2 й закон ньютона и дифференциальное уравнение для вынужденных колебаний
Обновлено
Поделиться
2 й закон ньютона и дифференциальное уравнение для вынужденных колебаний
Колебания, совершающиеся под воздействием внешней периодической силы, называются вынужденными .
В этом случае внешняя сила совершает положительную работу и обеспечивает приток энергии к колебательной системе. Она не дает колебаниям затухать, несмотря на действие сил трения.
Периодическая внешняя сила может изменяться во времени по различным законам. Особый интерес представляет случай, когда внешняя сила, изменяющаяся по гармоническому закону с частотой , воздействует на колебательную систему, способную совершать собственные колебания на некоторой частоте .
Если свободные колебания происходят на частоте , которая определяется параметрами системы, то установившиеся вынужденные колебания всегда происходят на частоте внешней силы .
После начала воздействия внешней силы на колебательную систему необходимо некоторое время для установления вынужденных колебаний. Время установления по порядку величины равно времени затухания свободных колебаний в колебательной системе.
В начальный момент в колебательной системе возбуждаются оба процесса – вынужденные колебания на частоте и свободные колебания на собственной частоте . Но свободные колебания затухают из-за неизбежного наличия сил трения. Поэтому через некоторое время в колебательной системе остаются только стационарные колебания на частоте внешней вынуждающей силы.
Рассмотрим в качестве примера вынужденные колебания тела на пружине (рис. 2.5.1). Внешняя сила приложена к свободному концу пружины. Она заставляет свободный (левый на рис. 2.5.1) конец пружины перемещаться по закону
m cos .
где m – амплитуда колебаний, – круговая частота.
Такой закон перемещения можно обеспечить с помощью шатунного механизма, преобразующего движение по окружности в поступательно-возвратное движение (рис. 2.5.1).
Рисунок 2.5.1.
Если левый конец пружины смещен на расстояние , а правый – на расстояние от их первоначального положения, когда пружина была недеформирована, то удлинение пружины равно:
m cos .
Второй закон Ньютона для тела массой принимает вид :
m cos .
В этом уравнении сила, действующая на тело, представлена в виде двух слагаемых. Первое слагаемое в правой части – это упругая сила, стремящаяся возвратить тело в положение равновесия (). Второе слагаемое – внешнее периодическое воздействие на тело. Это слагаемое и называют вынуждающей силой .
Уравнению, выражающему второй закон Ньютона для тела на пружине при наличии внешнего периодического воздействия, можно придать строгую математическую форму, если учесть связь между ускорением тела и его координатой: Тогда уравнение вынужденных колебаний запишется в виде
(**)
где – собственная круговая частота свободных колебаний, – циклическая частота вынуждающей силы. В случае вынужденных колебаний груза на пружине (рис. 2.5.1) величина определяется выражением:
Уравнение (**) не учитывает действия сил трения. В отличие от уравнения свободных колебаний (*) (см. §2.2) уравнение вынужденных колебаний (**) содержит две частоты – частоту свободных колебаний и частоту вынуждающей силы.
Установившиеся вынужденные колебания груза на пружине происходят на частоте внешнего воздействия по закону
mcos .
Амплитуда вынужденных колебаний m и начальная фаза зависят от соотношения частот и и от амплитуды ym внешней силы.
На очень низких частотах, когда , движение тела массой , прикрепленного к правому концу пружины, повторяет движение левого конца пружины. При этом , и пружина остается практически недеформированной. Внешняя сила приложенная к левому концу пружины, работы не совершает, т. к. модуль этой силы при стремится к нулю.
Если частота внешней силы приближается к собственной частоте , возникает резкое возрастание амплитуды вынужденных колебаний. Это явление называется резонансом . Зависимость амплитуды m вынужденных колебаний от частоты вынуждающей силы называется резонансной характеристикой или резонансной кривой (рис. 2.5.2).
При резонансе амплитуда m колебания груза может во много раз превосходить амплитуду m колебаний свободного (левого) конца пружины, вызванного внешним воздействием. В отсутствие трения амплитуда вынужденных колебаний при резонансе должна неограниченно возрастать. В реальных условиях амплитуда установившихся вынужденных колебаний определяется условием: работа внешней силы в течение периода колебаний должна равняться потерям механической энергии за то же время из-за трения. Чем меньше трение (т. е. чем выше добротность колебательной системы), тем больше амплитуда вынужденных колебаний при резонансе.
У колебательных систем с не очень высокой добротностью () резонансная частота несколько смещается в сторону низких частот. Это хорошо заметно на рис. 2.5.2.
Явление резонанса может явиться причиной разрушения мостов, зданий и других сооружений, если собственные частоты их колебаний совпадут с частотой периодически действующей силы, возникшей, например, из-за вращения несбалансированного мотора.
Рисунок 2.5.2.
Вынужденные колебания – это незатухающие колебания. Неизбежные потери энергии на трение компенсируются подводом энергии от внешнего источника периодически действующей силы. Существуют системы, в которых незатухающие колебания возникают не за счет периодического внешнего воздействия, а в результате имеющейся у таких систем способности самой регулировать поступление энергии от постоянного источника. Такие системы называются автоколебательными , а процесс незатухающих колебаний в таких системах – автоколебаниями . В автоколебательной системе можно выделить три характерных элемента – колебательная система, источник энергии и устройство обратной связи между колебательной системой и источником. В качестве колебательной системы может быть использована любая механическая система, способная совершать собственные затухающие колебания (например, маятник настенных часов).
Источником энергии может служить энергия деформация пружины или потенциальная энергия груза в поле тяжести. Устройство обратной связи представляет собой некоторый механизм, с помощью которого автоколебательная система регулирует поступление энергии от источника. На рис. 2.5.3 изображена схема взаимодействия различных элементов автоколебательной системы.
Рисунок 2.5.3.
Примером механической автоколебательной системы может служить часовой механизм с анкерным ходом (рис. 2.5.4). Ходовое колесо с косыми зубьями жестко скреплено с зубчатым барабаном, через который перекинута цепочка с гирей. На верхнем конце маятника закреплен анкер (якорек) с двумя пластинками из твердого материала, изогнутыми по дуге окружности с центром на оси маятника. В ручных часах гиря заменена пружиной, а маятник – балансиром – маховичком, скрепленным со спиральной пружиной. Балансир совершает крутильные колебания вокруг своей оси. Колебательной системой в часах является маятник или балансир. Источником энергии – поднятая вверх гиря или заведенная пружина. Устройством, с помощью которого осуществляется обратная связь, является анкер, позволяющий ходовому колесу повернуться на один зубец за один полупериод. Обратная связь осуществляется взаимодействием анкера с ходовым колесом. При каждом колебании маятника зубец ходового колеса толкает анкерную вилку в направлении движения маятника, передавая ему некоторую порцию энергии, которая компенсирует потери энергии на трение. Таким образом, потенциальная энергия гири (или закрученной пружины) постепенно, отдельными порциями передается маятнику.
Механические автоколебательные системы широко распространены в окружающей нас жизни и в технике. Автоколебания совершают паровые машины, двигатели внутреннего сгорания, электрические звонки, струны смычковых музыкальных инструментов, воздушные столбы в трубах духовых инструментов, голосовые связки при разговоре или пении и т. д.
Для того чтобы в реально существующей колебательной системе получать незатухающие колебания, следует каким-либо образом компенсировать потери энергии, которые происходят в результате существования сил сопротивления. Самым простым способом реализации незатухающих колебаний является воздействие на систему при помощи внешней периодической силы. Работа внешней силы обеспечить приток энергии в систему извне. Эта энергия не даст колебаниям затухнуть, при действии сил трения.
Колебания, которые возникают под действием периодически меняющейся силы (периодически изменяющейся ЭДС), называют вынужденными механическими (электромагнитными) колебаниями.
Дифференциальное уравнение вынужденных колебаний
Допустим, на механическую колебательную систему действует гармонически изменяющаяся внешняя сила:
Рассмотрим колебания груза на пружине (пружинный маятник). Уравнение незатухающих гармонических колебаний для этой системы можно записать как:
где $x$ — координата; $delta $ — коэффициент затухания; $_0$ — циклическая частота свободных незатухающих колебаний (если $delta $=0, то $_$называют собственной частотой колебаний).
Если рассматривается, например, электрический колебательный контур, то роль периодически действующей силы может играть внешняя ЭДС или переменное напряжение. Их подводят к контуру извне и изменяются они по гармоническому закону. Уравнение колебаний в электрическом контуре можно представить как:
Уравнения (2) и (3) можно свести к линейному неоднородному дифференциальному уравнению вида:
где $s$ — колеблющийся параметр; $x_0=frac$ если колебания механические ($x_0=frac— в случае электрических колебаний$).
Решением уравнения (4) является сумма общего решения однородного уравнения и частного решения неоднородного уравнения. Однородное уравнение при этом имеет вид:
Его общее решение:
где $A_0$ — начальная амплитуда колебаний.
Частное решение уравнения (4) в представлено выражением:
Слагаемое $s_1$ в решении уравнения (5) играет значительную роль в начальной стадии установления колебаний, пока амплитуда вынужденных колебаний не будет определяться выражением (8).
Установившись, вынужденные колебания происходят с частотой $omega $ и являются гармоническими. Амплитуда и фаза этих колебаний определяются равенствами (8) и (9), и они зависят от частоты $omega $.
Резонанс вынужденных колебаний
Если частота вынуждающей силы приближается к собственной частоте колебаний, то возникает резкое увеличение амплитуды колебаний. Такое явление называют резонансом.
Из выражения (8) видно, что амплитуда имеет максимум. Для нахождения резонансной частоты (частоты при которой $A=max$), следует найти максимум функции $A(omega )$. Взяв производную $frac$ и приравняв ее к нулю получим:
Равенство (10) справедливо при:
Получается, что резонансная частота ($_r$) равна:
При $^2ll ^2_0$ резонансная частота совпадает с собственной частотой колебаний $_0.$ Подставим вместо частоты правую часть выражения (11) в формулу (8), получим выражение для резонансной амплитуды вынужденных колебаний:
При небольшом затухании колебаний (если $^2ll ^2_0$) амплитуда при резонансе равна:
где $Q=frac<_0>$ — добротность колебательной системы, величина, характеризующая резонансные свойства колебательной системы. С увеличением добротности увеличивается амплитуда резонанса.
Примеры задач с решением
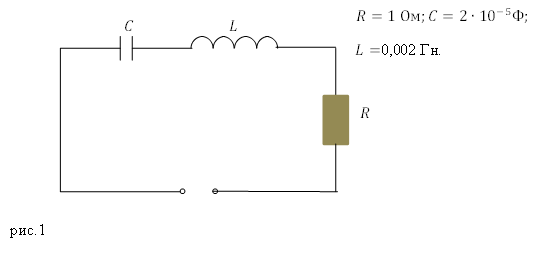
Задание. Какова добротность колебательного контура, представленного на рис.1?
При этом собственная частота колебаний в таком контуре равна:
коэффициент затухания находим как:
Подставляет правые части выражений (1.2) (1.3) вместо соответствующих величин в (1.1), в результате, добротность представленного на рис. 1 контура найдем при помощи формулы:
Ответ. $Q=10$
Задание. Пружинный маятник выполняет вынужденные колебания в вязком веществе. Масса груза на пружине равна $m$, коэффициент упругости пружины $k$. Коэффициент сопротивления среды равен $r$. Систему заставляет совершать колебания сила $F=$Чему равна резонансная амплитуда заданных колебаний ($A_r$)?
Решение. Допустим, что груз совершает колебания вдоль прямой X, тогда уравнением данных механических колебаний будет выражение:
где коэффициент затухания равен $delta =frac$. Из функции, которая задает вынуждающую силу:
мы видим, что амплитуда силы равна единице:
Собственная частота колебаний груза на пружине:
Амплитуда при резонансе таких колебаний равна:
Вынуяеденные колебания. Резонанс
В реальных колебательных системах всегда имеют место потери энергии, что приводит к затуханию колебаний. Система совершает незатухающие колебания, когда на неё действует внешняя, периодически изменяющаяся сила, компенсирующая потери энергии.
Колебания, возникающие в системе под действием периодической внешней силы, называются вынуяеденными. Переменная внешняя сила, приложенная к колебательной системе и вызывающая вынужденные колебания, называется вынуждающей силойF (О-
В колебательном контуре компенсируются потери энергии, если в контур включён источник электрической энергии, основными характеристиками которого являются электродвижущая сила (ЭДС) и внутреннее сопротивление.
Источник электрической энергии в электротехнике называют источником ЭДС (источником напряжения). В механических системах потери энергии компенсируются работой внешних сил по преодолению сил трения.
Вынужденные колебания пружинного маятника происходят под действием вынуждающей силы F ehm.(t), изменяющейся со временем t по гармоническому закону с циклической частотой со
где F вын.(0 — мгновенное значение (в момент времени г) вынуждающей силы,
F т.вын — амплитуда колебаний вынуждающей силы.
На колебательную систему, кроме вынуждающей силы F вын, одновременно действуют упругая сила Fvnp и сила трения Fmp, равные
где к — коэффициент упругости пружины, г — коэффициент пропорциональности.
Уравнение движения тела массой пружинного маятника, по второму закону Ньютона, имеет вид
Пусть маятник движется вдоль оси о х (рис. 190). Запишем уравнение (19.81) в проекции на ось ох
разделим уравнение на т — массу тела и введём обозначения
тогда получим дифференциальное уравнение вынужденных колебаний пружинного маятника
Вывод дифференциального уравнения вынужденных колебаний в электрическом колебательном контуре
В реальном электрическом колебательном контуре электрическое сопротивление R отлично от нуля (рис.191). Поэтому, если возникают свободные колебания в контуре, то они постепенно затухают.
Формула закона Ома для участка цепи 1 -R-L-2 имеет вид
где (g>i — q>2) — разность потенциалов обкладок конденсатора,
равная qjj— (р-> = iL,
С q — электрический заряд на обкладках конденсатора,
С — ёмкость конденсатора,
J — сила электрического тока, J = С 1Я_,
Е (t) — электродвижущая сила (ЭДС) внешнего источника напряжения
Запишем уравнение (19.83) в виде
затем разделим на индуктивность катушки L и введём обозначения
где р — коэффициент затухания свободных колебаний,
а>0 — циклическая частота свободных затухающих колебаний, когда
сопротивление R контура равно нулю (R = 0).
Подставим эти обозначения в (19.84)
Формула (19.85) представляет собой дифференциальное уравнение вынуяеденных колебаний в электрическом колебательном контуре.
Уравнения (19.85) и (19.82) аналогичны друг другу, поэтому заменим их уравнением вида
электрического колебательного контура S = q, 2ft = ,со0 = 1 .
Уравнение (19.86) является линейным неоднородным (с правой частью, отличной от нуля) дифференциальным уравнением второго порядка. Общее решение этого уравнения представляет собой сумму решения однородного уравнения (S одн) и частного решения (S част) неоднородного уравнения
Однородное уравнение для колеблющейся величины S имеет вид
Для пружинного маятника S = х, 2/3 = —,со0 2 = —, F0 =f т.вЬ1Н, а Д ля
где частота со равна
Уравнение (19.88) описывает собственные затухающие колебания величины S. Они прекращаются через некоторый интервал времени (множитель е убывает со временем по экспоненте, поэтому им можно пренебречь).
Величина S совершает незатухающие (установившиеся во времени) вынужденные колебания, описываемые частным решением уравнения (19.87)
где А — амплитуда колебаний, А = S тах,
со — циклическая частота колебаний, равная циклической частоте вынуждающей силы,
А ср — сдвиг по фазе между вынуждающей силой и вынужденными колебаниями.
На рис. 192 показан график установившихся вынужденных колебаний величины S. Характер вынужденных колебаний определяется, как величиной внешней силы, так и свойствами колебательной системы. Собственные затухающие колебания имеют место в течение интервала времени t = t раск , когда происходит раскачка колебательной системы.
Время раскачки t раск зависит от коэффициента затухания Д чем меньше величина Д тем больше это время. Когда прекращаются собственные затухающие колебания, система совершает вынужденные (незатухающие) установившиеся колебания.
Характер вынужденных колебаний изменяется со временем, когда начинает действовать внешняя периодическая сила. Только через некоторое время устанавливаются вынужденные колебания, период Т которых равен периоду внешней силы. Вынужденные колебания возникают тем быстрее, чем больше затухание собственных колебаний в колебательной системе.
Для вывода формул, определяющих амплитуду А установившихся вынужденных колебаний и сдвиг по фазе А C L_§_ в уравнение (19.86)
Каждое слагаемое в данном уравнении описывает гармонически изменяющуюся величину, но для всех слагаемых одинаковая частота со и различные фазы колебаний.
Первое слагаемое на векторной диаграмме (рис. 193) изображается вектором, длина которого равна А со ”. Он направлен в отрицательном направлении горизонтальной оси (противоположно вектору, представляющему третье слагаемое). Третье слагаемое, стоящее в левой части уравнения, представлено на векторной диаграмме вектором, длиной А со0 2 , направленным по горизонтальной оси в положительном направлении (вправо).
Второе слагаемое на векторной диаграмме изображается вектором длиной, равной 2А /> со. Этот вектор повёрнут от
горизонтальной оси на угол 71 против часовой стрелки.
На рис. 194,195 представлен результат сложения трёх векторов, когда со со0.
Векторная сумма векторов с длинами, равными 2А [3 со и А со0 2 должна быть равна вектору длиной F0 (рис. 194).
Результат сложения векторов зависит от соотношения частот со
и С0о. Суммарный вектор длиной F0 является диагональю
прямоугольника со сторонами 2А /3 со и А (со0 со ). Он составляет с
горизонтальной осью угол А соа. В формуле стоит квадрат выражения (со 2 ,, — со 2 ) 2 .
Согласно (19.90), амплитуда А вынужденных колебаний зависит от соотношения собственной частоты со0 и частоты со вынуждающей силы, а так же от коэффициента затухания /1. Заметим, что увеличение амплитуды колебаний ограничено, независимо от соотношения частот со0 и со. Это объясняется тем, что с ростом амплитуды увеличивается скорость колебательного движения, а вместе с ней и сила трения (сила сопротивления). Колебательная система интенсивно расходует энергию. Тогда амплитуда автоматически принимает значение, при котором прибыль энергии извне компенсирует расходы на преодоление трения (на излучение и др.).
Сдвиг по фазе А ср, как следует из векторной диаграммы, определяется формулой
Из формул (19.90) и (19.91) следует, что амплитуда А вынужденных колебаний и сдвиг по фазе А ср между вынужденными колебаниями и вынуждающей силой определяются параметрами, характеризующими вынуждающую силу, такими, как амплитуда А, частота со, а так же параметрами колебательной системы, а именно, собственной частотой колебаний со0, коэффициентом затухания /1.
В механической колебательной системе (пружинный маятник) величины А и А ср зависят от массы т колеблющего тела, а у электрического колебательного контура — индуктивности L катушки. Амплитуда А и сдвиг по фазе А ср установившихся вынужденных колебаний не зависят от времени t и начальных условий.
Вынужденные колебания отстают по фазе от вынуждающей силы, вызывающей их, на величину А ср, зависящую от частоты со вынуждающей силы, которая периодически изменяется во времени. Объясним, почему это происходит на примере механической колебательной системы (пружинного маятника).
Считаем, что в начальный момент времени (t = 0) он покоится. Вынуждающая сила F (?) равна нулю. Затем внешняя сила F (?) смещает тело массы т из положения равновесия, совершая положительную работу.
Через четверть периода (t = Т_) величина внешней силы F (7) и
смещения х достигают максимального значения. Затем, внешняя сила убывает со временем, а тело под действием возвращающей силы (силы упругости F у„р) движется к положению равновесия.
При отсутствии внешней силы тело вернулось бы в положение равновесия (начальное положение) через промежуток времени, равный четверти собственного периода колебаний.
В реальных условиях внешняя сила, убывая по величине со временем, тормозит движение тела. Она совершает отрицательную работу.
Тело движется замедленно, скорость его уменьшается. Колебания пружинного маятника начинают отставать от колебаний вынуждающей силы, опережающей смещение тела.
Следует заметить, что параметры, характеризующие вынужденные колебания, происходящие под действием внешней периодической силы, определяются добротностью Q.
 приложена к свободному концу пружины. Она заставляет свободный (левый на рис. 2.5.1) конец пружины перемещаться по закону
приложена к свободному концу пружины. Она заставляет свободный (левый на рис. 2.5.1) конец пружины перемещаться по закону
 Тогда уравнение вынужденных колебаний запишется в виде
Тогда уравнение вынужденных колебаний запишется в виде
 – собственная круговая частота свободных колебаний, – циклическая частота вынуждающей силы. В случае вынужденных колебаний груза на пружине (рис. 2.5.1) величина определяется выражением:
– собственная круговая частота свободных колебаний, – циклическая частота вынуждающей силы. В случае вынужденных колебаний груза на пружине (рис. 2.5.1) величина определяется выражением:
 приложенная к левому концу пружины, работы не совершает, т. к. модуль этой силы при стремится к нулю.
приложенная к левому концу пружины, работы не совершает, т. к. модуль этой силы при стремится к нулю.




 введём обозначения
введём обозначения














