Алгоритм ориентации бесплатформенной инс на основе модифицированного матричного уравнения пуассона
Обновлено
Поделиться
Просмотров1554
Алгоритм идеальной работы автономных БИНС
УТВЕРЖДАЮ
Директор ЦНИИ «Электроприбор»
Академик РАН
В.Г. Пешехонов
«_____»__________________2013 г.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
по проведению в учебном центре ЦНИИ «Электроприбор» лабораторной работы
Имитационное моделирование алгоритма работы бесплатформенной инерциальной навигационной системы
Цель работы
Целью данной работы является имитационное моделирование алгоритмов идеальной работы автономной бесплатформенной инерциальной навигационной системы (БИНС) и изучение влияния точностных характеристик ее чувствительных элементов на погрешность выработки кинематических параметров.
Целью работы является также ознакомление с методами нелинейного динамического моделирования в пакете Simulink.
Общие сведения
Сутьинерциального метода навигации заключается в интегрировании в реальном масштабе времени дифференциальных уравнений поступательного движения ц.м. подвижного объекта. В качестве исходной информации (первичных навигационных измерений) здесь используются измерения вектора кажущегося ускорения,которые осуществляются с помощью акселерометров. Системы, реализующие данный метод, принято называть инерциальными навигационными системами (ИНС).
Линейные акселерометры – это измерительные приборы, которые реагируют на линейное ускорение своего основания (корпуса) по отношению к свободно падающему телу и используются для измерения этого, т. е. кажущегося ускорения основания, на котором они установлены.
(1)
здесь — радиус-вектор, определяющий положение корпуса прибора относительно ц.м. Земли;
— удельная сила притяжения Земли в центре корпуса акселерометра и являющаяся функцией радиус-вектора .
Уравнение (1) иногда называют основным уравнением инерциальной навигации, т.к. в его интегрировании и состоитсущность метода инерциальной навигации. Т.е. по измеренным составляющим вектора и априори известной зависимости путем двойного интегрирования при известных начальных условиях и заданной или вычисленной ориентации измерительных осей акселерометров относительно навигационных осей можно определять линейную скорость и координаты местоположения подвижного объекта.
Задачей ИНС является выработка кинематических параметров движения объекта: как навигационных (характеризующих поступательное движение ц.м. объекта в низкочастотной области спектра), так и динамических (характеризующих высокочастотное угловое и линейное движение с учетом рыскания, качки и орбитального движения некоторой точки корабля относительно его ц.м.).
Алгоритм идеальной работы автономных БИНС
В состав БИНС входят инерциальный измерительный модуль (ИИМ), содержащий чувствительные элементы – акселерометры и гироскопы, и вычислитель, реализующий алгоритмы работы БИНС. При этом акселерометры вырабатывают первичную навигационную информацию (производят первичные навигационные измерения). Гироскопы в БИНС — три датчика угловой скорости (ДУС) типа лазерного, волоконно-оптического или микромеханического гироскопа используются для определения (вычисления) угловой ориентации блока акселерометров относительно выбранной навигационной системы координат.
Вырабатываемыми кинематическими параметрами (выходная информация вычислителя) являются:
— углы курса, бортовой и килевой качки, определяющие ориентацию осей ИИМ БИНС относительно сопровождающего географического трехгранника ;
— восточная, северная и вертикальная составляющие линейной скорости объекта относительно Земли;
— широта, долгота и высота места объекта.
Первичными навигационными измерениями (исходной информацией для выработки выходных данных) ИИМ на ДУС являются:
— составляющие вектора кажущегося ускорения на оси ИИМ;
— составляющие вектора угловой скорости вращения трехгранника на свои оси.
Рис. 1. Блок-схема алгоритма идеальной работы автономных БИНС
Блок-схема алгоритма идеальной работы автономных БИНС приведена на рис.1 и состоит из следующих блоков:
1. Решение задачи ориентации
Определение ориентации ИИМ БИНС, содержащего блок акселерометров, и подвижного объекта в целом относительно сопровождающего географического трехгранника с целью приведения сигналов акселерометров к осям навигационного сопровождающего трехгранника необходимой для последующего решения навигационной задачи. Ориентация объекта и блока акселерометров в частности задаётся матрицей направляющих косинусов, т.е. матрицей перехода от осей связанных с объектом (рис. 2) к географическим осям (рис. 3). Обычно оси ИИМ совпадают со связанными с объектом.
Задача ориентации решается с использованием данных блока гироскопов. В БИНС с ИИМ на ДУС — это интегрирование кинематических уравнений вращательного движения объекта с целью вычисления матрицы ориентации
Рис.2. Система координат , связанная с корпусом объекта
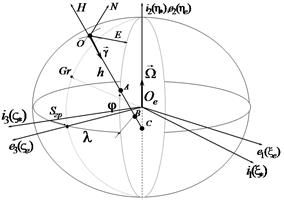
Рис.3. Географический сопровождающий трехгранник и инерциальная СК
Кинематические уравнениясвязывают вектор угловой скорости вращения объекта с производными по времени от параметров ориентации. Вид кинематических уравнений определяется в зависимости от кинематических параметров, поэтому для углов Эйлера-Крылова, направляющих косинусов, и параметров Родрига-Гамильтона уравнения различны. Для решения кинематических уравнений, как и для любых других дифференциальных уравнений, должны быть известны начальные условия, для чего решается задача начальной выставки.
Для углов Эйлера-Крылова
Когда преобразование задается тремя последовательными плоскими поворотами на углы курса, килевой и бортовой качки , то кинематические уравнения имеют следующий вид
,
, (2)
,
где – проекции на свои оси угловой скорости вращения географического сопровождающего трехгранника относительно инерциальной СК .
Матрица ориентации вычисляется следующим образом
. (3)
Для направляющих косинусов (уравнение Пуассона)
Если на борту подвижного объекта необходимо определять его ориентацию относительно системы координат, которая вращается в инерциальном пространстве, например, географического сопровождающего трехгранника , тогда необходимо воспользоваться обобщенным уравнением Пуассона
, (4)
где — кососимметрическая матрица, соответствующая вектору ;
— кососимметрическая матрица, соответствующая вектору угловой скорости вращения географического сопровождающего трехгранника относительно инерциальной СК в проекции на свои оси.
В кватернионной форме для кватерниона осуществляющий переход от географического сопровождающего трехгранника к связанному кинематические уравнения имеют вид
(5)
где – гиперкомплексное отражение вектора ;
– гиперкомплексное отражение вектора угловой скорости вращения географического сопровождающего трехгранника относительно инерциальной СК в проекции на свои оси.
Или в матричной форме:
. (6)
Матрица ориентации формируется по параметрам Родрига-Гамильтона следующим образом
. (7)
2. Выработка углов курса, бортовой и килевой качки
Если кинематические уравнения представлены в виде (4,5), то зная элементы матрицы ориентации можно вычислить выходные параметры ориентации, т.е. углы по следующим формулам:
, , , (8)
где — элементы матрицы ориентации .
Поскольку модули углов и меньше 90º, то приведенные выше выражения однозначно определяют значения углов килевой и бортовой качек. Внутри диапазона от 0 до 360º функция разрывов не имеет и однозначно определяет значение угла .
3. Преобразование сигналов акселерометров
Используя решение задачи ориентации, значения вектора кажущегося ускорения, измеряемого блоком акселерометров в осях ИИМ, преобразуются к осям географического сопровождающего трехгранника следующим образом
. (9)
4. Выделение из сигналов акселерометров полезной информации
Так как задача навигации подвижного объекта решается вблизи поверхности Земли, то из сигналов акселерометров , приведенных к осям географического сопровождающего трехгранника, необходимо исключить так называемые «вредные» ускорения, определяющие кориолисово и переносное ускорения ц.м. объекта или точнее точки расположения блока акселерометров на объекте, а также составляющие вектора ускорения силы тяжести.
Значения «вредных» ускорений формируются в вычислителе БИНС по данным, вырабатываемым самой БИНС, и априорным данным о параметрах Земли: форме, размерах и угловой скорости вращения, по следующим формулам:
(10)
Для формирования модельных значений вектора необходимо располагать соответствующей моделью гравитационного поля Земли:
, (11)
где м/с 2 , для параметров эллипсоида Красовского: b=0.0053171, b1=0.0000071.
5. Интегрирование сигналов акселерометров,
Сигналы акселерометров «очищенных» от «вредных» ускорений интегрируются с привлечением начальных условий о составляющих вектора линейной скорости объекта в навигационных осях:
(12)
6. Вычисление текущих значений составляющих
вектора угловой скорости вращения географического сопровождающего трехгранника по данным о составляющих вектора линейной скорости объекта в навигационных осях, радиусах кривизны нормальных сечений и широте места для формирования обратной связи в задачу ориентации.
Составляющие определяются соотношениями
, , , (13)
где °/ч — угловая скорость суточного вращения Земли.
Радиусы кривизны нормальных сечений:
(14)
м – параметры эллипсоида Красовского.
7. Решение навигационной задачи
Интегрирование составляющих вектора линейной скорости объекта в навигационных осях с привлечением начальных условий о координатах места объекта
Видео:Матричные уравнения Полный разбор трех типов матричных уравненийСкачать
Алгоритм ориентации бесплатформенной инс на основе модифицированного матричного уравнения пуассона
Библиографическая ссылка на статью: Паршин А.П. Исследование бесплатформенной инерциальной навигационной системы с неортогональным расположением чувствительных элементов // Современные научные исследования и инновации. 2020. № 4 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2020/04/91917 (дата обращения: 13.04.2022).
Математическая модель БИНС
Алгоритмы БИНС подробно описаны в работах как отечественных, так и зарубежных авторов, например, [6, 33, 36, 42]. Алгоритм навигации служит для определения положения центра масс подвижного объекта относительно земной системы координат. Для решения задачи навигации используются данные об ускорении объекта, измеренные акселерометрами в связанной системе координат. Основная идея инерциальной навигации – это двукратное интегрирование измеренных ускорений. Способом построения БИНС является размещение инерциальных датчиков акселерометров и гироскопов непосредственно на борту подвижного объекта, а функции гиростабилизированной платформы, привязанной к земной системе координат, выполняет бортовой вычислитель. Алгоритм БИНС основан на кинематических уравнениях подвижного объекта в земной системе координат:
где VZg, VXg – составляющие линейной скорости объекта соответственно вдоль оси Zg и Xg географической системы координат; U – угловая скорость вращения Земли; ц – широта местоположения объекта; R – средний радиус земного эллипсоида. На основе (2.1) угловая скорость движения объекта относительно Земли определяется следующими соотношениями:
Для получения координат объекта ц, л, h в географической системе необходимо иметь информацию о линейных скоростях объекта V XG , V YG , V ZG . Эту информацию получают путем интегрирования соответствующих ускорений. В БИНС датчики ускорений – акселерометры устанавливают по осям связанной системы координат, они измеряют кажущееся ускорение. Следует отметить, что абсолютное ускорение имеет следующие составляющие:
где ap, ak, ao – составляющие ускорения соответственно переносного, кариолисова, относительного. Кариолисово ускорение возникает при взаимодействии переносной угловой скорости вращения Земли и линейной скорости объекта. Проекции кариолисова ускорения на оси OX g Y g Z g имеют вид:
Относительное ускорение возникает при движении объекта вокруг Земли и при изменении линейной скорости, его составляющие на оси OX g Y g Z g имеют вид:
Переносное ускорение вызвано угловой скоростью вращения Земли, и его составляющие в пересчете в земную систему координат определяются соотношениями:
Акселерометры, жестко установленные в связанной системе координат, измеряют проекции кажущегося ускорения, в которых учитываются все три составляющие: кариолисово, относительное и ускорения силы тяжести. Путем пересчета кажущегося ускорения в географическую систему координат получают составляющие n Xg , n Yg , n Zg :
где , – составляющие ускорения объекта соответственно по осям Z g , Y g ,X g географической системы координат. Для использования в навигационном алгоритме БИНС показаний акселерометров из них необходимо извлечь , – составляющие ускорения объекта соответственно по осям Zg, Yg, Xg географической системы координат путем удаления из них вредных составляющих: ускорения Кариолиса, относительного ускорения и ускорения силы тяжести.
где Дn Zg , Дn Yg , Дn Xg – вредные составляющие: ускорения Кариолиса, относительного ускорения и ускорения силы тяжести соответственно по осям Z g , Y g , X g географической системы координат:
где V Zg (t 0 ), V Yg (t 0 ), V Xg (t 0 ) – составляющие вектора скорости в начальный момент времени t 0 . Угловые координаты объекта и высота определяются при вторичном интегрировании (2.2) с учетом начальных значений координат и высоты:
где ц 0 , л 0 , h 0 – составляющие координат объекта в начальный момент времени t 0 . Навигационный алгоритм БИНС, основанный на приведенных формулах, представлен на рис. 2.1 в виде структурной схемы [33].
Моделирование БИНС в среде Matlab Simulink.
Навигационный алгоритм БИНС, основанный на выражениях 2.1-2.11, представленный на рис. 2.1 в виде структурной схемы содержит конвертор вектора кажущегося ускорения с акселерометров для пересчета в земную систему координат, работающий на основе кватернионного умножения L*N*L , где L , N – кватернионы соответственно углов Эйлера и ускорений. На вход конвертора поступает вектор N = [ nX , nY , nZ ], на выходе получается вектор Ng = [ nXg , nYg , nZg ], необходимый для работы БИНС. Математическая модель БСО, хотя и не включена в схему БИНС, является составной частью алгоритма БИНС, т.к. определение угловой ориентации подвижного объекта необходимо для решения задачи навигации. Схема содержит следующие блоки: 1. Блок имитации параметров движения объекта, который осуществляет имитацию углового движения объекта с учетом изменения углов х, г, ш по синусоидальным законам и с учетом движения объекта вдоль Земли с линейной скоростью. Также этот блок осуществляет имитацию абсолютного ускорения объекта с учетом эволюции ускорений по осям географической системы координат по синусоидальным законам; 2. Блок основных датчиков (ДУС и акселерометры) выдает три составляющих абсолютной угловой скорости ( щ XS , щ YS , щ ZS ) и три компоненты кажущегося ускорения в связанной системе координат ( nX , nY , nZ ); 3. Блок дополнительных датчиков вычисляет данные об угловом движении объекта на основе избыточной информации (в данном случае с акселерометров и магнитометров); 4. Блок БСО, осуществляет решение кинематических уравнений углового движения объекта на основе информации, получаемой с ДУС и с дополнительных датчиков; 5. Блок БИНС осуществляет интегрирование скомпенсированных сигналов акселерометров и выдает координаты объекта в виде параметров ц, л, h ; Модель БИНС в среде Matlab Simulink представлена на рис. 2.2. На схеме в качестве основных датчиков представлены ДУС и акселерометры, играющие основную роль в работе БИНС, а также магнитометры, позволяющие реализовать комплексирование БСО. В схеме имеется блок имитации исходных данных для задания углов ш, х, г и параметров ускорения объекта в земной системе координат (в данном случае по синусоидальным законам в разрешенных пределах). Задание других необходимых параметров для функционирования БСО и БИНС осуществляется в соответствующих блоках модели. Схема модели БИНС содержит следующие блоки: Блок Imitate имитирует угловое движение БПЛА с учетом изменения углов тангажа, крена и рыскания по синусоидальным законам и с учетом движения аппарата вдоль Земли с линейной скоростью. Кроме того, блок имитирует абсолютное ускорение аппарата по синусоидальному закону в географической системе координат.
Блок Model Sensor включает датчики измерительного модуля IMU (ДУС, акселерометр и магнитометр) и формирует три составляющие абсолютной угловой скорости (, три компоненты кажущегося ускорения в связанной системе координат ( , а также проекции вектора напряженности магнитного поля Земли ( на оси связанной системы координат. Блок моделирования ускорений Acseleromete, входящий в состав блока Model Sensor работает на основе данных о составляющих ускорения объекта соответственно по осям географической системы координат, данных об угле широты места ц и значений ускорения свободного падения. Сначала в блоке вырабатываются сигналы по известным формулам (2.7) [36]. Затем они пересчитываются в данные для выходов акселерометров – Nk с помощью матрицы направляющих косинусов Ao . Выражение (2.7) содержит все составляющие кажущегося ускорения в земной системе координат :Ng=[nXg, nYg, nZg]. Далее, пересчитав компоненты nXg, nYg, nZg в связанную систему координат, получим компоненты кажущегося ускорения непосредственно с выходов датчиков – акселерометров ( nX,nY,nZ ). Блок Algoritm Quter системы ориентации, осуществляет решение кинематического уравнения Пуассона в кватернионах углового движения БПЛА на основе информации, получаемой с ДУС и дополнительных датчиков. Схема блока представлена на рис. 2.3.
Блок Algoritm Bins осуществляет интегрирование скомпенсированных сигналов акселерометров и выдает координаты объекта в виде параметров ц, л, h. В блок подается вектор кажущегося ускорения, полученный в результате компенсации ошибок в земной системе координат: Ng = [nXg, nYg, nZg], на выходе в результате интегрирования получается вектор координат C = [ц,л, h] . Схема блока представлена на рис. 2.4. Блок Kor Acsel вычисляет ошибки акселерометров, связанные с кажущимся ускорением. Эти ошибки в виде поправки dNg компенсируются перед интегрированием сигналов ускорений – в итоге получаются истинные координаты объекта. Схема блока работает на основе формул (2.9). Блок WgSK предназначен для получения данных в виде вектора Ng путем преобразования данных с акселерометров в земную систему координат.
Моделирование проводилось для конкретного режима полета летательного аппарата. По угловому положению законы изменения углов синусоидальные: курса – амплитуда , частота 0,1 Гц; тангаж — , частота 0,15 Гц; крен — , частота 0,2 Гц. Время моделирования 100 с. По ускорениям ЛА на основе синусоидальных законов в земной системе координат: по оси Xg: с амплитудой Vpxa = 4,5 м/с 2 ; начальным значением Vpxb = 0 м/с 2 ; частотой Vpxw = 0,3 Гц; по оси Yg: с амплитудой Vpya = 2,0 м/с 2 ; начальным значением Vpyb = 0 м/с 2 ; частотой Vpyw = 0,4 Гц; по оси Zg: с амплитудой Vpza = 3,0 м/с 2 ; начальным значением Vpzb = 0 м/с 2 ; частотой Vpzw = 0,2 Гц. По скоростям в земной системе координат – начальные значения: Vxo = 300; Vyo = 0; Vzo = 150. По навигационным координатам – начальные значения: ц o = 50 град; лo = 36 град; ho = 1000 м. Проводилась симуляция заданного режима полета и совместной работы БСО и БИНС в течение 100 с. Задачей исследования эффективности БИНС является анализ точности оценивания координат подвижного объекта. С этой целью на основе информации об идеальных значениях скорости БПЛА, полученной в земной системе координат путем интегрирования истинных ускорений, предварительно вычисляются идеальные значения координат ЛА: ц, л, h. Для моделирования показаний неортогонально расположенного блока в сигнал одного из модулей (гироскопа, а затем и акселерометра), вносились дополнительная составляющая (до 10% моделируемого сигнала) и шум в пределах паспортных данных модуля. Погрешности ориентации определялись относительно данных ортогонально расположенного измерительного модуля. На первом этапе моделирования была использована модель исследования БИНС, представленная на рис. 2.5.
На этом этапе исследовался алгоритм ориентации БИНС в параметрах Родрига-Гамильтона (в кватернионах) с целью его использования для решения задач рационального управления. Погрешности ориентации по параметрам Родрига-Гамильтона проведен в составе БИНС. Ошибки не превышают 0.05 градуса при всех вариантах БСО.
На втором этапе моделирования исследовалось поведение БИНС при различных комбинациях измерителей. Определялись параметры ориентации и результаты решения навигационной задачи в случае выхода из строя гироскопа одного из модулей (на графиках обозначено 1) и акселерометра (на графиках обозначено 2). Результаты моделирования представлены на рис. 2.7 – 2.10.
Анализ полученных результатов показывает, что выход из строя гироскопа практически не влияет на решение навигационной задачи, а ошибки определения высоты находятся в пределах д h max =7%. Выход из строя акселерометра приводит к ошибкам решения навигационной задачи: по широте Д ϕ max = 14.5″ и Дл max = 11″, что соответствует погрешности определения широты в 448 м и долготы в 322 м. При этом погрешности ориентации значительно увеличиваются при всех вариантах комбинаций измерителей.
Методы, алгоритмы и структура программно-технического комплекса бесплатформенной инерциальной навигационной системы Легостаев, Владимир Леонидович
480 руб. | 150 грн. | 7,5 долл. ‘, MOUSEOFF, FGCOLOR, ‘#FFFFCC’,BGCOLOR, ‘#393939’);» onMouseOut=»return nd();»> Диссертация — 480 руб., доставка 10 минут , круглосуточно, без выходных и праздников
Автореферат — бесплатно , доставка 10 минут , круглосуточно, без выходных и праздников
Легостаев, Владимир Леонидович. Методы, алгоритмы и структура программно-технического комплекса бесплатформенной инерциальной навигационной системы : диссертация . кандидата технических наук : 05.13.05 / Легостаев Владимир Леонидович; [Место защиты: Моск. гос. ин-т электроники и математики].- Москва, 2011.- 132 с.: ил. РГБ ОД, 61 11-5/2585
Содержание к диссертации
Глава 1. Анализ основных характеристик навигационных систем 9
1.1 Параметры движения и средства их измерения 9
1.2 Спутниковая навигационная система 13
1.3 Инерциальная навигационная система 15
1.4 Бесплатформенная инерциальная навигационная система 16
1.5 Системы координат 19
1.6. Методы комплексирования навигационной информации 22
Глава 2. Математические модели инерциальных систем навигации 35
2.1 Принципы инерциальной навигации 35
2.2 Скалярные уравнения инерциальной навигации 37
2.3 Алгоритм БИНС для работы в географической системе координат 41
2.4 Алгоритм ориентации БИНС 46
2.5 Алгоритм БИНС короткого времени функционирования 49
Глава 3. Анализ основных элементов комплекса с БИНС 55
3.1 Инерциальный измерительный блок 55
3.2 Акселерометры 56
3.3 Гироскопические датчики 58
3.4 Волоконно-оптический гироскоп 62
3.5 Виды погрешностей 71
3.6 Особенности применения аналого-цифровых преобразователей в БИНС 73
3.7 Компенсация погрешностей 75
Глава 4. Реализация программно-технического комплекса ориентации и навигации БИНС 79
4.1 Аппаратная часть комплекса БИНС 79
4.2 Алгоритмы ориентации и навигации БИНС 85
4.3 Программное обеспечение комплекса 89
Глава 5. Исследование характеристик программно-технического комплекса БИНС 103
5.1 Тестирование на неподвижном основании 106
5.2 Моделирование полета без спутниковой навигационной системы 112
5.3 Моделирование полета со спутниковой навигационной системой 118
Основные положения и выводы 124
Введение к работе
Актуальность темы. Существенная роль в расширении возможностей подвижных объектов различных областей применения отводится системам ориентации и навигации. Современный прогресс в области вычислительной техники и микроэлектроники оказывает влияние на приборостроение в целом и позволяет расширить технические характеристики систем навигации и управления. Это достигается путем использования программно-аппаратных средств, при этом программная часть системы выполняется в виде программы для специализированного вычислителя. Совершенствование и развитие навигационных систем позволяет решать сложные задачи управления движением различных объектов. Физические принципы определения координат навигационных источников могут быть различны, определения могут производиться в различных системах координат и представлять наблюдения различных параметров движения. Нередко системы, выполняющие данные задачи, объединяют в программно-технические комплексы (ПТК) ориентации и навигации.
Значительный вклад в разработку эффективных методов и средств навигации внесли: Андреев В.Д., Бабич О.А., Бромберг П. В., Бранец В.Н., Воробьев А.В., Голован А.А., Джанджгава Г.И., Дмитроченко Л.А., Ишлинский А.Ю., Коновалов СВ., Красовский А.А., Парусников Н.А., Пешехонов В.Г., Плотников П.К., Помыкаев И.И., Распопов В.Я., Репников А.В., Селезнев В.П., Синяков А.Н., Тихомиров В.В., Фридлендер Г.О., Черноморский А.И., Шмыглевский И.П., Эльясберг П.Е. и др. Среди зарубежных исследователей в этой области следует отметить V. Dishel, W.L. Fried, A.D. King, M. Kayton, P.G. Savage, Lawrence A., Angus P.A., Mohinder S.G., Titterton D.H., Weston J.L. и др.
Большинство навигационных систем, применяемых для летательных аппаратов, в качестве основных источников первичной навигационной информации используют гироскопические, инерциальные, астрономические, радиотехнические и магнитные системы угловой ориентации и различные системы счисления пути, что ведет к увеличению массогабаритных характеристик, обусловливает сложность и высокую стоимость таких систем.
Ряд подвижных объектов, таких как беспилотные и дистанционно-пилотируемые летательные аппараты, для своего успешного применения выдвигают первоочередные требования по массогабаритным характеристикам, автономности функционирования, минимального энергопотребления и стоимости навигационной системы. При этом возрастающее множество объектов применения и решаемых навигационных задач обусловливает необходимость создания малогабаритных автономных или ограниченно автономных навигационных систем среднего класса точности, различающихся, в основном, алгоритмическим и программным обеспечением, что определяет актуальность темы диссертационного исследования.
Целью диссертационной работы является разработка структуры программно-технического комплекса (ПТК) системы ориентации и навигации, алгоритмов обработки измерительной информации, разработка математических моделей бесплатформенных инерциальных навигационных систем (БИНС), исследование методов повышения точности определения координат и углов ориентации летательного аппарата при минимизации массогабаритных характеристик и сохранении точности позиционирования, предъявляемой к объектам управления.
Для достижения указанной цели необходимо решить следующие задачи:
Осуществить выбор математической модели инерциальной навигационной системы с коротким временем функционирования на основе существующих элементов и систем навигации летательных аппаратов для выбора перспективных элементов, обладающих меньшими массогабаритными параметрами и меньшей стоимостью.
Выполнить сравнительный анализ известных методов и алгоритмов комплексирования информации БИНС и спутниковых навигационных систем (СНС).
Предложить структуру программно-технического комплекса ориентации и навигации для маломаневренного беспилотного летательного аппарата с БИНС, корректируемой от СНС.
Синтезировать алгоритмы оценивания параметров движения для работы системы автоматического управления движением для беспилотного летательного аппарата (БПЛА) с коротким временем функционирования. При этом необходимо учесть, что навигационные наблюдения имеют разнородный характер и вычисляются в различных системах координат.
Разработать программное обеспечение (ПО) для специализированного вычислителя, реализующее алгоритмы функционирования комплекса ориентации, навигации и управления для беспилотного летательного аппарата.
Провести испытание программно-технического комплекса ориентации и навигации БИНС на предмет вычисления навигационных параметров в составе цифровой бортовой системы автоматического управления летательного аппарата.
Методы исследований При решении задач, рассматриваемых в диссертации, были использованы методы математического анализа и автоматизированного моделирования, теории инерциальной навигации, теории вероятностей и математической статистики, системного и событийно-ориентированного программирования.
Научная новизна диссертационной работы состоит в следующем:
Разработана классификация элементов бесплатформенных инерциальных навигационных систем и представлено описание их математических моделей.
На основе математических моделей определены методы и алгоритмы функционирования БИНС, которые целесообразно использовать в системах с коротким временем функционирования.
Предложена методика комплексной обработки параметров рассчитываемых БИНС (углы ориентации, векторы скорости и координат) с учетом коррекции от спутниковой навигационной системы (СНС).
Предложена структура программно-технического комплекса ориентации и навигации, основой которого является БИНС, корректируемая от СНС.
Разработано программное обеспечение бесплатформенной инерциальной навигационной системой (БИНС) для маломаневренного летательного аппарата с коротким временем действия. Алгоритмы БИНС, коррекции от СНС и системы управления были реализованы в виде программного обеспечения для специализированного вычислителя.
Проведены испытания программно-технического комплекса ориентации и навигации на технологическом стенде полунатурного моделирования, имитирующем движение планирующего беспилотного летательного аппарата.
Разработанные алгоритмы комплексирования данных, алгоритмы операционной системы были положены в основу специального программного обеспечения блока управления для малоразмерных беспилотных летательных аппаратов малого времени функционирования. Алгоритмы программ операционной системы также легли в основу вычислителя управления ВУ-7.
Практическая значимость проведенных в диссертации исследований подтверждена актами о регистрации программ ЭВМ, а также актами внедрения результатов исследований в ОАО МНПК «Авионика».
Основные положения диссертационной работы докладывались и обсуждались на следующих научно-технических конференциях:
Научно-техническая конференция студентов, аспирантов и молодых специалистов МИЭМ. 2008. Москва.
Научно-техническая конференция студентов, аспирантов и молодых специалистов МИЭМ. 2009. Москва.
Научно-техническая конференция студентов, аспирантов и молодых специалистов МИЭМ. 2010. Москва.
Конкурс научно-технических работ и проектов молодых ученых и специалистов «Молодежь и будущее авиации и космонавтики» 2010. Москва.
VII Международная научная конференция «Новые информационные технологии и менеджмент качества» 2010. Турция.
ПубликацииПо теме диссертации автором опубликовано 7 научных работ из них 2 в журнале из перечня ВАК.
На разработанное в ходе работы программное обеспечение получено 6 свидетельств о государственной регистрации программы для ЭВМ.
Структура и объем работы Диссертация состоит из введения, пяти глав, заключения, списка литературы. Основное содержание диссертации изложено на 132 страницах машинописного текста, содержит 9 таблиц и 54 рисунка. Библиография включает 91 наименование.
Бесплатформенная инерциальная навигационная система
Многочисленные исследования и практика эксплуатации спутниковых систем показывают, что наиболее перспективным средством коррекции ИНС являются спутниковые системы, обладающие наиболее высокой точностью и глобальностью действия. При этом возможно улучшение характеристик автономных БИНС не только по координатам и скоростям, но и по углам ориентации.
Таким образом, объединение ИНС, СНС и других систем позволяет получить комплекс нового качества, обладающий всеми преимуществами составляющих его подсистем.
Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений, в глобальной рабочей зоне в составе современных СНС типа ГЛОНАСС и GPS функционируют три основные системы: — система космических аппаратов, состоящая из навигационных ИСЗ (сеть навигационных спутников или космический сегмент); — система контроля и управления (наземный командно-измерительный комплекс или сегмент управления); — аппаратура потребителей (приемоиндикаторы (ПИ) или сегмент потребителей). Основной операцией, выполняемой в СНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т.е. пространственно-временных координат. Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. [18, 23, 67]. В рамках этой концепции в СНС выбран позиционный способ определения местонахождения потребителей на основе пассивных дальномерных измерений по сигналам нескольких навигационных спутников земли с известными координатами. Выбор концепции независимой навигации и использования беззапросных измерений обеспечили возможность достижения неограниченной пропускной способности СНС. Высокая точность определения местоположения потребителей обусловлена многими факторами, включая взаимное расположение спутников и параметры их навигационных сигналов. Структура космического сегмента обеспечивает для потребителей постоянную видимость требуемого числа спутников и описана в [67, 68].
С приемоиндикатора спутниковой навигационной системы поступает навигационная информация после соответствующей обработки радиосигналов глобальных навигационных систем ГЛОНАС [16,17, 18] и GPS NAVSTAR [2,20].
Рассмотрим точностные характеристики СНС ГЛОНАС и GPS NAVSTAR, которые необходимы для решения навигационных задач.
Основными погрешностями при определении псевдодальности (ПД) являются: погрешности эфемеридной информации (ЭИ), частотно-временных поправок (ЧВП), ошибки за счет шумов приемников и внешних помех, многолучевости и особенностей распространения радиоволн в тропосфере и ионосфере. В соответствии с этим СКО суммарной погрешности ПД для системы ГЛОНАСС запишется в виде: где аэи, ас, сгтп, гион, сгАШ, уш — СКО определения ПД соответственно за счет погрешностей
ЭИ, синхронизации (ЧВП), знания скорости распространения радиоволн в тропосфере и ионосфере, многолучевости, шумов приемника и помех. По оценкам [37] уровень суммарных погрешностей (СКО) определения псевдодальностей за счет ЭИ, ЧВП, шумов приемника, многолучевости и тропосферы находится в пределах 6,2. 6,6 м и 7,7. 9,6 м соответственно для околозенитных и пригоризонтных НКА. За счет этих погрешностей 2 СКО (2 dims) местоопределения (с вероятностью 0,95) составят 15. 21 м, а соответствующие ошибки определения высоты (2 СКО) — 34. 42 м. Там же в [37, 67] приведены уровни максимальных ионосферных ошибок, составляющих в худший сезон (зимний день в год максимальной солнечной активности) 21. 42 м по координатам и 64. 102 м — по высоте. В годы минимальной солнечной активности максимальные уровни ионосферных погрешностей составят 5. 7 м по координатам и 6. 10 м по высоте.
Поэтому суммарно в наихудшем случае с помощью современной многоканальной НАП (не менее шести каналов), использующей открытые узкополосные однодиапазонные (1600 МГц) навигационные радиосигналы системы ГЛОНАСС, можно обеспечить оперативную глобальную навигацию подвижных объектов с максимальными погрешностями определения трех координат объекта: 60 м в плане и 100 м по высоте в годы максимальной солнечной активности; 30 м в плане и 50 м по высоте в годы минимальной солнечной активности.
Погрешности (с вероятностью 0,95) навигационных определений в СРНС GPS составляют (см. ниже) 100 м в плане и 156 м по высоте и, таким образом, точность навигации по открытому сигналу в СНС ГЛОНАСС в 2,5 раза выше, чем в СНС GPS [5,68].
Представляют также интерес оценки точности ГЛОНАСС, полученные в Лаборатории Линкольна Массачусетского технологического института [16], полученные с помощью приемника Ashtech GG-24 по 11 НКА. Анализ результатов показывает, что при хороших геометрических факторах, свойственных системе с полной группировкой НКА, точность местоопределения достаточно высока. В 50% случаев ошибки в плане находятся в пределах 12 м, а большие ошибки имеют место вследствие значительного ухудшения HDOP (HDOP 2 в 37% случаев). Погрешности определения горизонтальных составляющих скорости в 50% случаев не превосходят 0,03 м/с. Аналогично, вертикальные составляющие скорости в 50% случаев не превосходят 0,05 м/с.
Информационным обеспечением современного комплекса обычно является инерциальная навигационная система.
Инерциальная навигационная система (ИНС) обеспечивает непрерывную выработку информации о курсе, координатах, скорости движения и параметрах угловой ориентации платформы, на которой установлена ИНС [22,56,60,75]. Как известно, инерциальные навигационные системы позволяют получать всю совокупность необходимых параметров для управления объектом, включая углы ориентации. При этом системы полностью автономны, т. е. для их нормального функционирования не требуется использования какой- либо информации от других систем, за исключением начала работы, когда требуется задать начальные условия по координатам и проекциям скорости.
Теория ИНС создана трудами многих выдающихся ученых, среди которых следует особо отметить академиков РАН А.Ю. Ишлинского и Д.М. Климова. Она основывается на решении двух классических задач теоретической механики: интегрировании динамических уравнений Ньютона в подвижных осях и решении кинематических уравнений Пуассона, определяющих изменение взаимной ориентации подвижной и инерциальной систем. На этой основе получены уравнения идеальной (невозмущенной) работы ИНС, позволившие сформулировать основные принципы инерциальной навигации [26, 27, 28, 29].
Видео:Метод Крамера за 3 минуты. Решение системы линейных уравнений - bezbotvyСкачать
Алгоритм БИНС для работы в географической системе координат
Совместное использование данных нескольких навигационных приборов позволяет повысить точность и достоверность процедур определения положения объекта. Оптимальное решение состоит в объединении всех доступных навигационных наблюдений в единый вектор с последующей многомерной оптимальной фильтрацией. Однако нелинейная взаимосвязь параметров и различный темп их поступления, делают нецелесообразным синтез такого сложного нелинейного фильтра [39, 51].
Квазиоптимальным подходом к решению задачи комплексирования является раздельная фильтрация потоков данных от каждого датчика с последующим их комплексированием с весами, зависящими от точности полученных оценок. В результате работы фильтра Калмана становится известна величина погрешности оценки вектора параметров положения объекта. Система вычисляет линейную взвешенную сумму оценок, полученных с разных датчиков. Чем больше погрешность оценки, тем-с меньшим весом она используется [69, 70].
Широкое применение СНС стало возможным с вводом в эксплуатацию среднеорбитальных систем второго поколения ГЛОНАСС и GPS. Разработано значительное число типов аппаратуры потребителей (АП).
Одновременно растет осознание необходимости мер и проводятся мероприятия по повышению точности, помехоустойчивости АП, обеспечению непрерывности работы навигационных средств в условиях существования естественных и искусственных помех, маневрирования воздушных судов (ВС), качки морских судов (МС), затенения антенн АП и возможного ухудшения качества навигационных сигналов космических аппаратов СРНС.
Важнейшим направлением этого процесса является комплексирование и совместная обработка информации СНС с информацией других навигационных систем и устройств. Этому способствует то обстоятельство, что на многих объектах, помимо АП СНС размещаются и используются такие средства, как инерциальные и инерциально- доплеровские навигационные системы (ИНС и ИДНС), курсо-доплеровские и курсо- воздушные системы счисления, одометрические системы, аппаратура радиотехнических систем ближней (РСБН) и дальней (РСДН) навигации и др. Все воздушные суда имеют также средства измерения барометрической и геометрической высоты полета, а МС — эхолоты. На некоторых летательных аппаратах помимо этого имеется банк данных о высоте рельефа местности. В состав оборудования различных объектов входят также датчики времени (часы).
Объединение (интеграция) оборудования в единый функционально, структурно и конструктивно взаимосвязанный программно-технический навигационный комплекс позволяет полнее использовать имеющуюся на борту летательного аппарата (ЛА) избыточность информации, благодаря чему появляется возможность повышения точности, помехоустойчивости, непрерывности и надежности навигационных определений, расширения круга решаемых задач и улучшения качества их выполнения [3].
В работе [67] дан обзор основных принципов, направлений, методов и способов комплексирования СРНС и других измерителей, проанализированы полученные результаты и указаны наиболее вероятные направления дальнейших работ. Выполненный анализ показал, что при этом используются следующие принципы комплексирования: — совмещение функций различных радиотехнических систем, приводящее к появлению многофункциональных интегрированных комплексов. Пример реализации — разработка многофункциональных комплексов, которые создаются на базе существующих систем связи, навигации и опознавания; — объединение технических средств, измеряющих одни и те же или функционально связанные навигационные параметры, комплексная (совместная) обработка информации (КОИ) и взаимная информационная поддержка нескольких устройств или систем НК. Общие идеи методов комплексной обработки навигационной информации восходят к К. Гауссу, а основные ее методы были созданы и получили дальнейшее развитие в работах Колмогорова А.Н., Н. Винера, JI. Заде и Дж. Рагаззини, Р. Калмана, Пугачева B.C. и др. Естественно, что максимального выигрыша от комплексирования навигационных измерителей можно достичь, решив соответствующую задачу синтеза, что позволяет определить единую оптимальную структуру и характеристики системы комплексирования. Однако общая сложность проблемы такова, что такая задача пока практически решается отдельно на уровнях первичной и вторичной обработки информации, деление на которые по существу является условным. Под первичной обработкой информации (ПОИ) понимают поиск, обнаружение, селекцию, преобразование и обработку (в режиме слежения) сигналов навигационных и специальных измерителей с целью определения соответствующих радионавигационных параметров. Например, псевдодальности (ПД) и приращения ПД или псевдоскорости (ПС). Под вторичной обработкой информации (ВОИ) понимают выполняемую в ЭВМ обработку выходных данных самих измерителей, результаты которой используются для определения и уточнения координат и скорости движения, углов ориентации JIA и источников погрешностей измерителей. Если вычисление параметров движения осуществляется в АП СРНС, то может вводиться термин «предварительная ВОИ» (ПВОИ). С другой стороны, при глубокой коррекции ИНС иногда используется понятие первичной обработки сигналов и ее чувствительных элементов. Рассмотрим методы вторичной обработки навигационной информации. Комплексирование навигационных измерений [62, 66, 77, 78]: — уточнение углов ориентации (курса, крена и тангажа), оценку и уточнение параметров калибровки навигационных датчиков, таких, как дрейфы гироскопов, масштабные коэффициенты, смещения акселерометров и др.; — обеспечение на этой основе непрерывности навигационных определений подвижного объекта и повышение точности определения координат, высоты, скорости объекта на всех этапах его движения, в том числе и при временной неработоспособности АП СНС в случаях воздействия помех или энергичных маневров объекта; — улучшение характеристик целостности навигационных определений, т. е. способности за счет совместной обработки информации автономных средств (особенно БИНС) и СНС обеспечивать решение задачи бортового автономного контроля целостности — CAIM или для авиации — AAIM (Airborne Autonomous Integrity Monitoring), в дополнение к контролю целостности, осуществляемому в приемнике СРНС (RAIM); — обеспечение за счет более точной информации, полученной в процессе вторичной обработки, сокращения времени поиска и вхождения в режим слежения, а также улучшение характеристик контуров слежения за кодом, частотой и фазой несущей частоты, сужение соответствующих полос пропускания и, как следствие, повышение помехозащищенности АП СНС.
Видео:Матричный метод решения систем уравненийСкачать
Особенности применения аналого-цифровых преобразователей в БИНС
Интерес зарубежных и отечественных фирм к оптическому гироскопу базируется на его потенциальных возможностях применения в качестве чувствительного элемента вращения в инерциальных системах навигации, управления и стабилизации. Этот прибор в ряде случаев может полностью заменить сложные и дорогостоящие электромеханические (роторные) гироскопы и трехосные гиростабилизированные платформы [76].
Возможность создания реального высокочувствительного ВОГ появилась лишь с промышленной разработкой одномодового диэлектрического световода с малым затуханием. Именно конструирование ВОГ на таких световодах определяет уникальные свойства прибора. К этим свойствам относят: — потенциально высокую чувствительность (точность) прибора, которая уже сейчас на экспериментальных макетах 0,1 град/ч и менее; — малые габариты и массу конструкции, благодаря возможности создания ВОГ полностью на интегральных оптических схемах; — невысокую стоимость производства и конструирования при массовом изготовлении и относительную простоту технологии; — ничтожное потребление энергии, что имеет немаловажное значение при использовании ВОГ в бортовых комплексах; — большой динамический диапазон измеряемых угловых скоростей (в частности, например, одним прибором можно измерять скорость поворота от 1 град/ч до 500 град/с); — отсутствие вращающихся механических элементов (роторов) и подшипников, что повышает надежность и удешевляет их производство; — практически мгновенную готовность к работе, поскольку не затрачивается время на раскрутку ротора; — нечувствительность к большим линейным ускорениям и следовательно, работоспособность в условиях высоких механических перегрузок; — высокую помехоустойчивость, низкую чувствительность к мощным внешним электромагнитным воздействиям благодаря диэлектрической природе волокна; — слабую подверженность проникающей гамма-нейтронной радиации, особенно в диапазоне 1,3 мкм. Волоконный оптический, гироскоп может быть применен в качестве жестко закрепленного на корпусе носителя чувствительного элемента (датчика) вращения в инерциальных системах управления и стабилизации. Механические гироскопы имеют так называемые гиромеханические ошибки, которые особенно сильно проявляются при маневрировании летательного аппарата. Эти ошибки еще более значительны если инерциальная система управления конструируется с жестко закрепленными или «подвешенными» датчиками непосредственно к телу носителя. Перспектива использования дешевого оптического датчика вращения, который способен работать без гиромеханических ошибок в инерциальной системе управления, есть еще одна причина особого интереса к оптическому гироскопу. Появление идеи и первых конструкций волоконного оптического гироскопа тесно связано с разработкой кольцевого лазерного гироскопа (КЛГ). В КЛГ чувствительным контуром является кольцевой самовозбуждающийся резонатор с активной газовой средой и отражающими зеркалами, в то время как в ВОГ пассивный многовитковый диэлектрический световодный контур возбуждается «внешним» источником светового излучения. Эти особенности определяют по крайней мере пять преимуществ ВОГ по сравнению с КЛГ: — В ВОГ отсутствует синхронизация противоположно бегущих типов колебаний вблизи нулевого значения угловой скорости вращения, что позволяет измерять очень малые угловые скорости, без необходимости конструировать сложные в настройке устройства смещения нулевой точки; — Эффект Саньяка, на котором основан принцип работы прибора, проявляется на несколько порядков сильнее из-за малых потерь в оптическом волокне и большой длины волокна. — Конструкция ВОГ целиком выполняется в виде твердого тела (в перспективе полностью на интегральных оптических схемах), что облегчает эксплуатацию и повышает надежность по сравнению с КЛГ. — ВОГ измеряет скорость вращения, в то время как КЛГ фиксирует приращение скорости. — Эти свойства ВОГ, позволяющие создать простые высокоточные конструкции полностью на дешевых твердых интегральных оптических схемах при массовом производстве привлекают пристальное внимание разработчиков систем управления. По мнению ряда зарубежных фирм, благодаря уникальным техническим возможностям ВОГ будут интенсивно развиваться. В специальной научной [14, 24] и периодической литературе проблеме ВОГ уже опубликовано множество научных статей. Анализ этих статей свидетельствует о необходимости дальнейшего изучения этой проблемы и разработки новых способов улучшения качественных характеристик ВОГ. Систематизация и обобщение узловых вопросов теории и практики создания ВОГ также является важным этапом. Сущность вихревого эффекта заключается в следующем. Если в замкнутом оптическом контуре в противоположных направлениях распространяются два световых луча, то при неподвижном контуре фазовые набеги обоих лучей, прошедших весь контур, будут одинаковыми. При вращении контура вокруг оси, нормальной к плоскости контура, фазовые набеги лучей неодинаковы, а разность фаз лучей пропорциональна угловой скорости вращения контура. Для объяснения вихревого эффекта Саньяка разработаны три теории: кинематическая, доплеровская и релятивистская. Наиболее простая из них — кинематическая, наиболее строгая — релятивистская, основанная на общей теории относительности. Рассмотрим вихревой эффект Саньяка в рамках кинематической теории. На рисунке 3.4 изображен плоский замкнутый оптический контур произвольной формы, в котором распространяются в противоположных направлениях две световые волны 1 и 2. Плоскость контура перпендикулярна оси вращения, проходящей через произвольную точку О. Угловую скорость вращения контура обозначим Q. Участок пути светового луча АВ примем бесконечно малым, его длину обозначим Al. Радиус-вектор произвольной точки контура А обозначим г. Отрезок дуги АВ обозначим Л1 . При вращении контура вокруг точки О с угловой скоростью линейная скорость точки А равна и = Q — г. Учитывая, что треугольник АВ В мал: где a — угол между вектором линейной скорости точки = г и касательной АМ к контуру в точке А. Проекция линейной скорости точек контура на направление вектора скорости света в этих точках Если контур неподвижен, то время обхода участка контура АВ=А1 двумя противоположными лучами одинаково; обозначим его dt. Тогда При вращении контура с угловой скоростью кажущееся расстояние между точками А и В для встречно бегущих лучей изменяется. Для волны бегущей из точки А в точку В, т.е. в направлении, совпадающем с направлением вращения контура, расстояние удлиняется, так как за время dt точка В переместится на угол d(p = CI- dt, перейдя в точку С. Это удлинение пути для светового луча будет равно dt, поскольку в каждое мгновение луч направлен по касательной к контуру, по этой же касательной направлена проекция линейной скорости 0 = 0 — cos а = Q г cos а . Таким образом, отрезок пути, проходимый лучом, равен Д1 + о dt. Рассуждая аналогично, для встречно бегущего луча света будет иметь место кажущееся сокращение отрезка пути А1 — dt Считая скорость света инвариантной величиной, кажущиеся удлинения и сокращения путей для встречных лучей можно эквивалентно считать удлинениями и сокращениями отрезков времени, т.е.
Моделирование полета без спутниковой навигационной системы
В состав ИИБ помимо блока датчиков входит блок электроники, в состав которого обязательно включается Аналого-цифровой преобразователь (АЦП) для оцифровки сигналов от датчиков. (АЦП) — устройство, преобразующее напряжение в цифровой код. АЦП может входить в состав датчика или центрального процессора вычислителя, а также может быть отдельным ИИБ. Основными характеристиками АЦП являются разрядность (q), разрешающая способность (R) и частота квантования (F).
Количество разрядов, которое АЦП может дать на выходе, определяет его разрядность. Разрешение АЦП характеризуется минимальным изменением величины аналогового сигнала, которое может быть преобразовано. Если не учитывать зашумленность сигнала, то разрешающая способность АЦП однозначно определяется разрядностью. Так разрешение по напряжению будет равно разности напряжений, соответствующих максимальному и минимальному выходному коду, делённой на количество выходных дискретных значений: R = (Umax — Umin)/q. Однако, на практике, разрешение АЦП ограничивается отношением сигнал/шум входного сигнала. При большой интенсивности шумов невозможно различение соседних уровней входного сигнала, и реальное разрешение описывается эффективной разрядностью (ENOB), меньшей, чем количество разрядов АЦП.
При сильной зашумленности сигнала, младшие разряды АЦП становятся бесполезными. Это необходимо учитывать при проектировании ИИБ.
Если принять максимальную величину значения гироскопа за 200 град/с, а, акселерометра за 50 g, а значения случайной составляющей дрейфов за эт = 0.005 град/с, и Бтха = 2 п соответственно, то максимально допустимые значения цены младшего разряда для датчиков с выходом ±5В будет 0.000125 В и 0.0006 В. То для акселерометра достаточно 14 разрядного АЦП, а для гироскопа требуется не меньше 16-разрядного АЦП. При этом необходимо учитывать уровень шумов присутствующих в сигнале. Частотой дискретизации АЦП является частота выборки цифровых значений из аналогового сигнала, который является непрерывной функцией времени. Таким образом, значения сигнала измеряются через некоторый интервал времени Т = 1Л% а сам исходный сигнал может быть восстановлен из дискретных значений интерполяцией. Точность восстановления ограничивается ошибкой квантования, также, в соответствии с теоремой Котельникова-Шеннона точное восстановление возможно, если частота дискретизации выше, чем удвоенная максимальная частота в спектре сигнала. Принято выделять два основных источника погрешности АЦП, которые могут внести существенную погрешность в измерение угловых скоростей и линейных ускорений. Это ошибки квантования и нелинейность выходной характеристики. Эти оншибки сопровождают любое аналого-цифровое преобразование. Ошибки квантования — следствие ограниченного разрешения АЦП. Данная ошибка не может быть устранена, и, как правило, находится в пределах половины значения младшего значащего разряда. Ошибка не связана с входным сигналом и имеет равномерное распределение. Всем АЦП присущи ошибки, связанные с нелинейностью, которые являются следствием физического несовершенства АЦП. Это приводит к тому, что передаточная характеристика отличается от желаемой линейной функции. Ошибки могут быть уменьшены путём калибровки. Нелинейность принято разделять на интегральную и дифференциальную. Апертурная погрешность возникает из-за дрейфа момента взятия сигнала и может быть проигнорирована, если её величина сравнительно невелика по сравнению с ошибкой квантования. Оцифрованные данные от ИИБ поступают в блоки компенсации ошибок ДУС.и ДЛУ. В этих блоках, в соответствии с выбранной моделью представления сигнала вычисляются.: реальные вектор угловых скоростей и вектор линейных ускорений. Для измерения некоторых компонент выбранных моделей ошибок может потребоваться введение в ИИБ дополнительных датчиков. Наиболее часто встречаются ИИБ дополненные датчиком температуры. Также в случае совместного использование БИНС и СНС или другой корректирующей системы в блоке комплексной обработки информации могут быть получены значения компоненты систематического дрейфа датчика. Для компенсации погрешностей в ИИБ заносятся параметры смещений, масштабный коэффициент и др. Для определения этих параметров производится процедура калибровки [53, 54]. Калибровку можно разделить на: — Калибровку на этапе изготовления ИИБ; — Самокалибровку в момент включения; — Калибровку в процессе работы. Калибровка в процессе работы представляет собой совместное применение БИНС и СНС по слабосвязанной, жестко связанной и глубоко интегрированной схемам, описанным в разделе 1.6. Самокалибровка в момент включения возможна, если известны какие-то измеряемые параметры. Так если объект находится в состоянии покоя, можно оценить и компенсировать смещение нулевого сигнала гироскопа. Если при этом известны углы ориентации, можно уточнить данные акселерометра и наоборот по показаниям акселерометров определить начальное состояние кватерниона и углов ориентации. Тем не менее самокалибровка в момент включения также часто представляет собой совместное применение нескольких систем или приборов. Калибровка на этапе изготовления ИИБ является необходимым самостоятельным этапом изготовления бесплатформенной навигационной системы. На этапе калибровки, должен быть этап тестирования. В ходе которого определяется и систематизируется характер погрешностей элементов ИИБ. Определяется какие из них меняются в процессе работы, какие изменяются от включения к включению, какие изменяются несущественно. Из этих результатов делаются выводы как часто нужно повторять процедуру калибровки.
Рассмотрим подробнее процедуру калибровки для гироскопических датчиков и датчиков линейных ускорений. Наибольшую погрешность в измерения как правило вносят смещения нулевого сигнала, нелинейность выходной характеристики и неортогональность, размещения датчиков.
Для определения смещения нулевого сигнала ИИБ закрепляют на неподвижном основании, и выставляют в горизонт, включают прибор и записывают показания угловых скоростей и показания акселерометров на протяжении некоторого интервала времени. В состоянии покоя, сигналы угловой скорости равняются нулю, тогда сохизм = Въ + БШх, т.к. бгпх — 0, то измеренная осредненные на интервале времени значения угловых скоростей будет постоянными смещениями Bf для соответствующих осей измерений. Смещение в волоконно-оптических датчиках сильно зависит от температуры, поэтому целесообразно в состав ИИБ включить датчик температуры. В термокамере следует получить характеристику В ). Для этого снимаются показания с датчиков угловых скоростей и датчика температуры на диапазоне температур, в которых предполагается работа ПТК. Полученные точки температура/смещение определяют функцию В ). Для акселерометров целесообразно повторить эксперимент для нескольких положений, перпендикулярных горизонтальному. Для каждого такого положения две оси, плоскость которых совпадает с плоскостью горизонта, должны измерять Так, для ИИБ ось О У которого направлена перпендикулярно вверх, = 0 и = 0, поэтому ах»3,4 = зтх и а7тм = Бт2.
 основания, на котором они установлены.
основания, на котором они установлены. (1)
(1) — радиус-вектор, определяющий положение корпуса прибора относительно ц.м. Земли;
— радиус-вектор, определяющий положение корпуса прибора относительно ц.м. Земли; — удельная сила притяжения Земли в центре корпуса акселерометра и являющаяся функцией радиус-вектора
— удельная сила притяжения Земли в центре корпуса акселерометра и являющаяся функцией радиус-вектора  — углы курса, бортовой и килевой качки, определяющие ориентацию осей
— углы курса, бортовой и килевой качки, определяющие ориентацию осей  ИИМ БИНС относительно сопровождающего географического трехгранника
ИИМ БИНС относительно сопровождающего географического трехгранника  ;
; — восточная, северная и вертикальная составляющие линейной скорости объекта относительно Земли;
— восточная, северная и вертикальная составляющие линейной скорости объекта относительно Земли; — широта, долгота и высота места объекта.
— широта, долгота и высота места объекта. — составляющие вектора кажущегося ускорения
— составляющие вектора кажущегося ускорения  на оси
на оси  — составляющие вектора угловой скорости
— составляющие вектора угловой скорости  вращения трехгранника
вращения трехгранника 
 осям (рис. 3). Обычно оси ИИМ совпадают со связанными с объектом.
осям (рис. 3). Обычно оси ИИМ совпадают со связанными с объектом.

 угловой скорости вращения объекта с производными по времени от параметров ориентации. Вид кинематических уравнений определяется в зависимости от кинематических параметров, поэтому для углов Эйлера-Крылова, направляющих косинусов, и параметров Родрига-Гамильтона уравнения различны. Для решения кинематических уравнений, как и для любых других дифференциальных уравнений, должны быть известны начальные условия, для чего решается задача начальной выставки.
угловой скорости вращения объекта с производными по времени от параметров ориентации. Вид кинематических уравнений определяется в зависимости от кинематических параметров, поэтому для углов Эйлера-Крылова, направляющих косинусов, и параметров Родрига-Гамильтона уравнения различны. Для решения кинематических уравнений, как и для любых других дифференциальных уравнений, должны быть известны начальные условия, для чего решается задача начальной выставки. , то кинематические уравнения имеют следующий вид
, то кинематические уравнения имеют следующий вид ,
, , (2)
, (2) ,
, – проекции на свои оси угловой скорости вращения географического сопровождающего трехгранника
– проекции на свои оси угловой скорости вращения географического сопровождающего трехгранника  . (3)
. (3) , (4)
, (4) — кососимметрическая матрица, соответствующая вектору
— кососимметрическая матрица, соответствующая вектору  — кососимметрическая матрица, соответствующая вектору
— кососимметрическая матрица, соответствующая вектору  угловой скорости вращения географического сопровождающего трехгранника
угловой скорости вращения географического сопровождающего трехгранника  осуществляющий переход от географического сопровождающего трехгранника
осуществляющий переход от географического сопровождающего трехгранника  (5)
(5) – гиперкомплексное отражение вектора
– гиперкомплексное отражение вектора  – гиперкомплексное отражение вектора
– гиперкомплексное отражение вектора  . (6)
. (6) . (7)
. (7) по следующим формулам:
по следующим формулам: ,
,  ,
,  , (8)
, (8) — элементы матрицы ориентации
— элементы матрицы ориентации  .
. и
и  меньше 90º, то приведенные выше выражения однозначно определяют значения углов килевой и бортовой качек. Внутри диапазона от 0 до 360º функция
меньше 90º, то приведенные выше выражения однозначно определяют значения углов килевой и бортовой качек. Внутри диапазона от 0 до 360º функция  разрывов не имеет и однозначно определяет значение угла
разрывов не имеет и однозначно определяет значение угла  .
. кажущегося ускорения, измеряемого блоком акселерометров в осях ИИМ, преобразуются к осям географического сопровождающего трехгранника
кажущегося ускорения, измеряемого блоком акселерометров в осях ИИМ, преобразуются к осям географического сопровождающего трехгранника  следующим образом
следующим образом . (9)
. (9) , приведенных к осям географического сопровождающего трехгранника, необходимо исключить так называемые «вредные» ускорения, определяющие кориолисово и переносное ускорения ц.м. объекта или точнее точки расположения блока акселерометров на объекте, а также составляющие вектора
, приведенных к осям географического сопровождающего трехгранника, необходимо исключить так называемые «вредные» ускорения, определяющие кориолисово и переносное ускорения ц.м. объекта или точнее точки расположения блока акселерометров на объекте, а также составляющие вектора  ускорения силы тяжести.
ускорения силы тяжести. ускорений формируются в вычислителе БИНС по данным, вырабатываемым самой БИНС, и априорным данным о параметрах Земли: форме, размерах и угловой скорости вращения, по следующим формулам:
ускорений формируются в вычислителе БИНС по данным, вырабатываемым самой БИНС, и априорным данным о параметрах Земли: форме, размерах и угловой скорости вращения, по следующим формулам: (10)
(10) , (11)
, (11) м/с 2 , для параметров эллипсоида Красовского: b=0.0053171, b1=0.0000071.
м/с 2 , для параметров эллипсоида Красовского: b=0.0053171, b1=0.0000071. (12)
(12) по данным о составляющих вектора линейной скорости объекта в навигационных осях, радиусах кривизны нормальных сечений и широте места для формирования обратной связи в задачу ориентации.
по данным о составляющих вектора линейной скорости объекта в навигационных осях, радиусах кривизны нормальных сечений и широте места для формирования обратной связи в задачу ориентации. ,
,  ,
,  , (13)
, (13) °/ч — угловая скорость суточного вращения Земли.
°/ч — угловая скорость суточного вращения Земли.
 (14)
(14) м – параметры эллипсоида Красовского.
м – параметры эллипсоида Красовского.
 (15)
(15) .
.

.gif)
.gif)
.gif)

.gif)

.gif)







.gif)





.gif)
 ,
, .gif)
.gif) – составляющие ускорения объекта соответственно по осям Z g , Y g ,X g географической системы координат.
– составляющие ускорения объекта соответственно по осям Z g , Y g ,X g географической системы координат. .gif)
.gif) ,
, 
.gif) – составляющие ускорения объекта соответственно по осям Zg, Yg, Xg географической системы координат путем удаления из них вредных составляющих: ускорения Кариолиса, относительного ускорения и ускорения силы тяжести.
– составляющие ускорения объекта соответственно по осям Zg, Yg, Xg географической системы координат путем удаления из них вредных составляющих: ускорения Кариолиса, относительного ускорения и ускорения силы тяжести..gif)

.gif)







.gif)

 , три компоненты кажущегося ускорения в связанной системе координат (
, три компоненты кажущегося ускорения в связанной системе координат ( .gif)
.gif) , а также проекции вектора напряженности магнитного поля Земли (
, а также проекции вектора напряженности магнитного поля Земли ( 
.gif) на оси связанной системы координат.
на оси связанной системы координат. 
.gif) , частота 0,1 Гц; тангаж —
, частота 0,1 Гц; тангаж — .gif)
.gif) , частота 0,15 Гц; крен —
, частота 0,15 Гц; крен — .gif)
 , частота 0,2 Гц. Время моделирования 100 с.
, частота 0,2 Гц. Время моделирования 100 с.