=10;
// Задаем начальные условия:
SetLength(InitArray,2);
InitArray[0]:=0;
InitArray[1]:=0;
// Вызов метода и получение результатов:
Memo1.Lines.Clear;
I:=Runge_Kutt(FunArray, First, Last, Steps, InitArray, Res);
ShowMessage(‘Код ошибки = ‘+IntToStr(I));
For I:=0 to Steps do
Memo1.Lines.Add(floattostr(Res[0,I])+’ ‘+floattostr(Res[1,I])+’ ‘+floattostr(Res[2,I]));
end;
Модуль с примером и справкой можно скачать: русский вариант (бесплатно) или английский вариант (условно-бесплатно).
Copyright© 2006 Андрей Садовой Специально для Delphi Plus
💥 Видео
Численное решение задачи Коши методом ЭйлераСкачать
Численное решение дифференциальных уравнений (задачи Коши)Скачать

Решение системы дифференциальных уравнений методом ЭйлераСкачать

Так теперь уже точно началось ХазинСкачать

Численное решение дифференциальных уравнений ч.1Скачать

Метод ЭйлераСкачать

01.02. Модель SIR. Численное решение системы дифференциальных уравнений с помощью SciPyСкачать

Лукьяненко Д. В. - Дифференциальные уравнения - Лекция 1Скачать

#9 Программирование в Delphi. Математические операцииСкачать

Частное решение дифференциального уравнения. 11 класс.Скачать

Самый короткий тест на интеллект Задача Массачусетского профессораСкачать

Python - численное решение дифференциального уравнения 1го порядка и вывод графикаСкачать

Сеточные методы решения дифференциальных уравнений в частных производных.Скачать